
Halo kepada semua pencinta elektronik. Dalam artikel ini saya akan memberitahu anda bagaimana untuk membuat robot enjin carian yang bergerak di sepanjang garis hitam, yang boleh anda lukapkan seperti yang anda suka. Saya yakin kit kit ini akan menjadi mainan yang sangat menarik bagi mereka yang akan mengumpulnya.
Saya tidak akan menarik untuk masa yang lama, kita akan terus ke pembuatan.
Sebelum membaca artikel itu, saya mencadangkan untuk menonton video dengan pemproses pemasangan terperinci bagi kit kit ini, serta pemeriksaan prestasi.
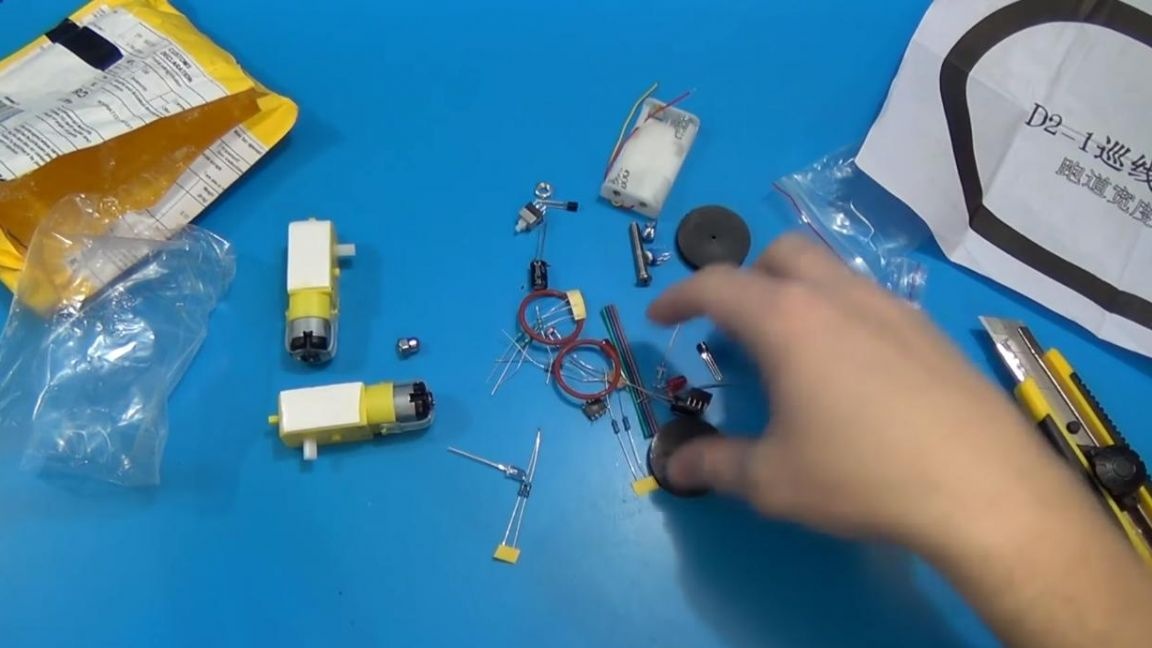
Untuk membuat robot enjin carian yang akan bergerak di sepanjang garis hitam lakukan sendiri, anda perlu:
* Kit
* Pematerian besi, solder, fluks
* Pemotong sampingan
* Multimeter
* Perlawanan untuk pematerian "tangan ketiga"
* Tang
* Pemutar skru Phillips
Langkah pertama.
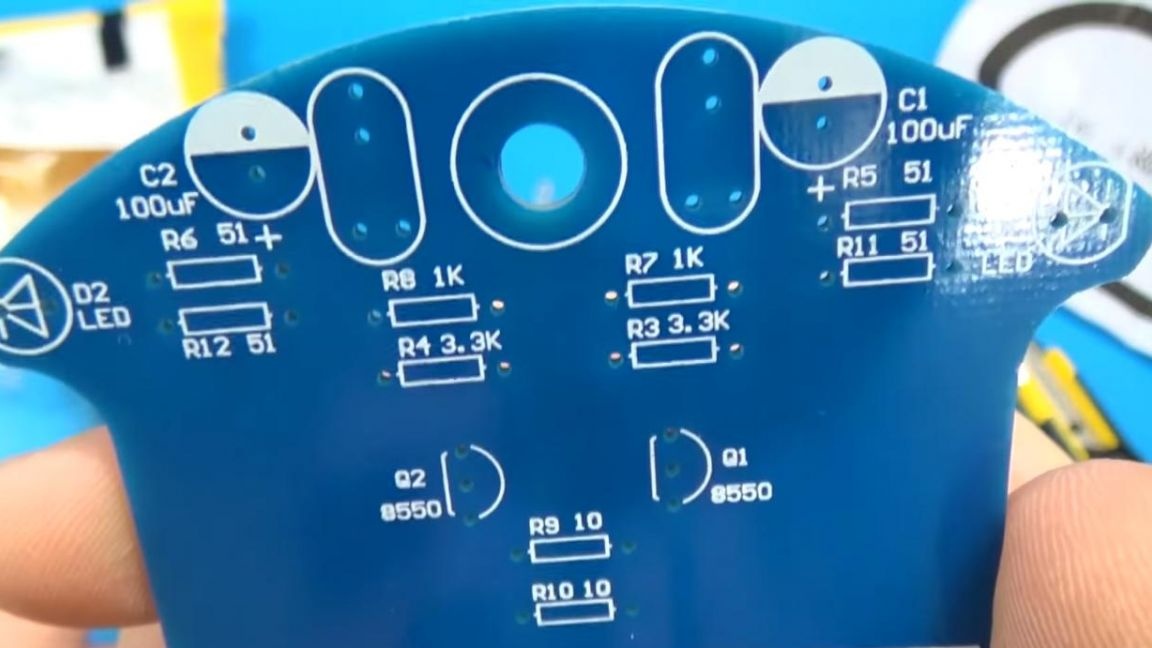
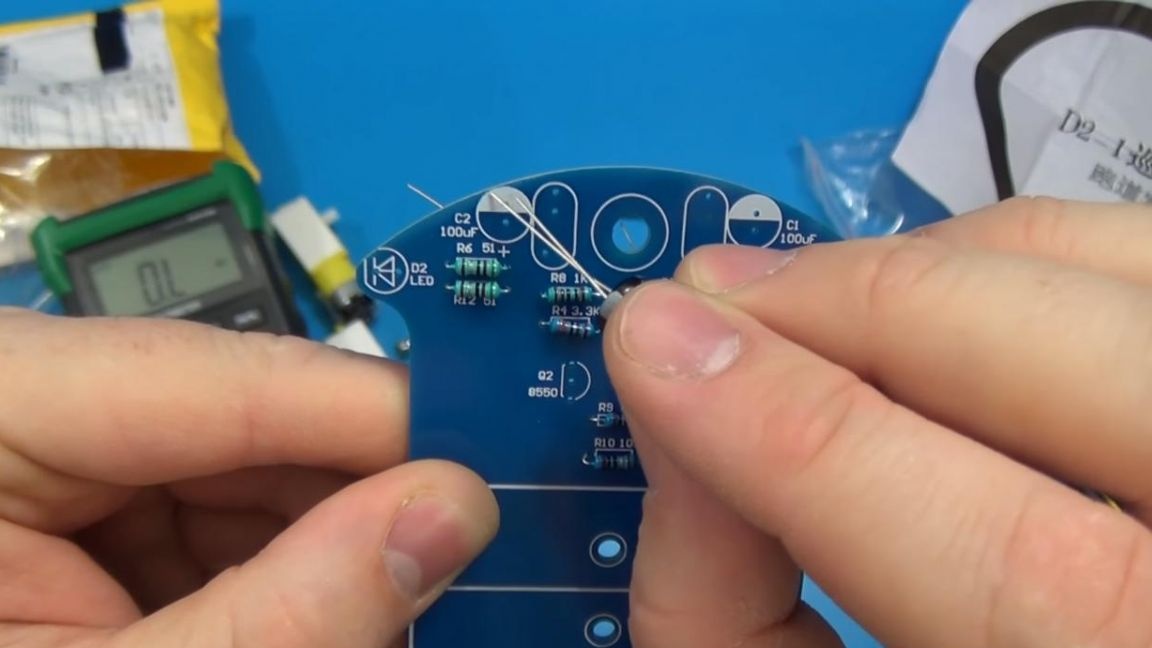
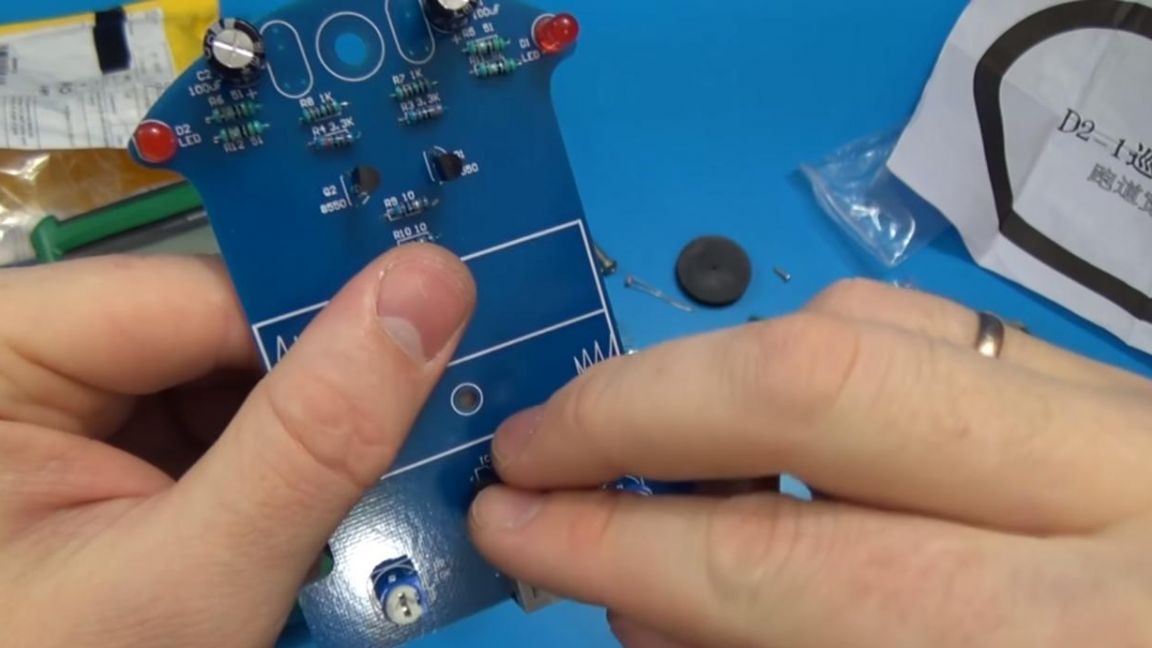
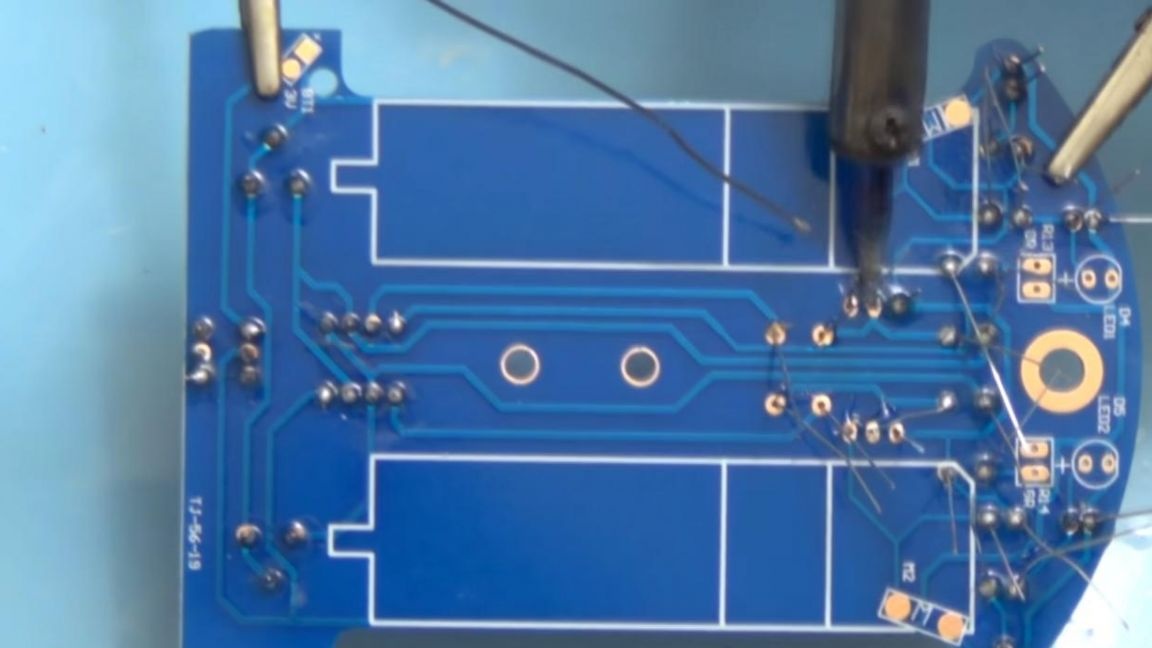
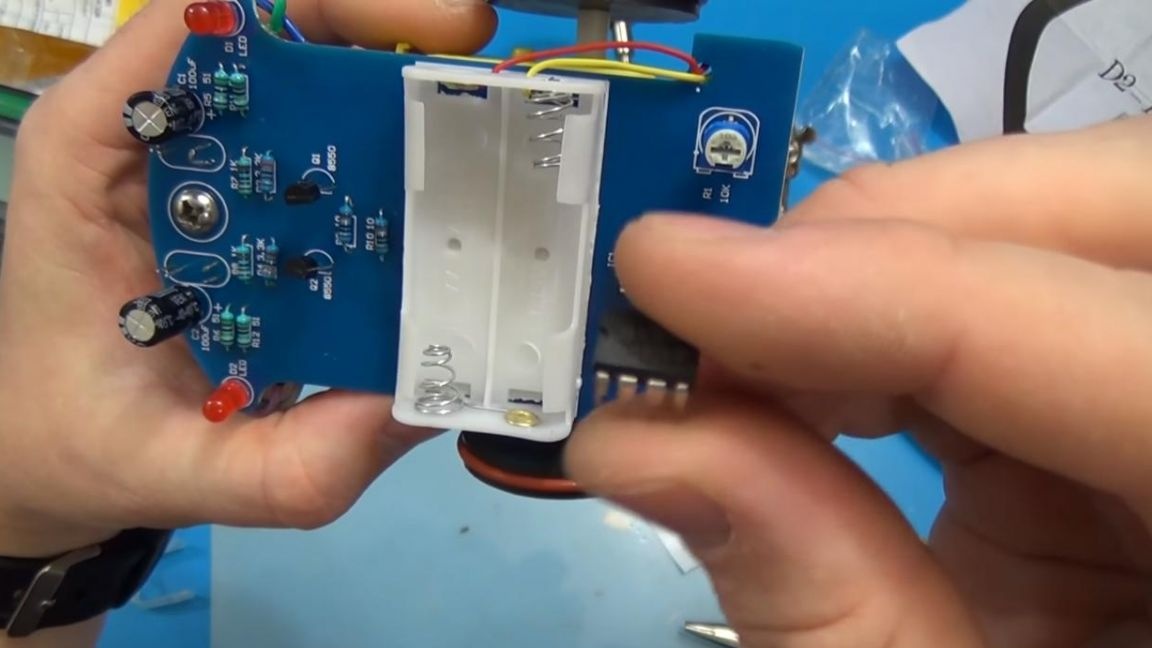
Pertama sekali, anda perlu meletakkan semua komponen di papan, kit termasuk kedua-dua perintang, kapasitor, dan transistor.
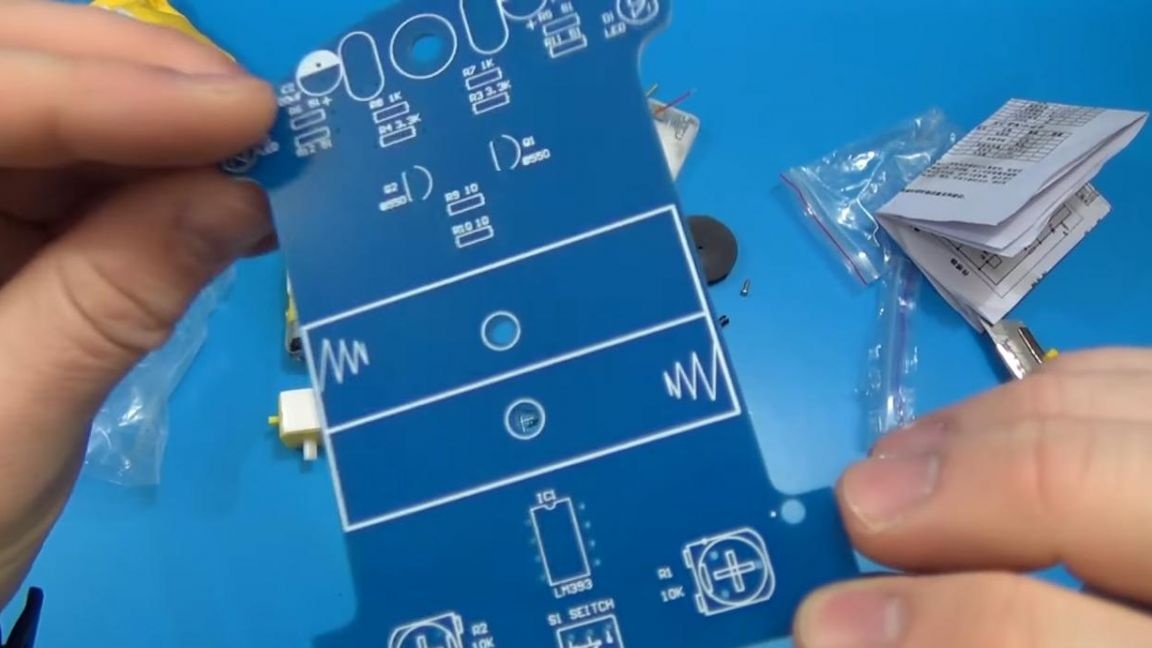
Mula-mula anda perlu memasang resistor di tempat mereka, nilai nominal yang ditunjukkan di papan, sementara resistor itu sendiri adalah kod warna, di mana anda boleh menentukan rintangan perintang tunggal. Juga, rintangan boleh diukur dengan multimeter, kaedah ini akan lebih cepat, tetapi ini tidak bermakna ia adalah suatu keharusan. Kami mengaturkan perintang di atas papan mengikut nilai nominal mereka, sedikit membengkokkan terminal di belakang, ini dilakukan supaya mereka tidak terjatuh ketika menyolder.

Langkah Dua
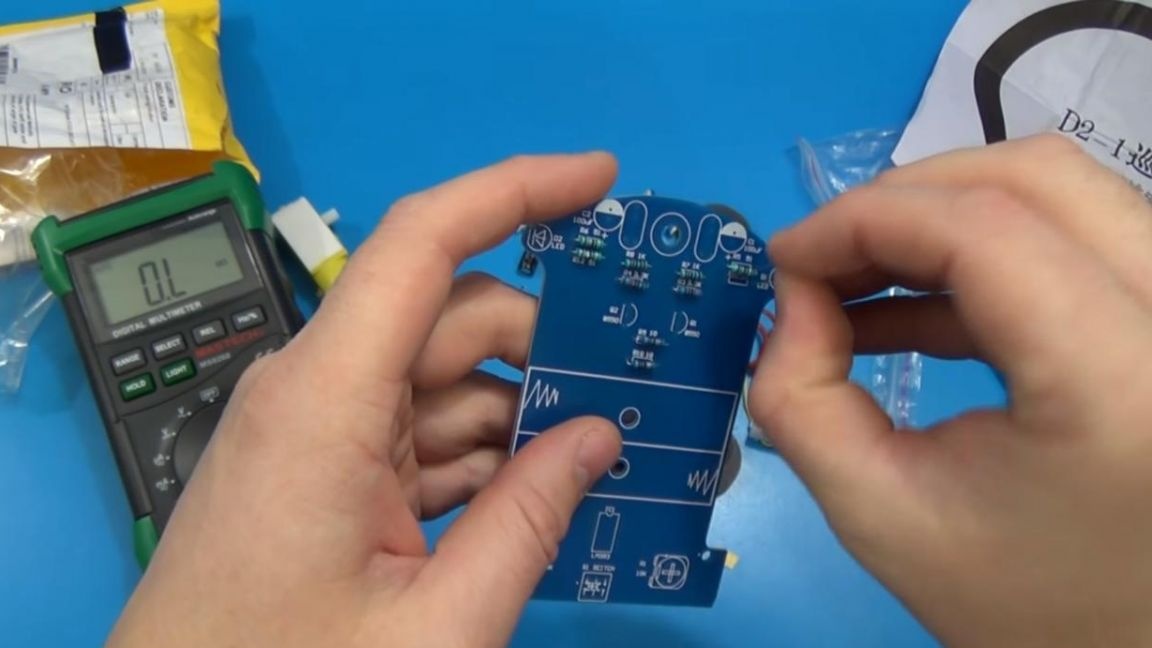
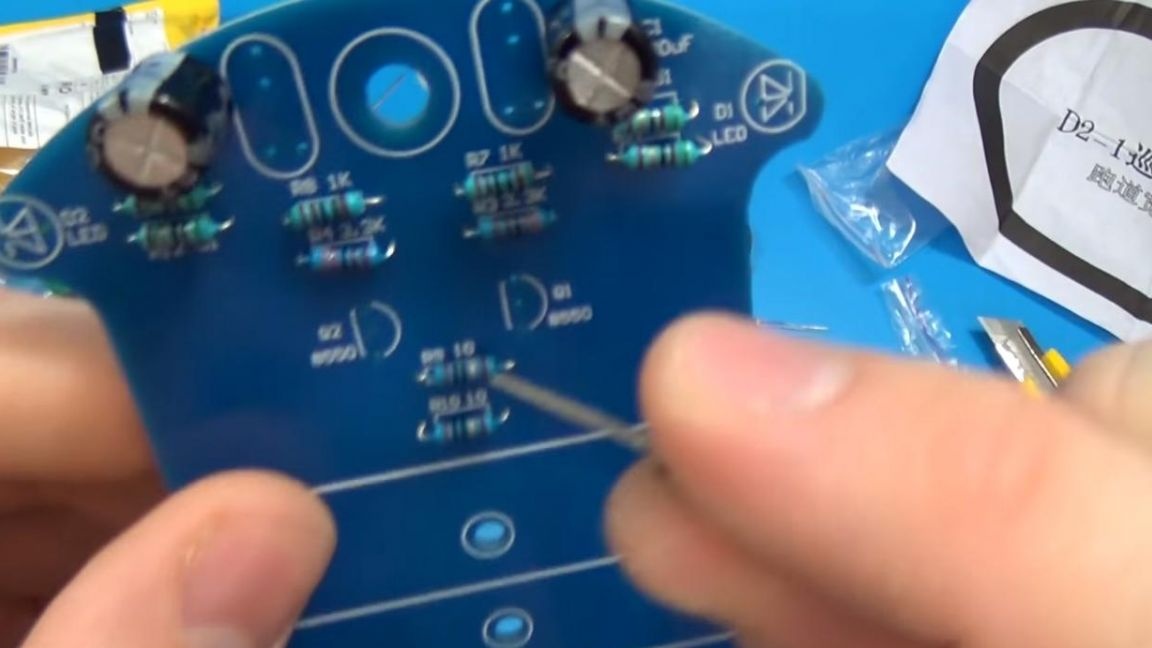
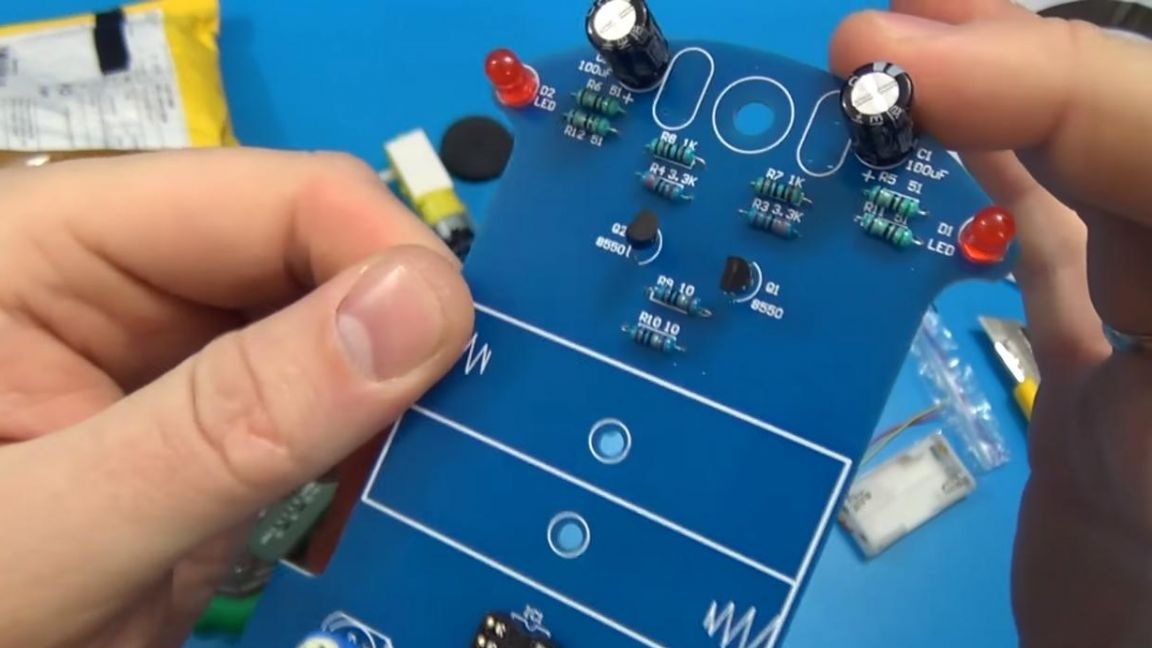
Resistor adalah semua di tempat, diikuti oleh kapasitor, tidak seperti komponen sebelumnya, ini mempunyai polaritas. The minus kapasitor ditunjukkan pada kesnya dengan jalur putih dengan dasbor, di papan, tolak ditunjukkan oleh separuh bulatan putih diisi.
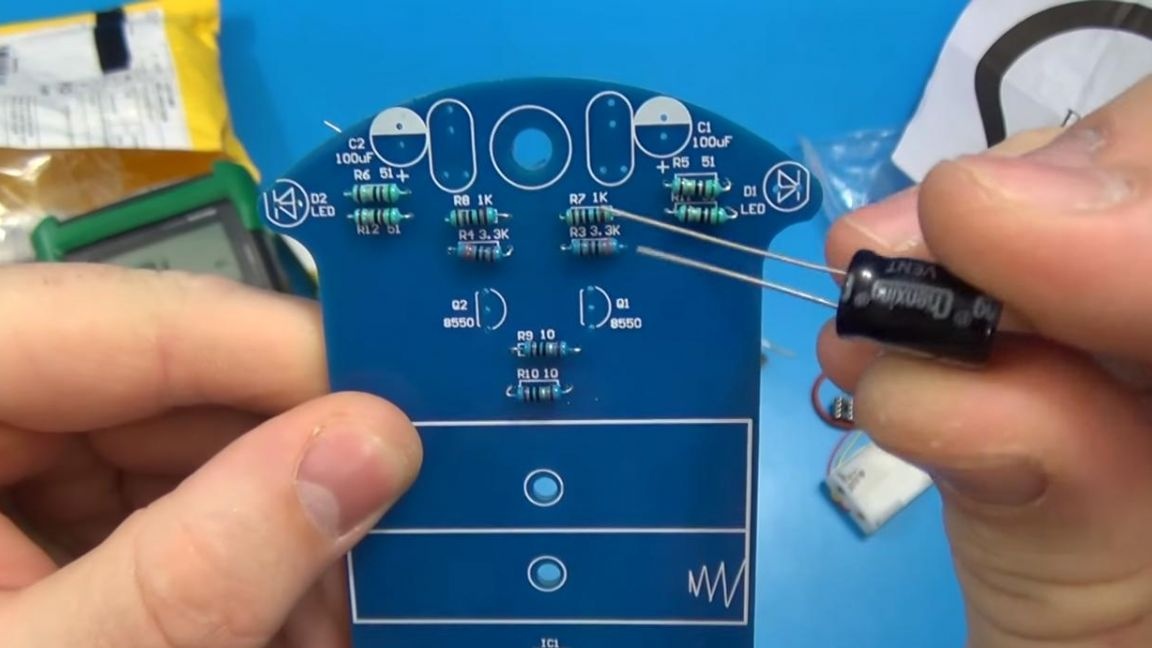
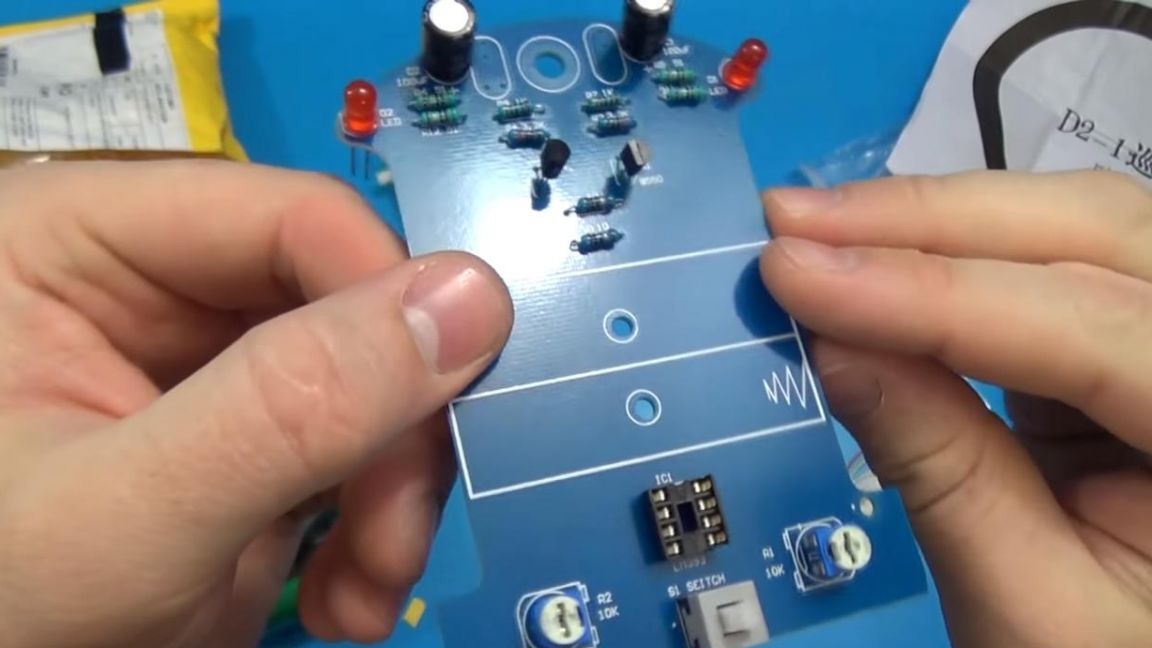
Apabila kapasitor berada di tempat mereka, kita berpaling kepada transistor, mereka adalah sama untuk kita, jadi kita tidak boleh bercampur dengan satu sama lain. Untuk meletakkan kedudukan mereka di papan yang betul, anda perlu menggabungkan bahagian rata transistor dengan sengkang di papan.
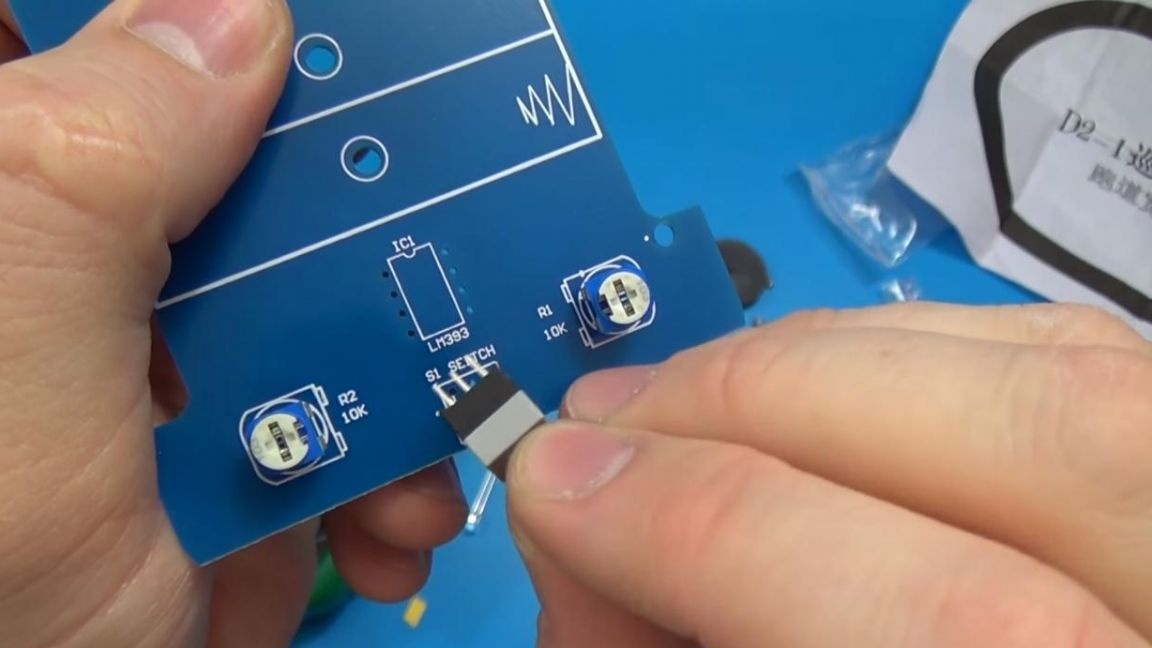
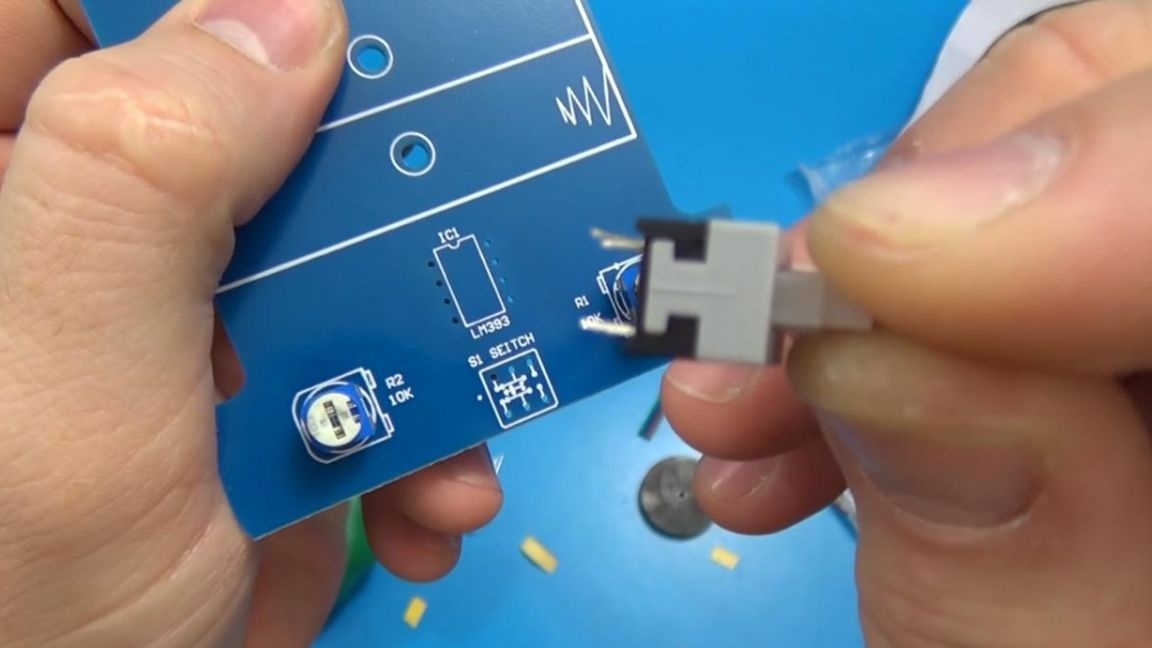
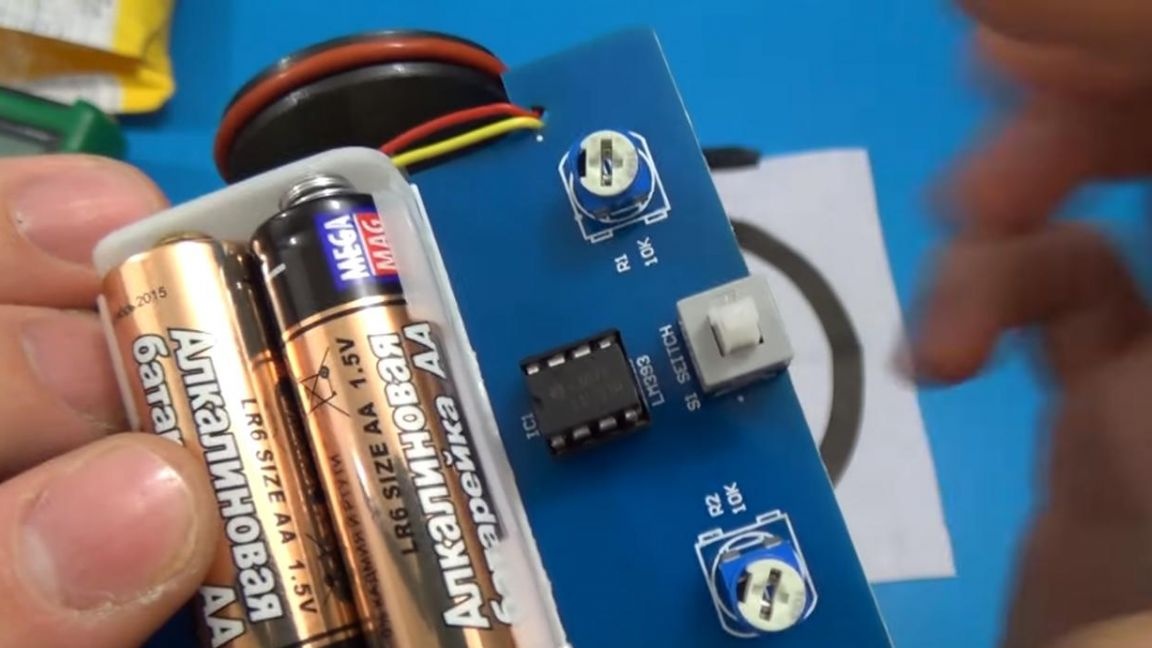
Kemudian kami memasang dua perantara penalaan, berkaitan dengan lokasi terminal yang tidak akan berfungsi untuk meletakkannya secara salah, yang baik. Kami juga meletakkan butang kuasa, ia berada di tempat, iaitu, ia boleh berada di posisi di atas atau di luar, lokasi yang betul sepadan dengan kebetulan kedudukan jalur pada butang itu sendiri dengan titik pada papan.
Langkah Tiga
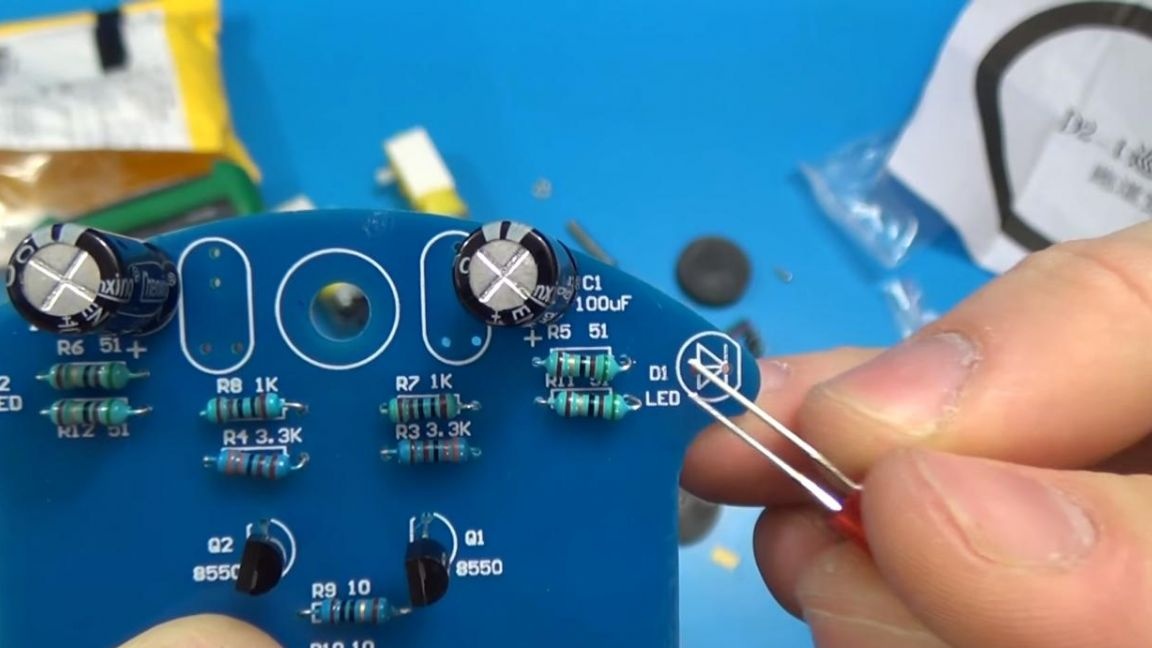
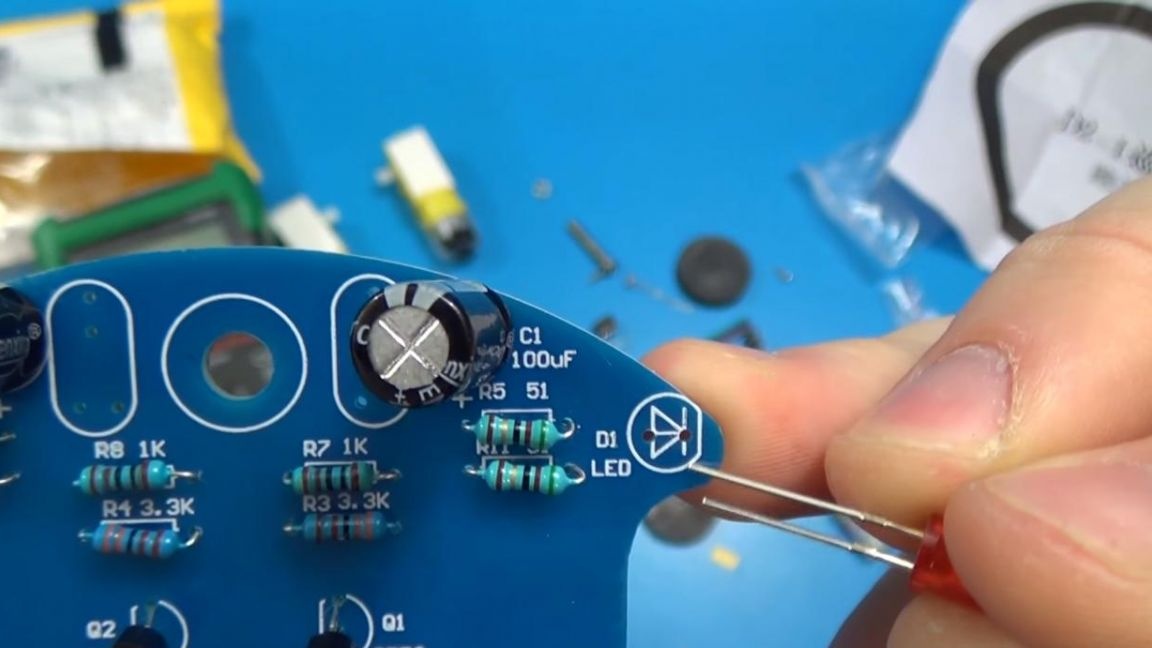
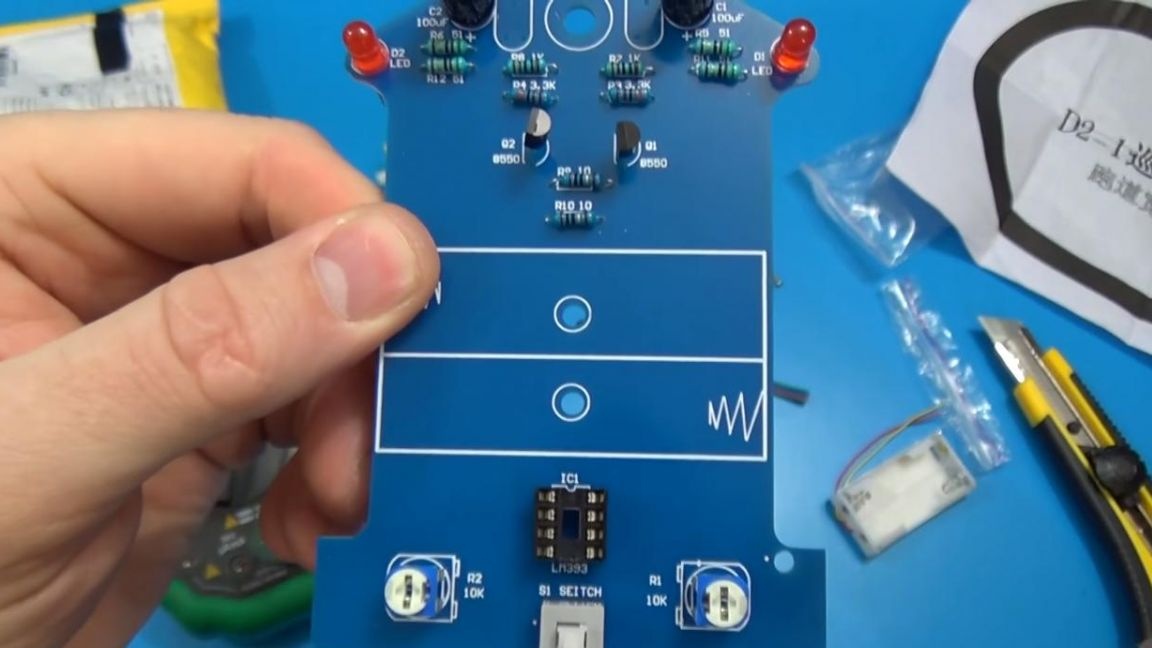
Masa untuk berurusan dengan LED, terdapat empat daripada mereka dalam kit, dua merah dan dua putih. Di papan, tambahnya ditunjukkan oleh segitiga, pada LED ia adalah output yang panjang, dengan segala-galanya adalah jelas. Kami meletakkan LED merah di atas, mereka adalah analog "isyarat".Terdapat tempat yang berasingan untuk microcircuit, kita memasukkan penyambung di sana, jadi menggantikannya di mana akan menjadi lebih mudah, tetapi kenalan tidak akan terlalu panas ketika pematerian.

Langkah Empat
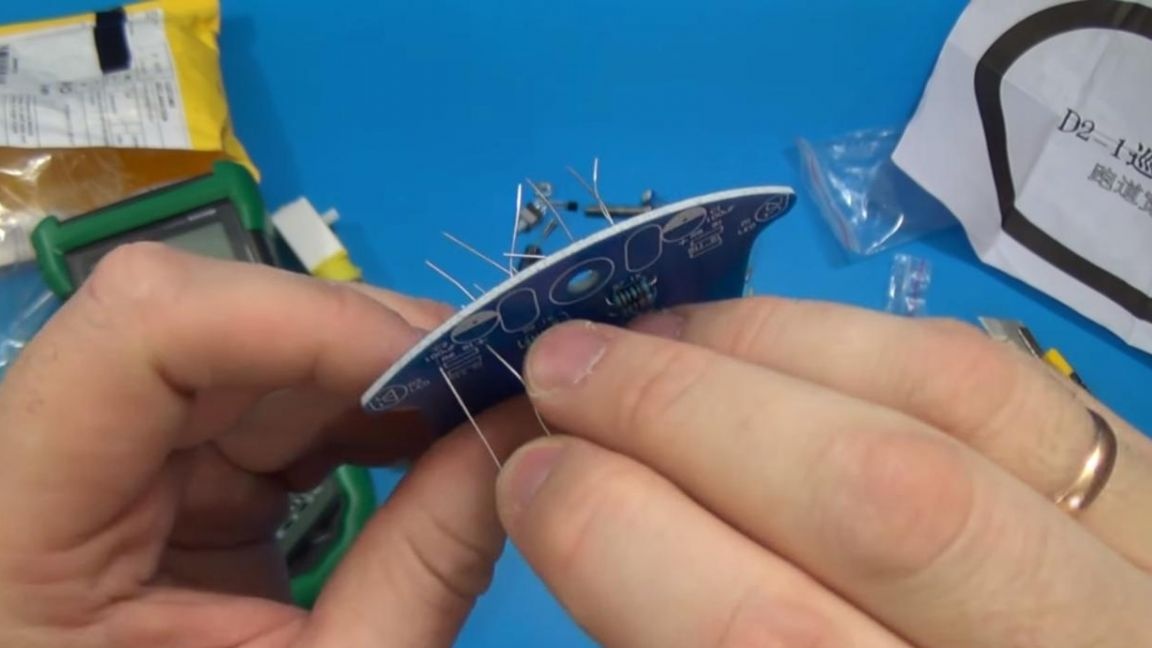
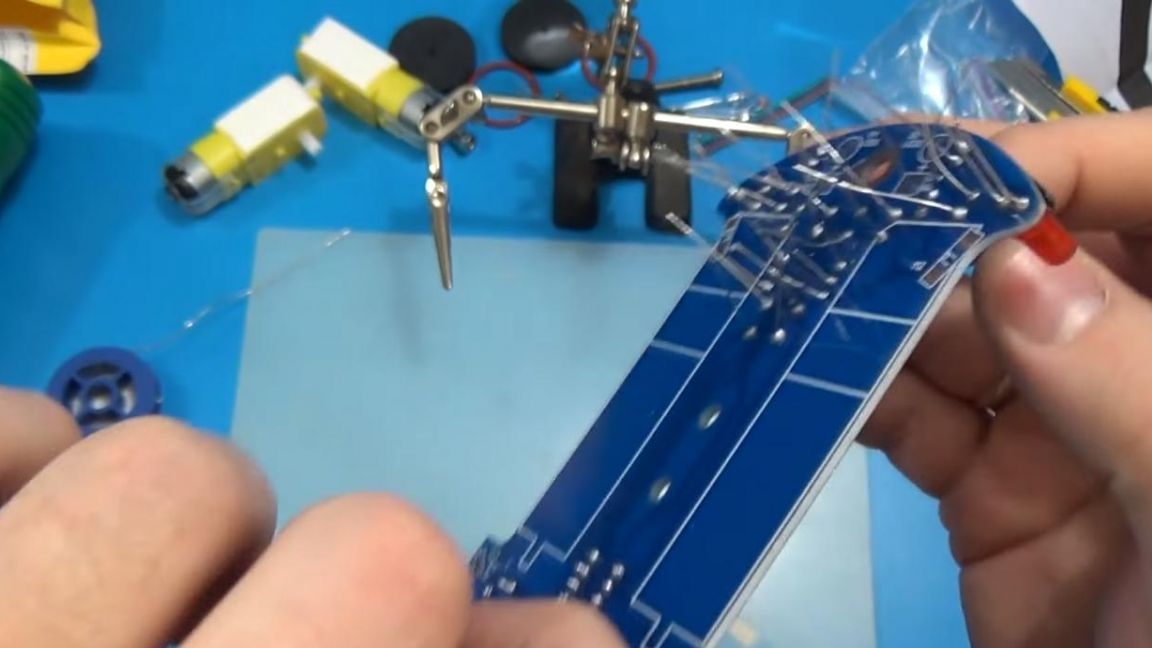
Sudah waktunya untuk menyolder komponen-komponen yang diletakkan di atas papan, membaikinya ke peranti pematerian ketiga, guna fluks dan solder, sedikit makan pateri.
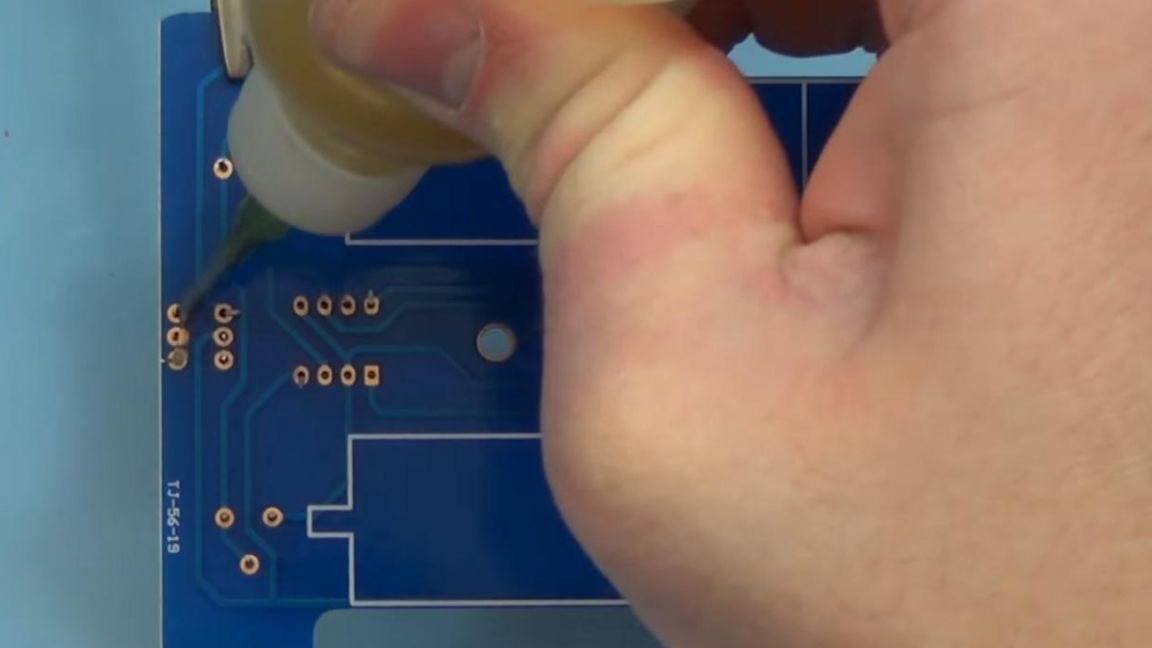
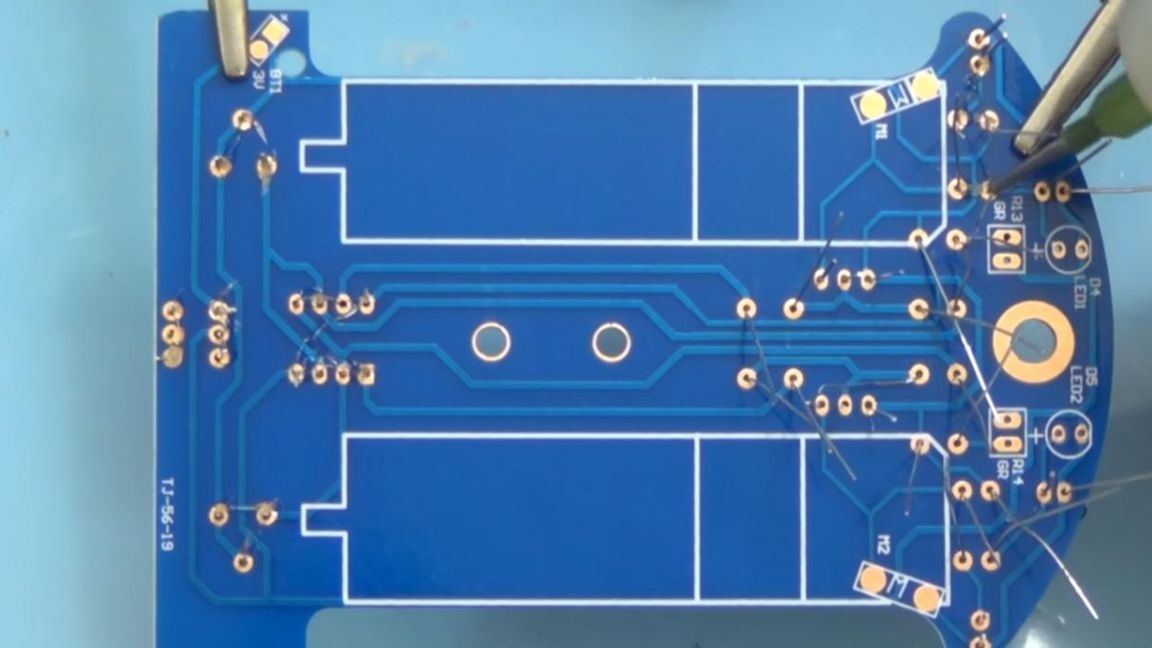
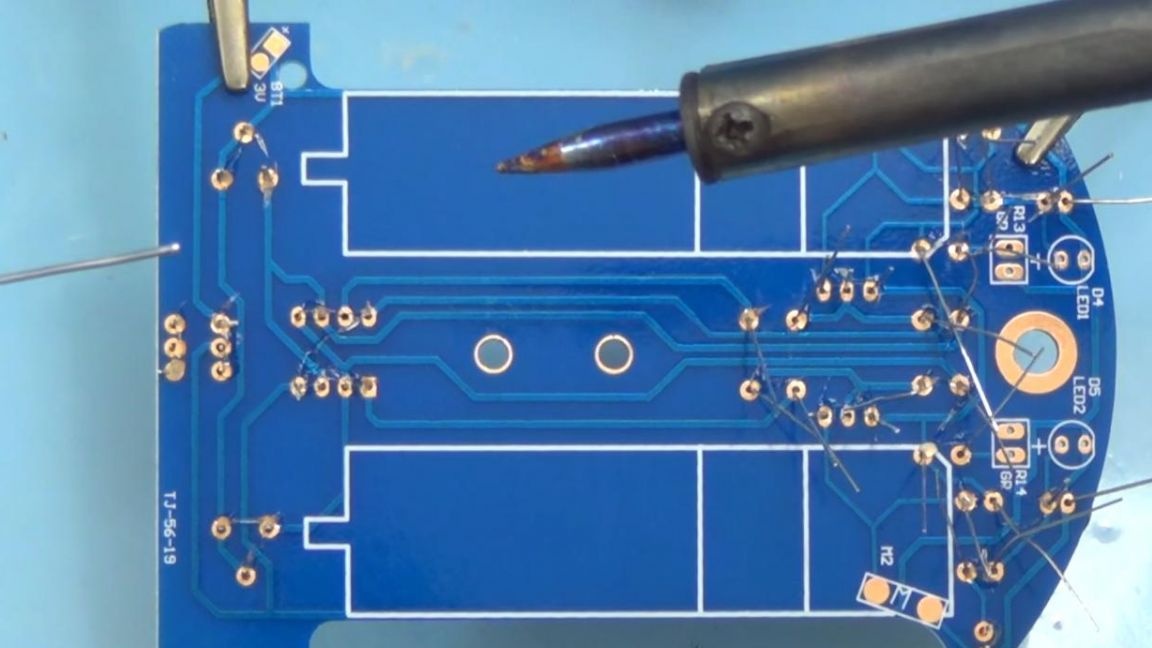
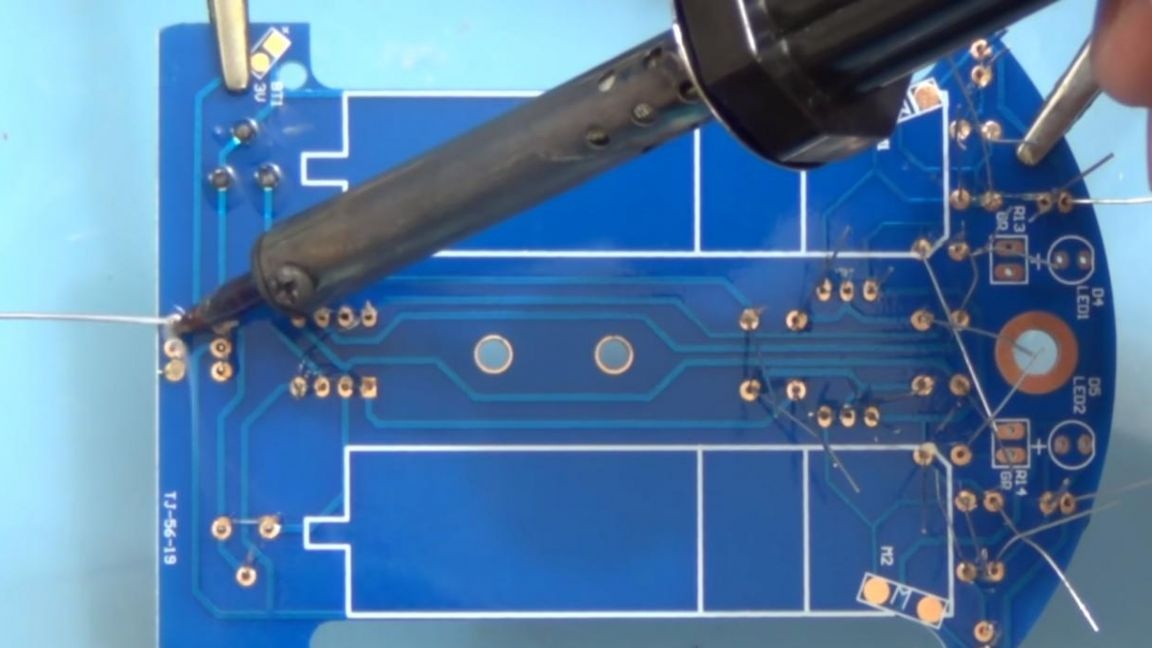
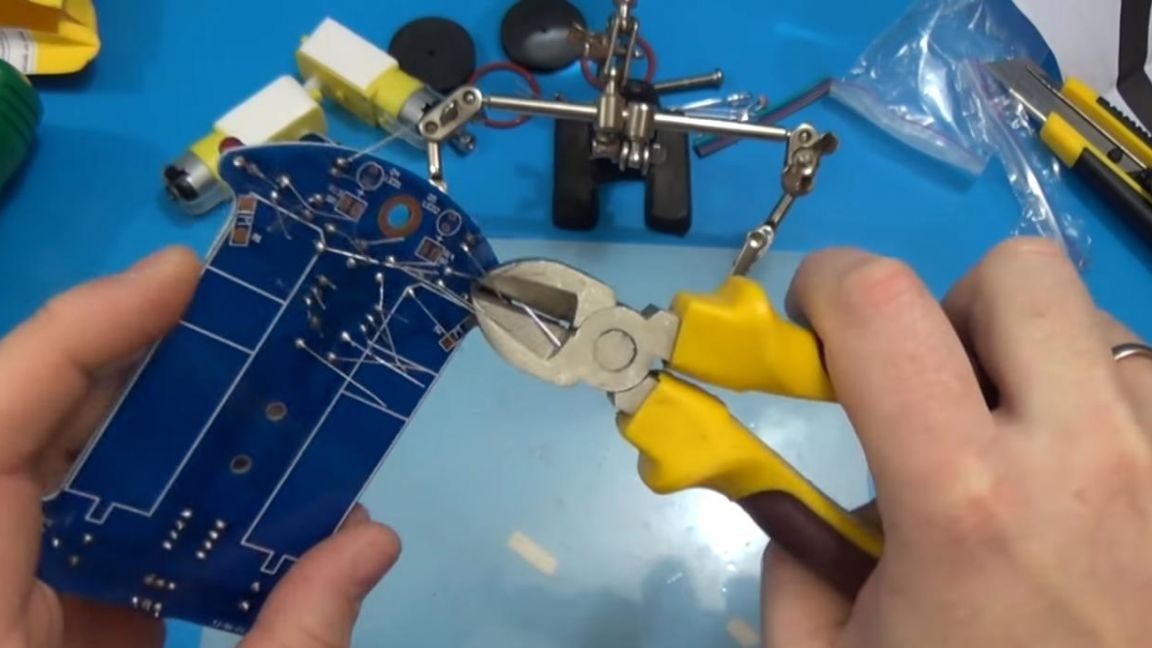
Selepas pematerian, kami mengeluarkan sisa-sisa kesimpulan dengan bantuan pemotong sisi, tetapi berhati-hati dengan ini, kerana merobek pad kenalan, serta trek sendiri, paling mudah pada tahap ini.
Langkah Lima
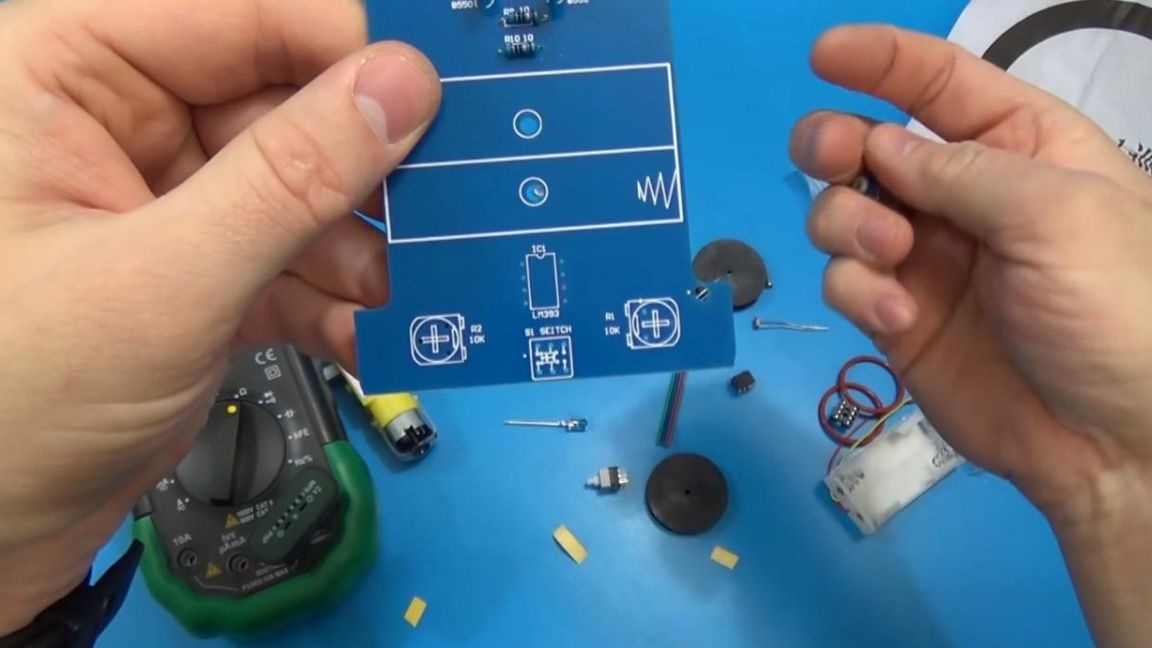
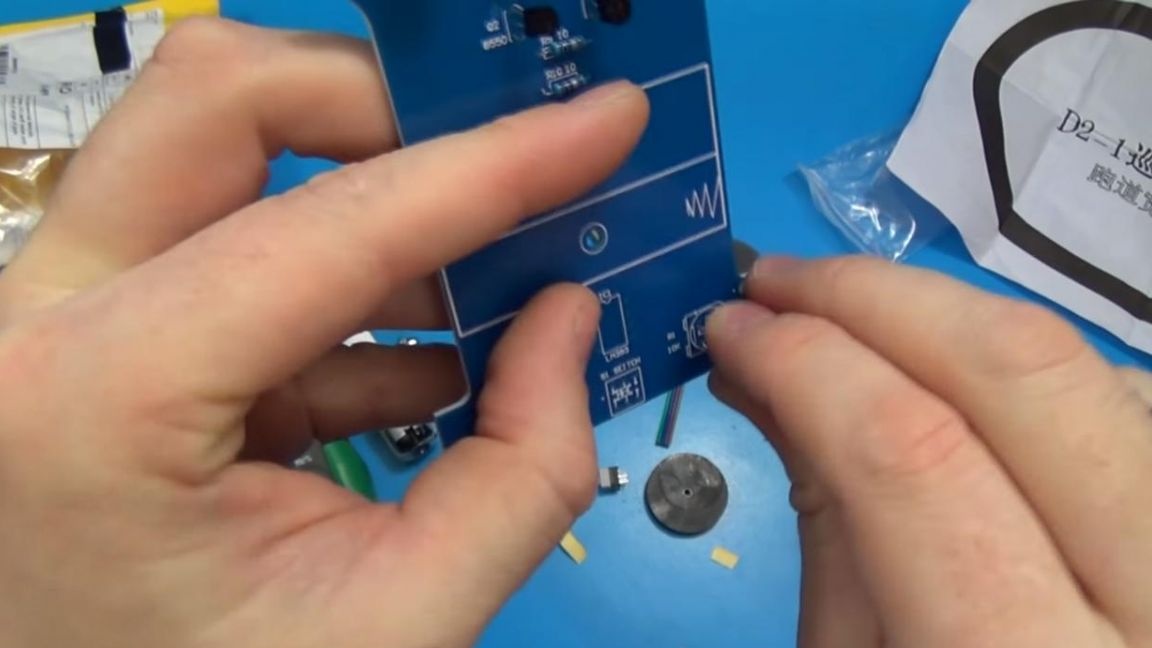
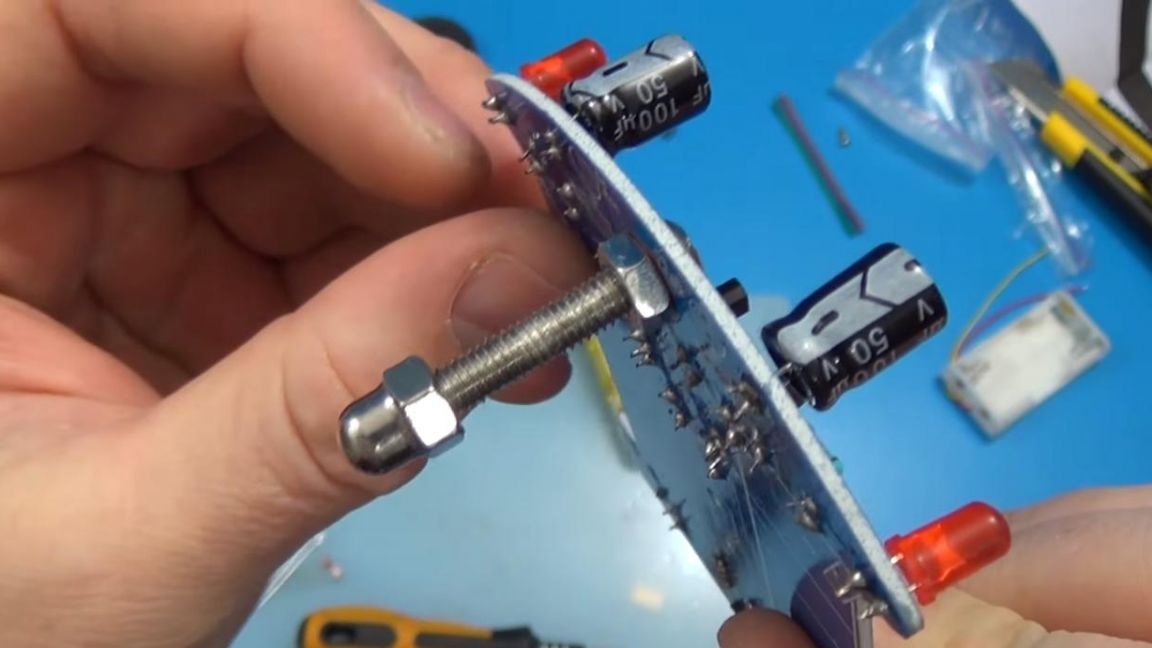
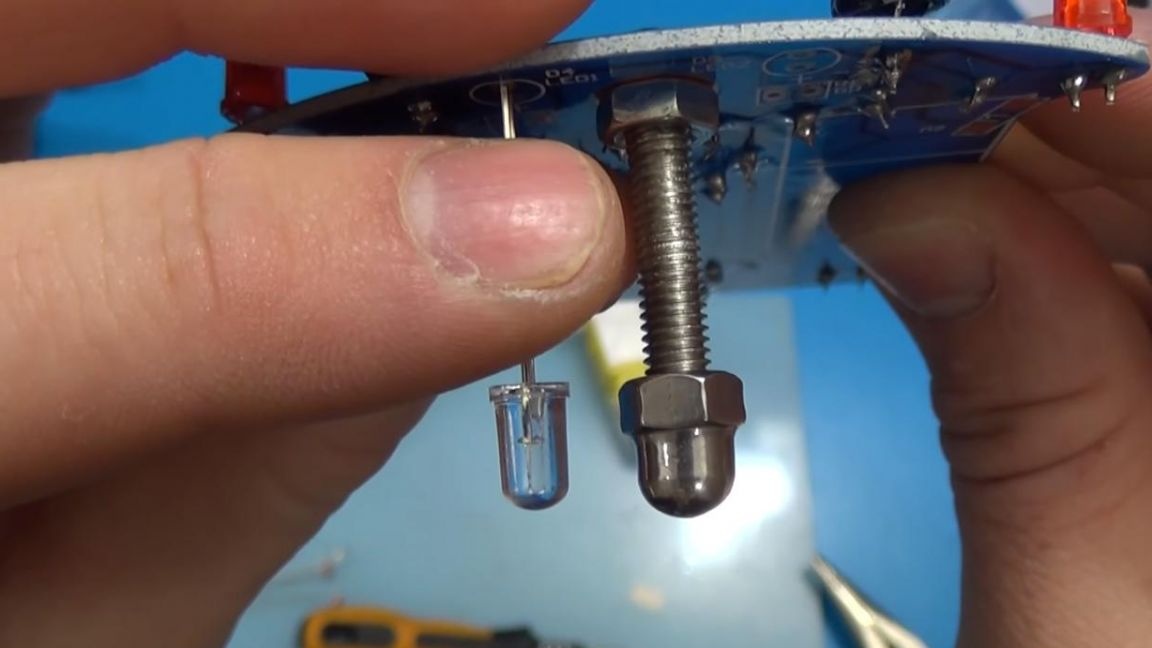
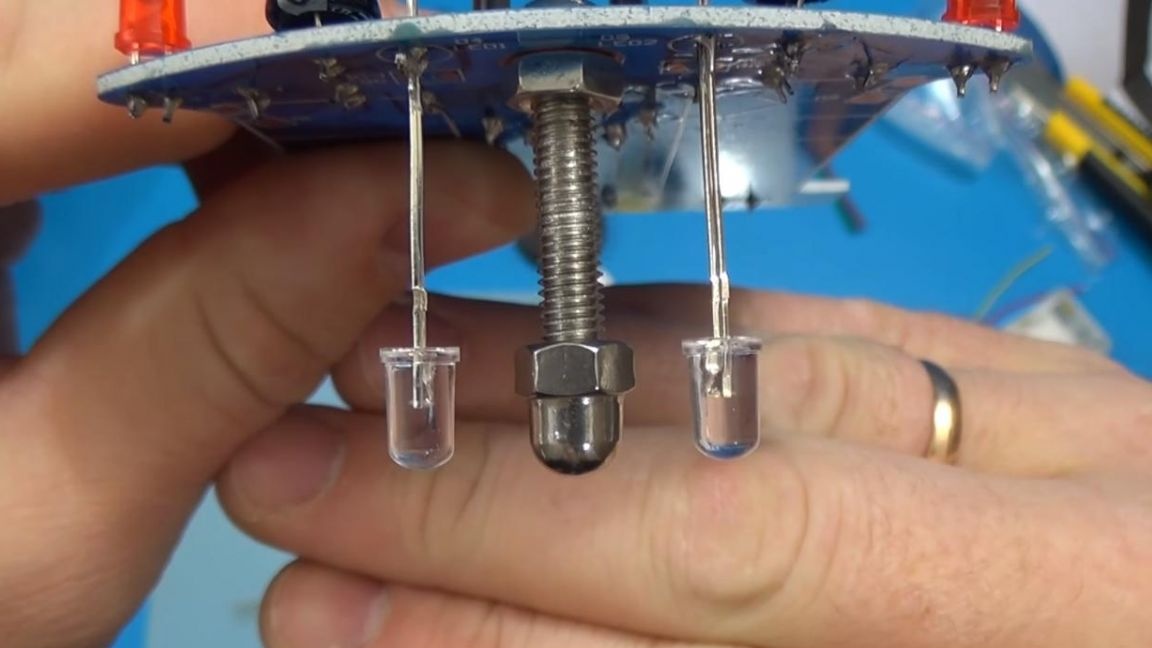
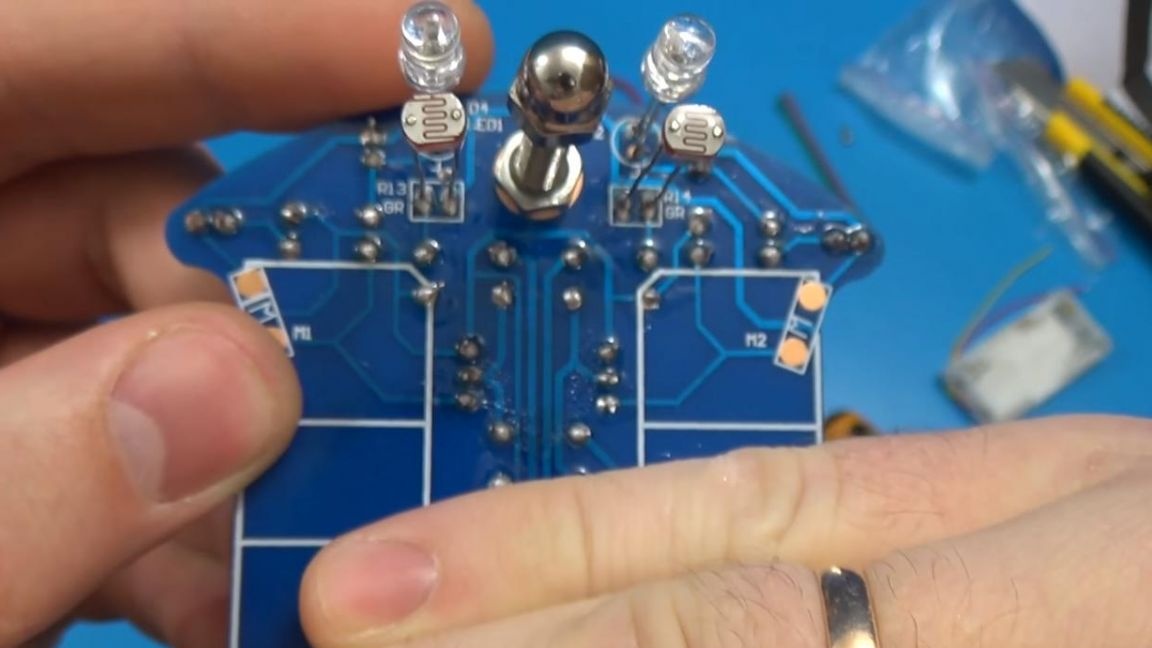
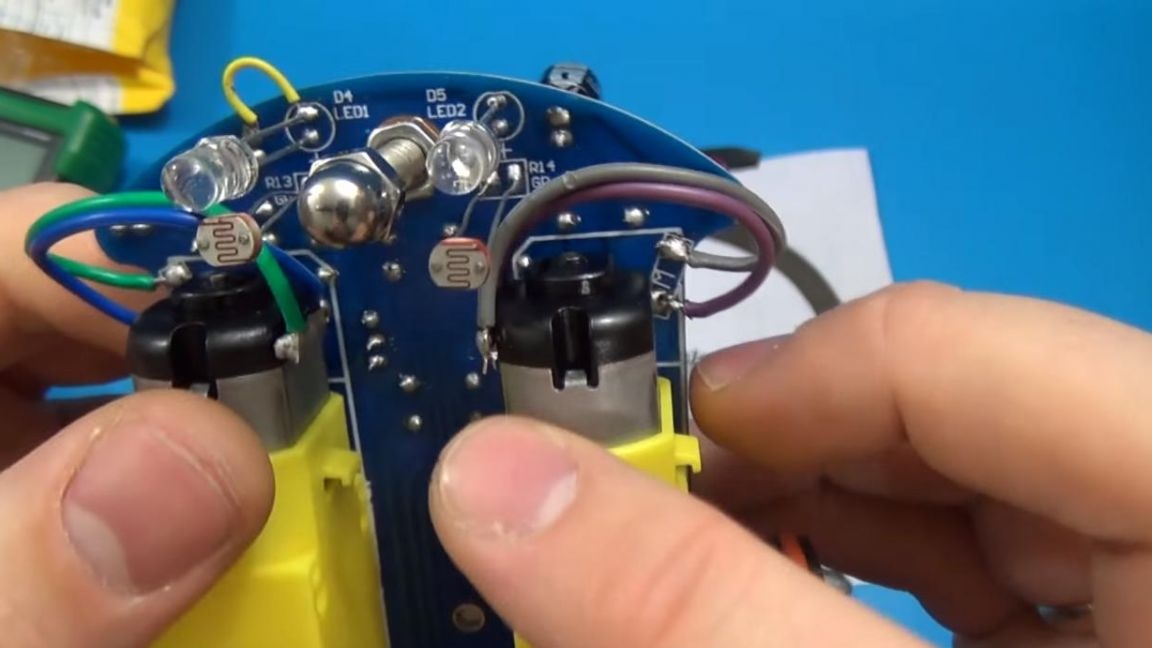
Sekarang kencangkan skru ke papan dan pasang LED putih di sebelahnya, jaraknya harus 1-2 mm kurang daripada sambungan skru, ini boleh dilihat dengan jelas dalam foto, jika ini tidak diperhatikan, maka photoresistors akan bekerja lebih buruk atau tidak berfungsi sama sekali .

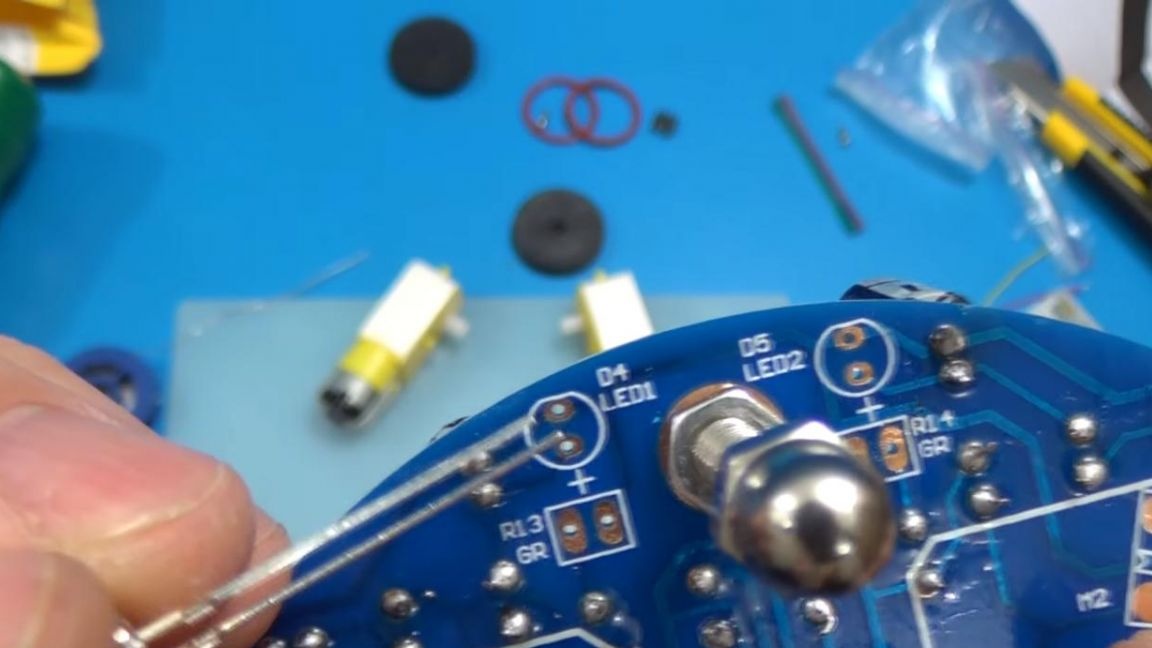
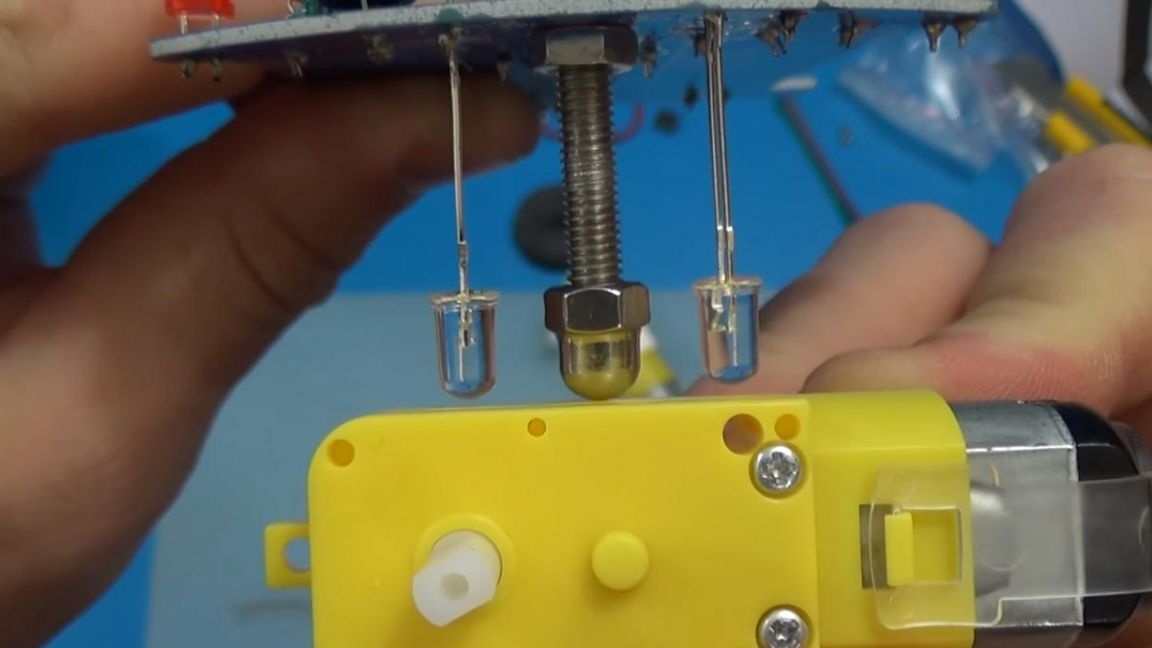
Di sebelah papan, kami menyolder photoresistor pada jarak yang sama dengan LED.

Langkah Enam
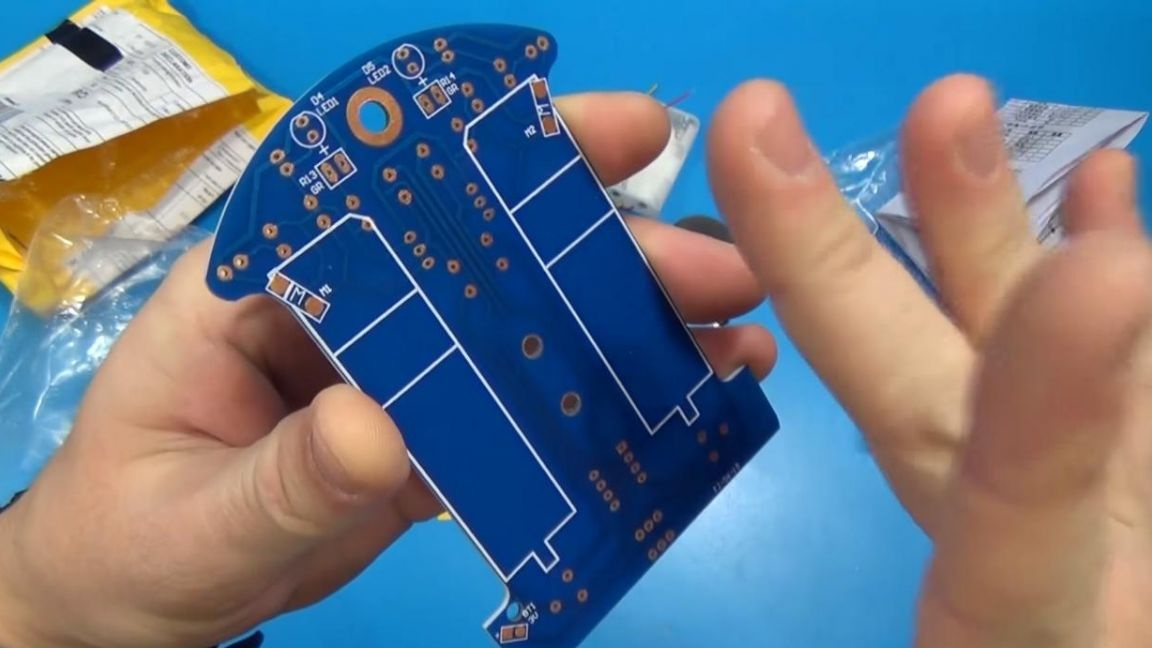
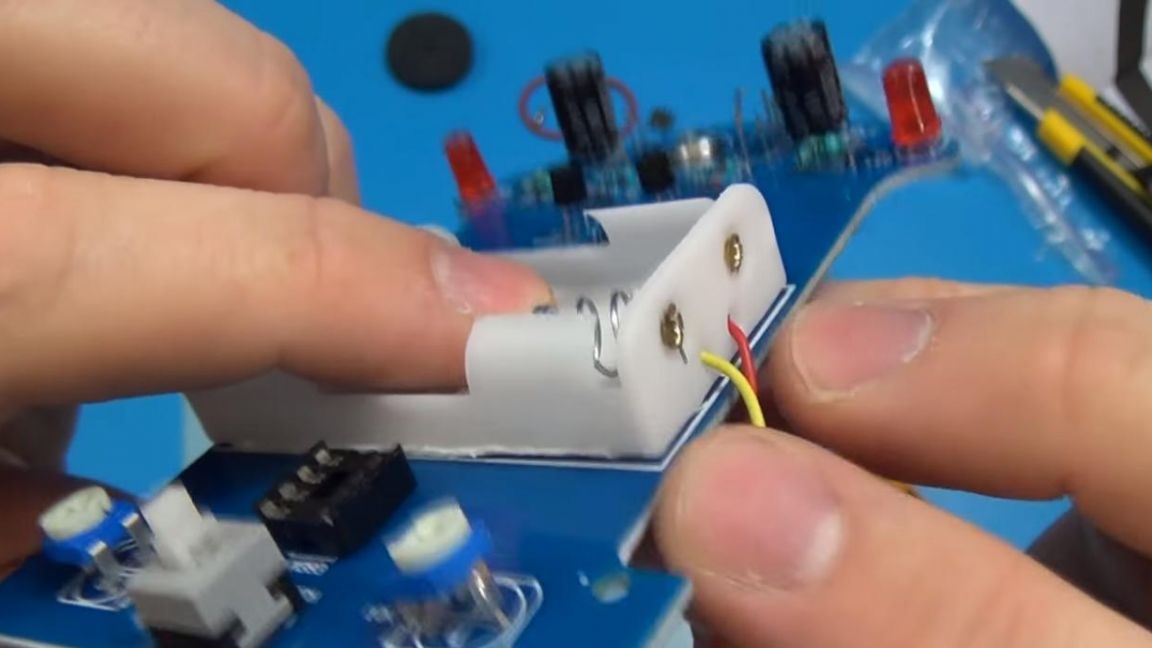
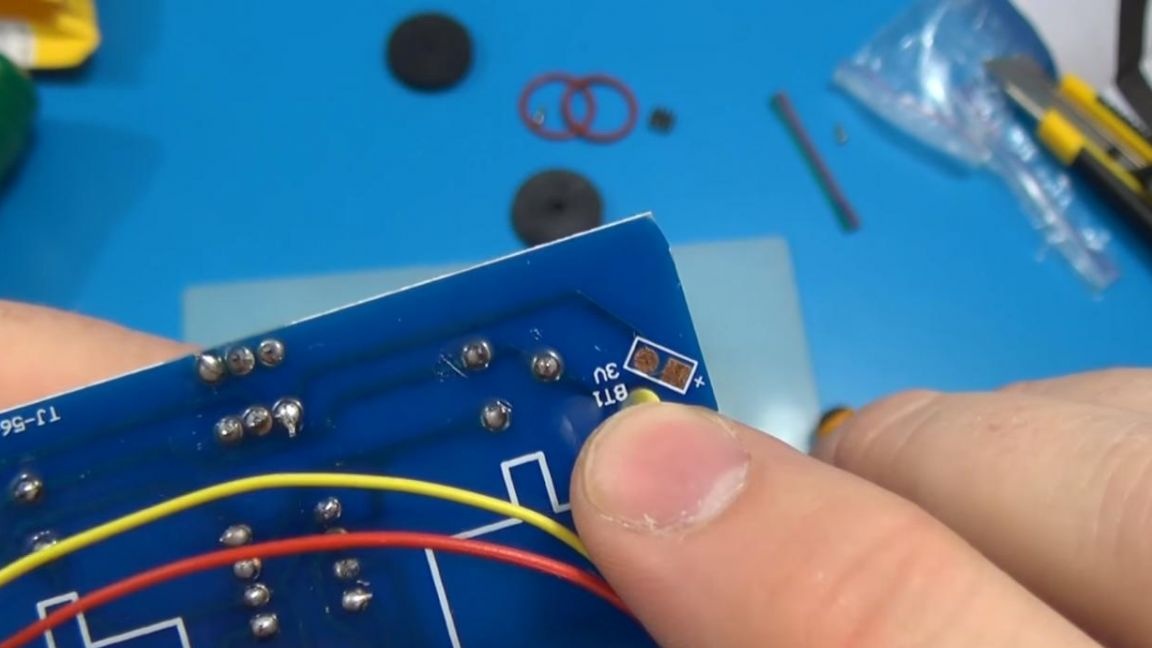
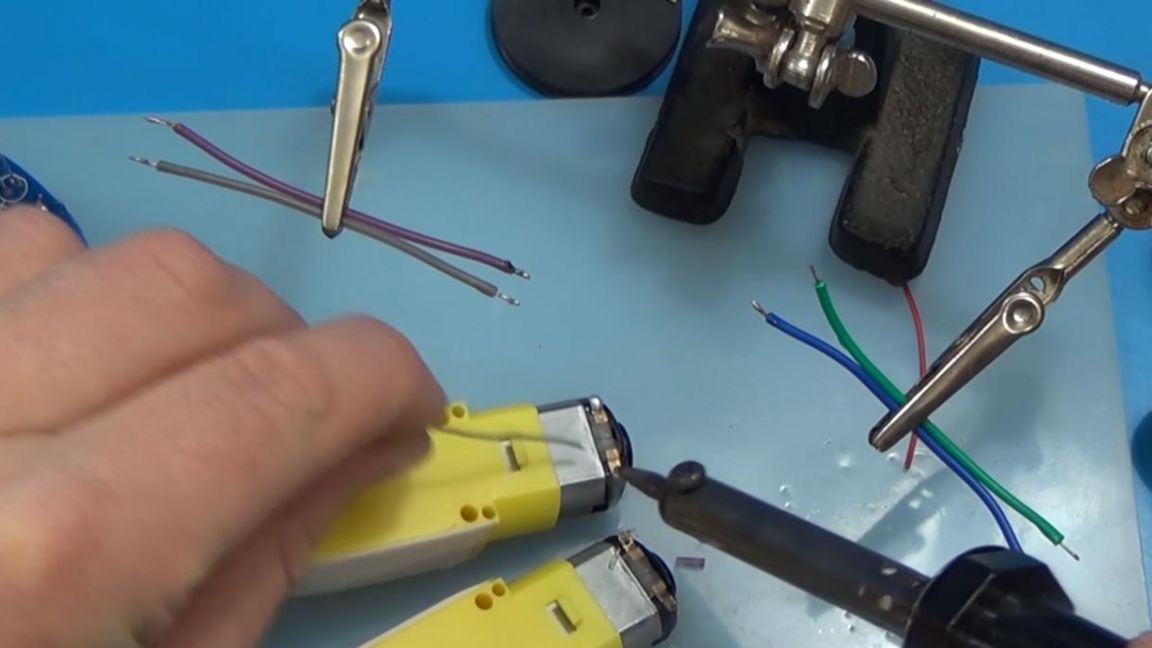
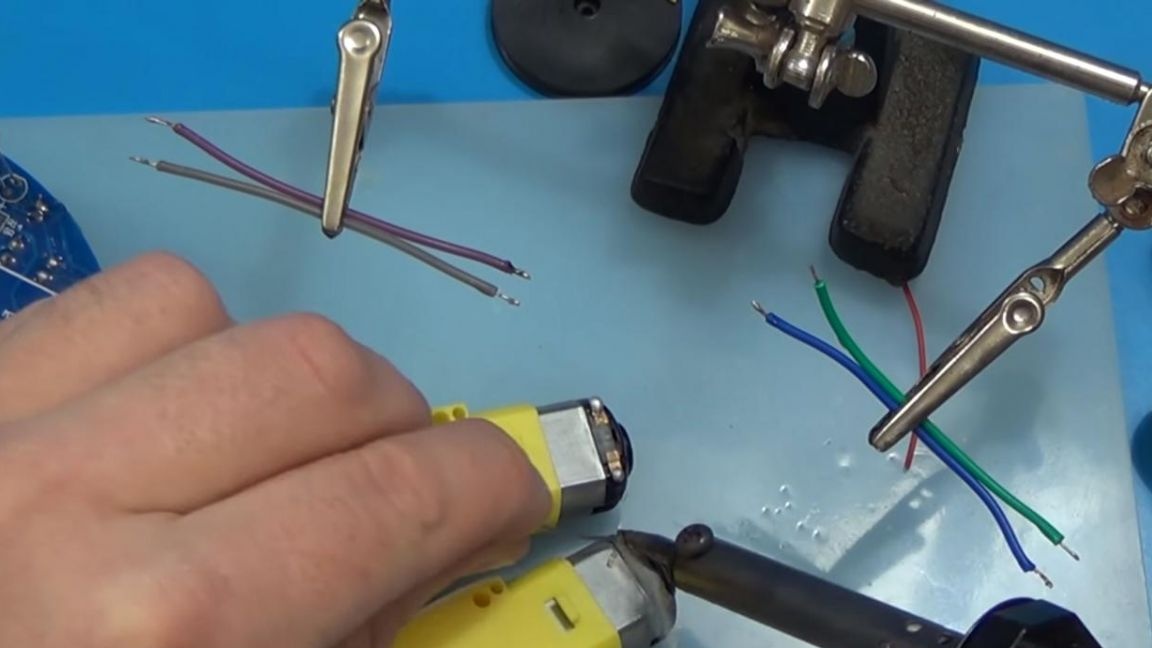
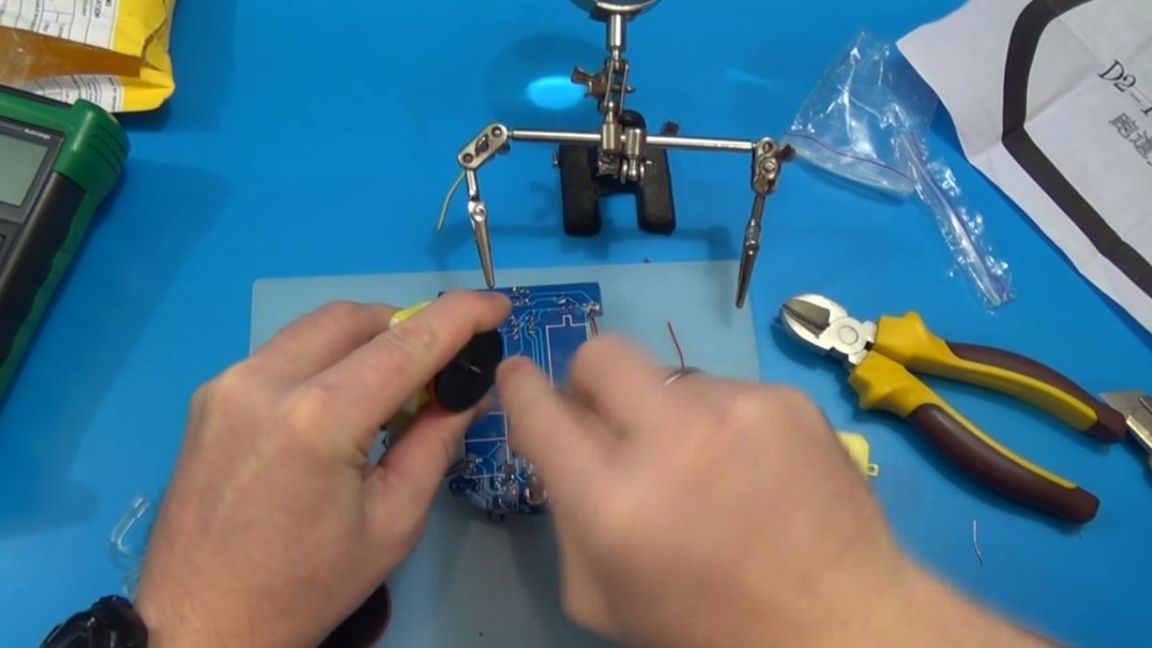
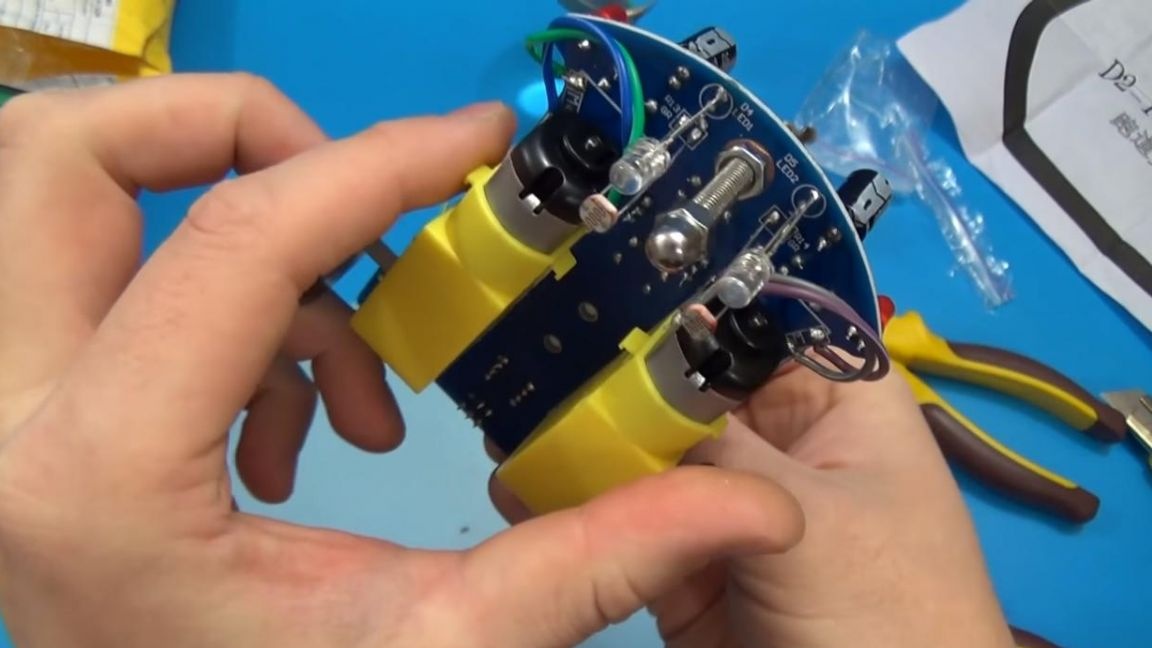
Kemudian kami mengambil motors dengan gear, kenalan mereka perlu diangkut dan dua wayar disolder kepada mereka, kami juga melekatkan kes untuk memasang bateri AAA dan solder wayar kuning ke tolak dan wayar merah ke tambah, kerana ia ditandatangani di papan.
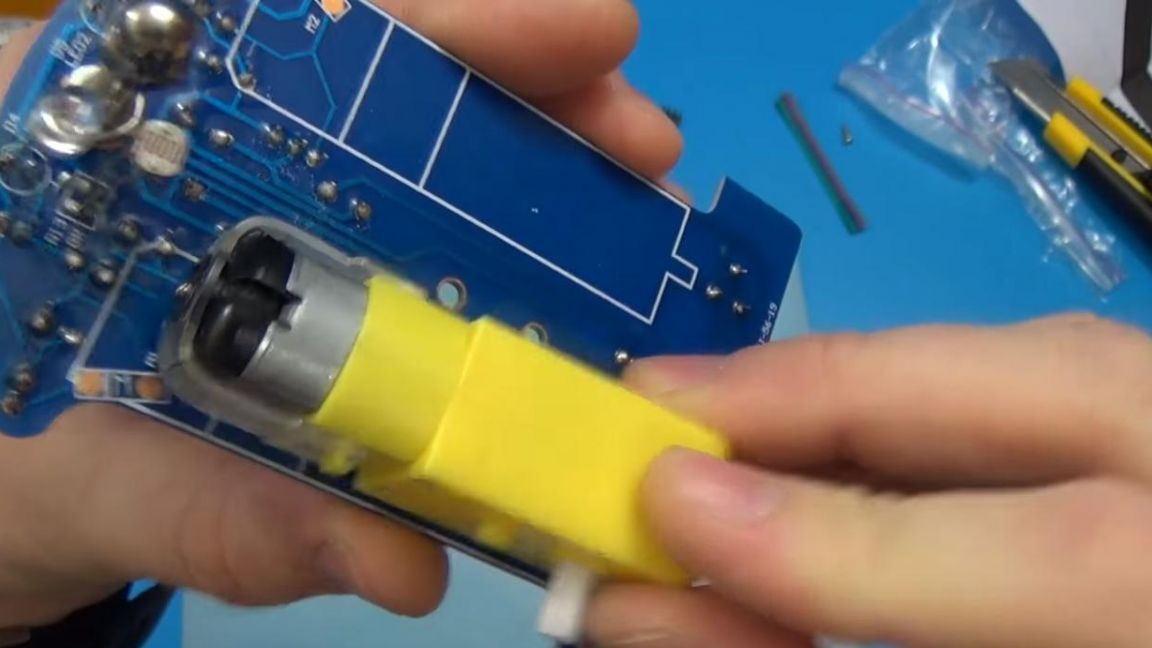

Sebelum memasang motor, anda perlu memasang roda untuk mereka, yang dipasang dengan satu bolt, dan pad getah diletakkan pada roda sendiri untuk cengkaman yang lebih baik.

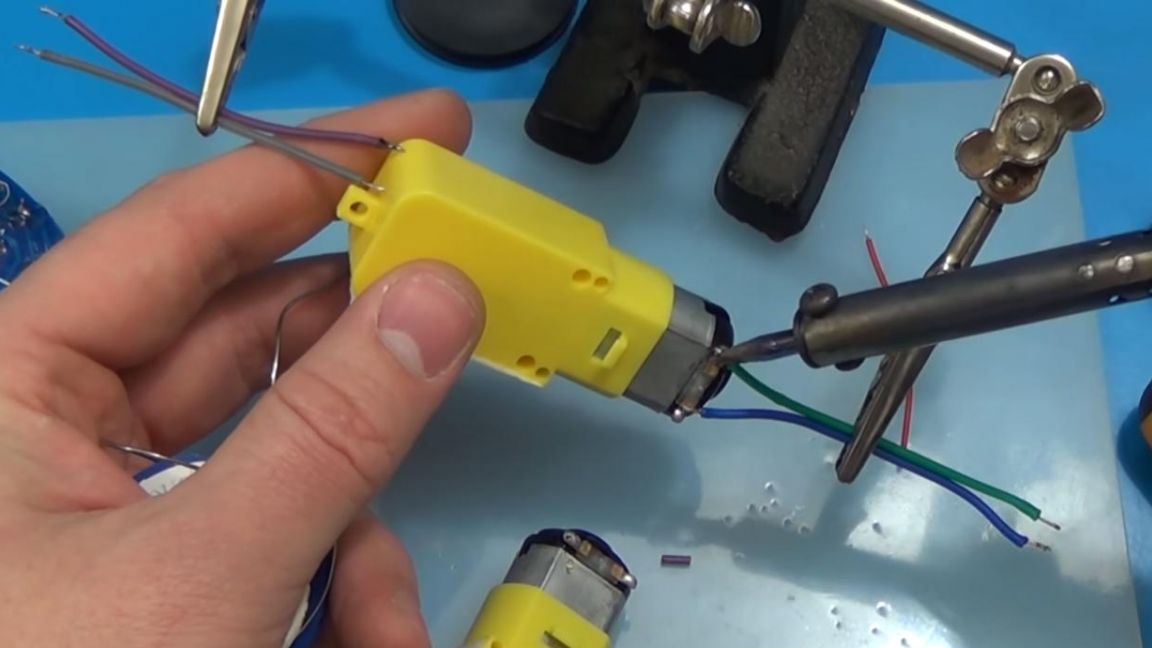
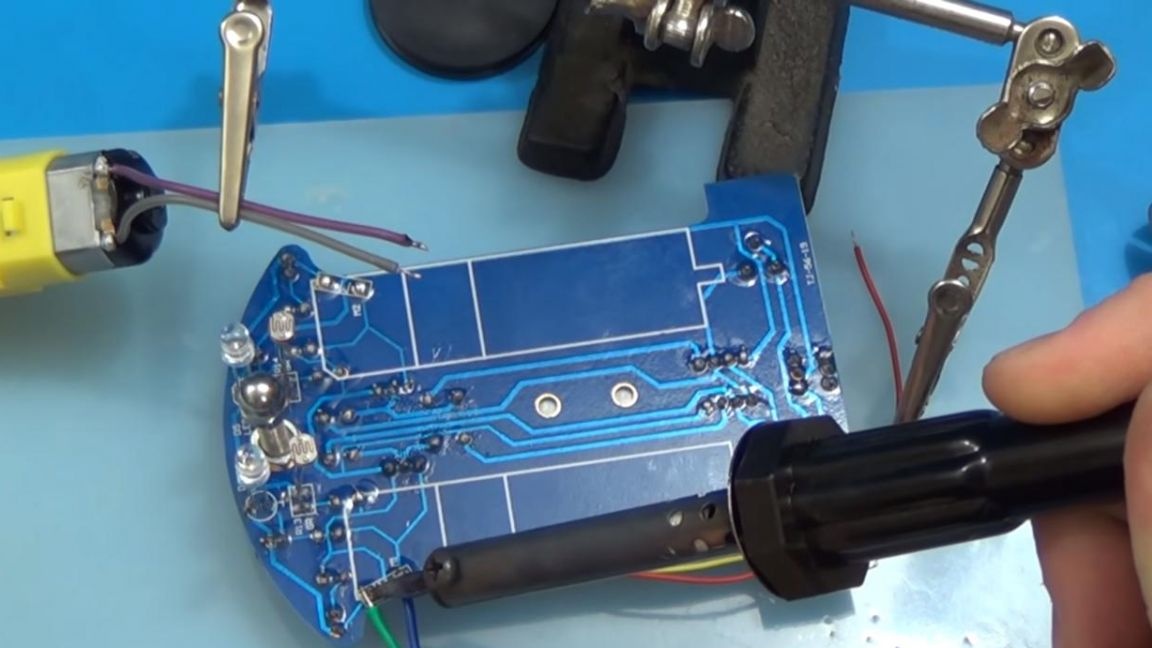
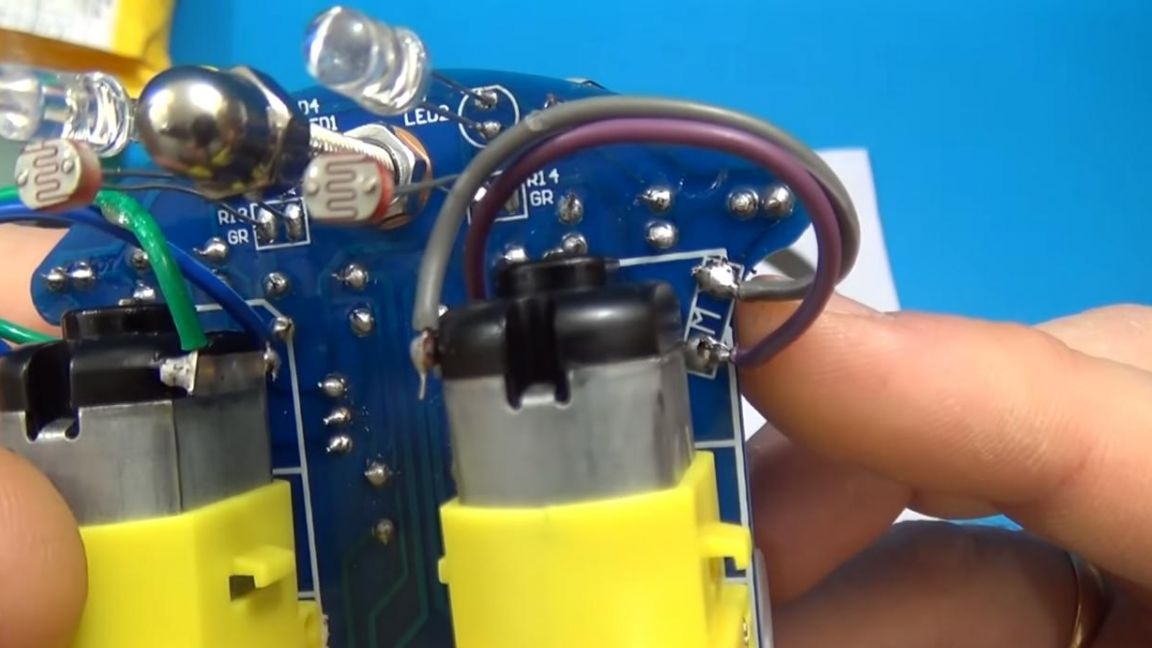
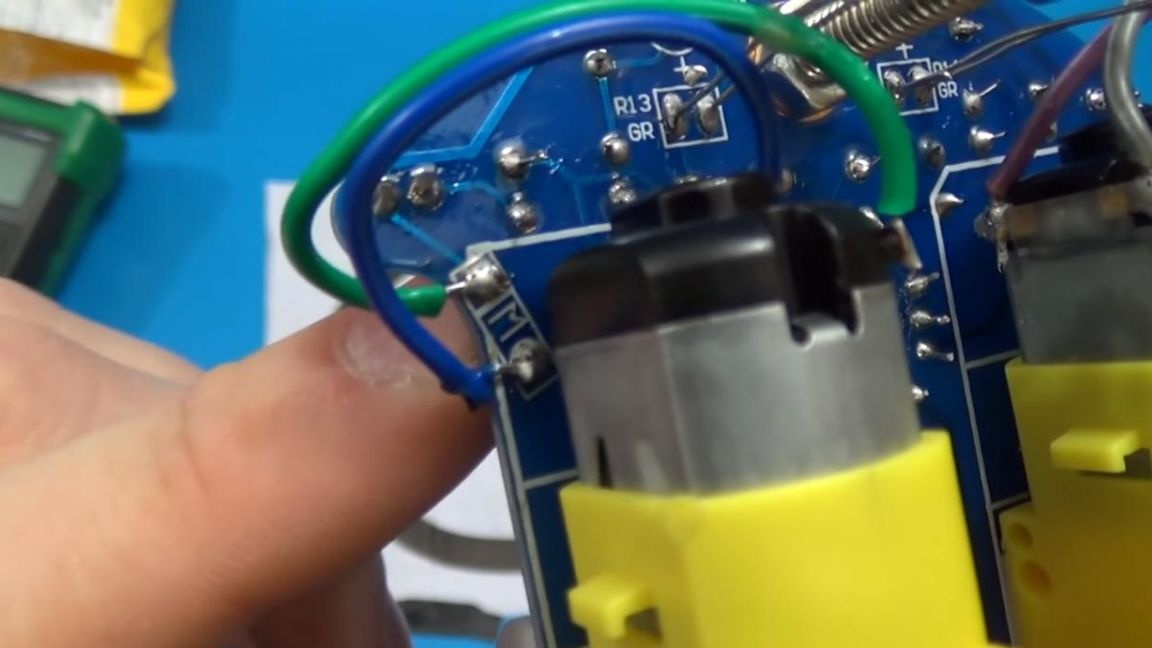
Kami menyolder wayar dari motor ke papan, sayangnya di mana ditambah, dan di mana tolaknya tidak ditunjukkan di sini, tetapi oleh percubaan dan kesilapan itu didapati bahawa hubungan atas motor mestilah dihubungkan ke atas pada papan menggunakan kawat dan besi pematerian, dengan bahagian bawah masing-masing, kita melakukan hal yang sama .
Nah, pada akhir perhimpunan, ia tetap memasang mikrosirkuit di papan di tempatnya yang tepat, menggabungkan kunci dengan papan dan memasukkan bateri, memerhatikan polariti.

Langkah ketujuh.
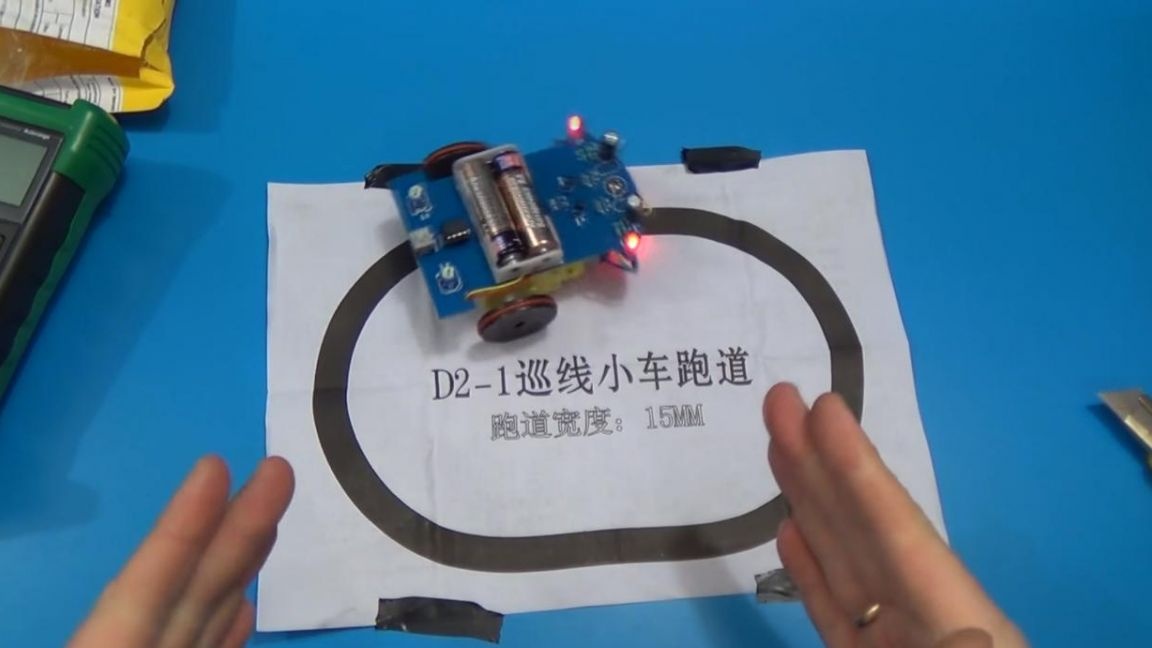
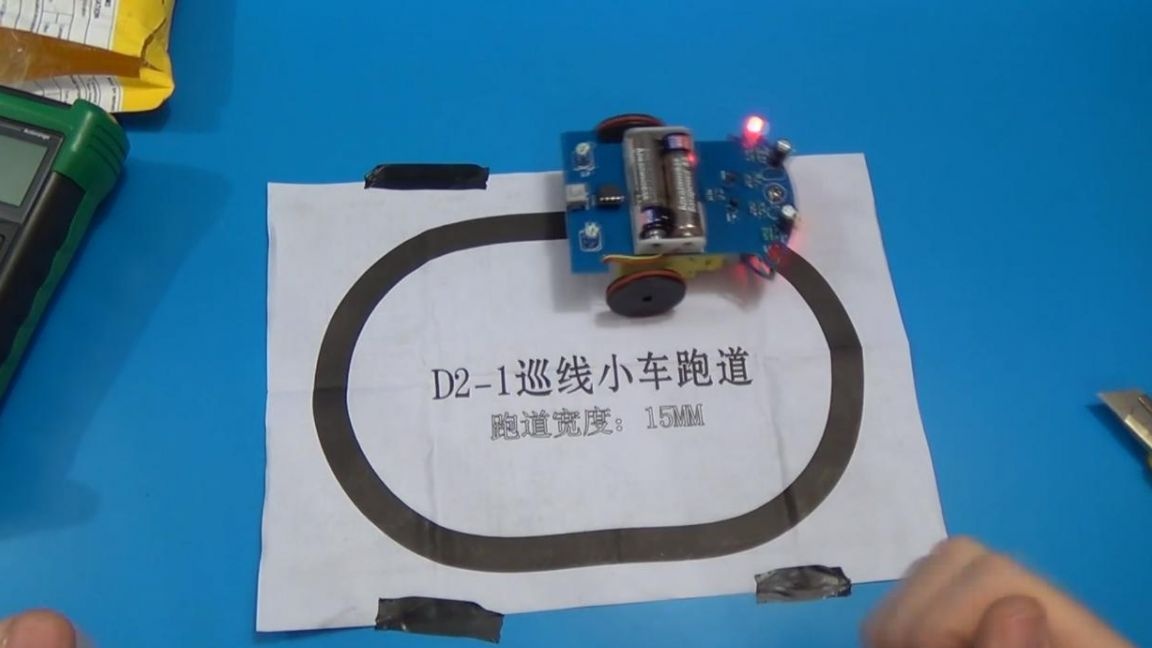
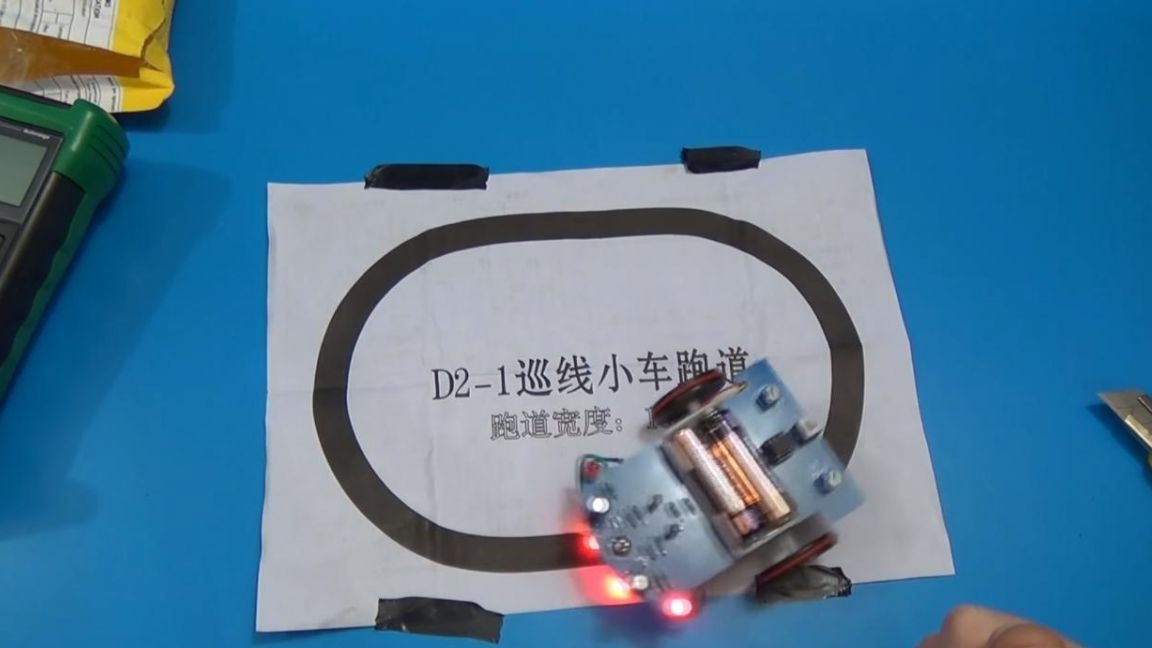
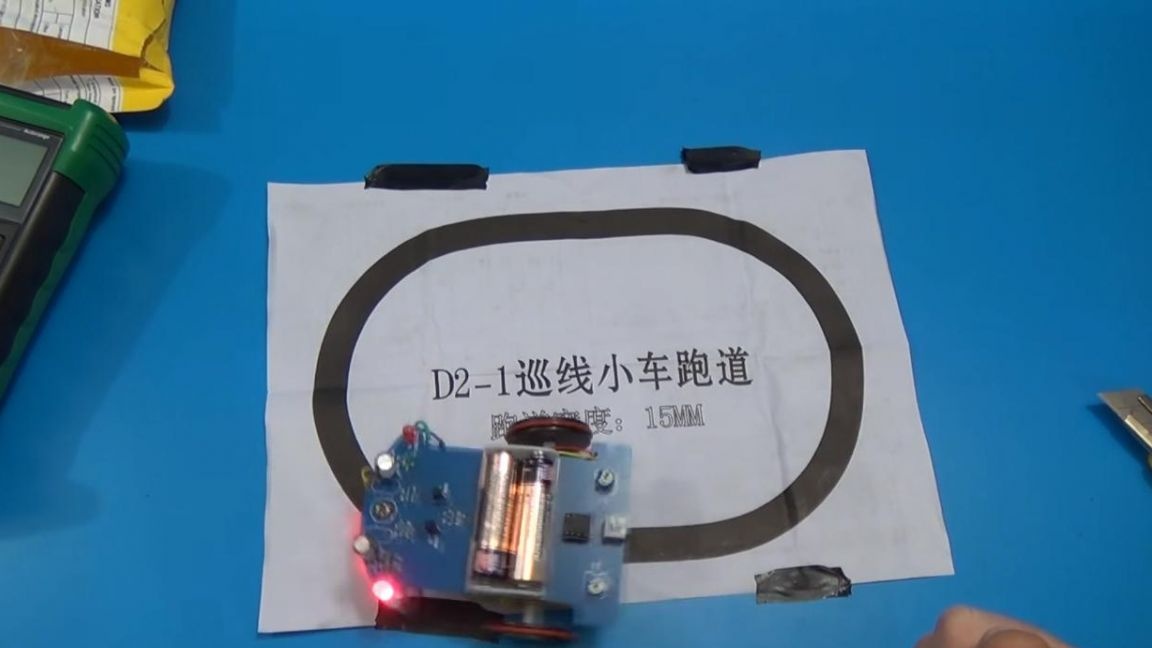
Oleh itu, masa telah datang untuk menguji robot ini, kit termasuk arahan di belakang yang bujur telah dilukis dengan garis dengan lebar 15 mm, yang merupakan nilai optimum.
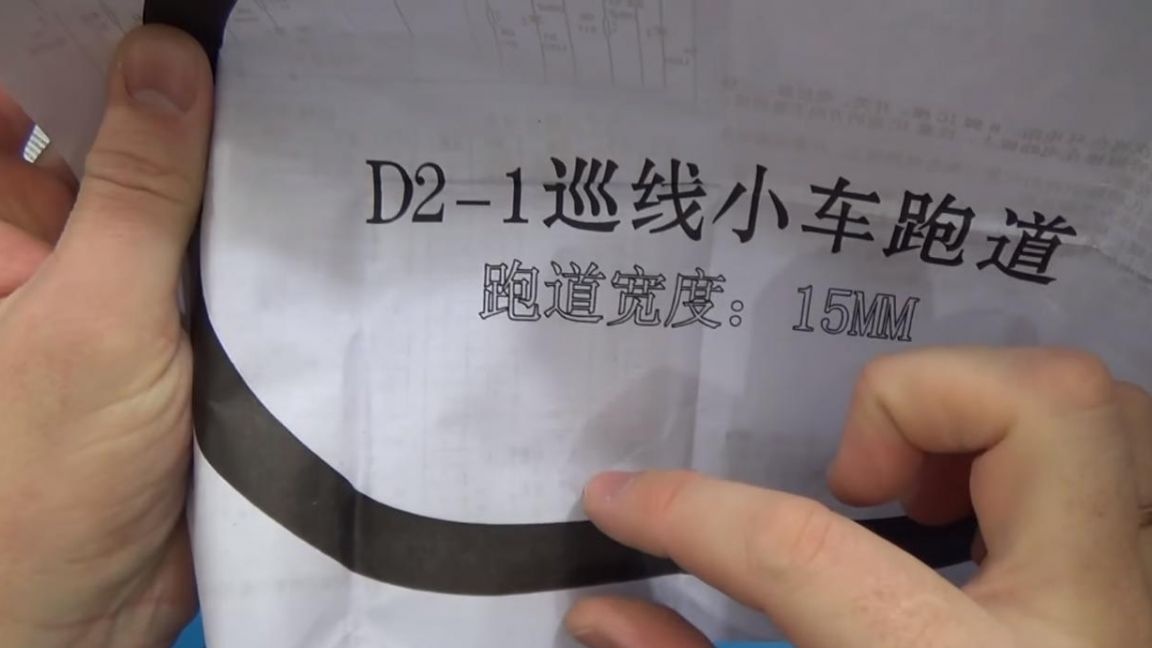
Tekan butang kuasa dan robot itu Saya pergi, untuk operasi yang betul, garis tidak harus tajam, iaitu, dia tidak akan dapat membuat giliran tajam. Contohnya, anda boleh membuat trek dengan lilitan lancar dengan menggunakan pita dengan lebar 15 mm pada salutan walaupun.
Itu sahaja untuk saya, terima kasih semua untuk perhatian dan kejayaan kreatif anda.