
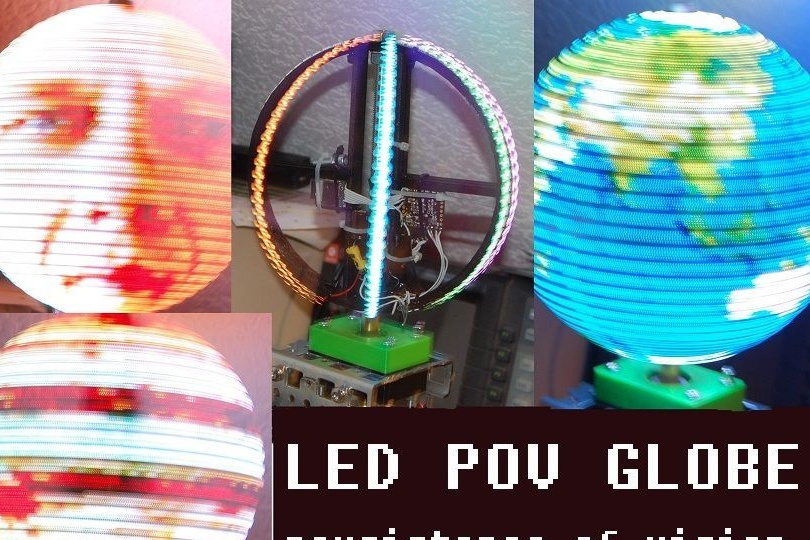
Tutorial ini adalah tentang cara membina dunia POV dengan kurang. elektronik komponen daripada peranti lain yang serupa. Melalui penggunaan LED RGB dengan pengawal APA102 bersepadu. Ini akan menjimatkan pematerian pelbagai wayar. Anda boleh membaca lebih lanjut mengenai mereka. LED ini tidak memerlukan pemandu tambahan. Mereka disambungkan secara langsung kepada mikropengawal dalam dua cara. Ini membolehkan anda untuk menukar LED dengan cepat. Untuk mendapatkan gambaran stabil, penyegerakan SPI datang pada frekuensi 10 MHz. Satu lagi reka bentuk ini ialah penggunaan kad flash, yang menyimpan imej dalam format BMP.
1 Bahan diperlukan

Untuk paksi dunia anda perlu:

1. Stud dengan benang M8 dan panjang 250 mm
2. Nut M8
3. Lengan tembaga 10 mm dan panjang 100 mm
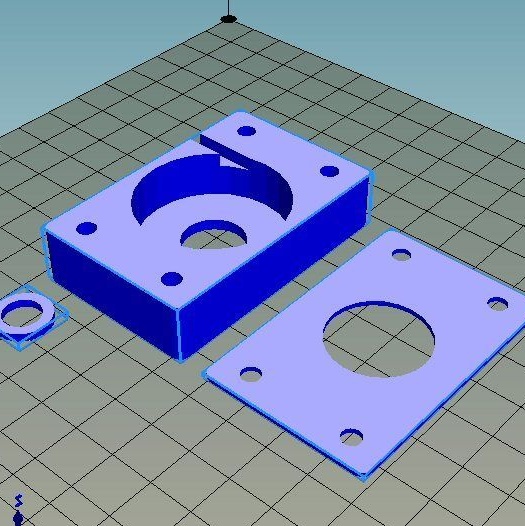
4. Mesin pencuci plastik 8 mm 2 keping (termasuk fail STL)
5. gandingan bagi mereka yang akan menggunakan NEMA motor stepper 17
Untuk kuasa cincin LED pada aci, anda perlu
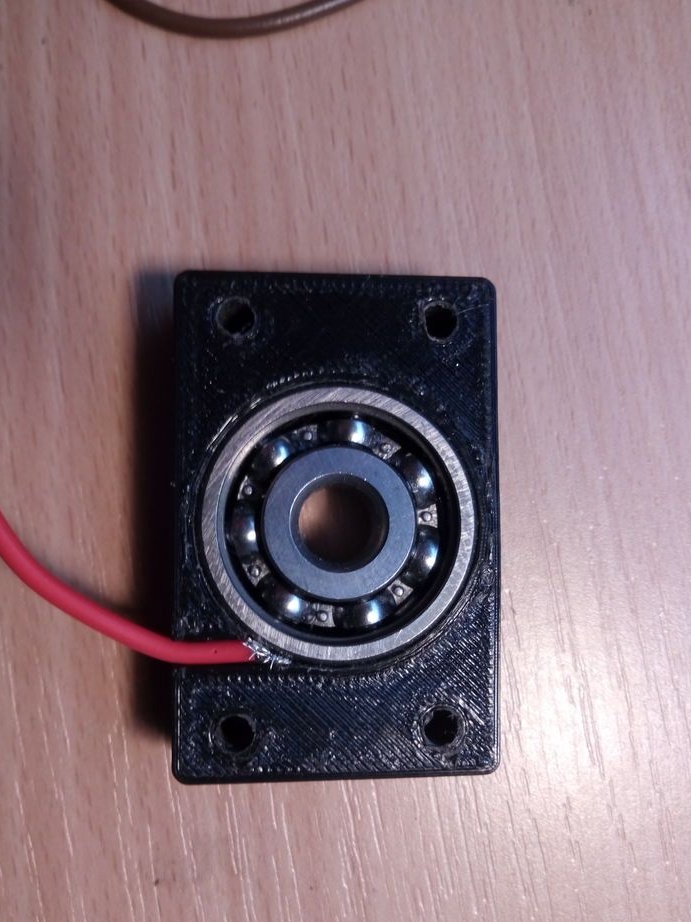
1. bebola bebola 6300 (10x35x11)
2. dua kurungan untuk galas. Dicetak pada pencetak 3d atau diperbuat daripada kayu.
3. Empat bolt M4x40 dengan kacang
4. Tips wayar 2 pcs 8mm
5. dengan garis pusat aci 5mm
6. 4 bolt M4 untuk pemasangan enjin
7. mungkin peminat kepadanya.
Sebagai alternatif, anda boleh menggunakan mana-mana enjin dengan tork kanan dan kawalan kelajuan. Motor yang digunakan dalam reka bentuk ini mempunyai tork maksimum pada arus 50A, tetapi penggunaan semasa maksimum semasa operasi hanya 18A.
Untuk mengawal pemandu servomotor, gunakan
1.
2. dua butang
Bekalan kuasa 12V untuk motor dan 5V untuk LED. Sebagai bekalan kuasa, anda boleh menggunakan unit lama dari PC. Anda boleh membeli bekalan kuasa 12v / 5A dan menyambungkannya
Untuk cincin LED anda perlu:
1.664 LED 2 jalur 32 keping
2. kapasitor 1000μF 10V
3. Dewan sensor dan magnet
4. Resistor pull-up 1k, 10k
5. Cincin mesti dicetak pada pencetak 3D atau menggunakan sekeping paip PVC
6. Hubungan plastik (100 mm)
7. Gam yang baik yang melekat bersama dan tidak terbang di 2500 rpm
Anda juga memerlukan Microcontroller Propeller Parallax. Atau anda boleh menggunakan yang lain model itu pengawal, tetapi juga mengambil bayaran untuk. Pengawal ini diprogramkan dan difahami semudah itu Arduino. Anda memerlukan penyesuai USB-TTL untuk mengendalikan kedua-dua pengawal.
Badan.
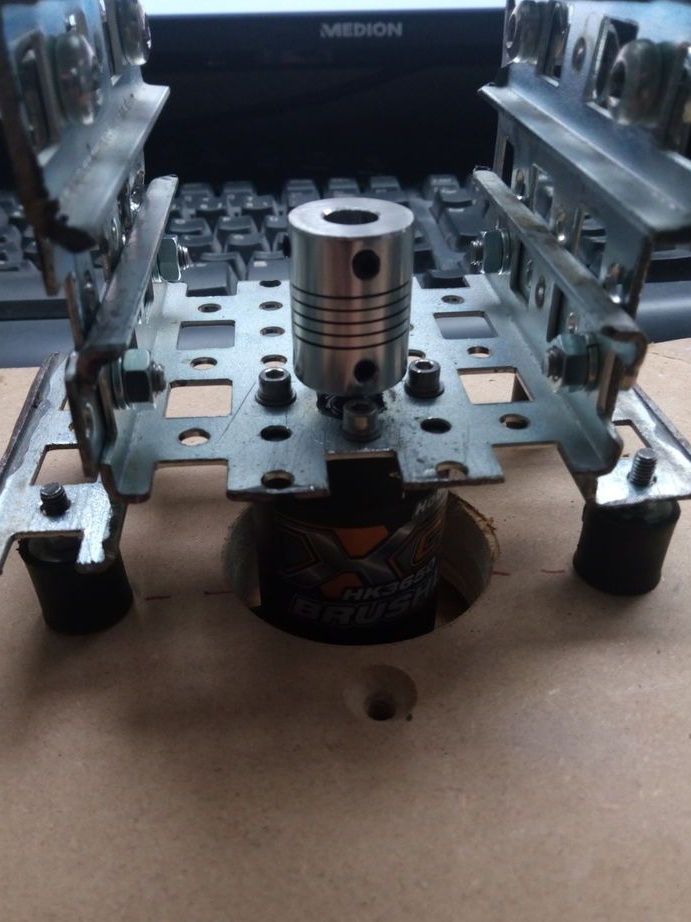
Perumahan untuk buatan sendiri Anda boleh mengambil apa-apa yang cukup keras. Yang paling penting ialah anda boleh mengikat enjin dan bantalan dengan selamat.
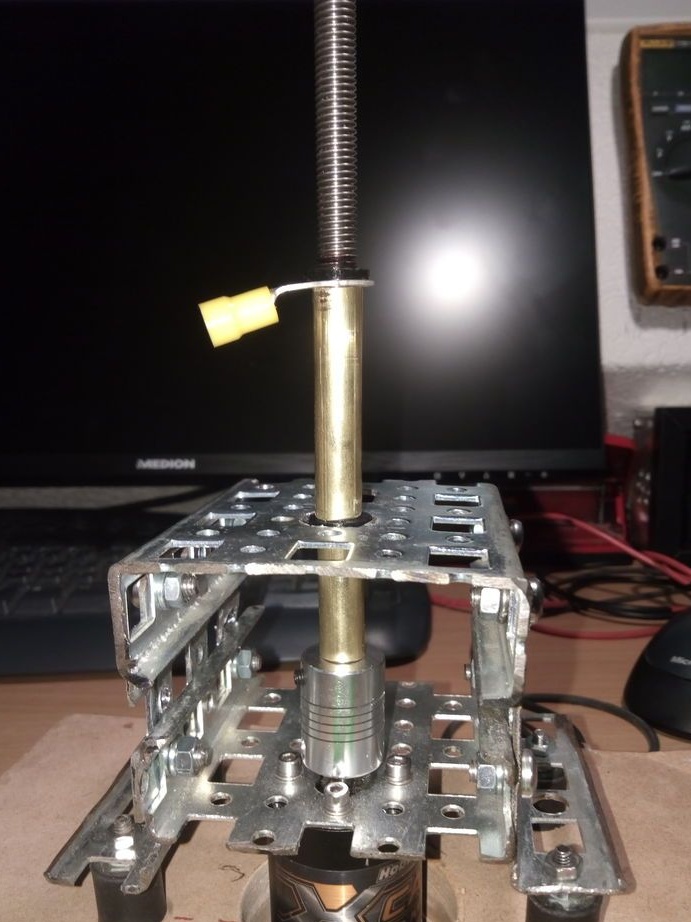
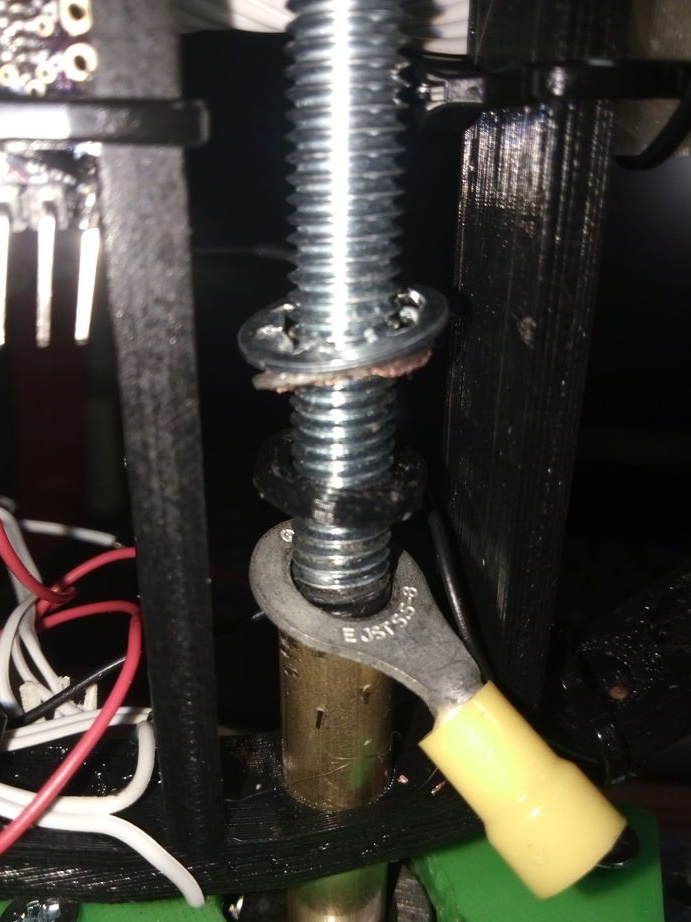
Stud panjang 250 mm digunakan untuk aci pemacu.Panjang bushing tembaga adalah 50 dan 30 mm. Bergantung pada saiz cincin dan panjang batang. Lengan atas dan lebih panjang mesti terpencil dari stud, kerana ia digunakan untuk membekalkan kuasa plus kepada LED. Untuk melakukan ini, bungkus pita elektrik pada gunting rambut atau gunakan haba mengecut, dua pencuci plastik juga diperlukan. Lengan itu perlu dibor ke 8.5-9mm jika tidak, ia tidak akan sesuai. Lengan yang lain bersama-sama dengan rod membentuk hubungan negatif.
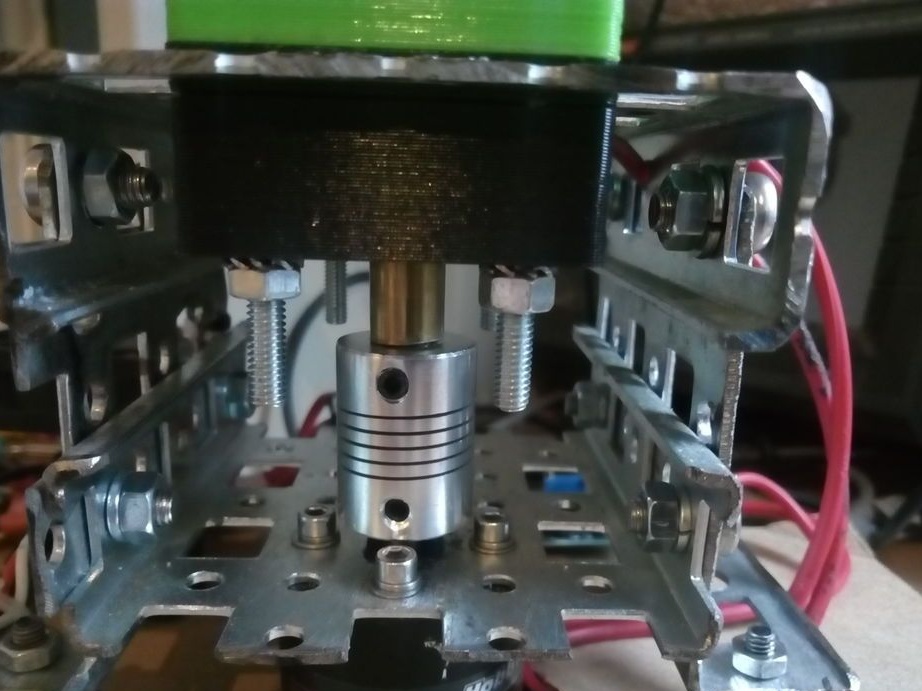
Kuasa tolak diletakkan di dalam alur khas dan ditekan terhadap galas dalam pendakap, yang boleh dicetak pada pencetak. Fail STL kurungan dalam arkib.


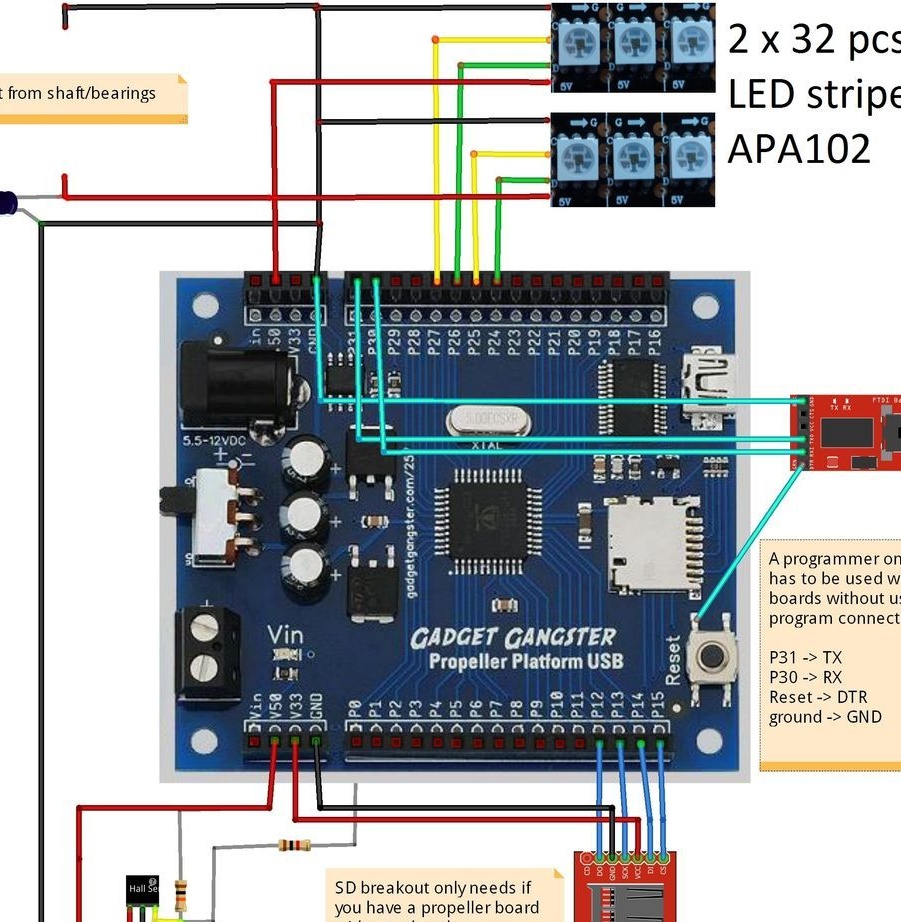
Sekarang anda perlu menyambung motor elektrik, seperti yang ditunjukkan dalam gambar rajah.
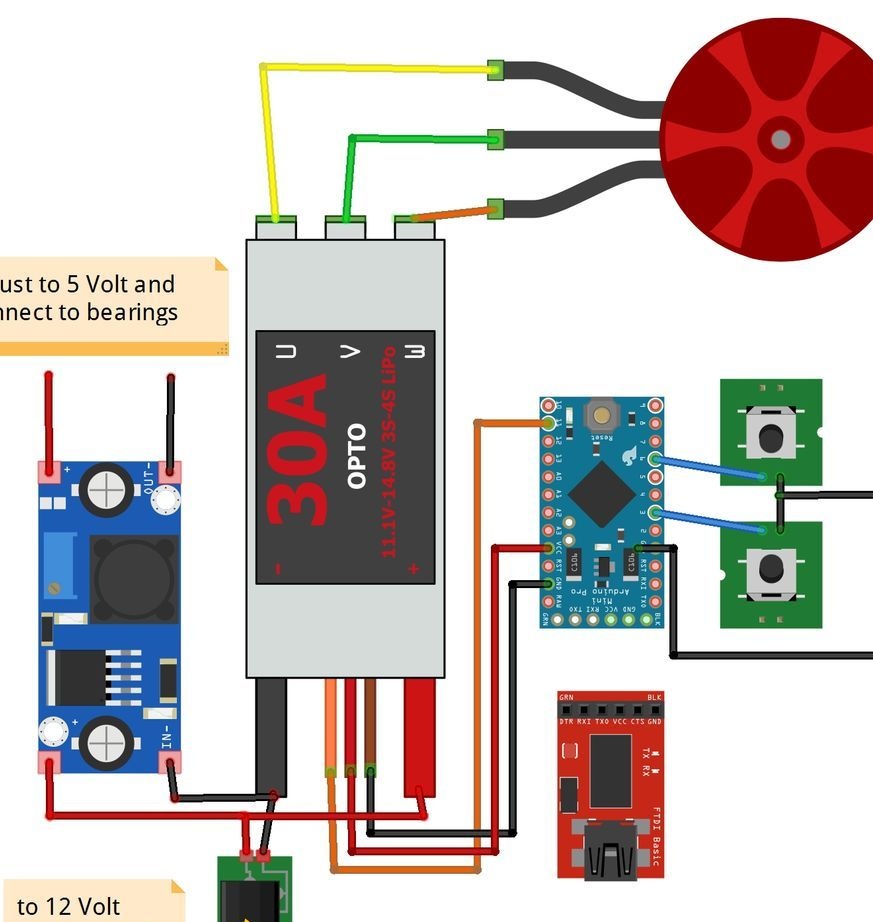
Dua butang pada rajah digunakan untuk menyesuaikan kelajuan. Apabila anda menghidupkan kuasa, ESC akan menerima nilai 500 μs. Tekan salah satu butang untuk menghidupkan enjin. Lakaran akan mengambil nilai "StartPos = 625". Kemudian, apabila anda menyesuaikan kelajuan, nilai ini boleh ditukar. Tekan butang selama dua saat dan enjin harus berhenti.
Perhimpunan struktur teras.
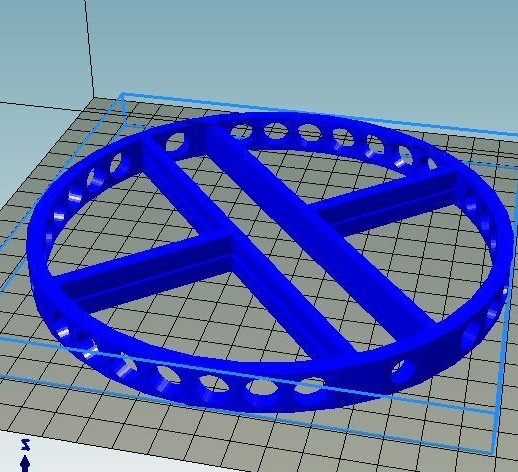

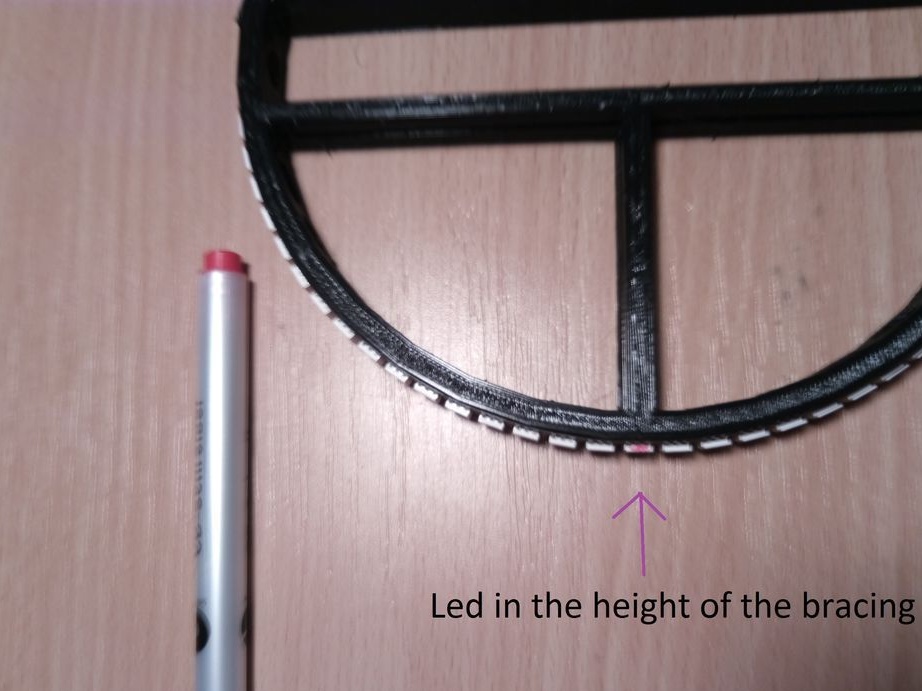
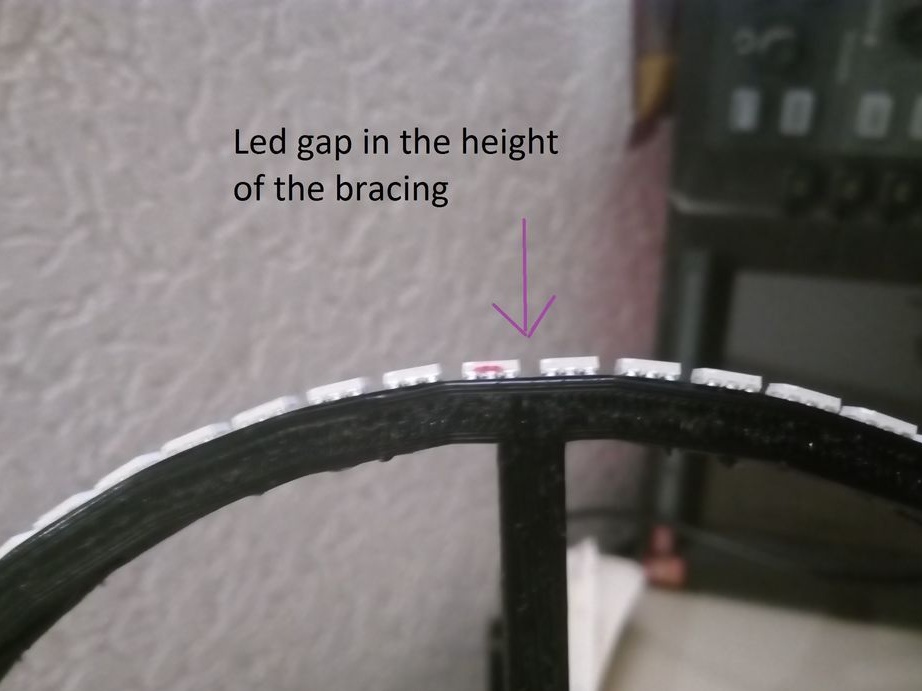


Untuk melakukan ini, cetak cincin itu sendiri dari fail yang dilampirkan. Penulis membuat banyak lubang di dalamnya untuk mengurangkan berat badan. Anda boleh menggunakan sekeping paip PVC. Dua jalur 32 LED dipotong. Dua jalur LED membentuk garis yang ganjil dan ganjil. Susun pita supaya LED satu jalur berada di antara LED yang lain, tetapi di bahagian belakang. Selepas anda mengikat pita, anda boleh menyambungkan LED papan pengawal. Dan kemudian anda perlu mengimbangi keseluruhan perhimpunan.
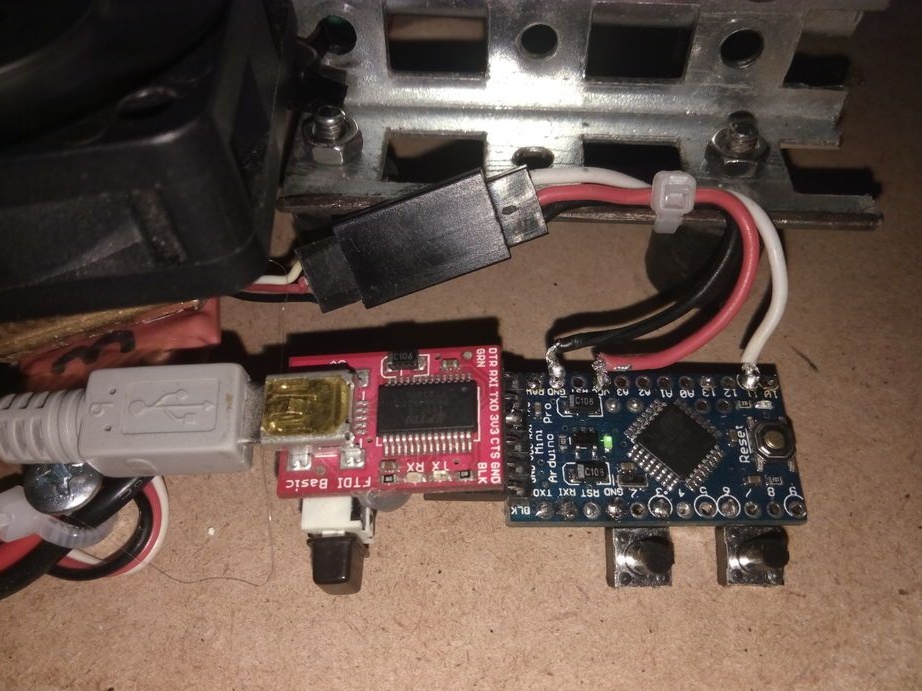
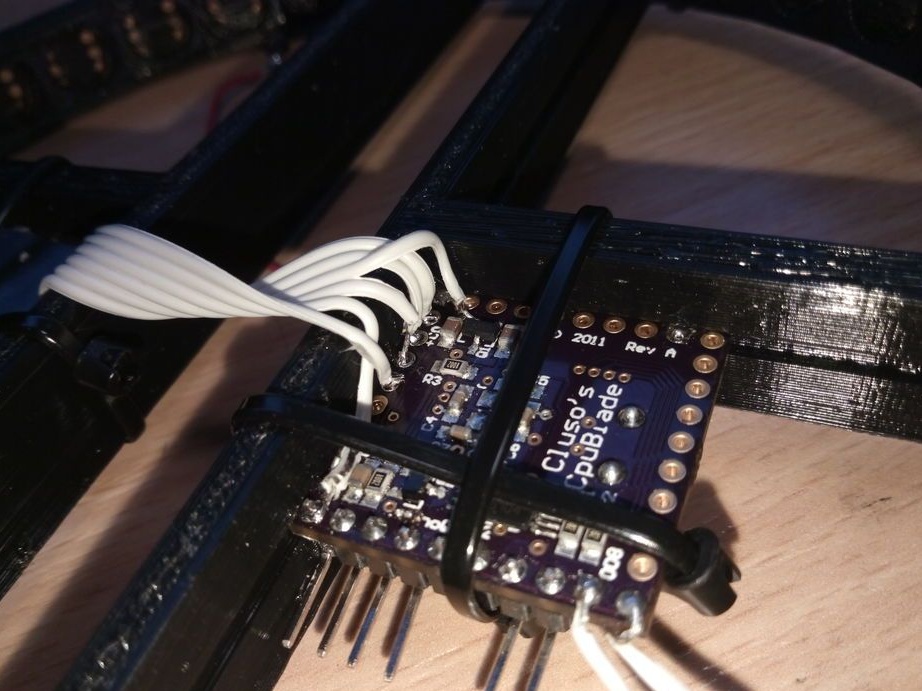
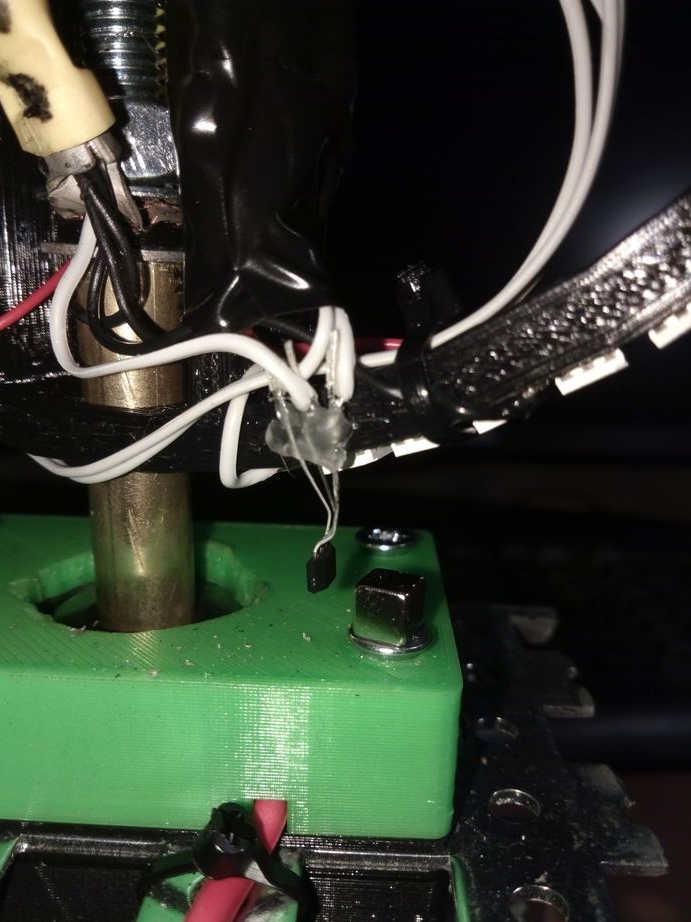
Gambar berikut menunjukkan cara menyambungkan semua komponen peranti tersebut bersama-sama. Foto juga menunjukkan sensor dewan dipasang dengan magnet.
Untuk program Microcontroller Propeller Parallax yang anda perlukan
JANGAN sambungkan peralatan anda ke port USB atau siri sehingga anda memasang perisian tersebut. Lebih banyak maklumat tentang memuat naik firmware ke Parallax boleh didapati
Penulis menggunakan lebih tua dan, dengan itu, kurang ekonomis, dari segi penggunaan tenaga, papan MCU kerana dia tidak dapat mencari perpustakaan baru di papan pengawal baru.
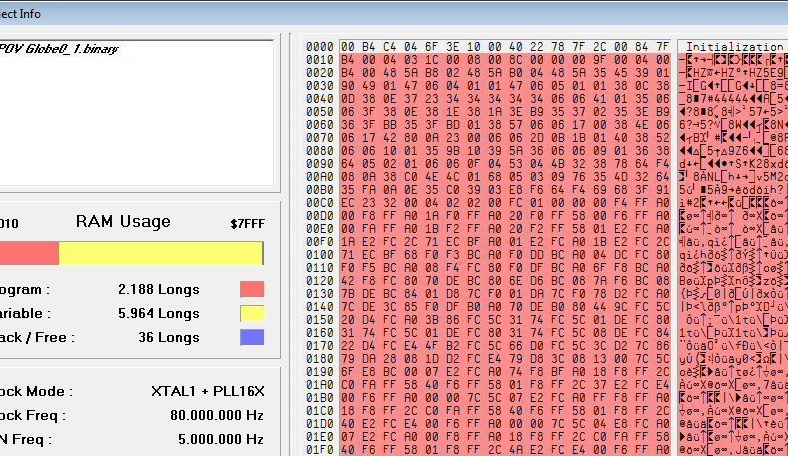
Selepas anda mengumpul dan menyambung segala-galanya, anda perlu memprogramkan pengawal. Penulis melakukan ini dengan bantuan. Fail dengan firmware dalam arkib.
Sekarang anda boleh cuba memulakan peranti ini. Dari awal, salin gambar ujian ke kad SD dan tampalkannya ke dalam slot.
• Jika anda memutarkan cincin dengan tangan, LED hendaklah berkelip setiap kali sensor dewan melewati magnet
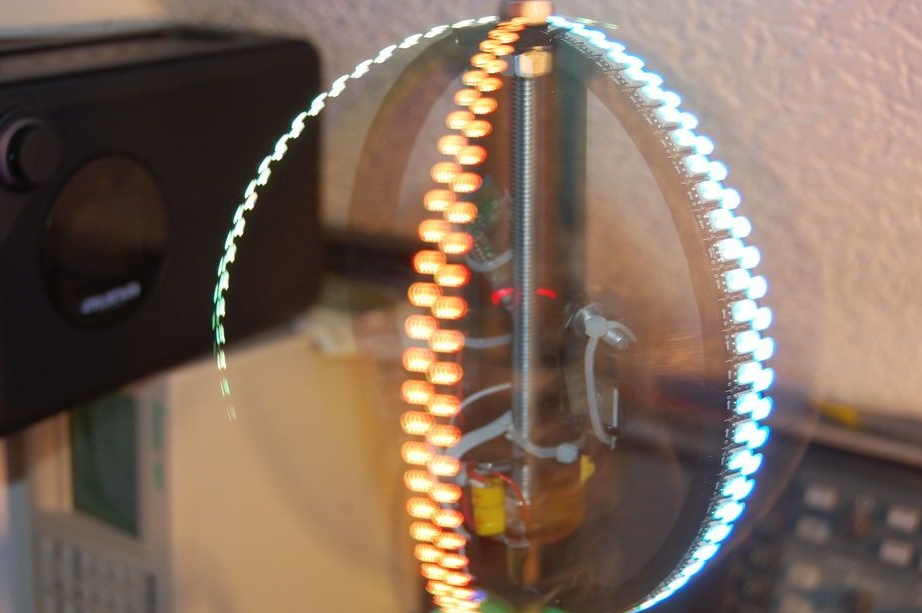
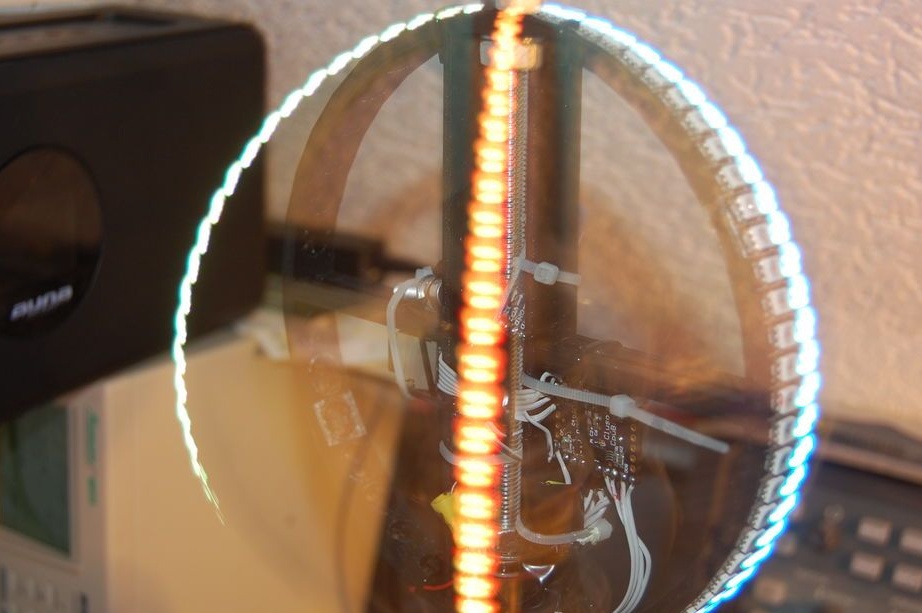
• Hidupkan enjin. Meningkatkan kelajuan dengan butang, perlu memastikan bahawa LED menyala seperti yang ditunjukkan dalam 2 gambar
• Sambungkan terminal Arduino ke pengawal motor.
• Ingat nilai yang dipaparkan.
• Hentikan enjin
• Tulis nilai yang disimpan sebelum ini kepada pembolehubah "startPos"lakaran POV_MotorControl
• Program Arduino sekali lagi.
Pada masa akan datang motor anda akan bermula pada kelajuan yang betul. Kini anda boleh "Isi" pada peta mana-mana imej. Untuk melakukan ini, anda perlu mengubah saiz imej dengan 120x64 piksel, putar gambar berlawanan arah lawan dengan 90 darjah, dan cermin secara menegak. Kurangkan kecerahan imej, kerana LED sangat terang. Untuk melakukan ini, lebih baik menggunakan pembetulan gamma dengan pekali 0.45.
Simpan imej sebagai BPM 24 bit tanpa mampatan. Selepas semua manipulasi, fail output akan menjadi saiz 23094 bait.



