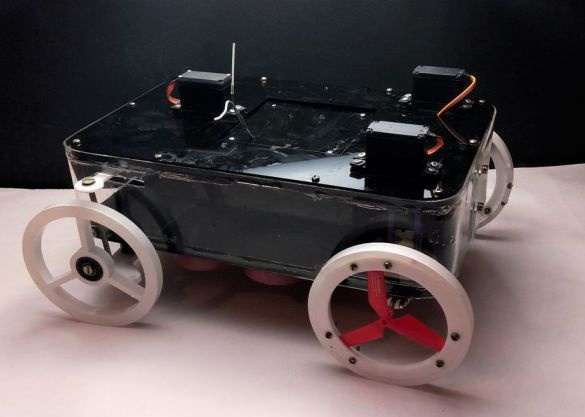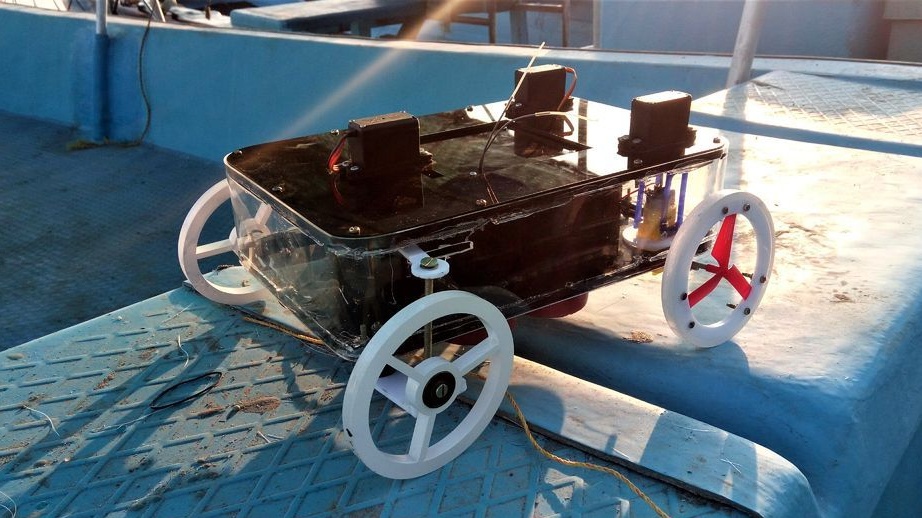



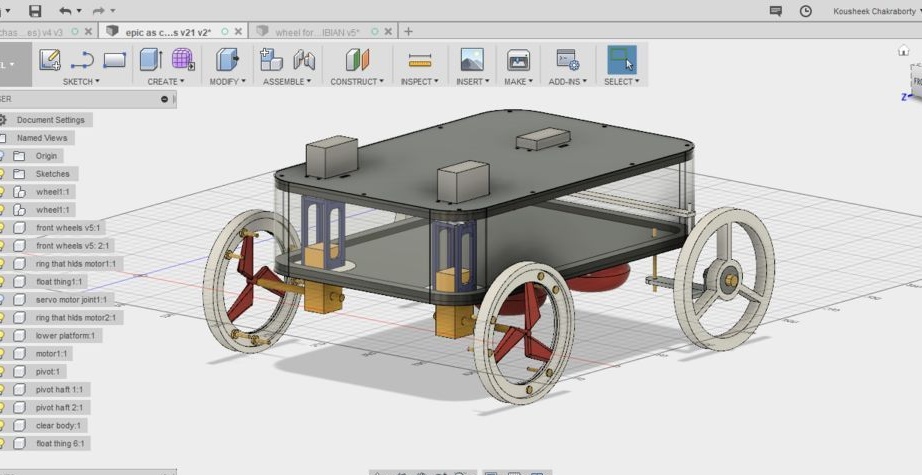
Dalam artikel ini, kami akan mempertimbangkan pembuatan oleh pengrajin India sebuah kenderaan semua rupa bumi yang bergerak di darat dan di atas air. Semua kenderaan rupa bumi terdiri daripada platform terapung dengan roda dan kipas. Mekanisme dikawal oleh alat kawalan jauh melalui Arduino UNO.
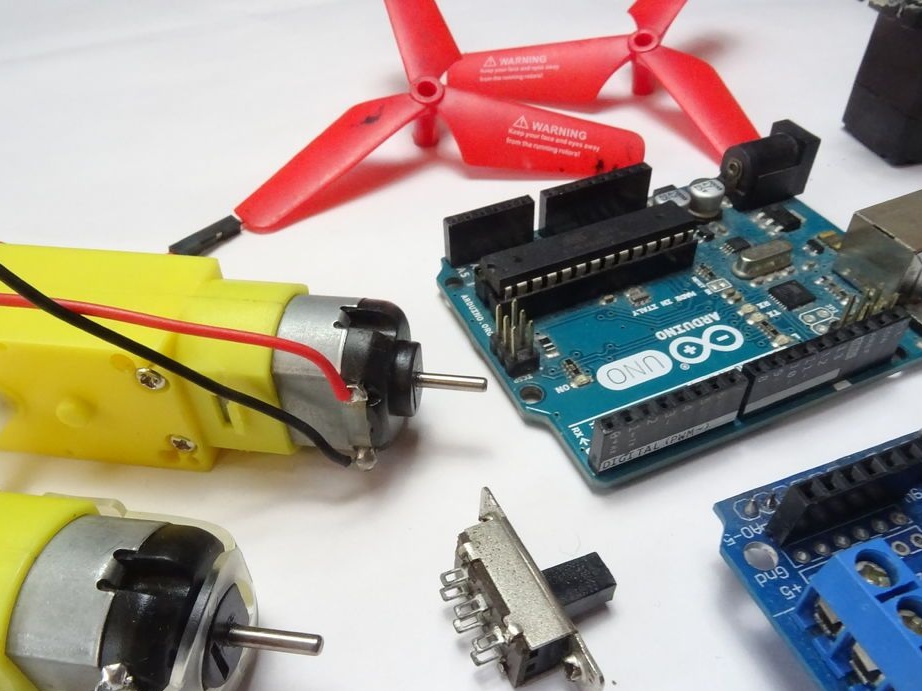
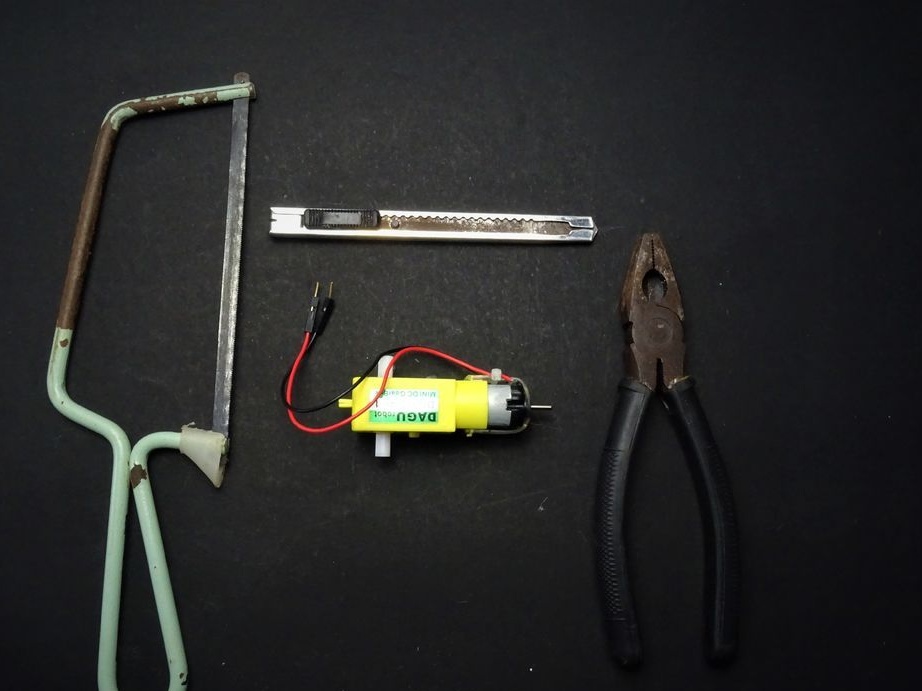
Alat dan bahan:
-
-AKB 9V;
-Switch;
-Acryl;
-Plywood;
(dengan rujukan, galas ialah 8 x 16 x 5 mm, penulis menunjukkan 8 * 22 mm)
-Dua baling-baling;
-Fasteners;
-Floats;
-Glue gun;
-Perkara tambahan;
Resin epoksi;
-Pemeterian besi;
-Drill;
-Pemotong pemasar;
-Saw;
- pemutar skru;
-Drill;
-Pemeterian besi;
-Board;
-Komputer dengan perisian;


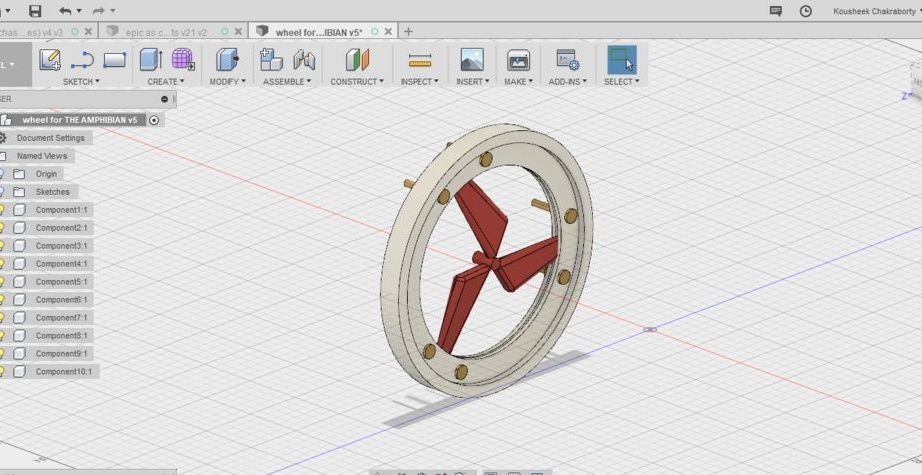
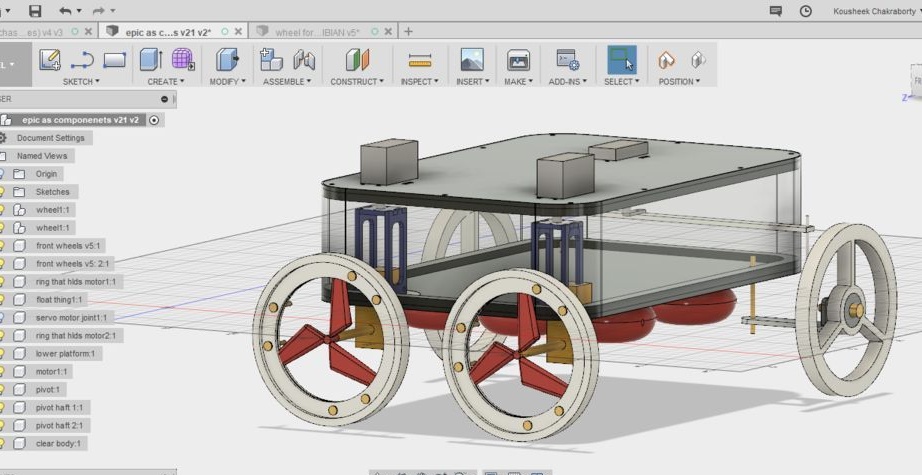
Langkah Pertama: Reka bentuk
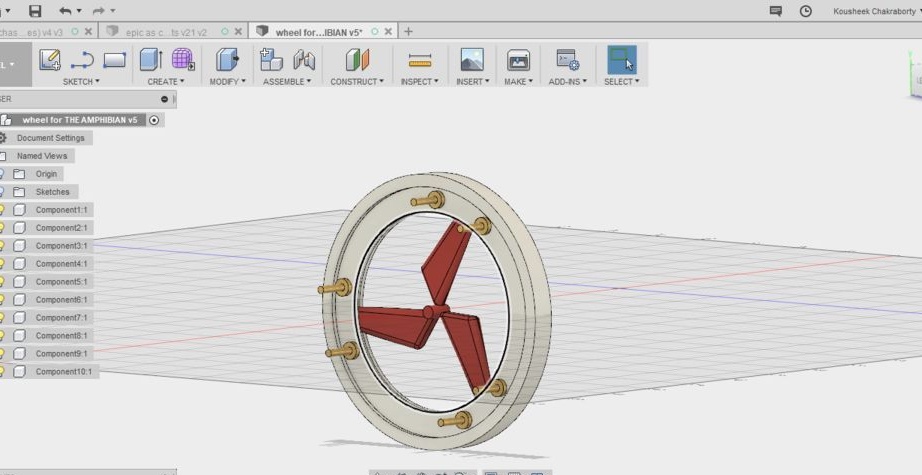
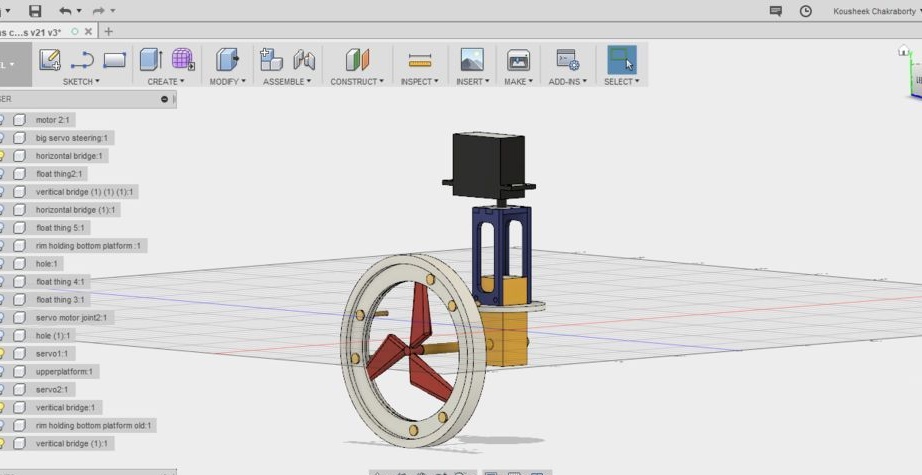
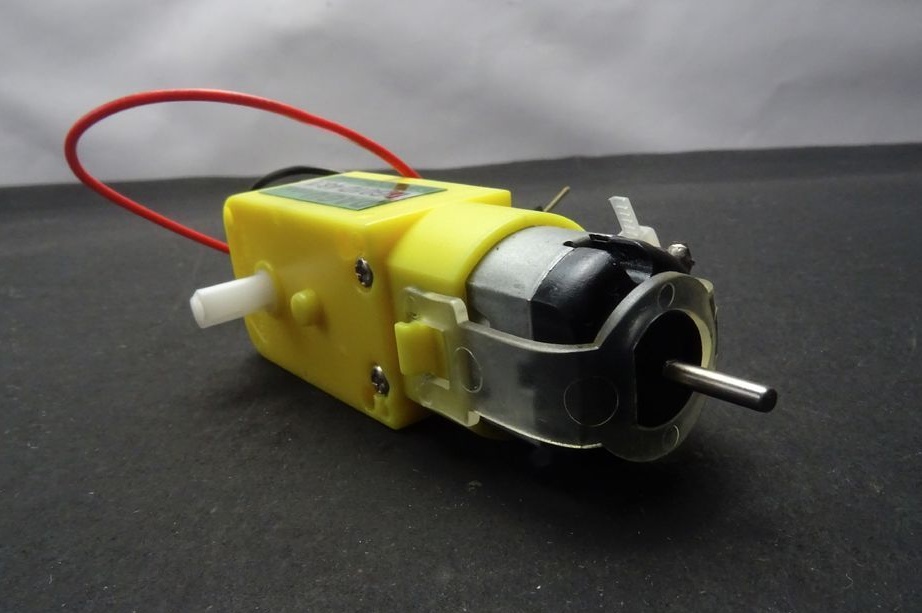
Untuk membuat projek itu, tuan menggunakan program Fusion 360. Kesukaran keseluruhan adalah untuk menggabungkan pergerakan di darat dan di dalam air. Apabila mereka bentuk roda, tuan-tuan membangun satu sistem di mana skru akan terbuka di dalam air, tetapi memandangkan kerumitan reka bentuk, mereka hanya menggabungkan kipas dari mainan kanak-kanak di dalam roda. Ini membolehkan roda menggerakkan semua kenderaan rupa bumi di darat, dan apabila mereka memasuki air, skru dihidupkan.
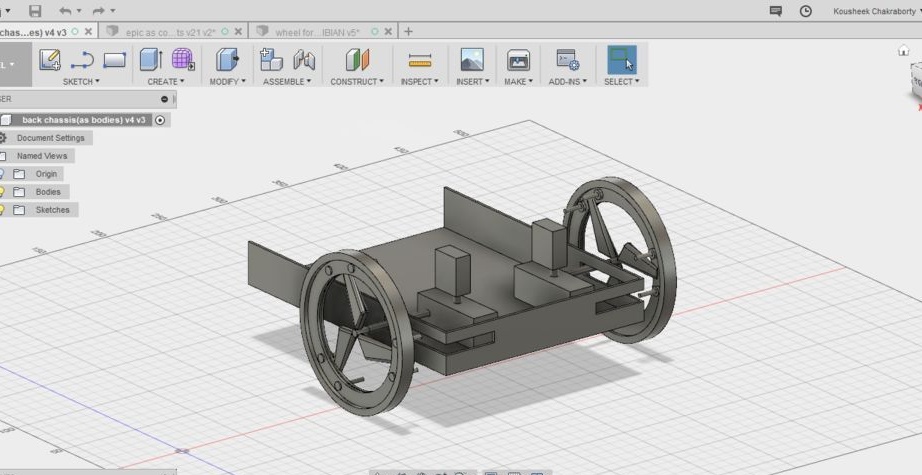
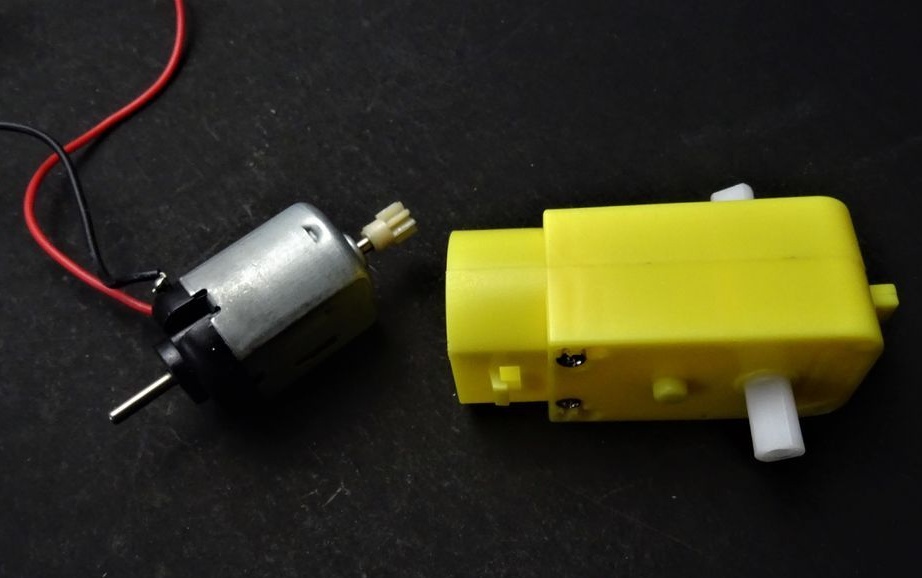
Untuk melaksanakan idea ini, anda perlu memutar roda belakang berserenjang dengan kenderaan semua rupa bumi semasa memandu di atas air. Ini menjadi mungkin apabila gear enjin dikeluarkan dari bingkai. Kotak gear plastik dan air memasuki mereka tidak akan membahayakan.
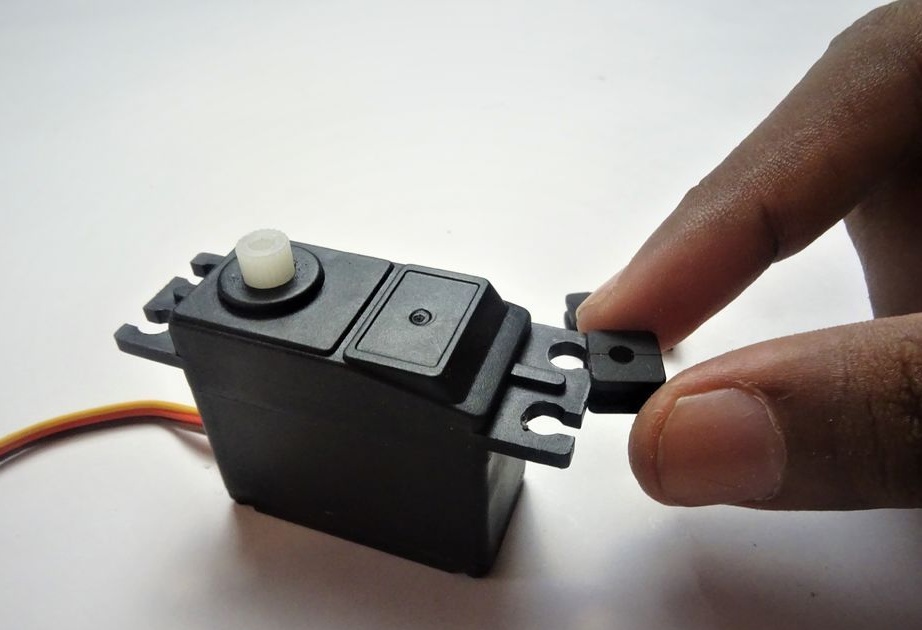
Putaran skru roda akan dijalankan menggunakan pemacu servo.
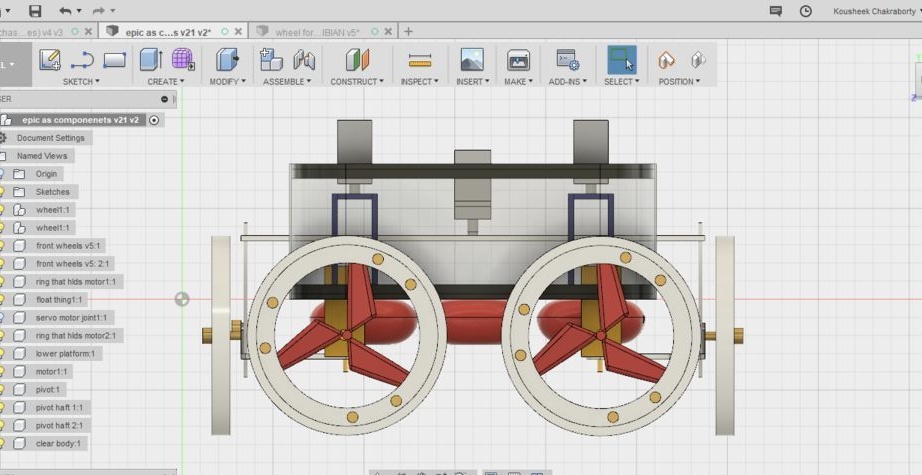
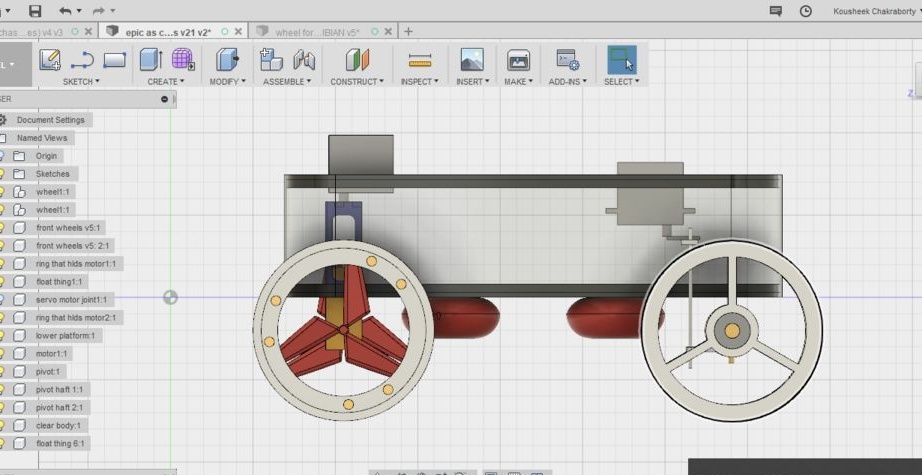
Kenderaan semua rupa bumi mempunyai dua mekanisme perubahan. Satu untuk mengawal roda belakang kipas di dalam air, dan yang kedua, untuk memandu di darat, mengawal roda depan. Sudut putaran roda depan adalah 35 darjah, yang membolehkan anda membuat giliran tajam.
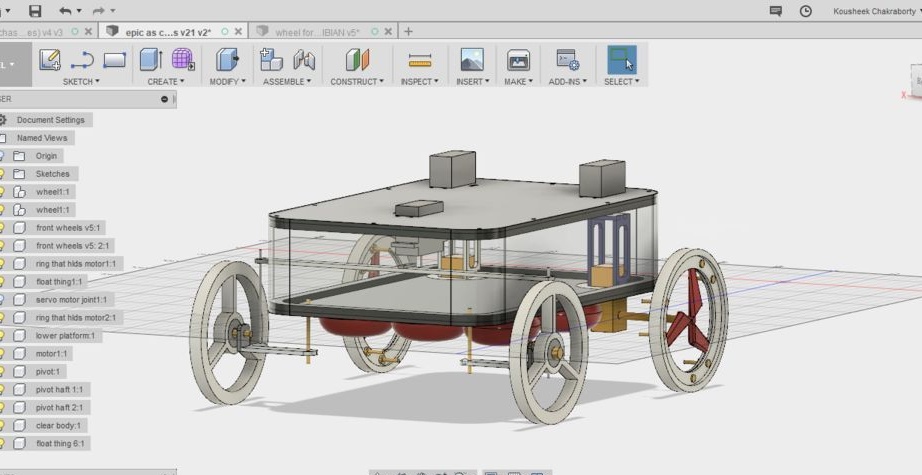
Dalam gambar-gambar di bawah ini anda dapat melihat transformasi kenderaan semua bumi apabila bergerak melalui tanah dan air.
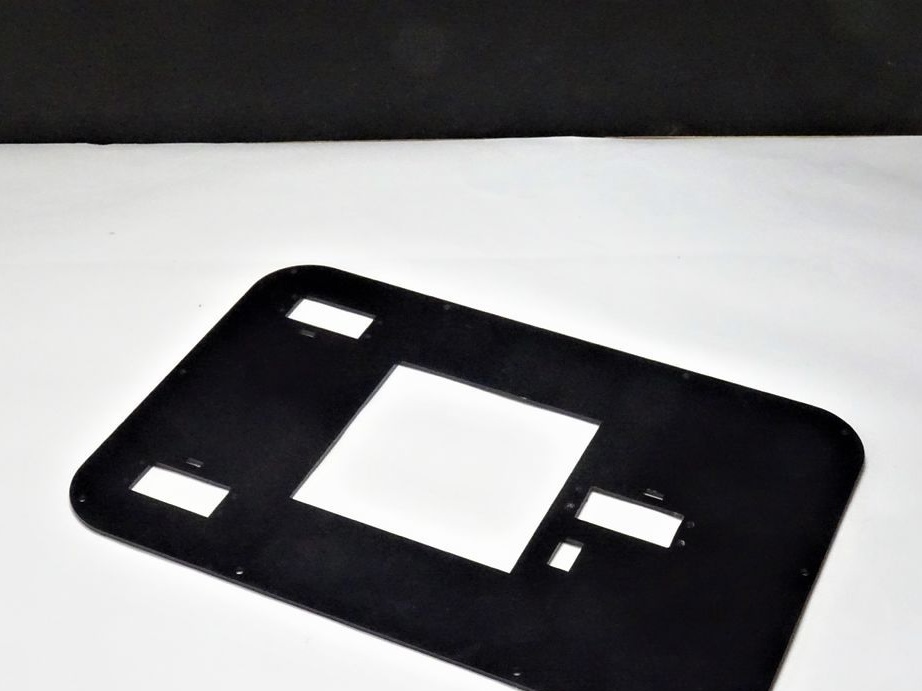
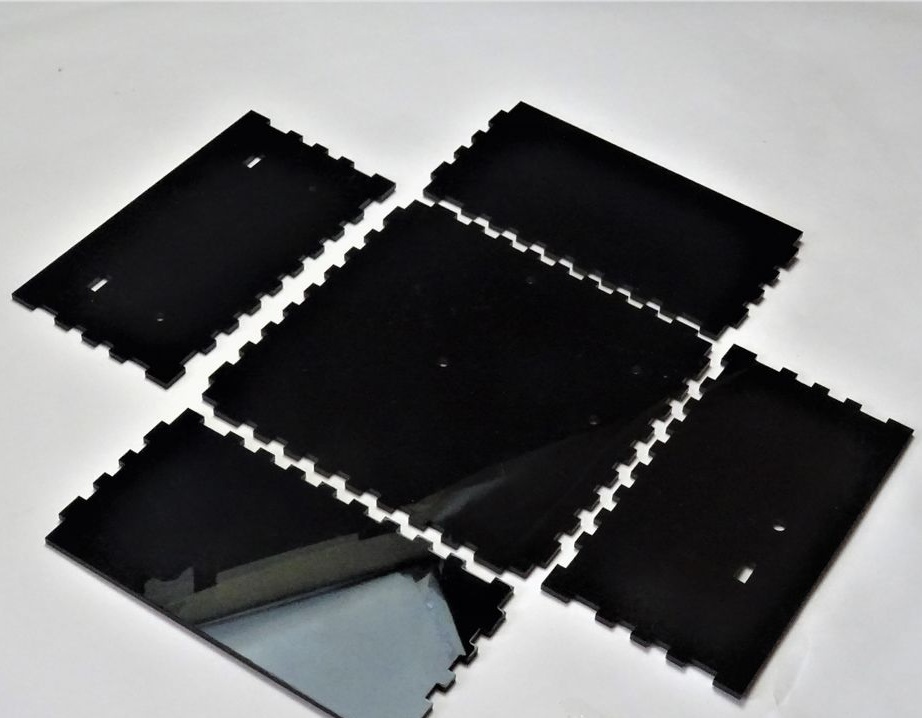
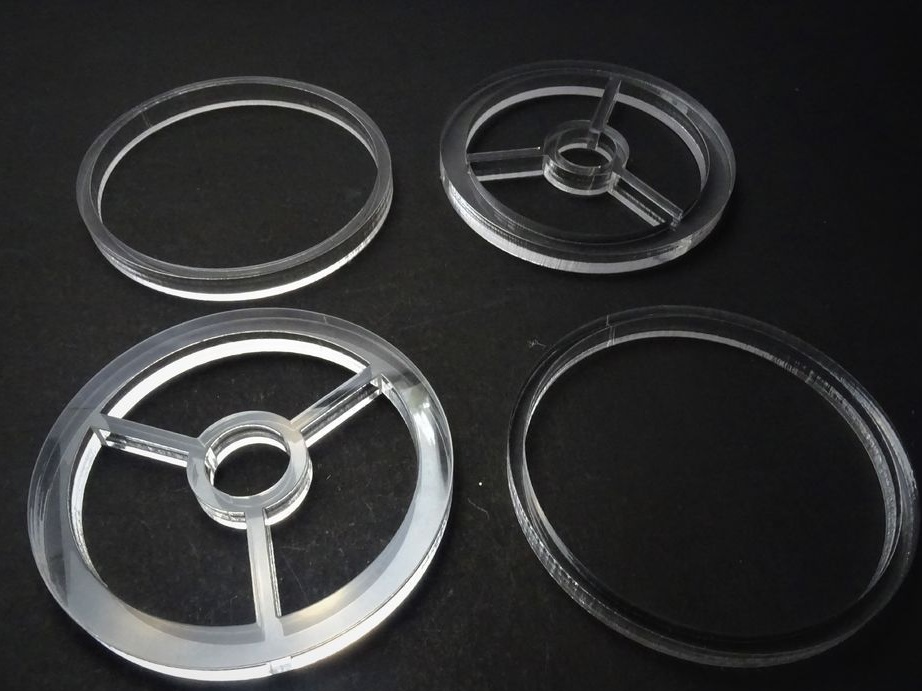
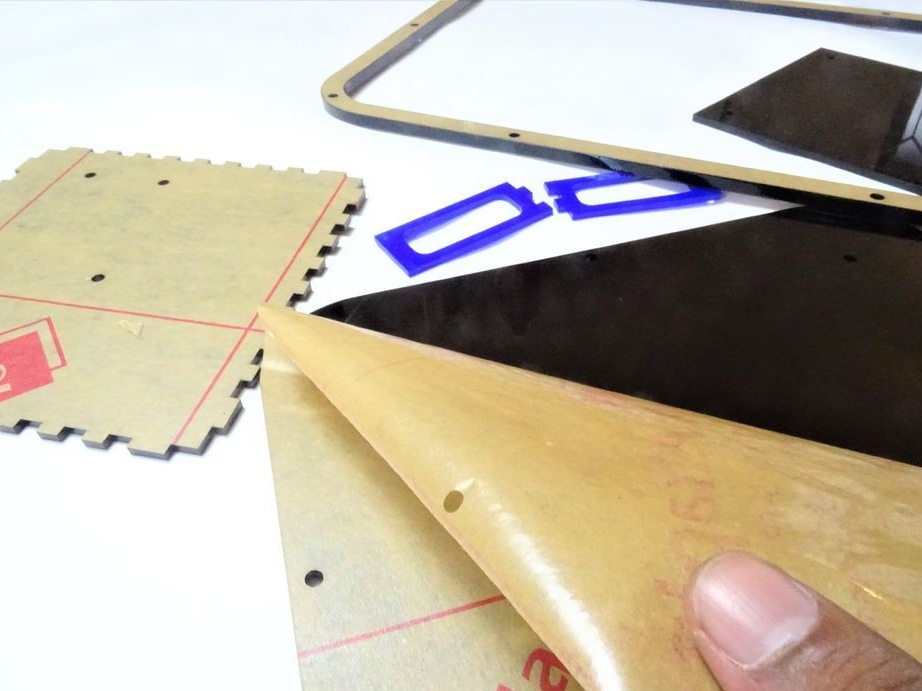
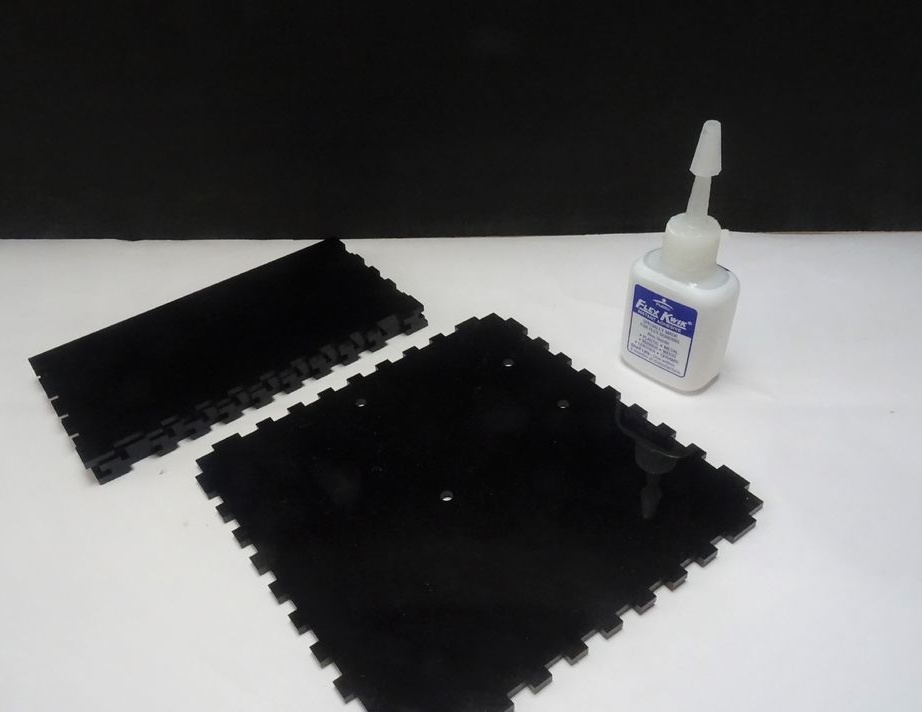
Langkah Dua: Pemotongan Laser
Untuk kenderaan semua rupa bumi, tuan menggunakan akrilik dengan ketebalan dan warna yang berlainan.
Lap top hitam 3 mm x 1
Lapisan Bawah Hitam 3 mm x 1
Bingkai sebelah hitam 5 mm x 2
Dinding sebelah lutsinar 2 mm x 1
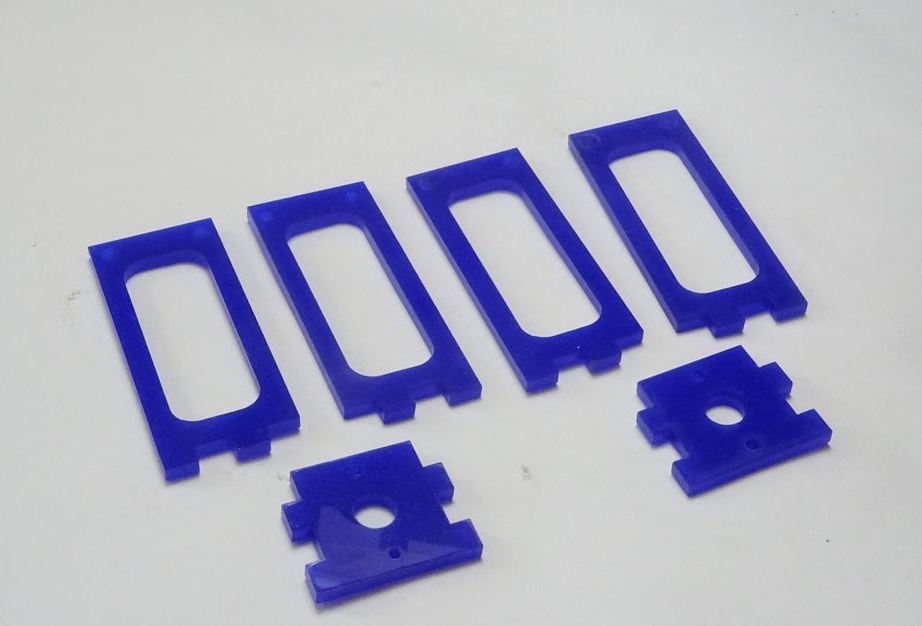
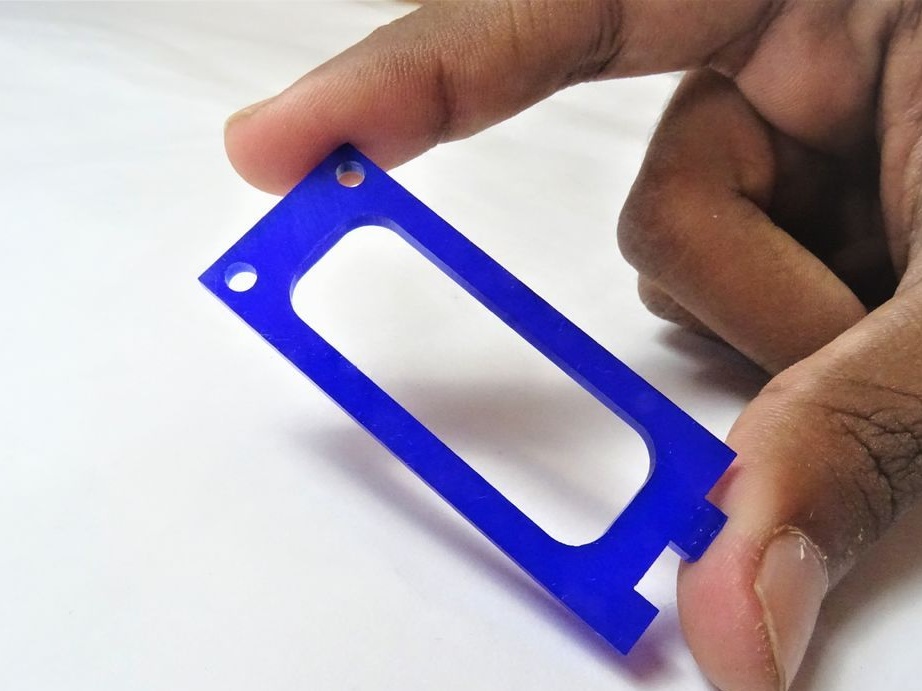
Bahagian kuasa biru 3 mm x 4
Bridge Top Piece Blue 3 mm x 2
Engine DisK Putih 3 mm x 2
Roda depan putih 10 mm x 2
Roda Dalaman (Belakang Roda) Putih 3 mm x 4
Rim luar (roda belakang) Putih 10 mm x 2
Pemandu Putih 3 mm x 1
Kabinet laci Hitam 3 mm x 1
Perlindungan petak hitam 3 mm x 1
Bahagian belakang motor putih 3 mm x 2
Panel depan putih 5 mm x 2



Anda boleh memuat turun fail untuk CNC dari pautan.
Laser Cutting Rover Parts.zip
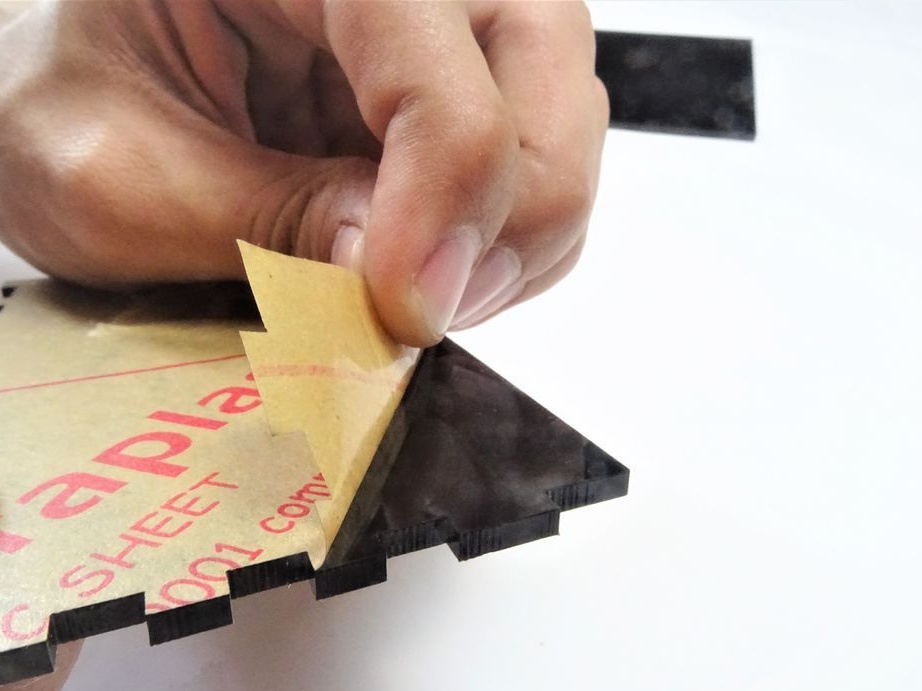
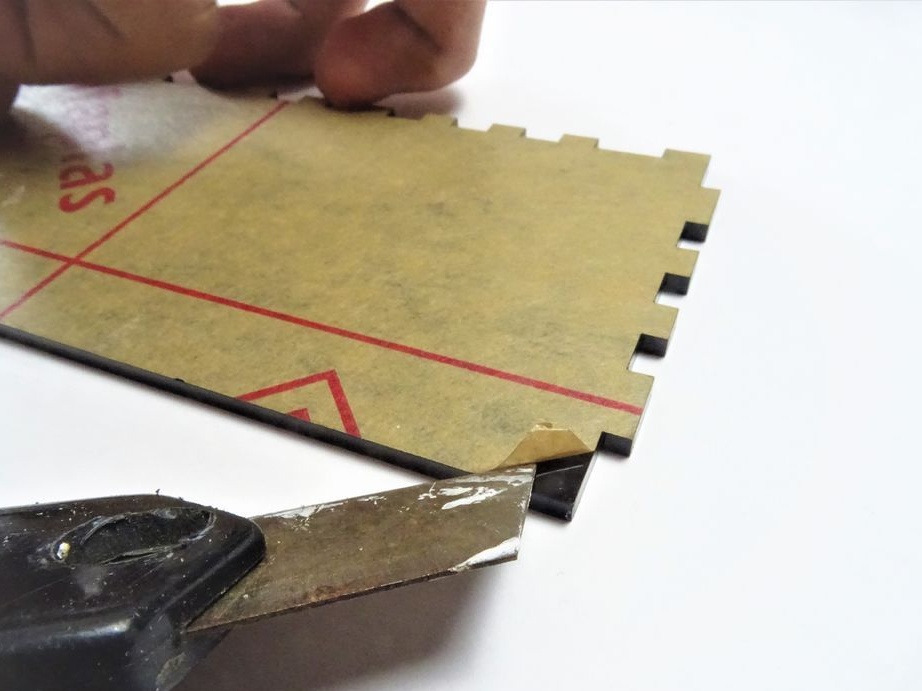
Selepas mengeluarkan bahagian-bahagian, menghilangkan lapisan perlindungan dari mereka.
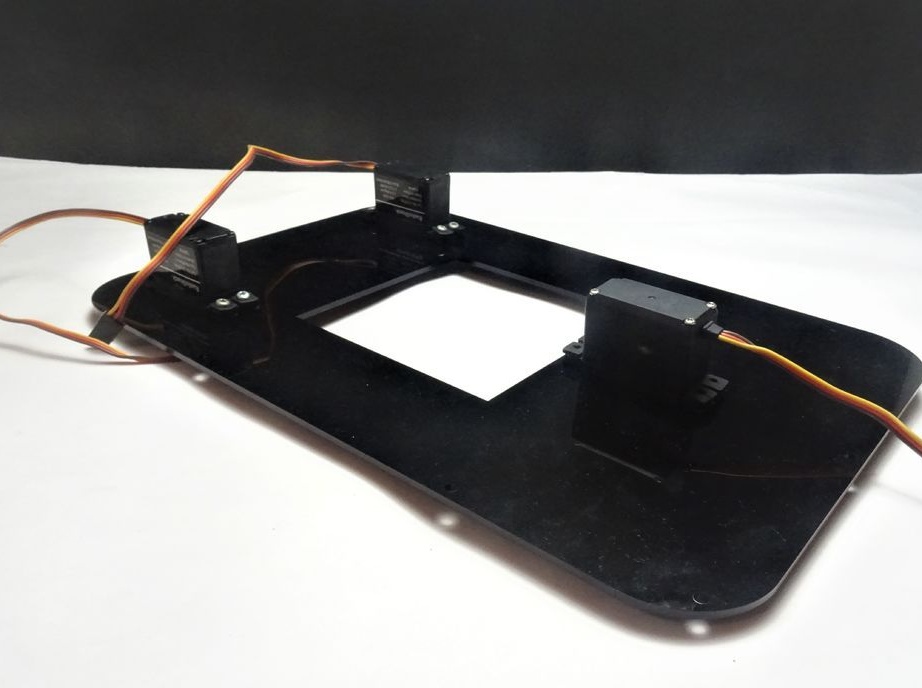
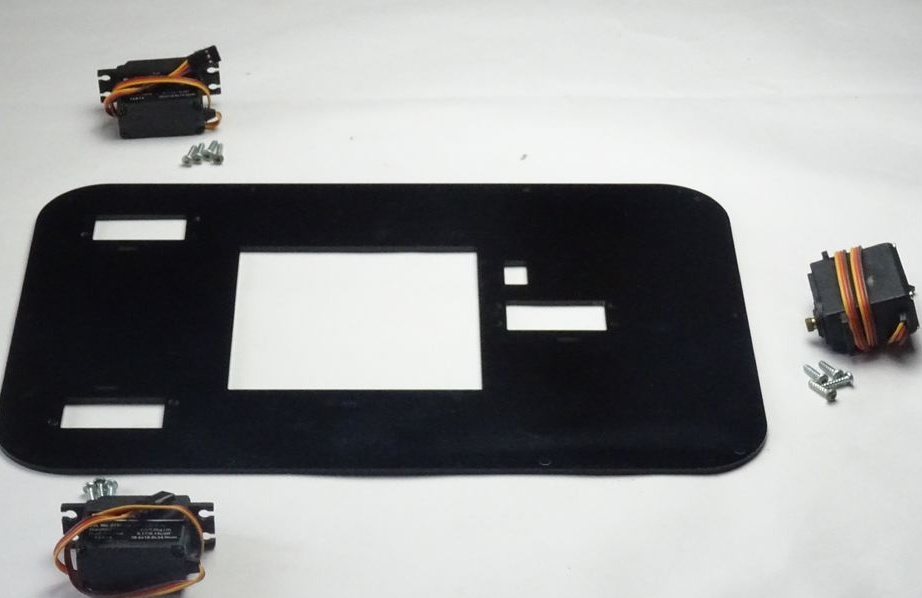
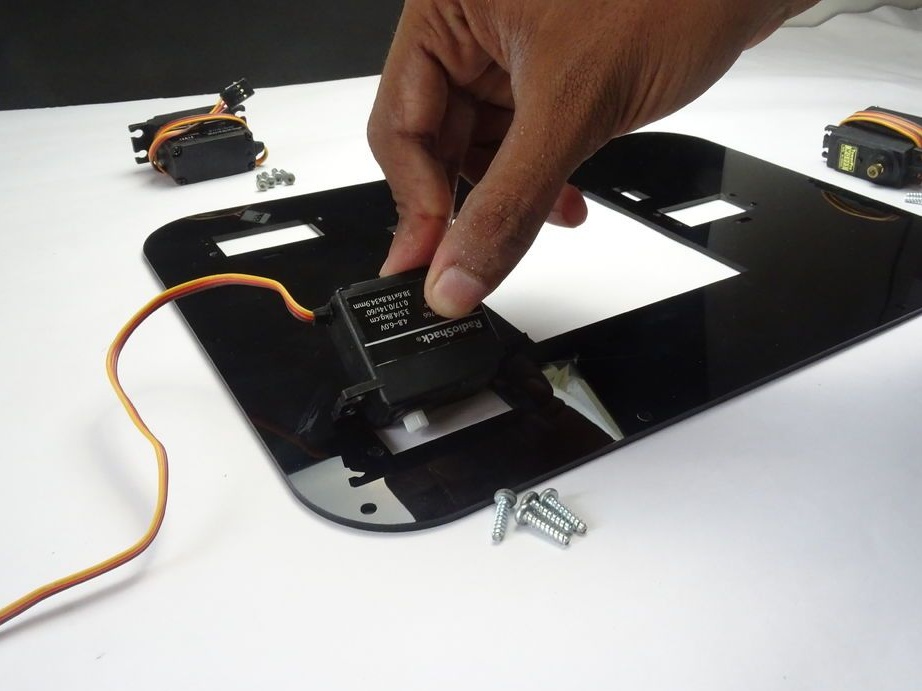
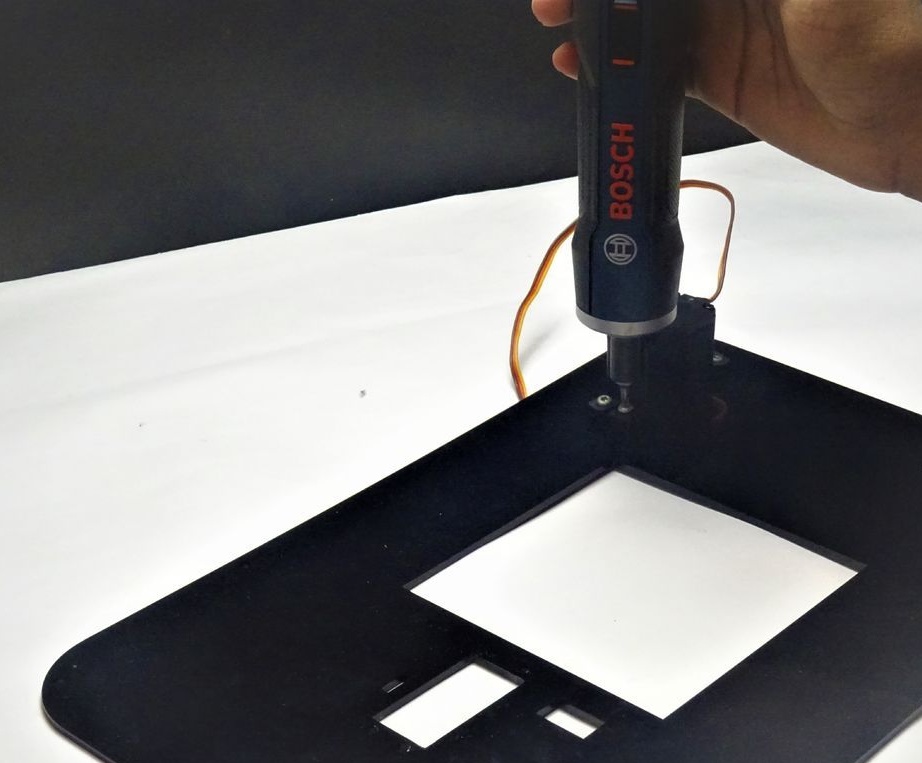
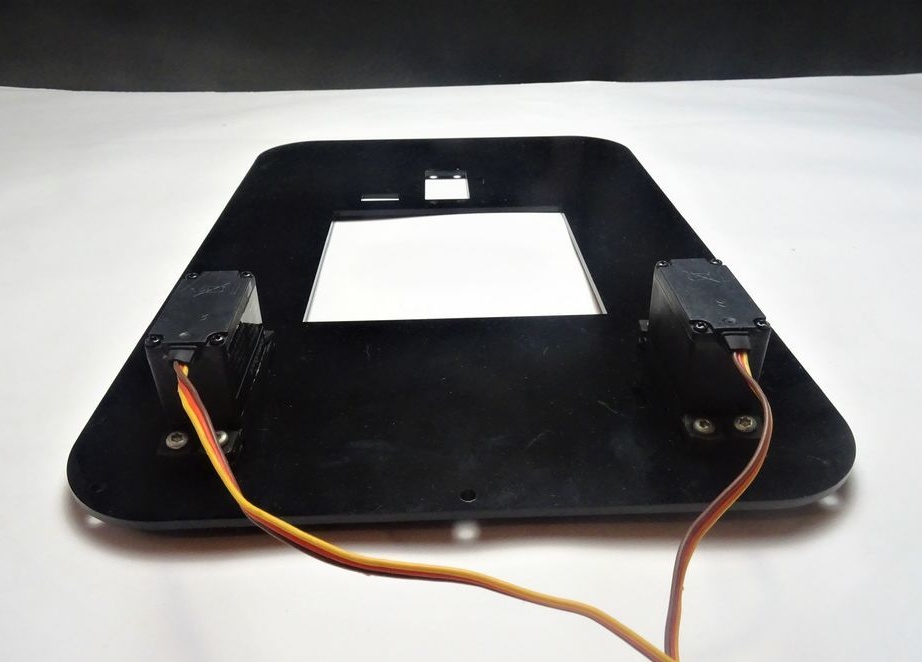
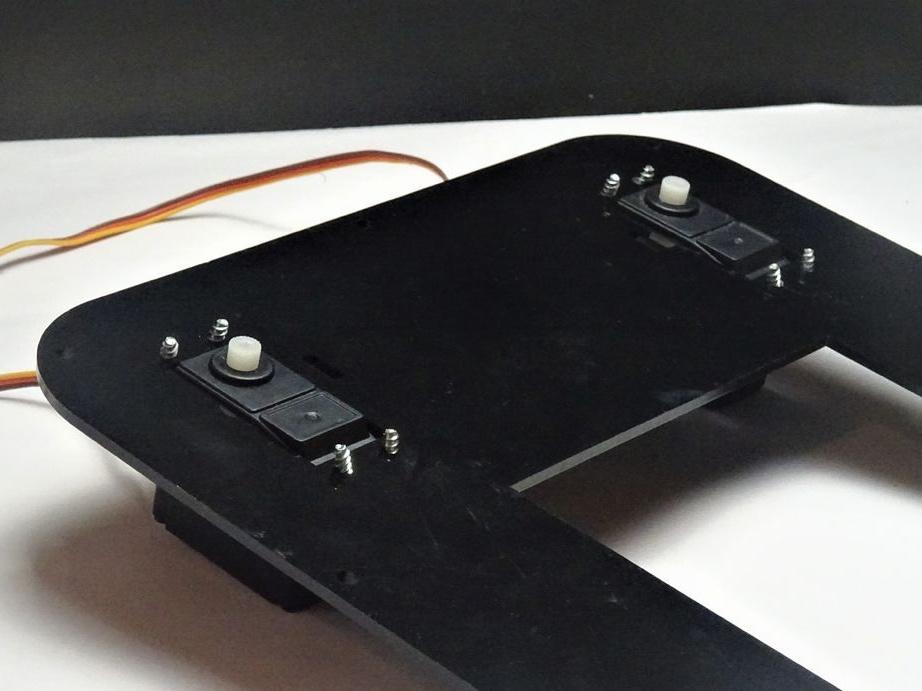
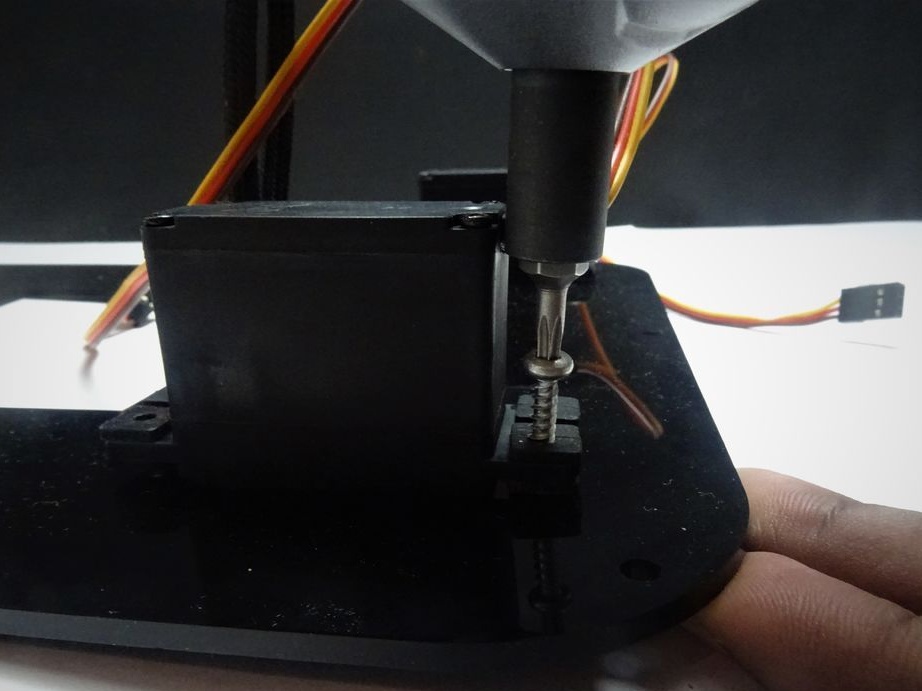
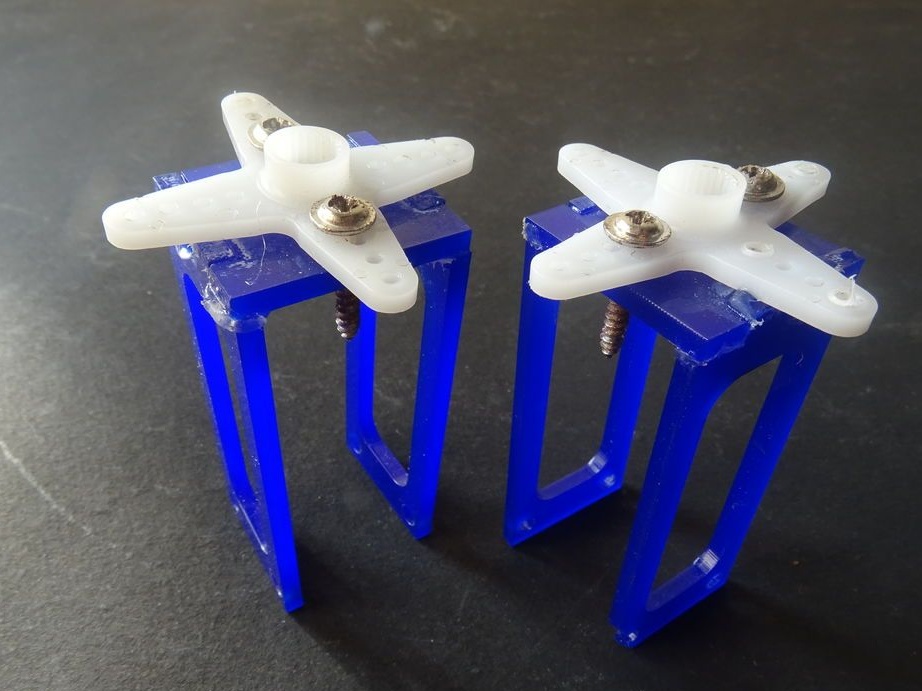
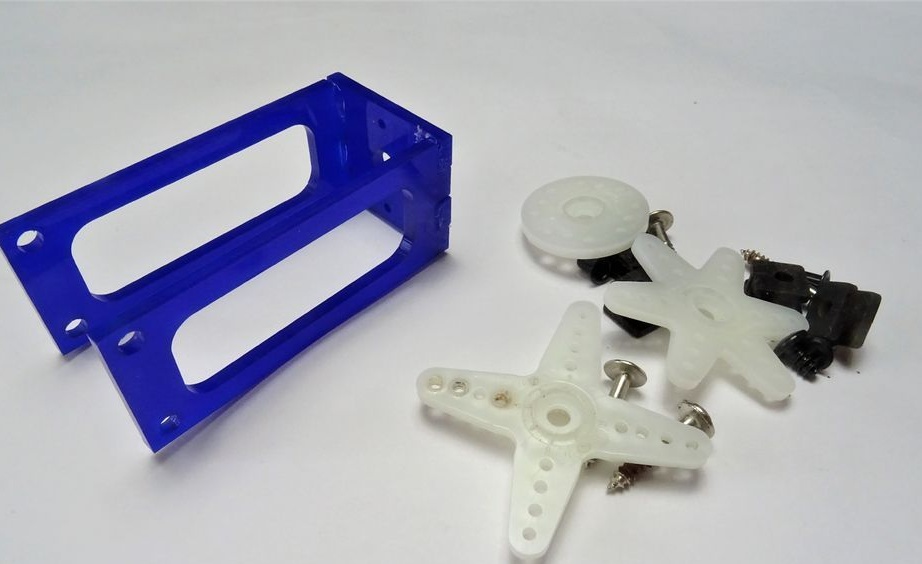
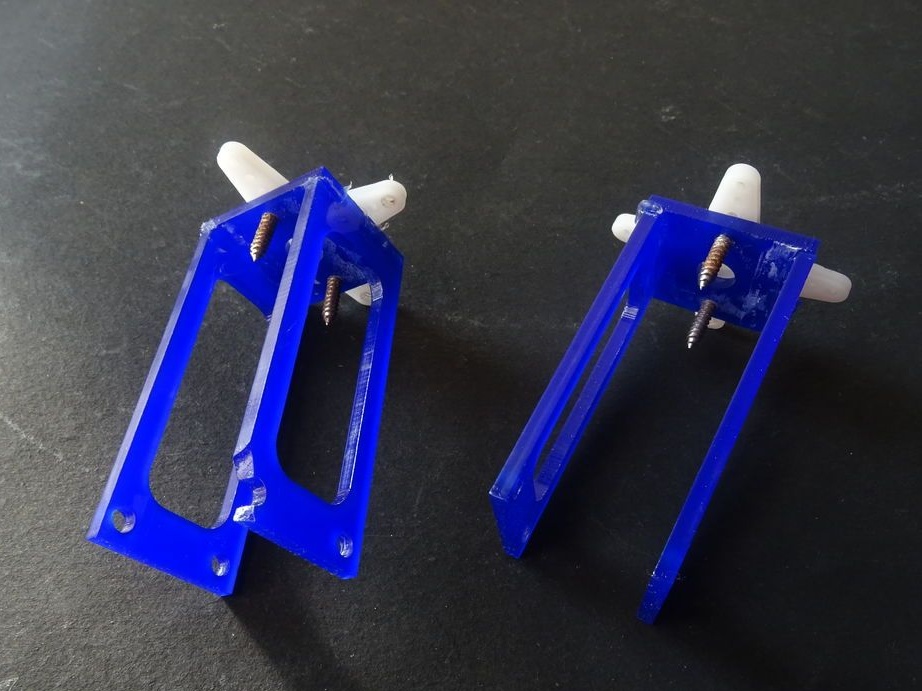
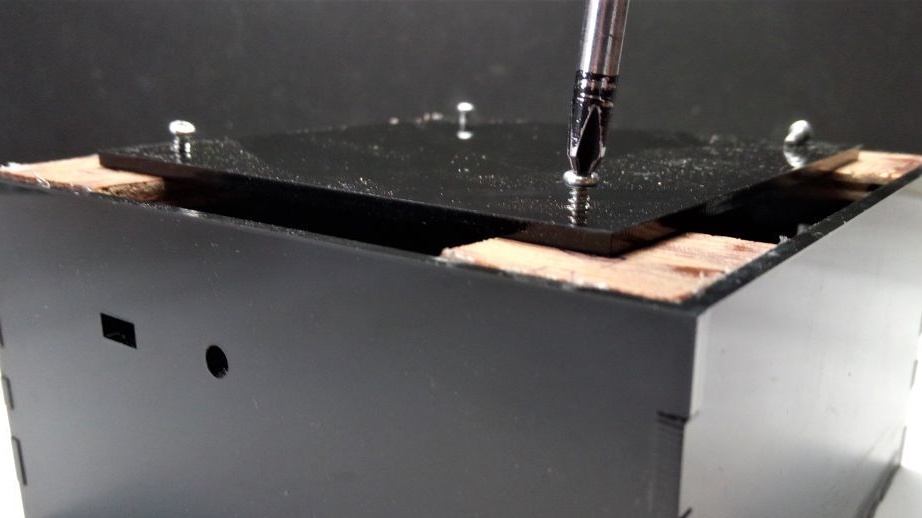
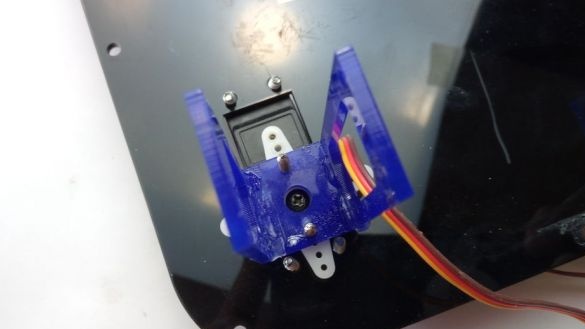
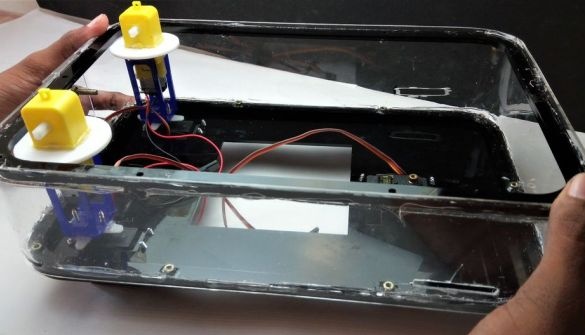
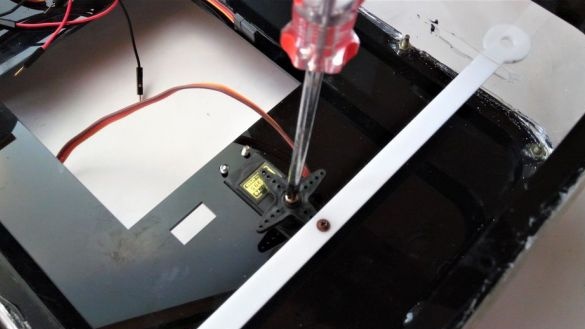
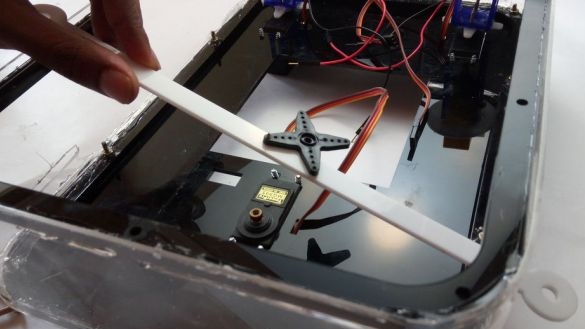
Langkah Tiga: Pasang Servo Motors
Kesemua tiga servomotor diskru ke platform. Dua ke belakang dan satu ke depan.

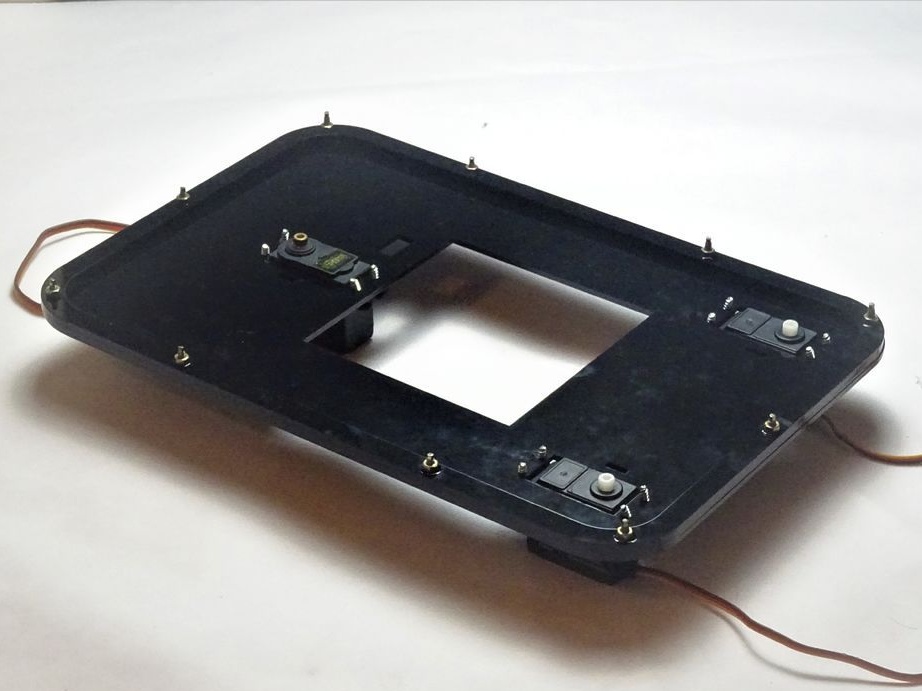
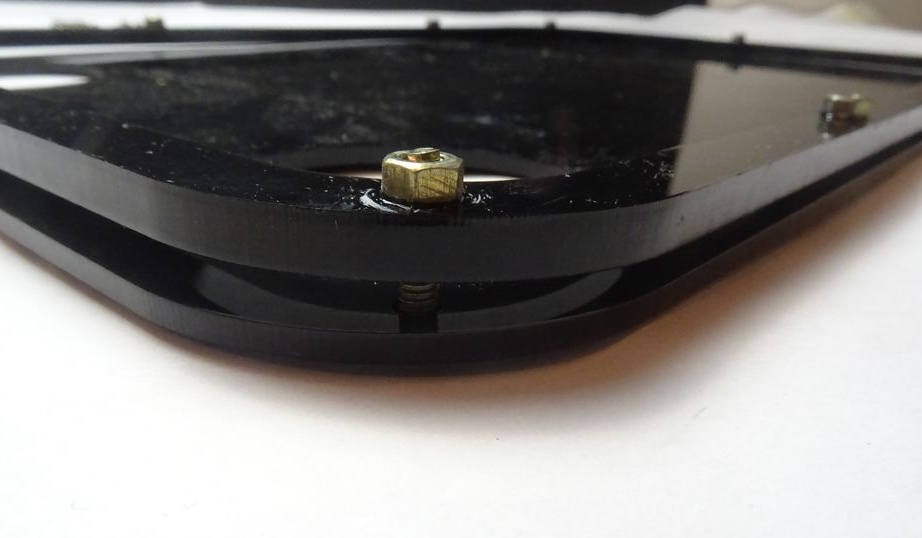
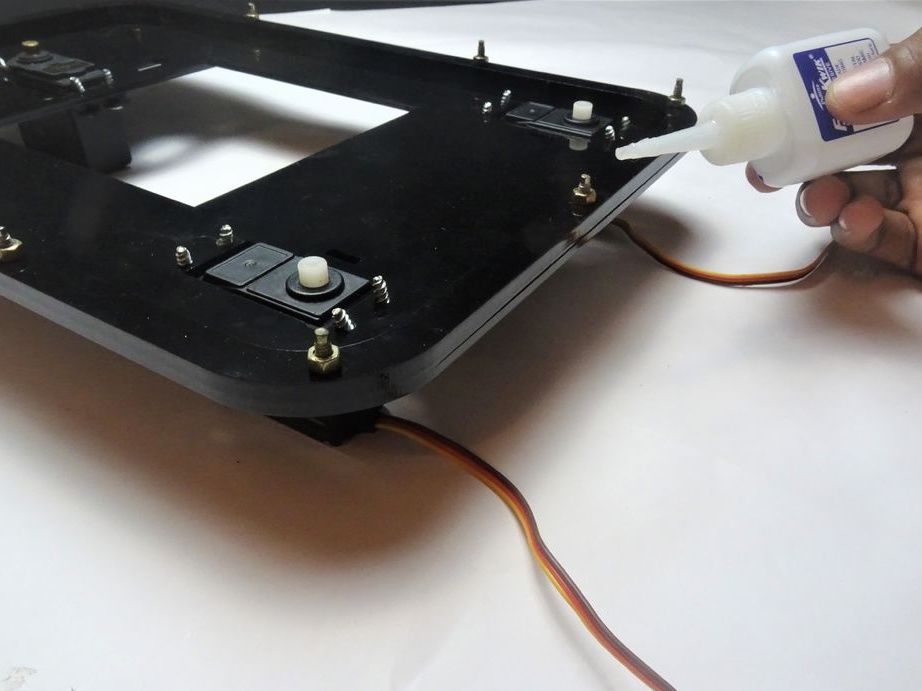
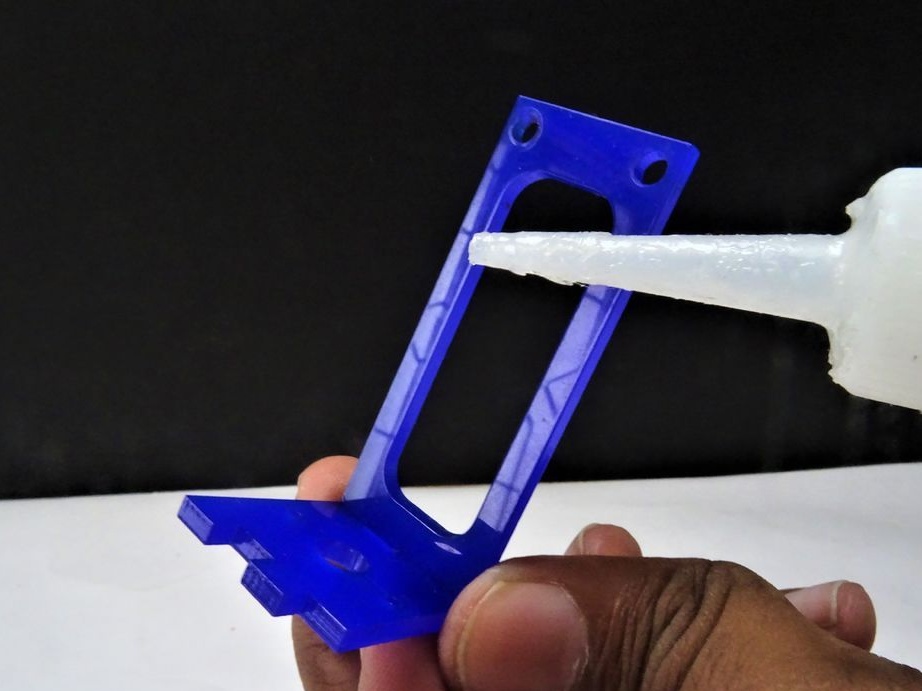
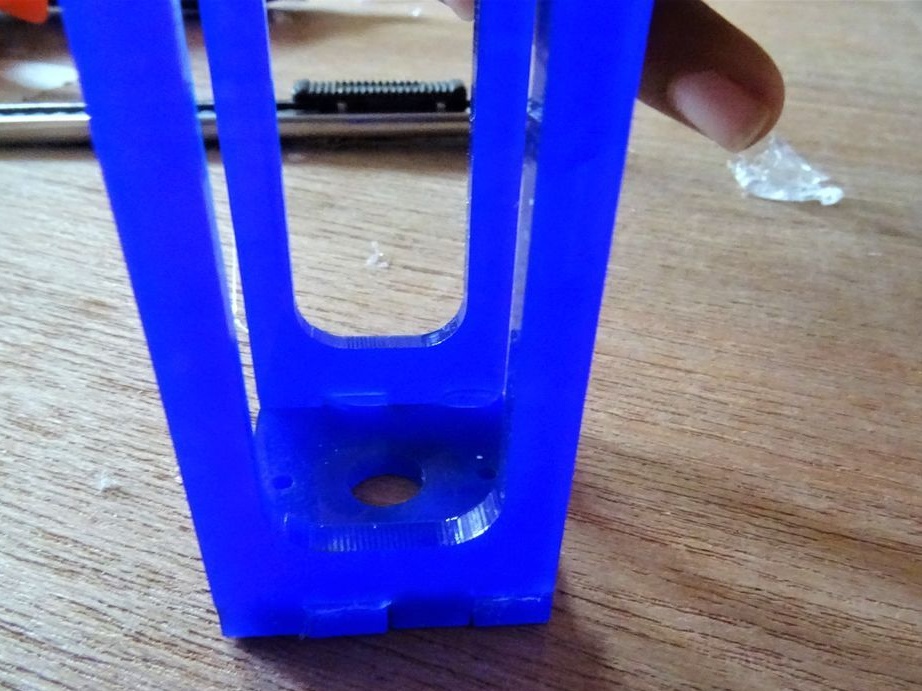
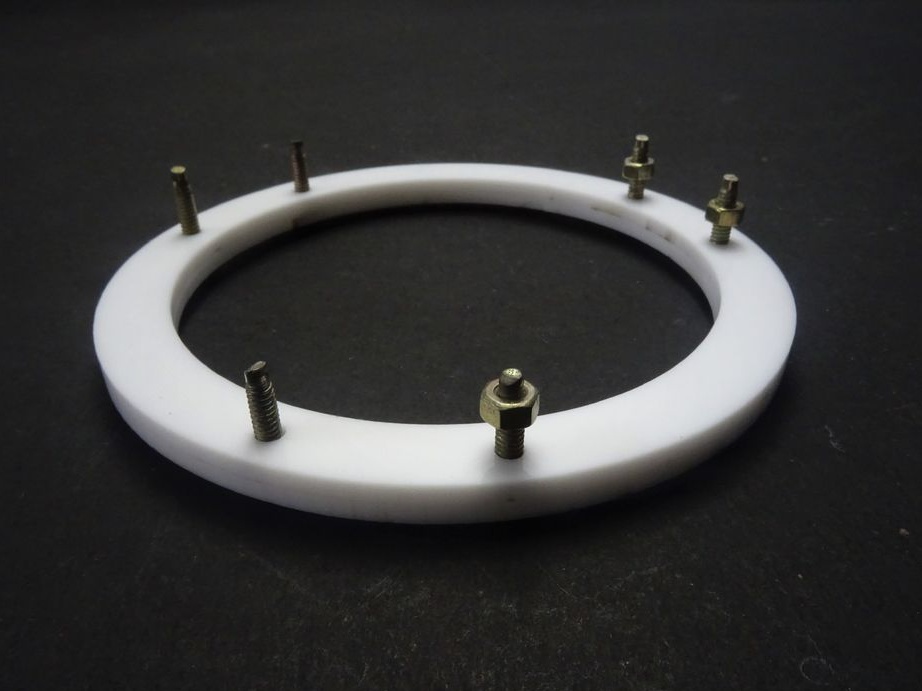
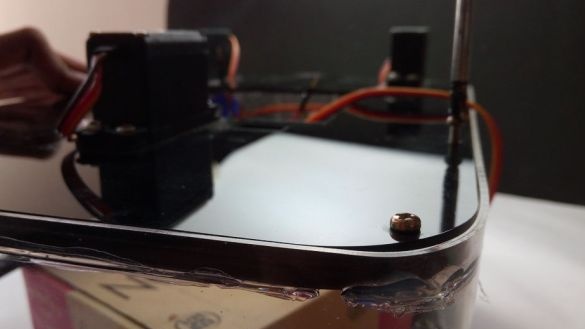
Langkah Empat: Kacang
Untuk akses ke mekanisme, bahagian atas dan bawah digerakkan bersama. Melekat kacang pada superglue ke kerangka, dan kemudian memperkuatnya dengan epoksi.


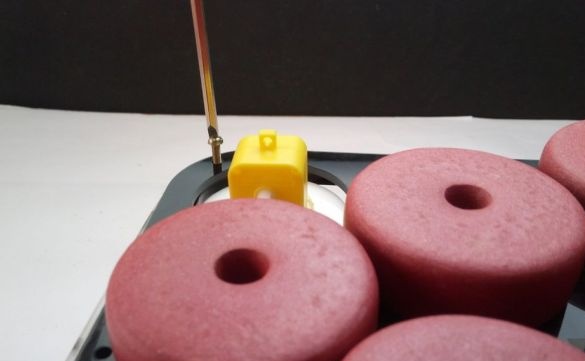
Langkah Lima: Terapung
Glue floats.



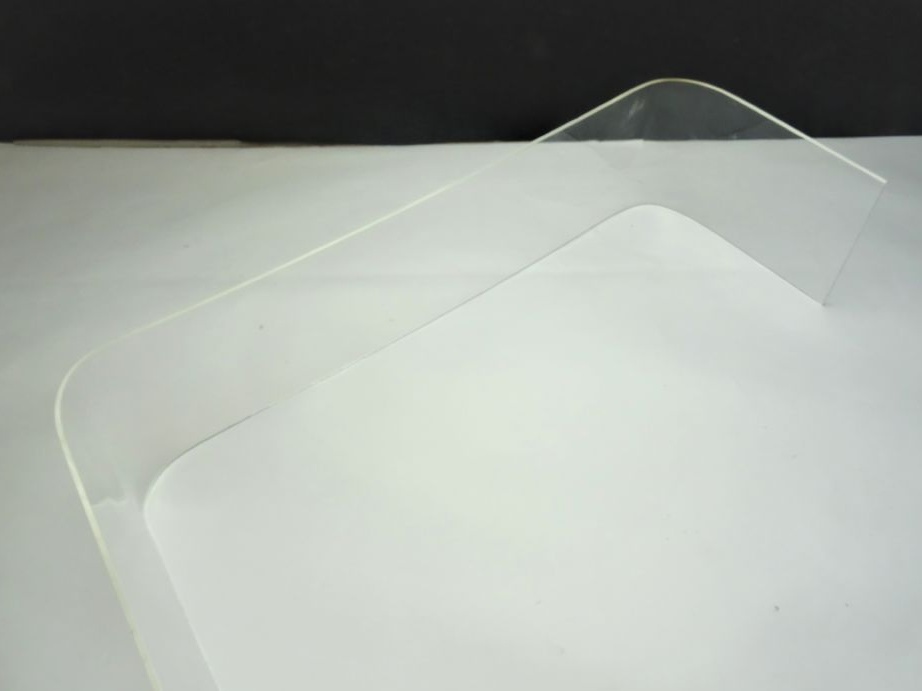
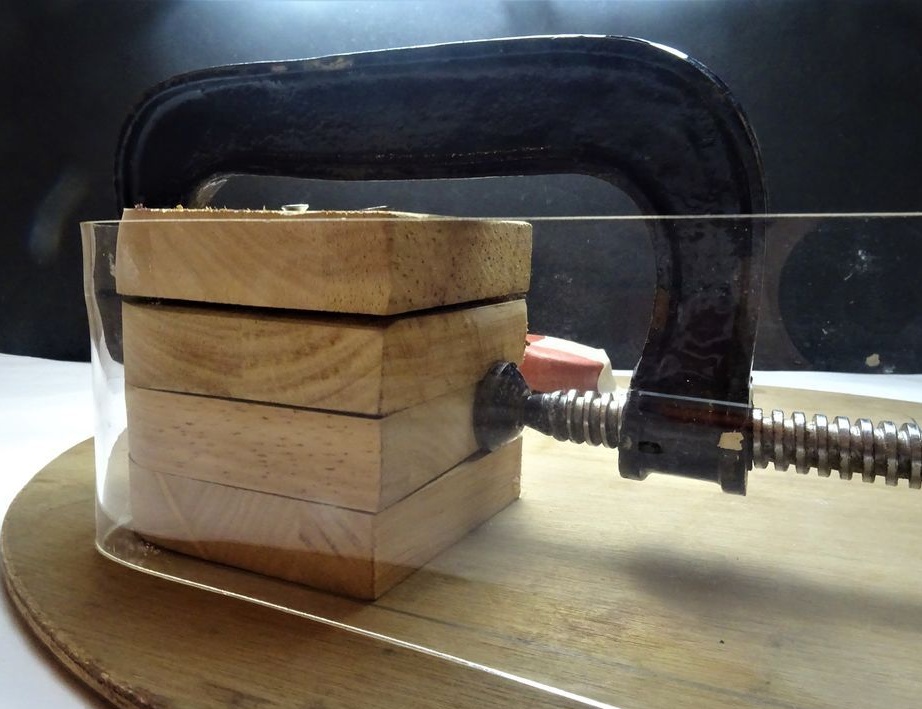
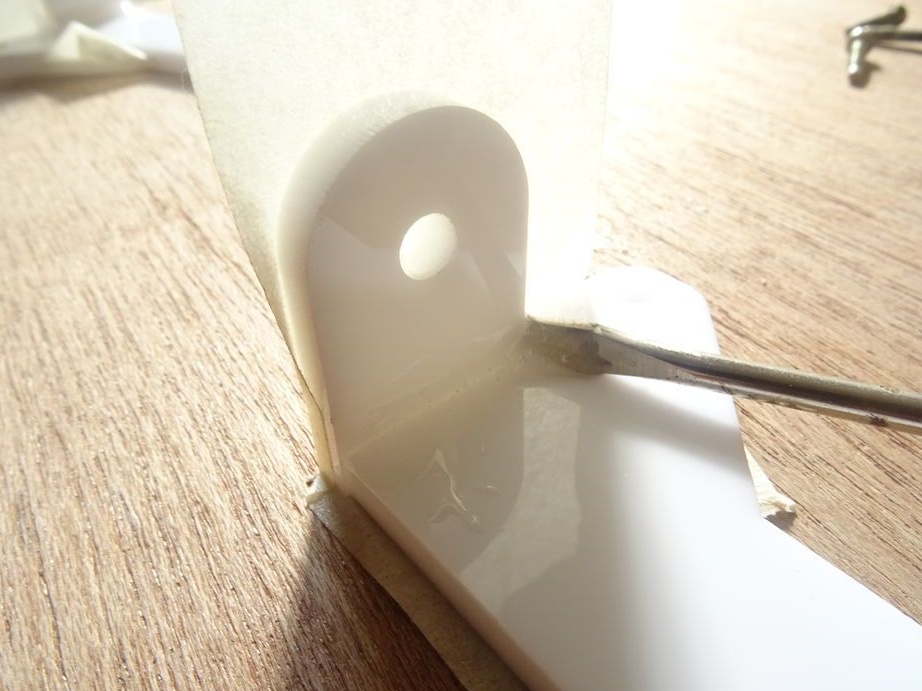
Langkah Enam: Membentuk Akrilik
Untuk membengkokkan akrilik, seorang tukang membuat templat dari kayu.



Dia mengetatkan bahagian dengan pengapit dan, memanaskannya dengan pengering rambut, memberikan bahagian yang dikehendaki.





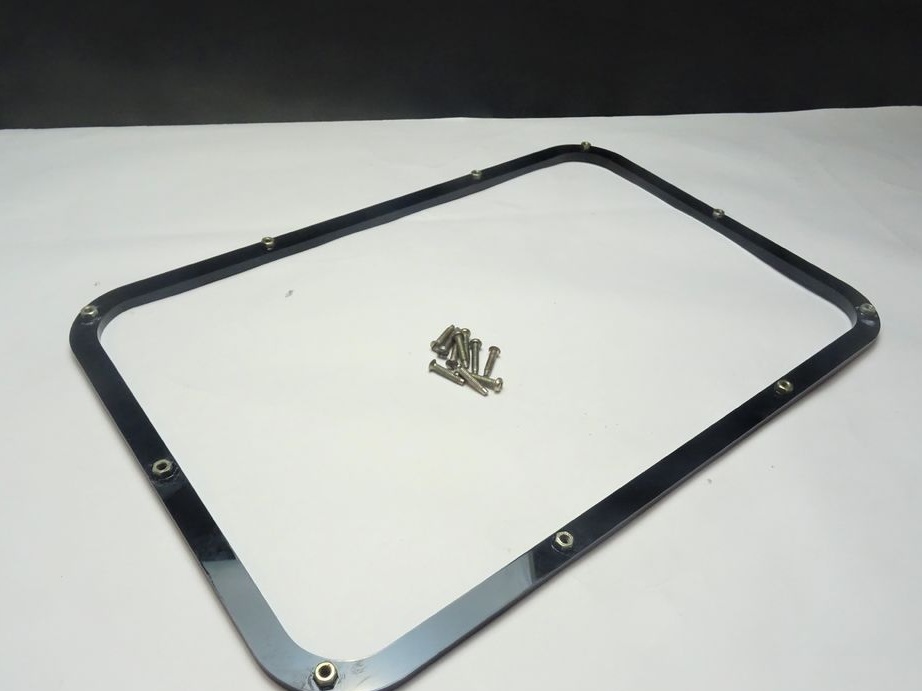
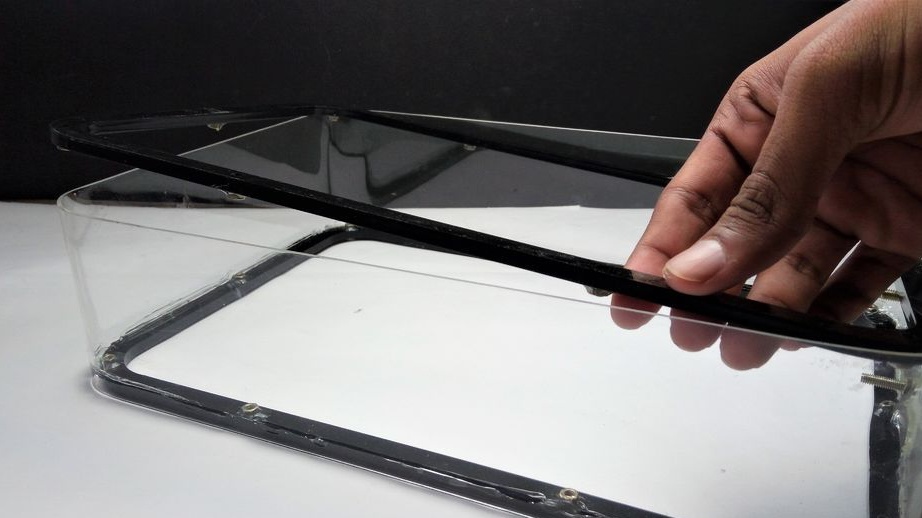
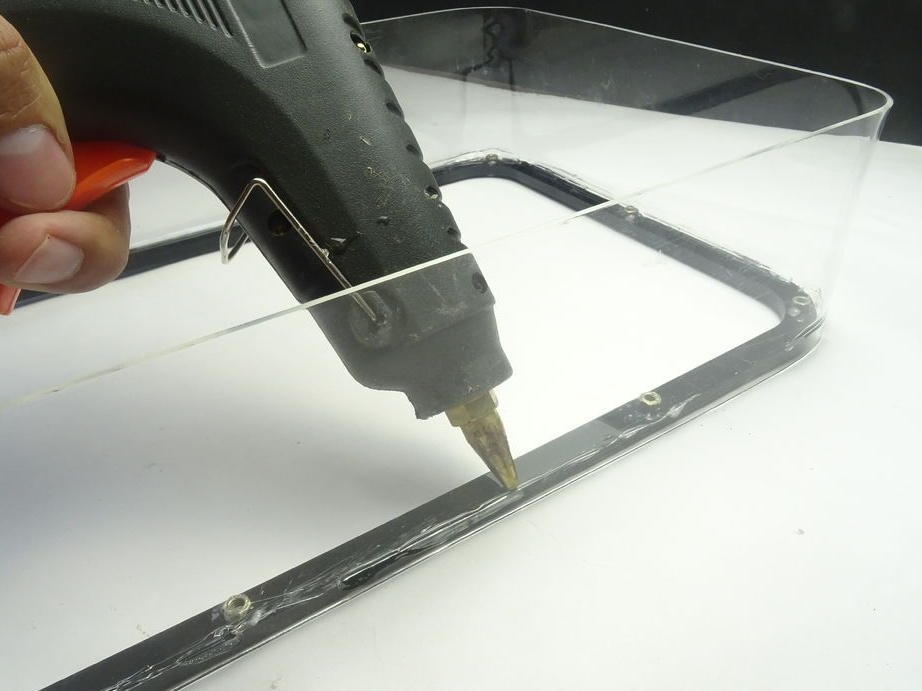
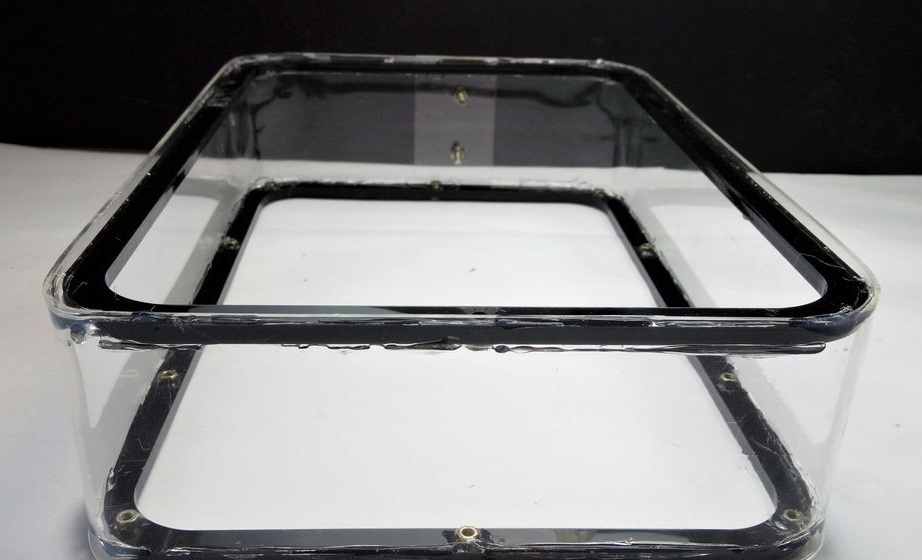
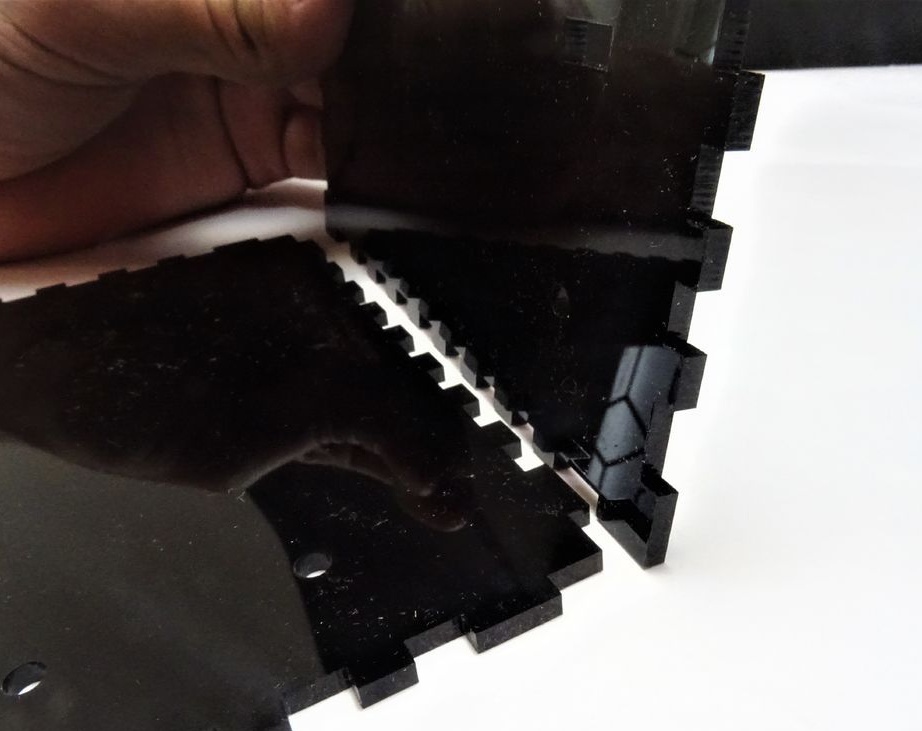
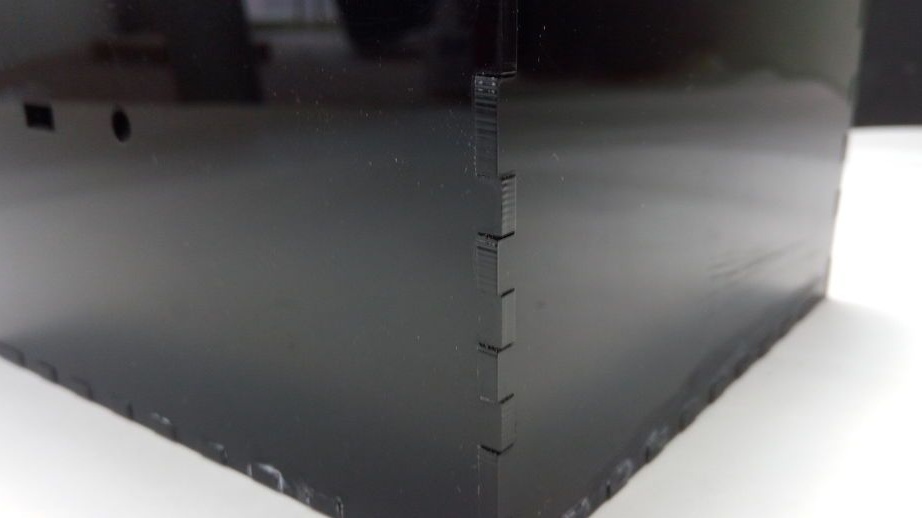
Langkah ketujuh: rangka kerja
Melekatkan bingkai atas dan bawah ke badan telus. Jahitan ditutup rapat dengan gam panas.







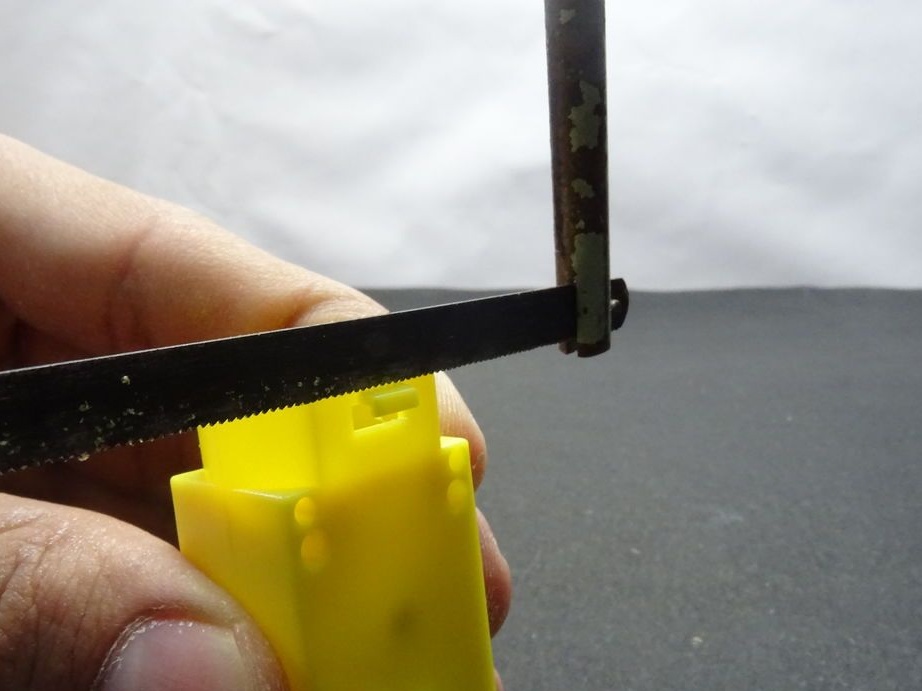
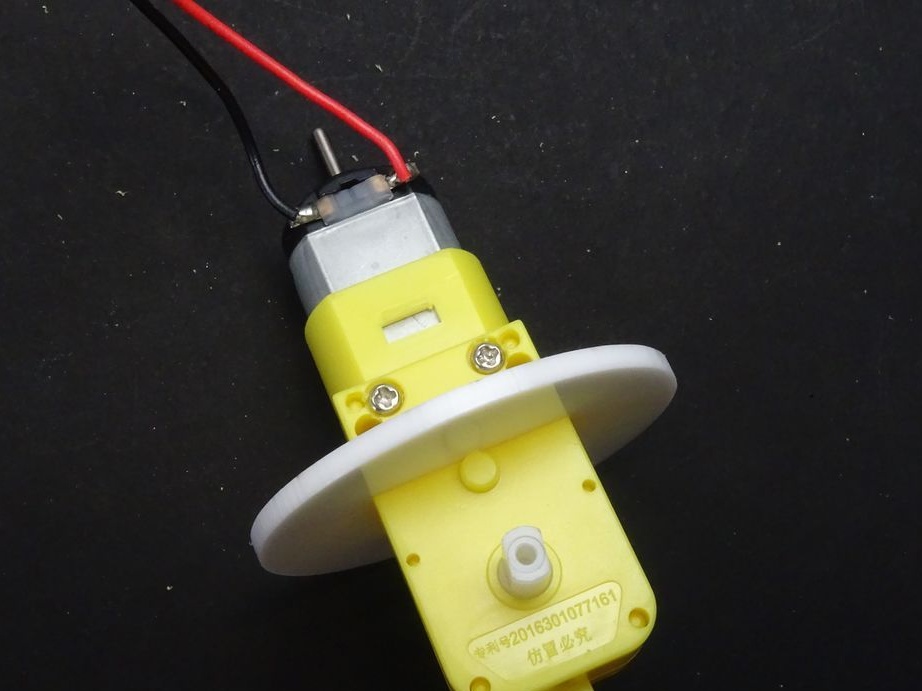
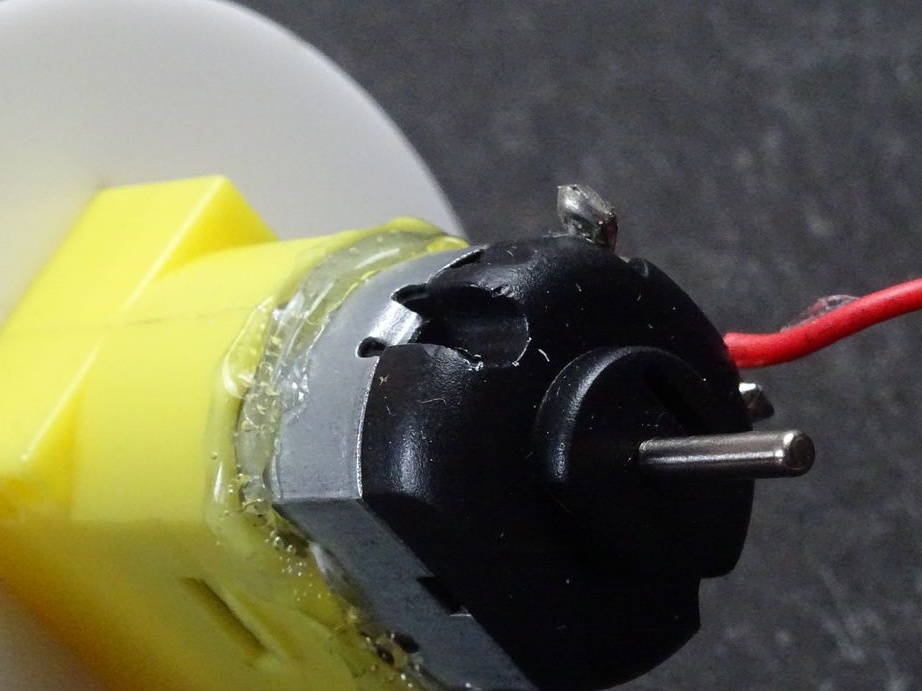
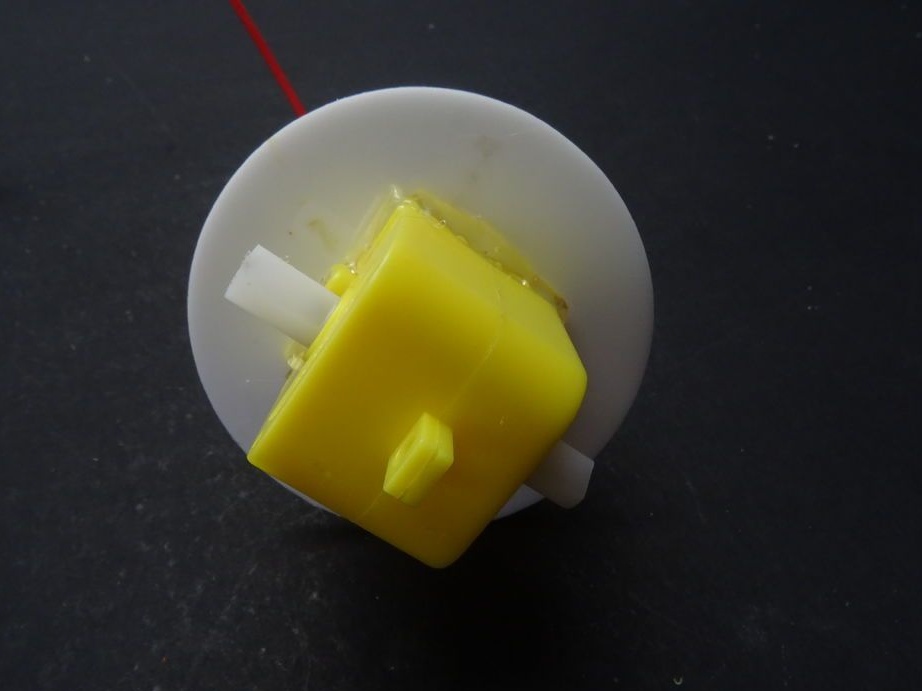
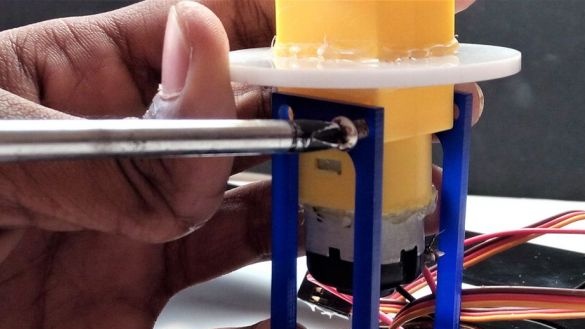
Langkah Lapan: Penalaan Enjin
Kini anda perlu memproses sarung enjin untuk memasang bahagian di atasnya.
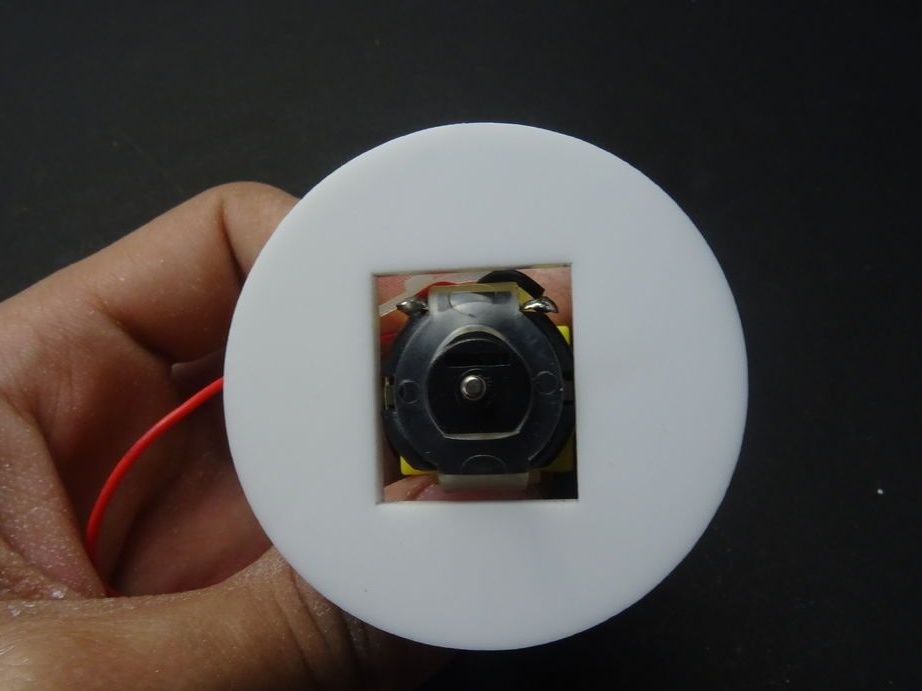
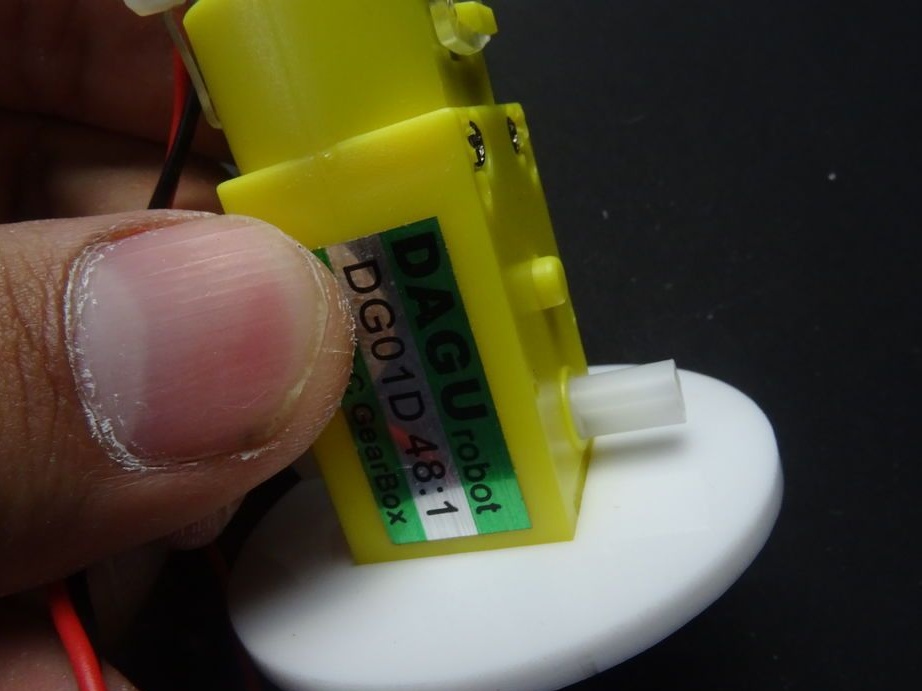

Memotong semua bahagian menonjol dari badan, sehingga pelekat.
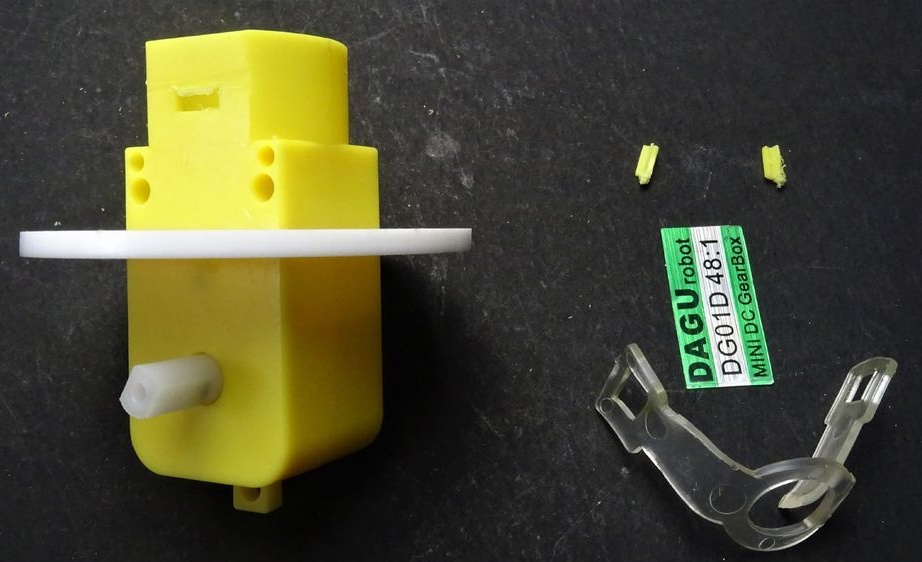

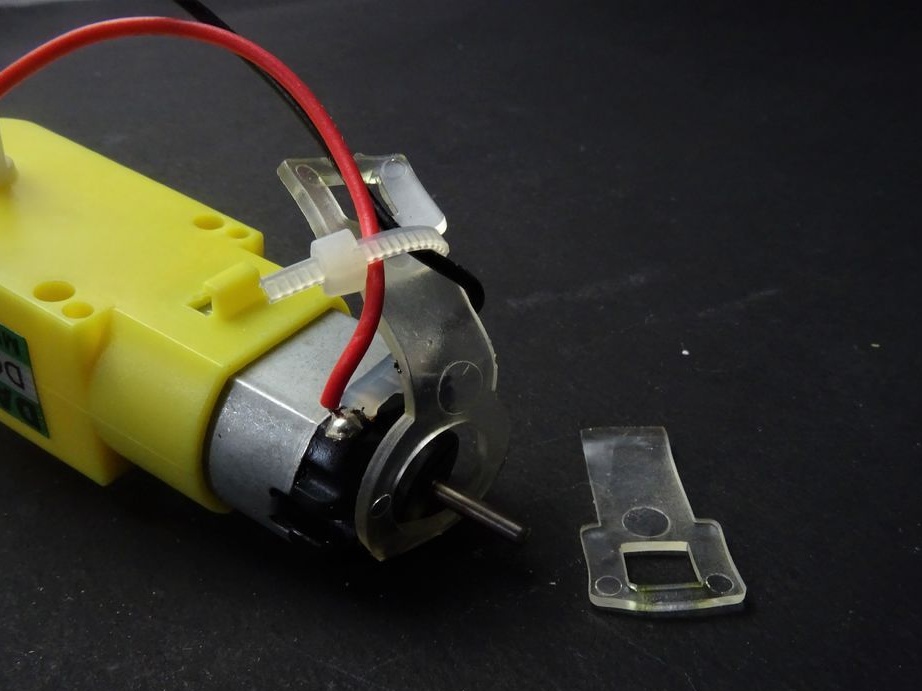


Memasang bahagian pada badan dan melekatkannya. Memandangkan perlu untuk memotong lekapan enjin (latch), enjin juga diperbaiki dengan gam.

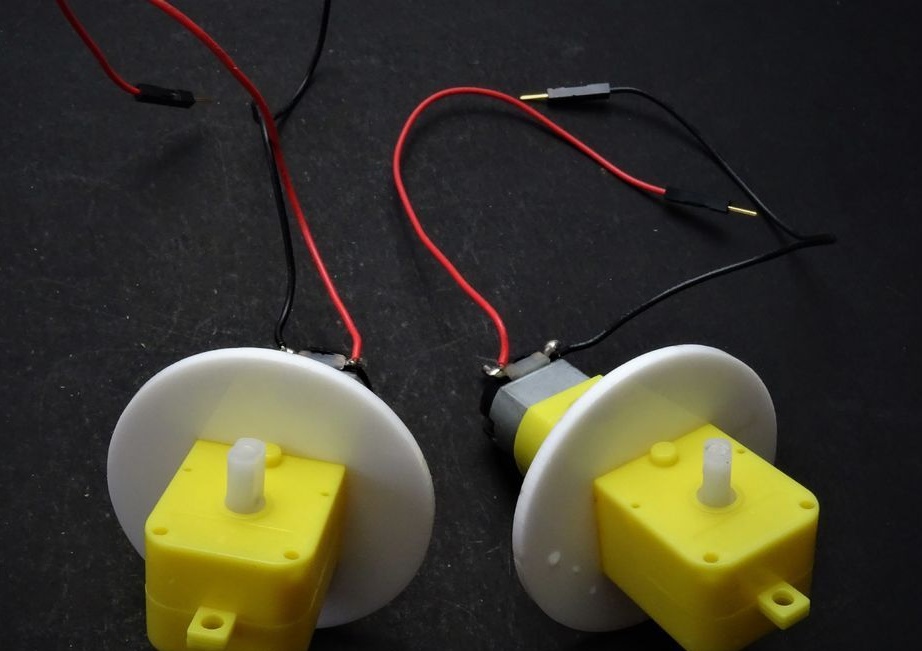

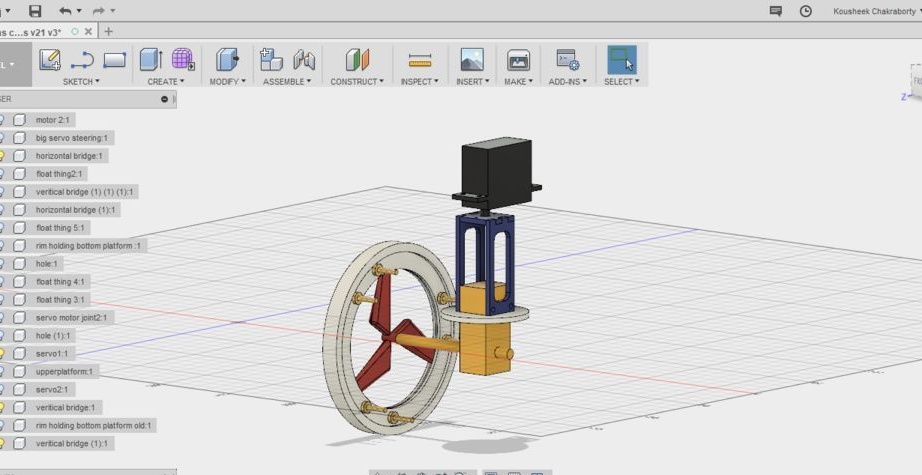
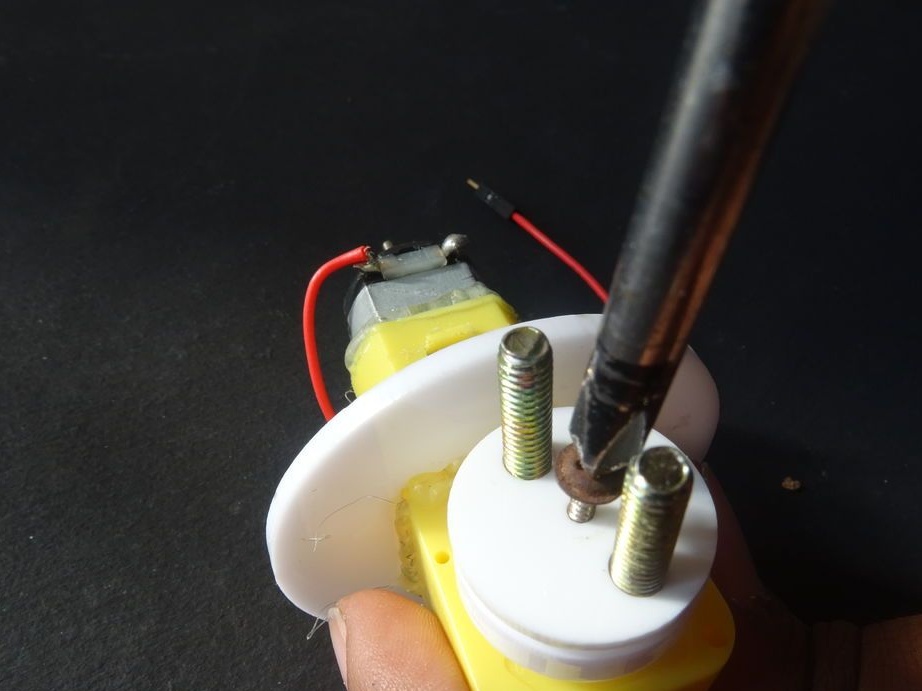
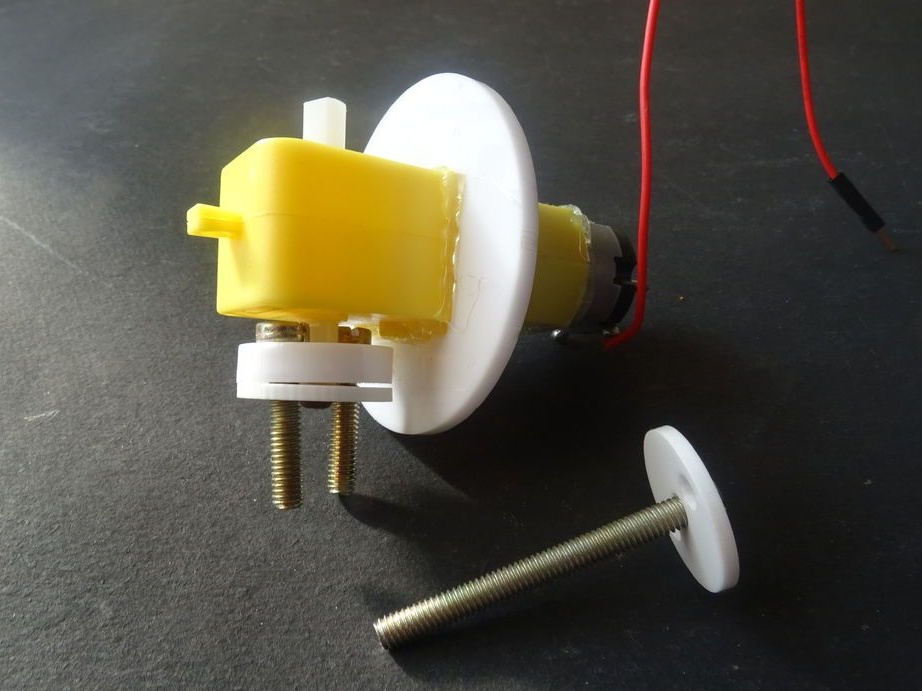
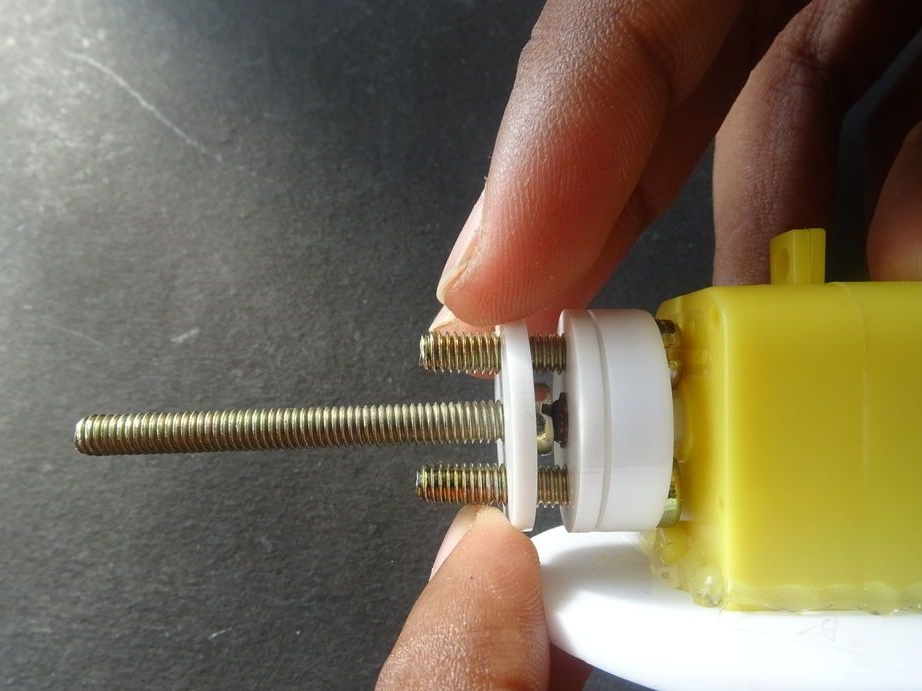
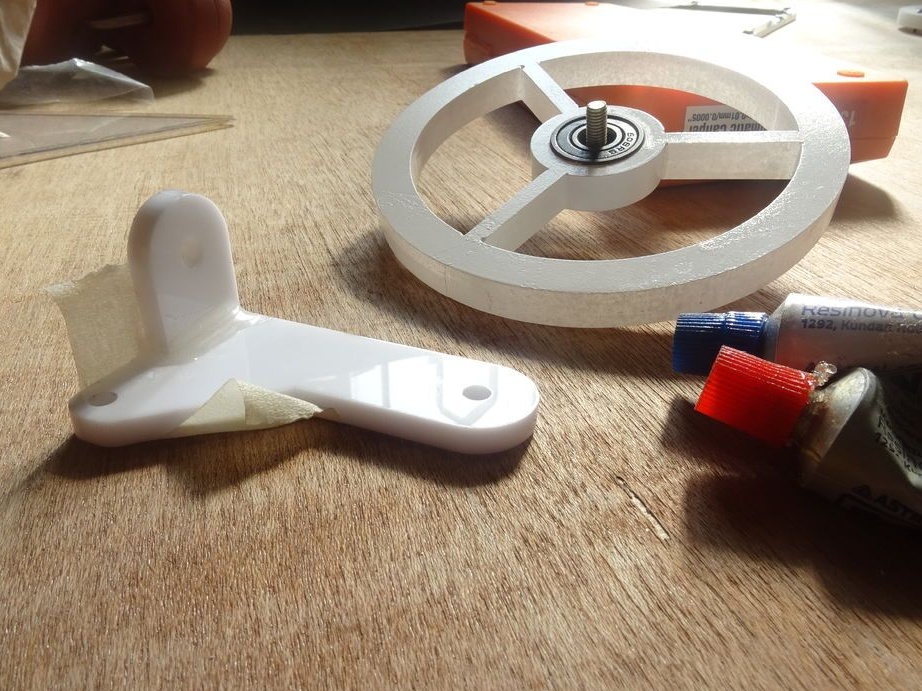
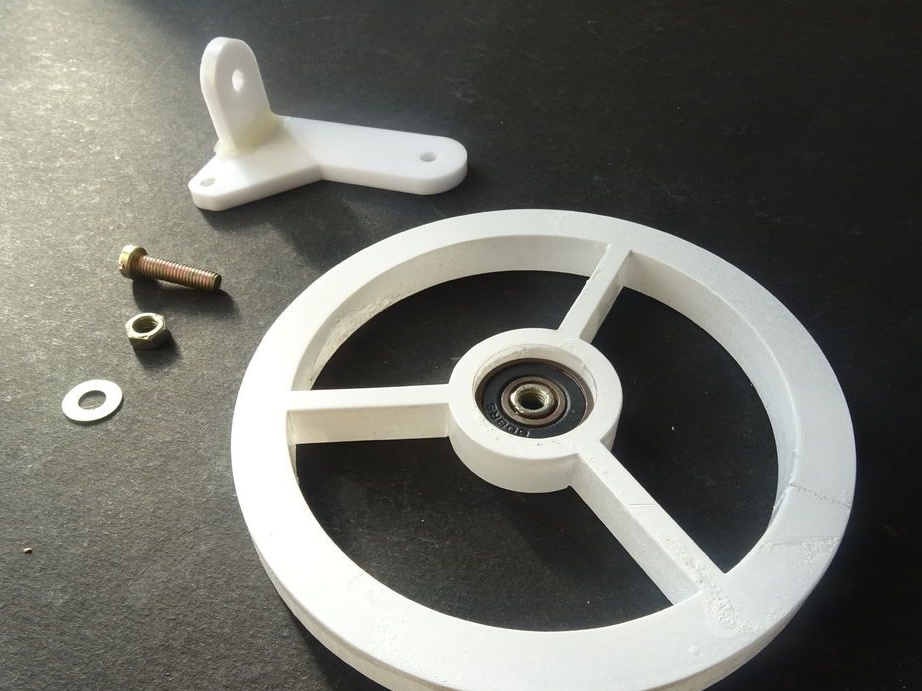
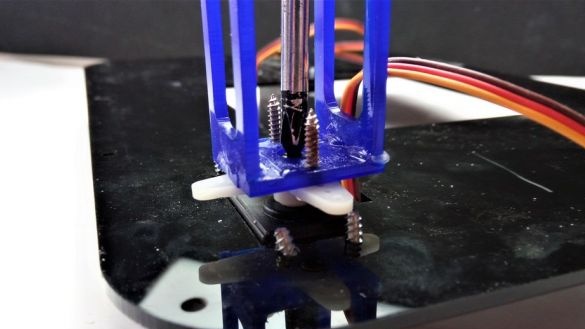
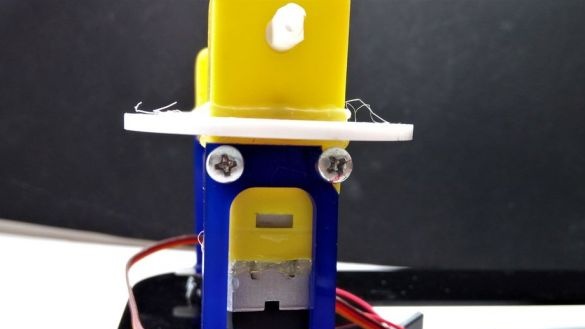
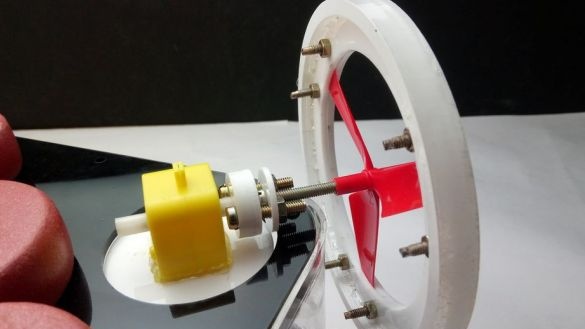
Langkah Sembilan: Mekanisme Pusing
Memasang perumahan berputar. Sebuah enjin akan dipasang di dalamnya, dan ia akan bersambung ke pemacu servo.
Perekat kes ini.

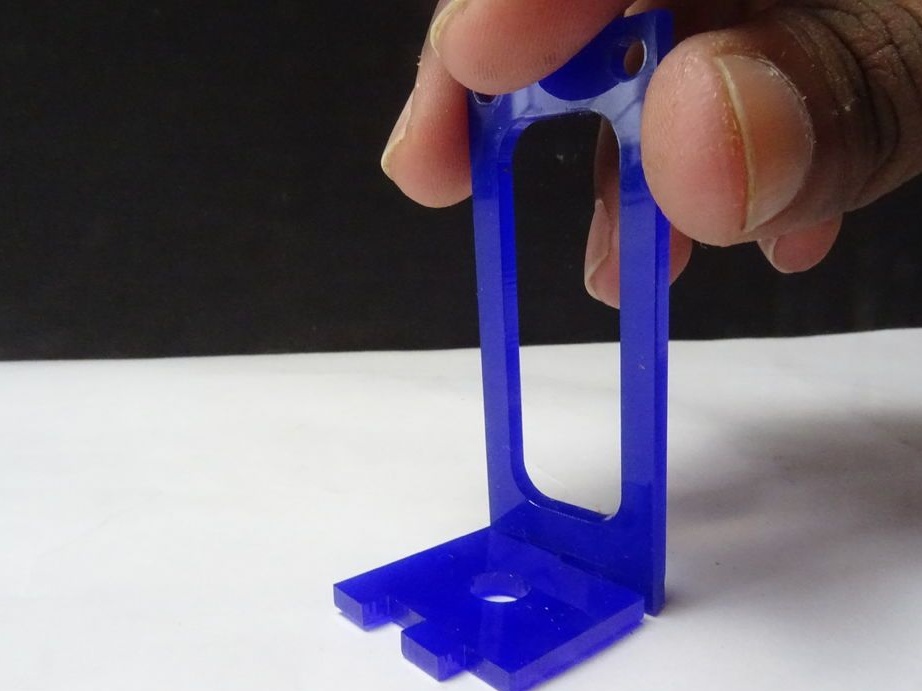

Skru pada coupler.


Langkah Sepuluh: Lukisan
Oleh kerana tuan tidak mempunyai akrilik putih ketebalan yang diperlukan, roda dan rim dipotong daripada akrilik telus dan kemudian dicat putih.




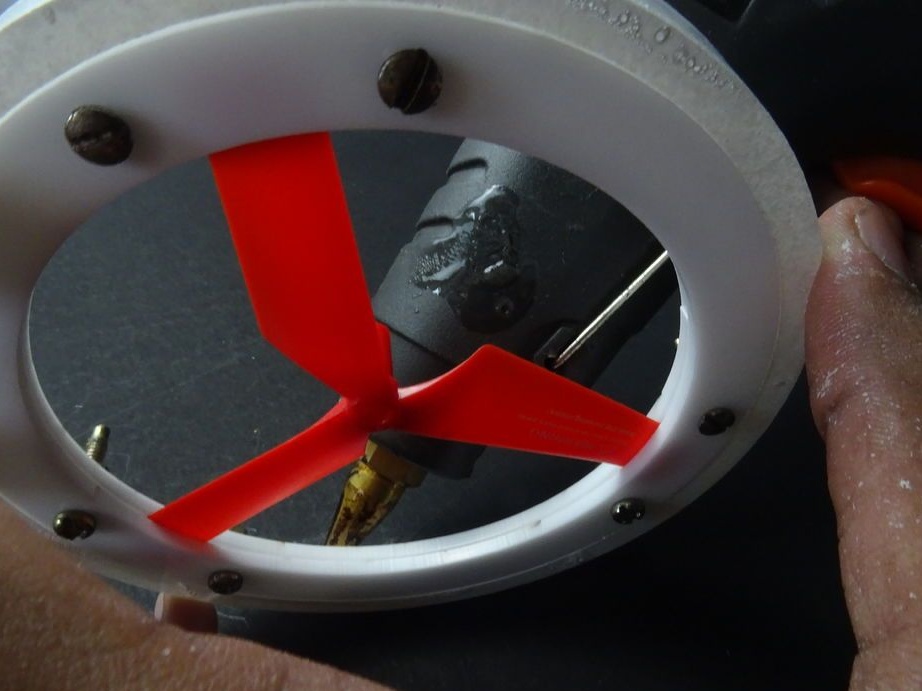
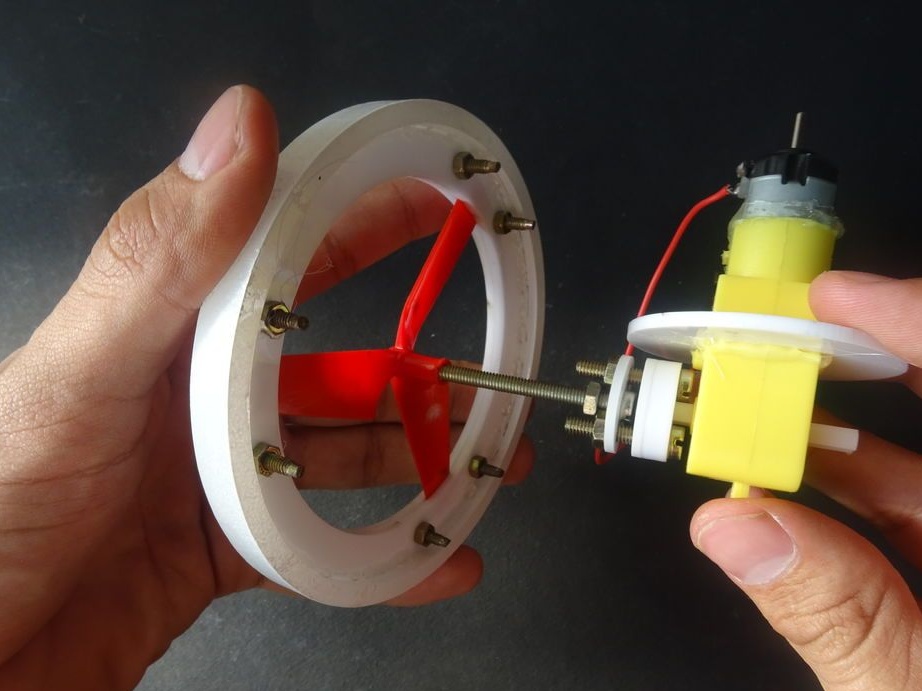
Langkah Eleven: Pemasangan Roda
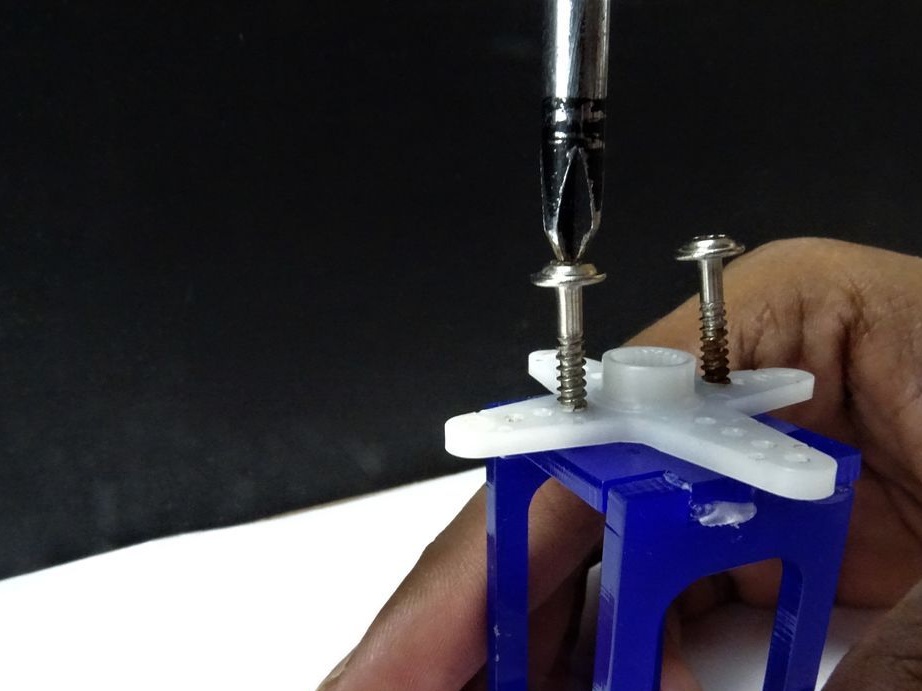
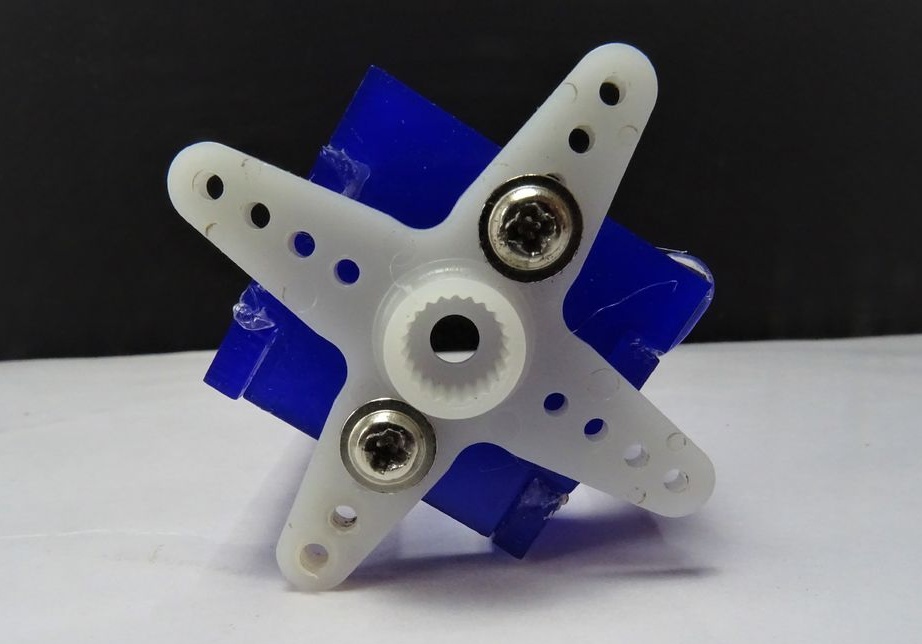
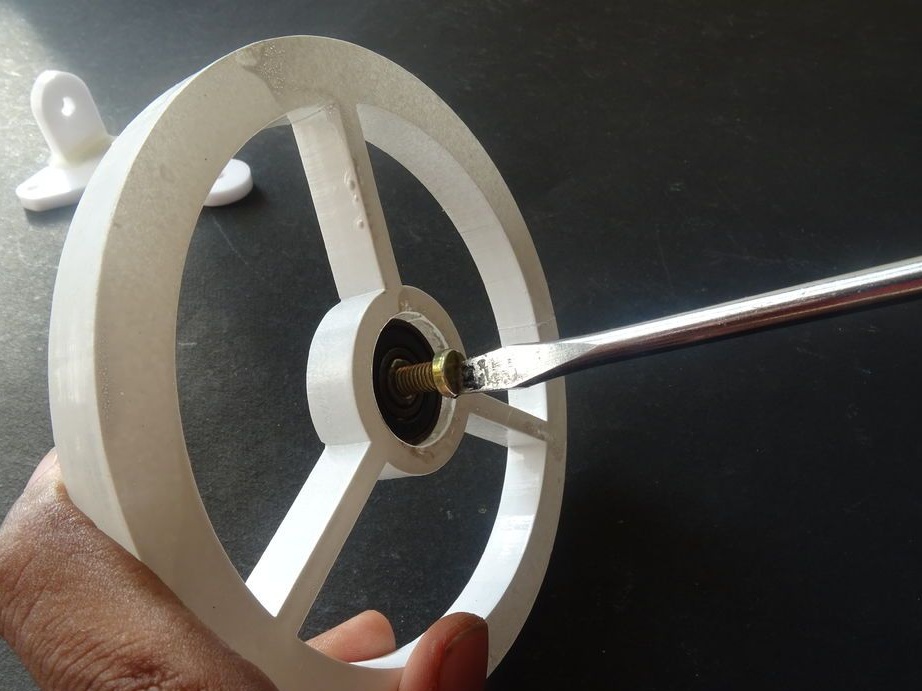
Pada bolt mengumpul dua roda roda. Sekrup tidak diketatkan sepenuhnya.




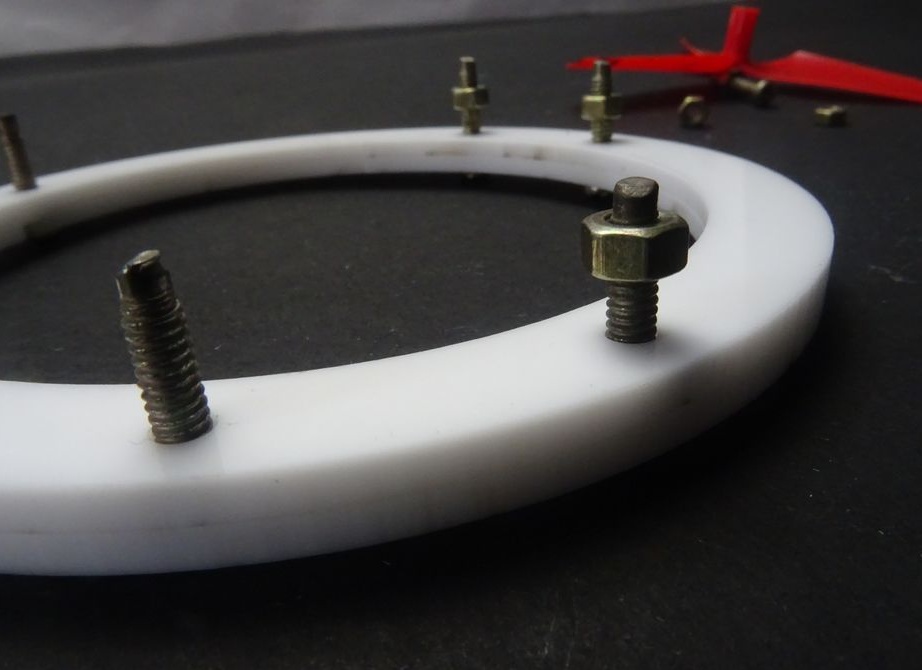
Antara cakera memasang skru dan mengetatkan skru. Apabila memasang skru, anda mesti menggunakan template untuk memusatkannya.
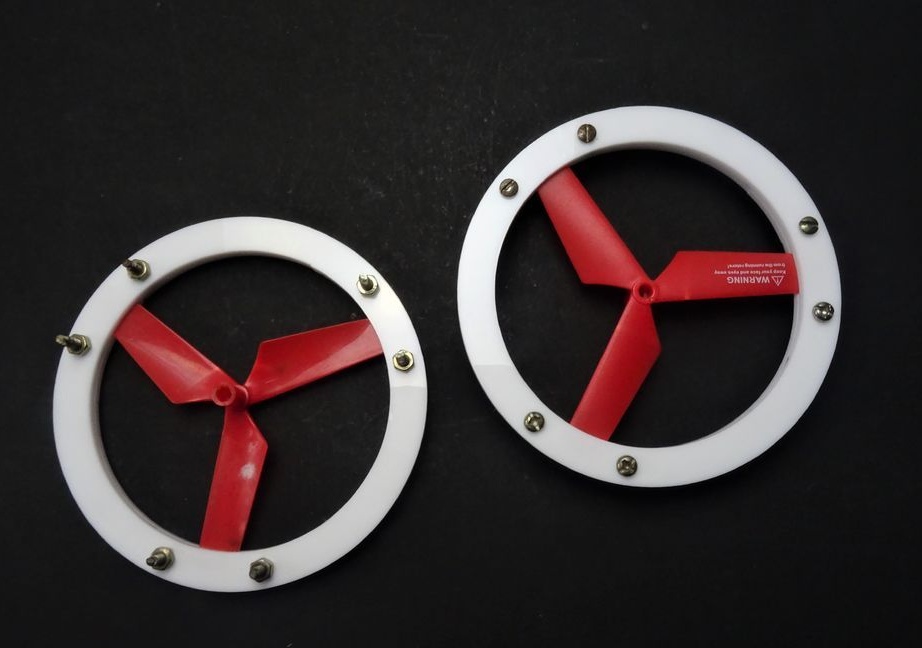
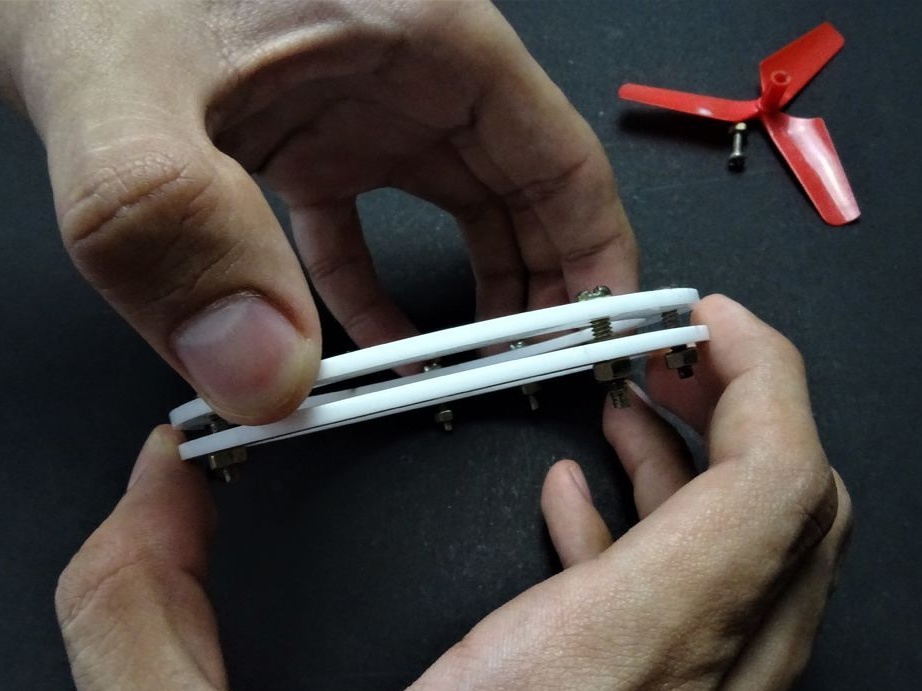
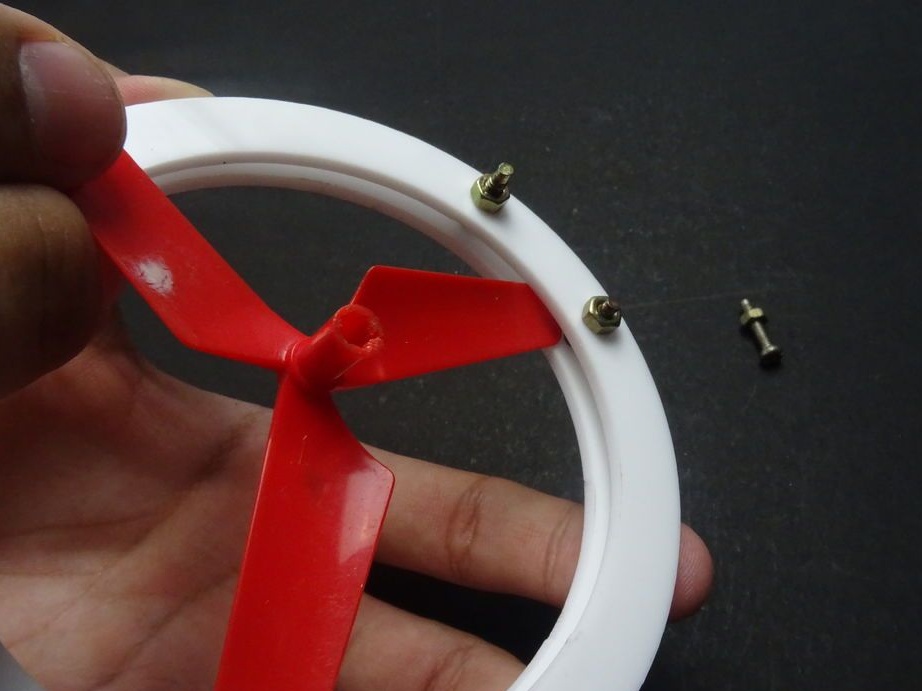
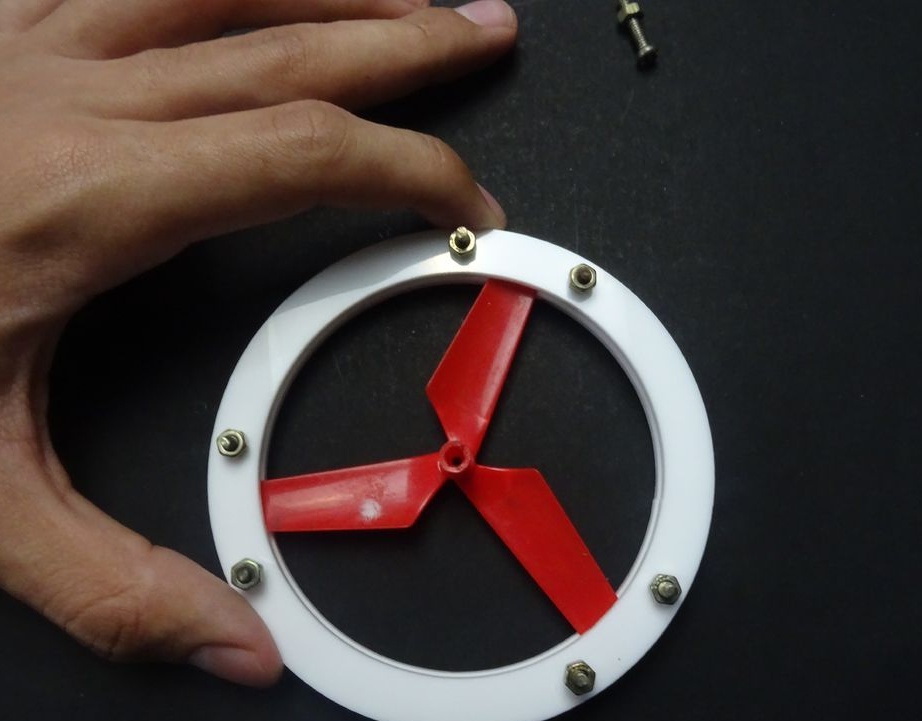
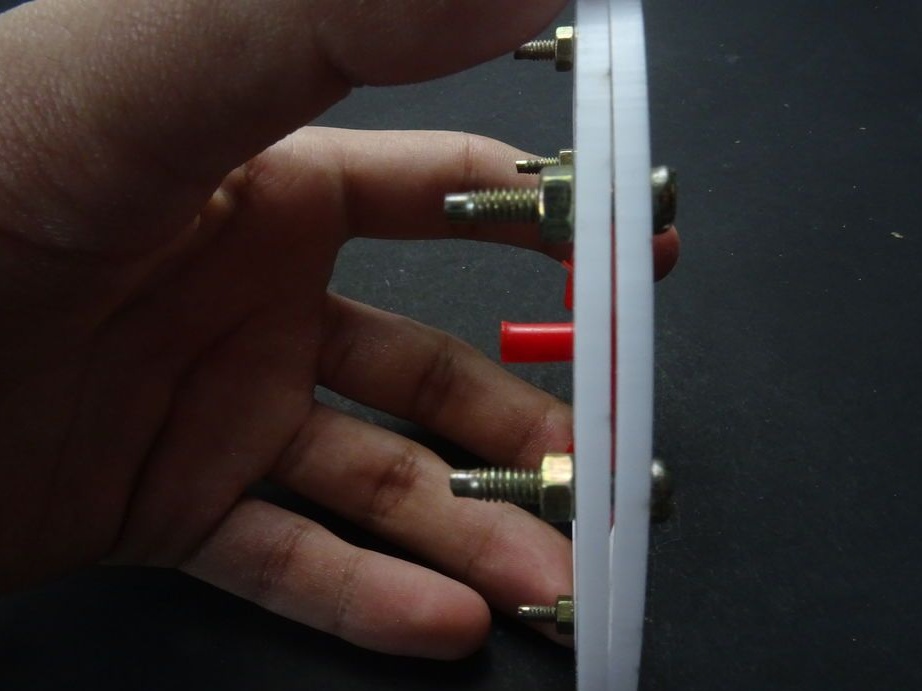

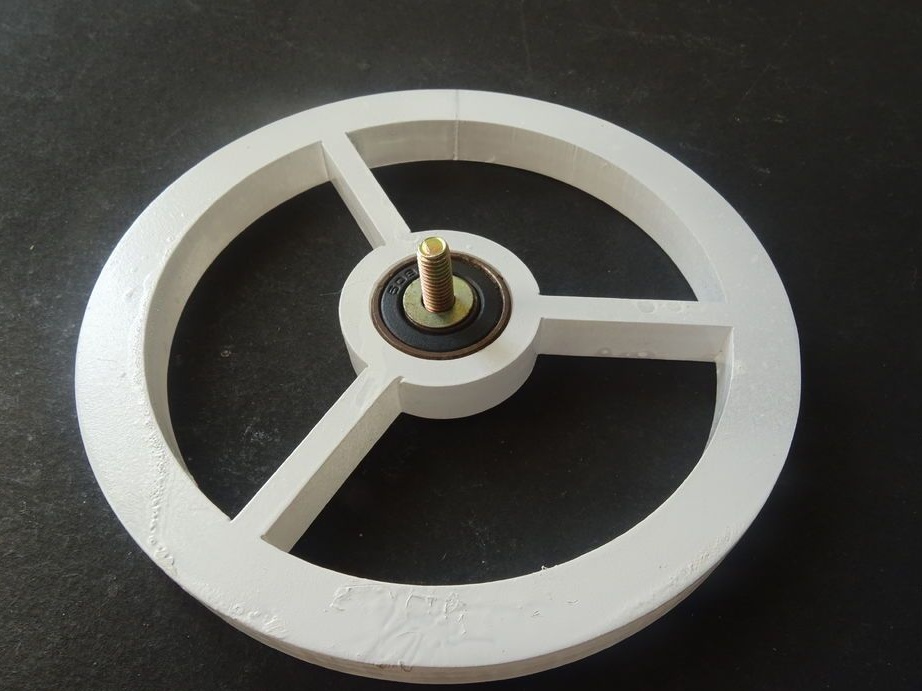
Menetapkan roda luar roda. Rim mesti disiram dengan cakera dalaman.
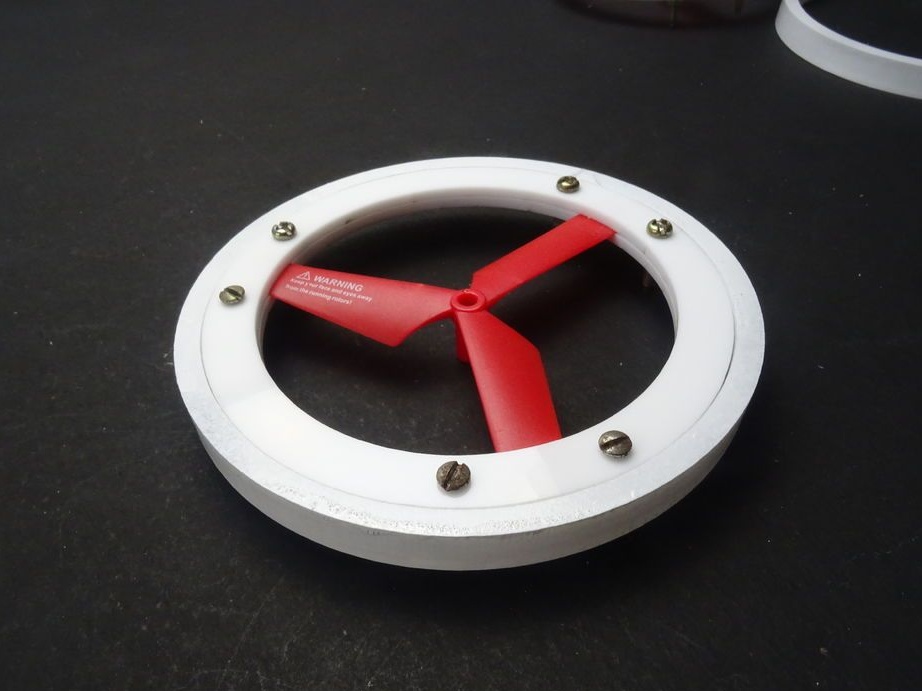

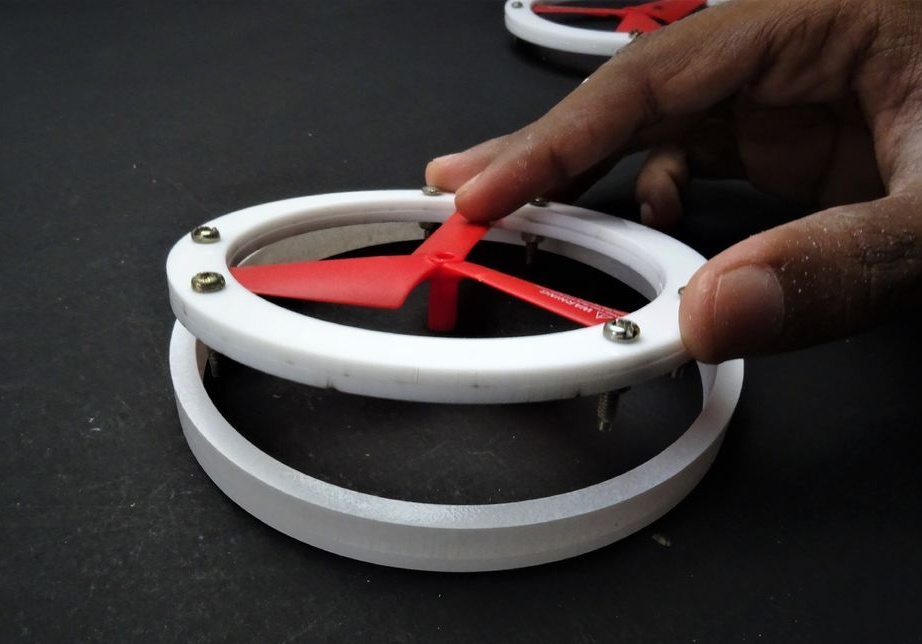
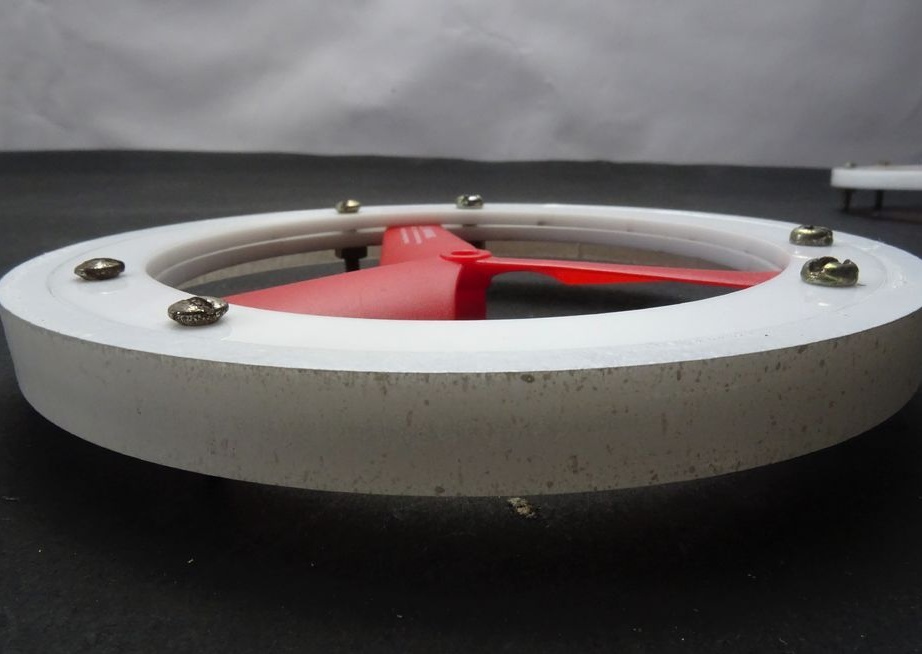

Sapukan gam panas ke sendi.


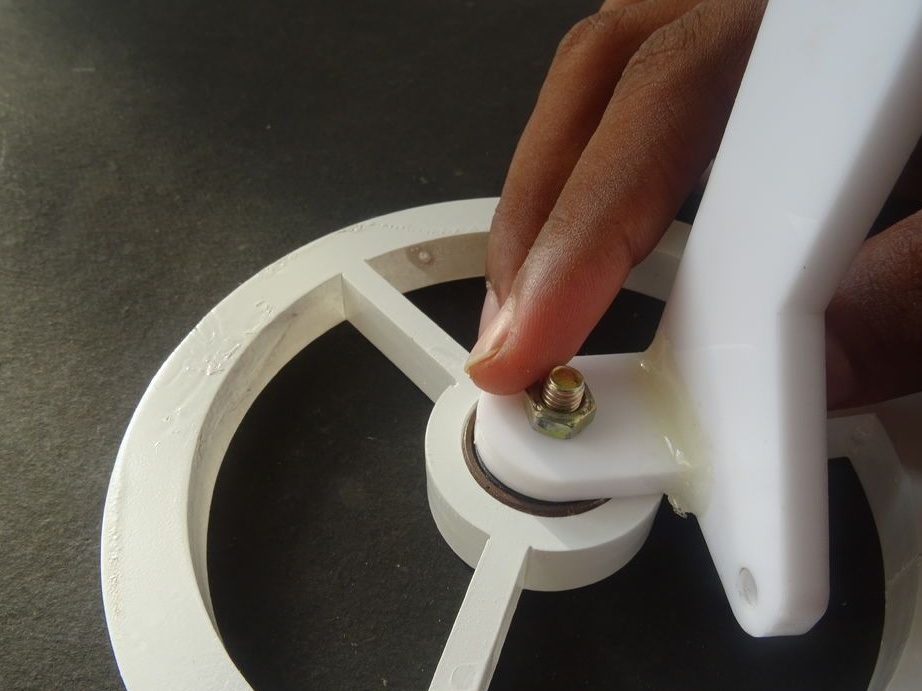
Kini mengumpul roda depan.
Kacang yang berukuran saiz yang sesuai menjadi perlumbaan dalaman galas. Tekan bantalan ke roda depan.
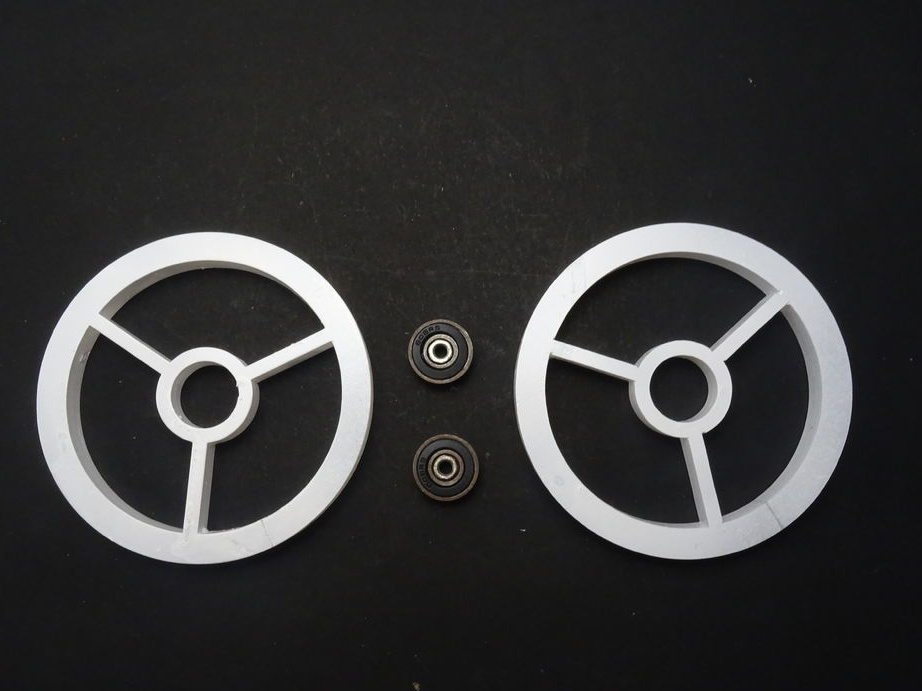



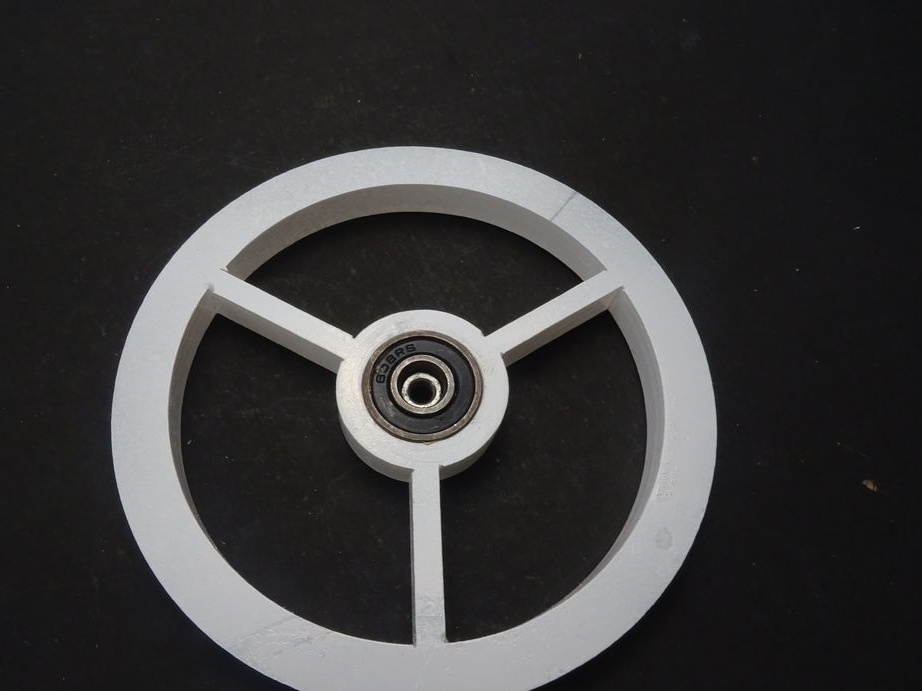
Roda sudah siap.

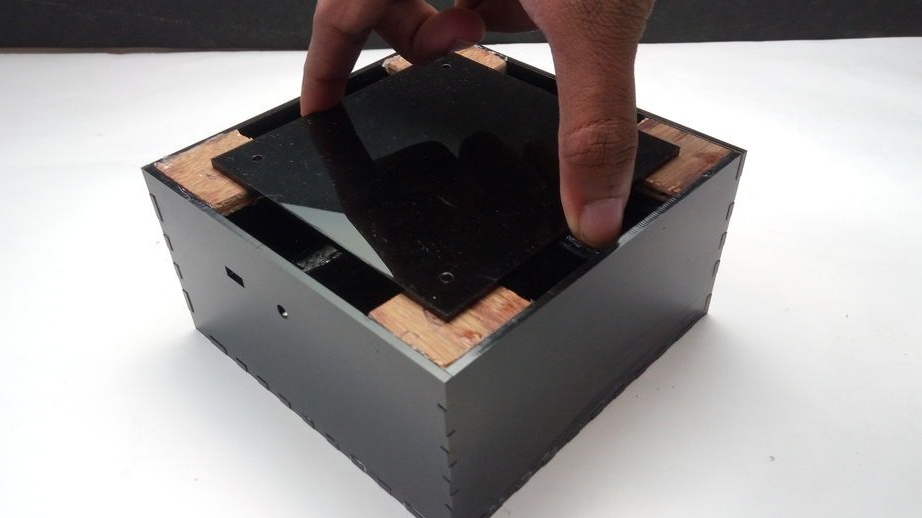
Langkah Dua Belas: Lampiran Elektronik
Memadatkan perumahan untuk elektronik.

Kotak ini akan mengandungi segala-galanya elektronik komponen, yang bermaksud ia perlu kalis air sebaik mungkin.


Empat petak dipotong dan dilekatkan dari papan di sudut kotak. Penutup kotak akan dilampirkan kepada mereka.



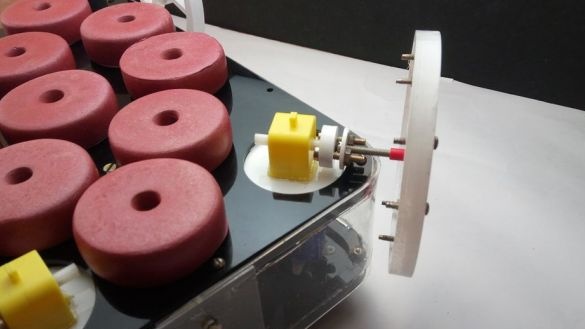
Langkah Tiga belas: Mount Wheel
Sekarang anda perlu menyambungkan roda dan gear dengan klac.





Skru depan roda untuk daya tarikan.


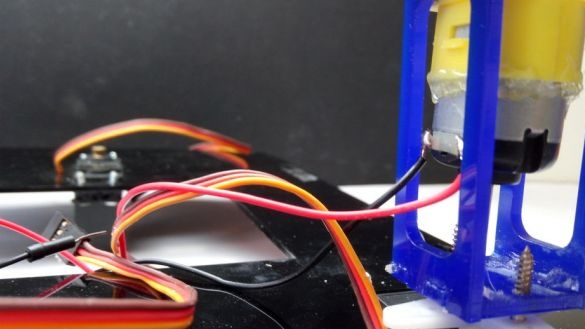
Langkah Empat belas: Sambungkan Elektronik
Menurut skema itu, ia memasang bahagian-bahagian elektrik.
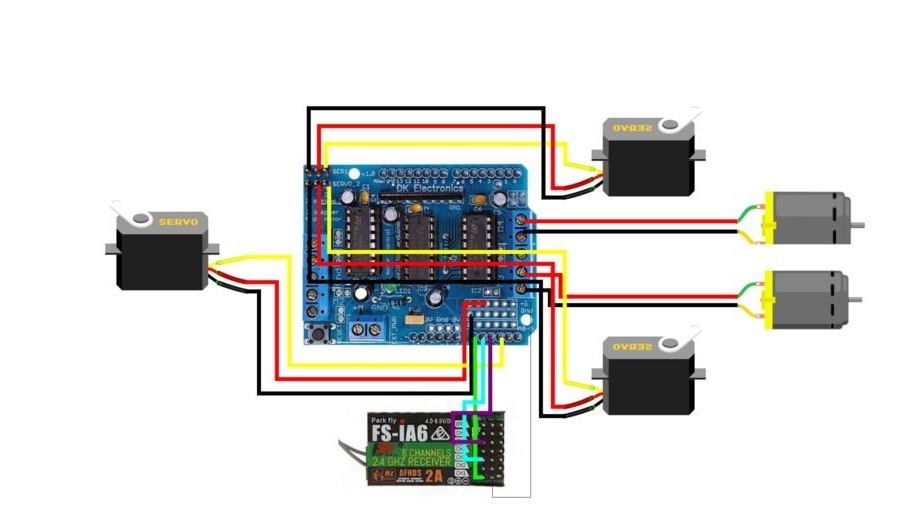

Kawat enjin kiri ke M1, hak untuk M2. Sambungkan pemandu enjin. Menyambung servos. Memasang penerima: gnd penerima kepada gnd Arduino; +5 V penerima untuk +5 V Arduino; pin 3 hingga A0; pin 1 hingga A1; pin 5 hingga A2. Sambungkan bateri.
Langkah Lima belas: Kod muat turun
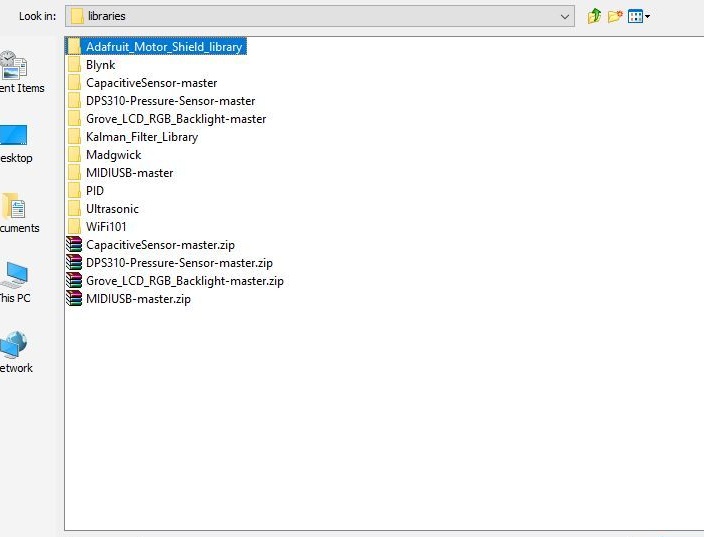
Pertama anda perlu memuat turun perpustakaan.
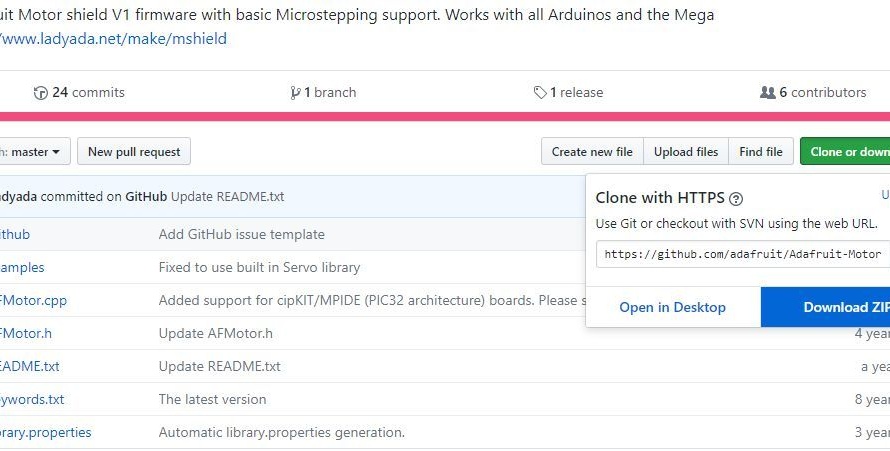
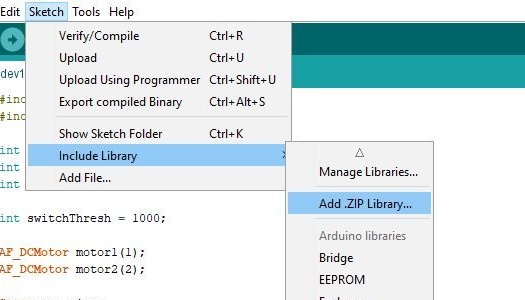
Seterusnya, muat turun kod. Apabila memuatkan, bateri perlu diputuskan.
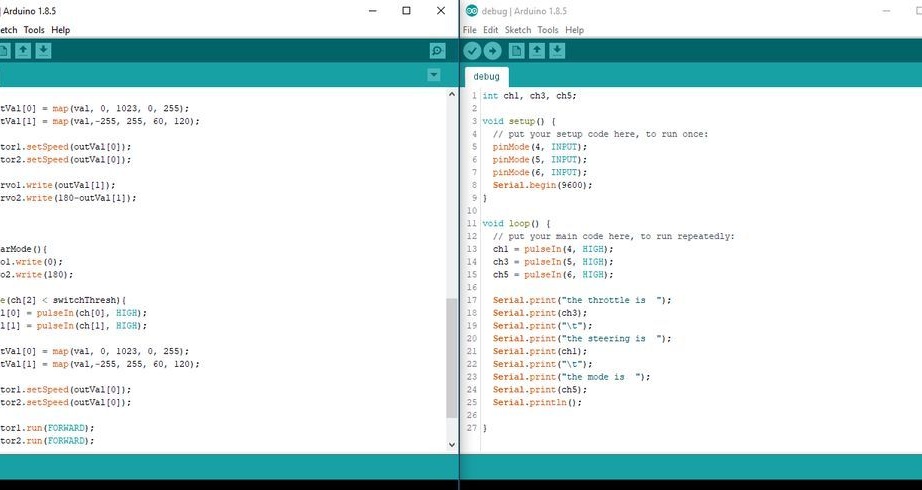
Muat turun kod di bawah.
amphibious_rover_code.ino
Selepas memuat turun kod itu, ia memeriksa operasi motor dan pemacu.
Langkah enam belas: perhimpunan
Kini tiba masanya untuk memasang kenderaan semua rupa bumi.
[pusat[/ center]
Memasang servos. Memasang motor gear.

Keluarkan roda. Keluarkan kedua-dua bahagian badan.






Semuanya sudah siap dan kini anda boleh menguji.