

Sebelum ini, mandibula bekerja untuk menukarkan basikalnya menjadi elektrik, menggunakan motor DC untuk mekanisme pintu automatik. Beliau juga mencipta bateri yang direka untuk 84 V DC.
Sekarang dia memerlukan pengawal kelajuan, yang boleh mengehadkan jumlah tenaga yang dibekalkan kepada enjin dari bateri. Kebanyakan pengawal kelajuan yang ada di rangkaian tidak direka untuk voltan tinggi, jadi ia telah memutuskan untuk melakukannya sendiri.
Dalam projek ini, pengawal kelajuan PWM individu akan direka bentuk dan dibina untuk mengawal kelajuan motor DC berskala besar.
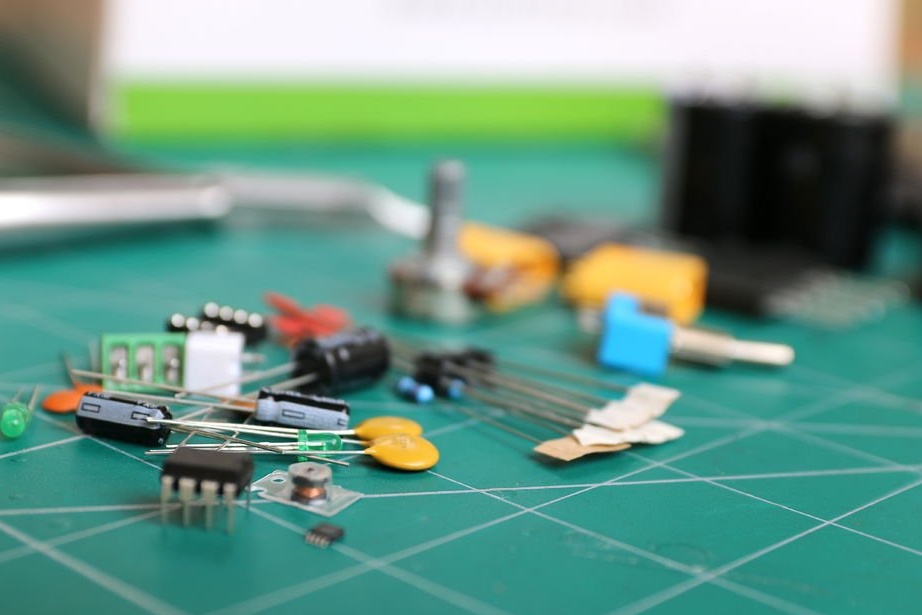
Langkah 1: Alat dan Bahan
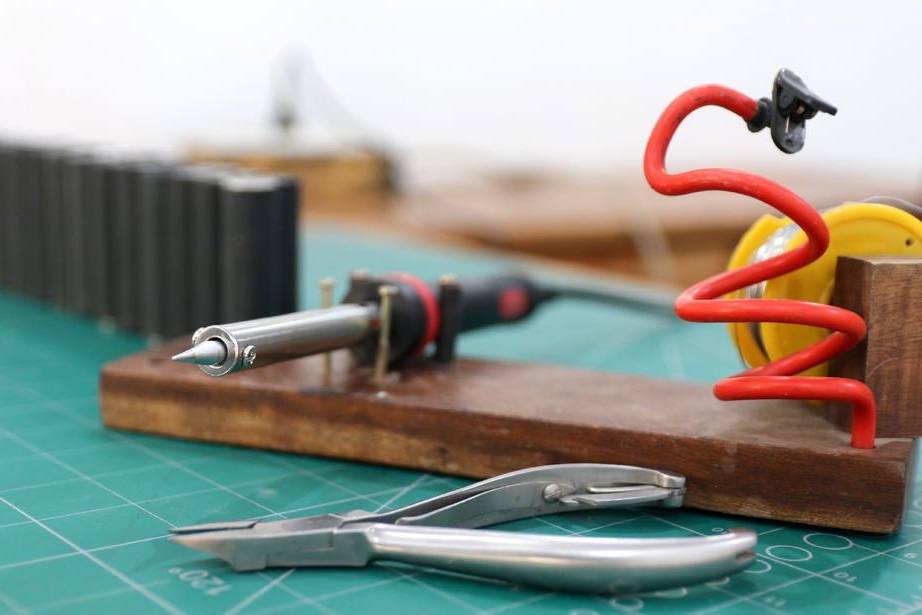




Untuk projek ini, anda memerlukan alat pematerian asas, seperti:
- Pematerian besi;
- sedutan pateri;
- tang;
Skema, fail Gerber dan senarai komponen boleh didapati.
Langkah 2: Reka Bentuk Pengawal Kelajuan
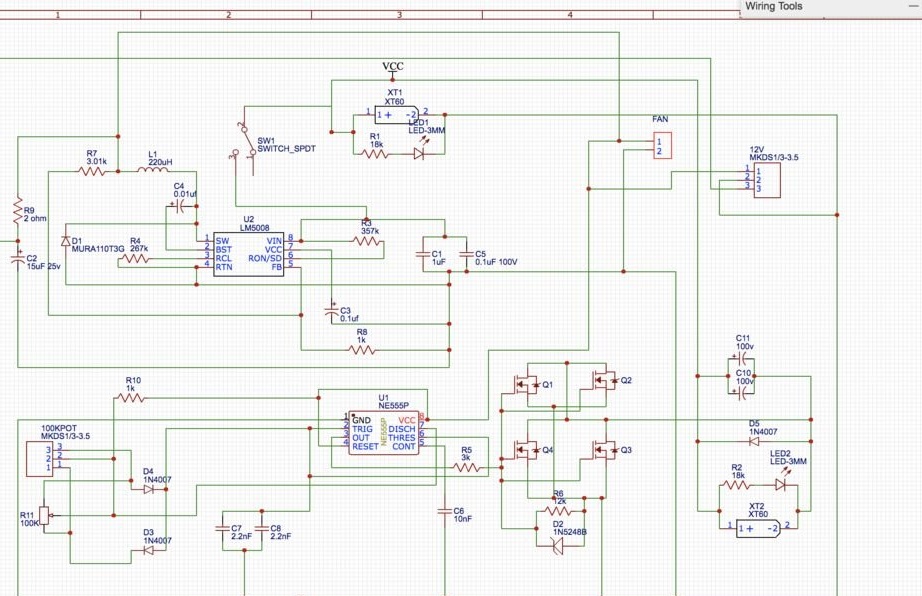
Oleh kerana kita berusaha mengawal kelajuan motor DC, kita boleh menggunakan dua teknologi. Penukar langkah ke bawah yang menurunkan voltan input agak rumit, jadi ia telah memutuskan untuk menggunakan Kawalan PWM (Pulse Width Modulation). Pendekatannya adalah mudah untuk mengawal kelajuan kuasa bateri; ia menghidupkan dan mematikan dengan frekuensi tinggi. Untuk menukar kelajuan basikal, kitaran tugas atau tempoh masa untuk mematikan pengawal ditukar.
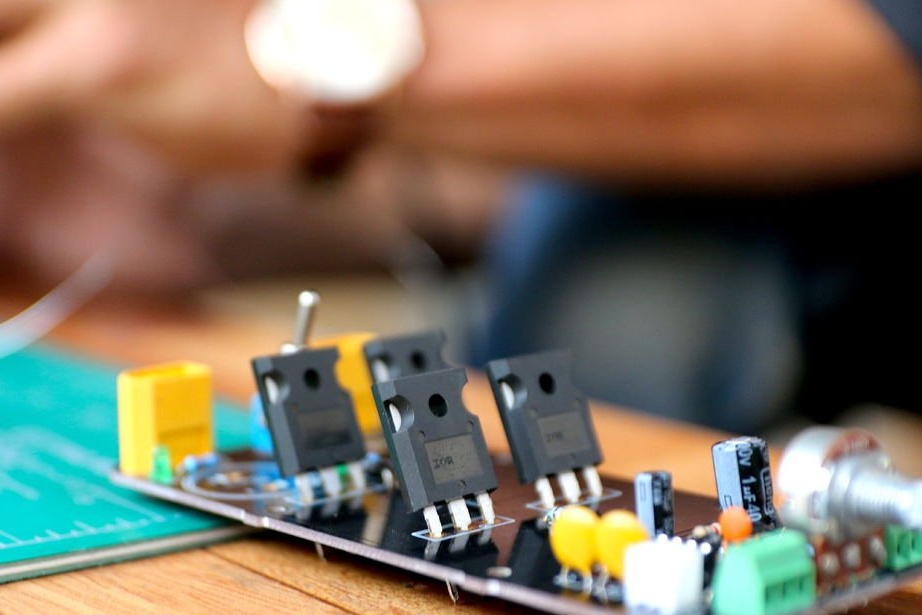
Suis mekanik tidak harus tertakluk kepada voltan tinggi pada masa ini, jadi Mosfet N-channel, yang direka khusus untuk mengendalikan jumlah arus sederhana pada frekuensi tinggi, adalah pilihan yang sesuai.
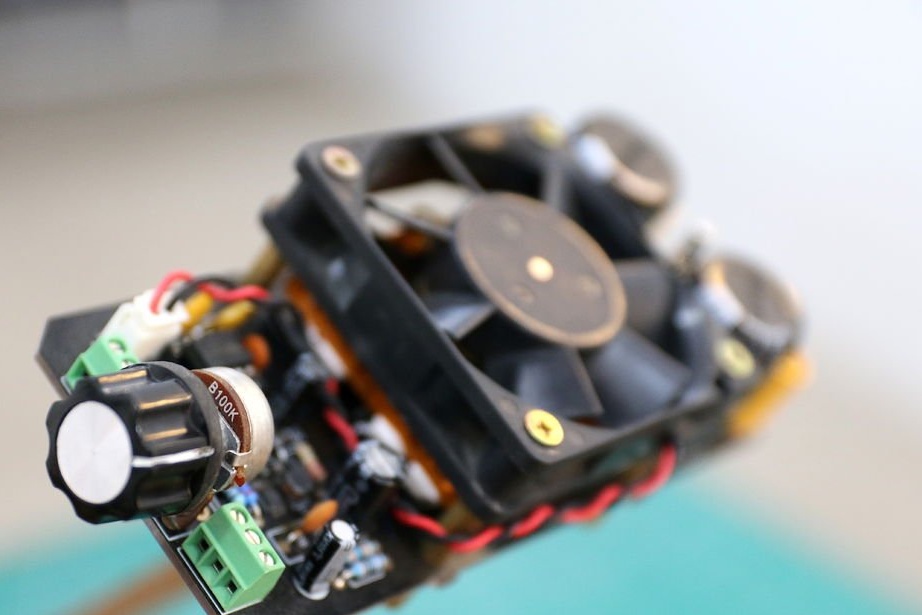
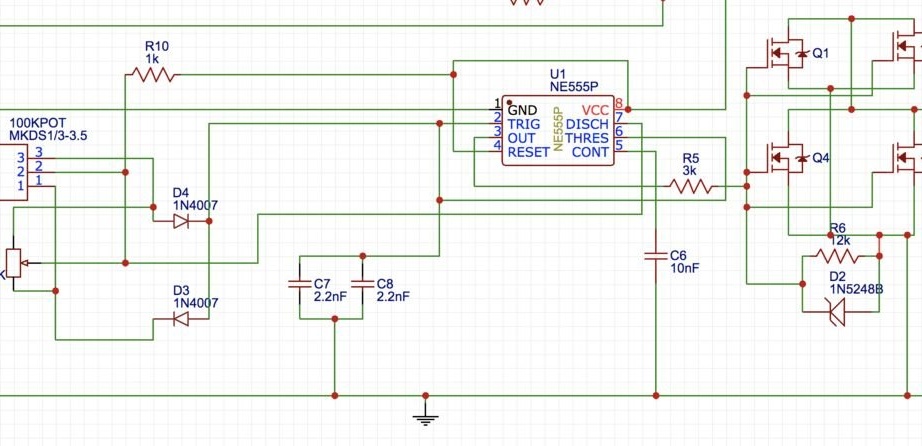
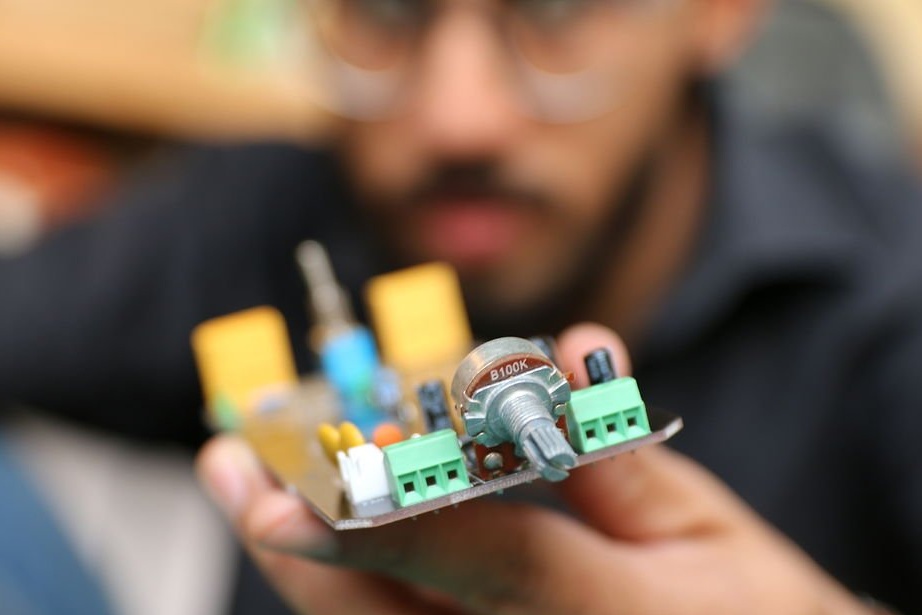
Untuk menukar hemisfera, isyarat PWM diperlukan, yang dihasilkan oleh pemasa IC 555, dan kitaran tugas isyarat penukaran diubah menggunakan potensiometer 100 kΩ.
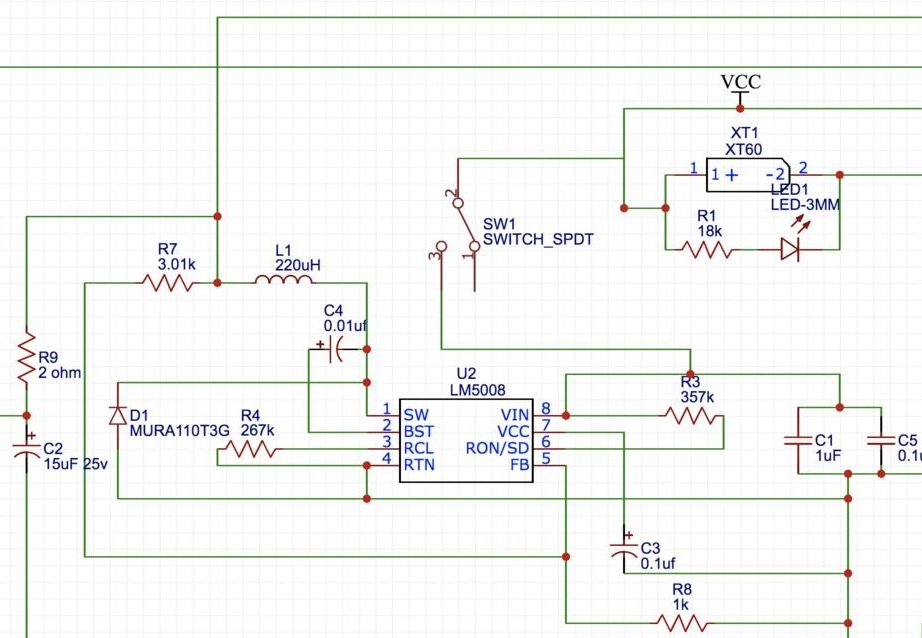
Oleh kerana kita tidak boleh bekerja dengan pemasa 555 di atas 15 V, kita perlu menghidupkan litar bersepadu lm5008 litar bersepadu, yang menurunkan voltan masukan dari 84 V hingga 10 V DC, yang digunakan untuk menggerakkan kipas pemasa dan penyejuk.
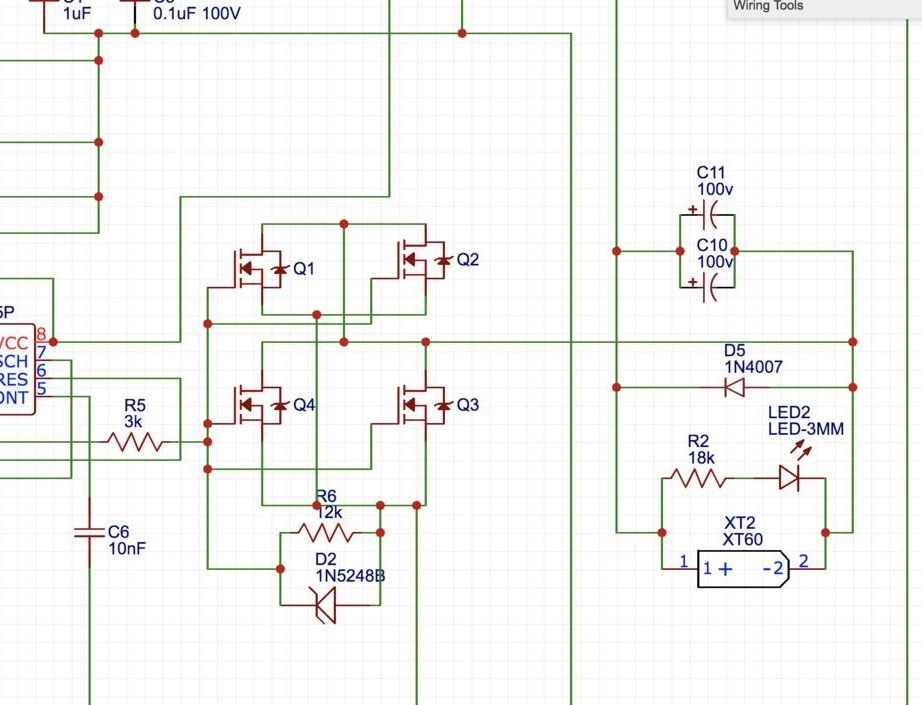
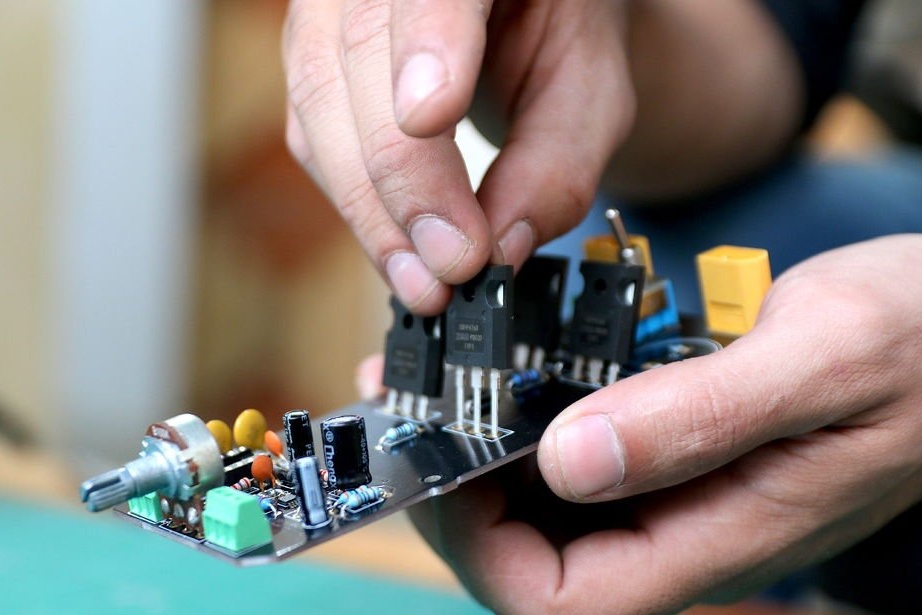
Untuk memproses sejumlah besar arus, empat Mosfets N-saluran telah digunakan, yang disambung secara selari.
Di samping itu, semua komponen tambahan telah ditambahkan seperti yang diterangkan dalam jadual data.
Langkah 3: Reka bentuk PCB
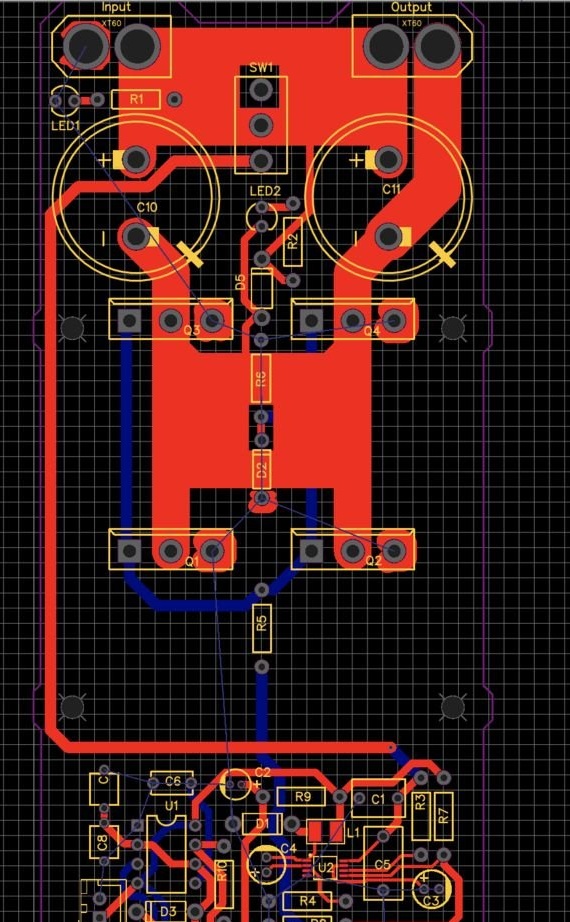
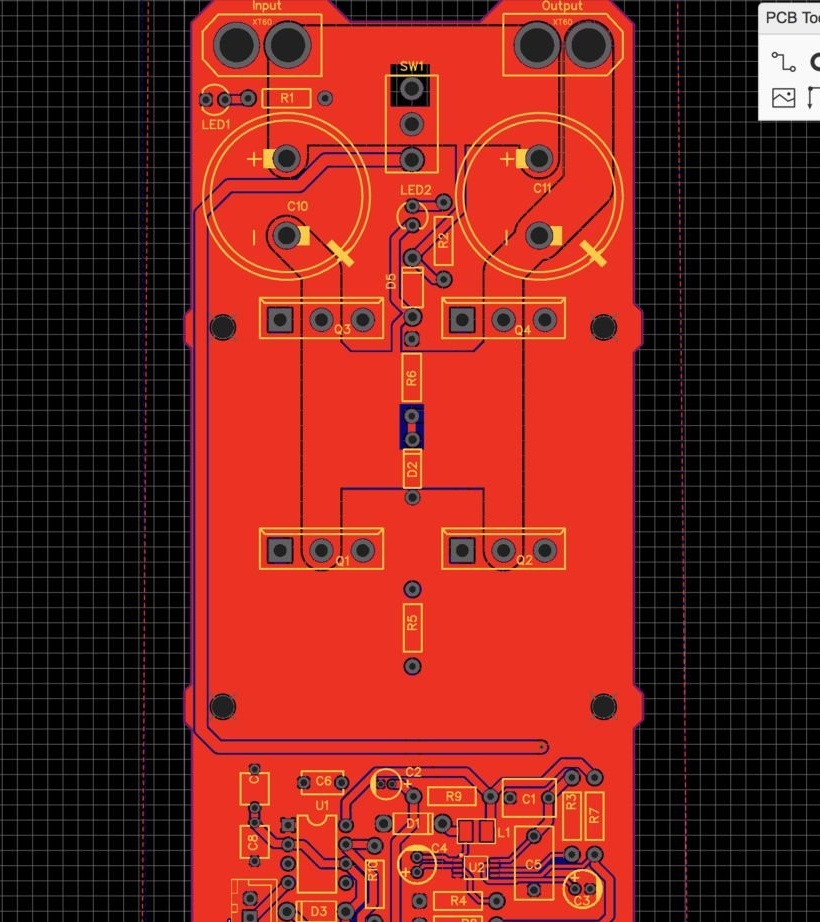
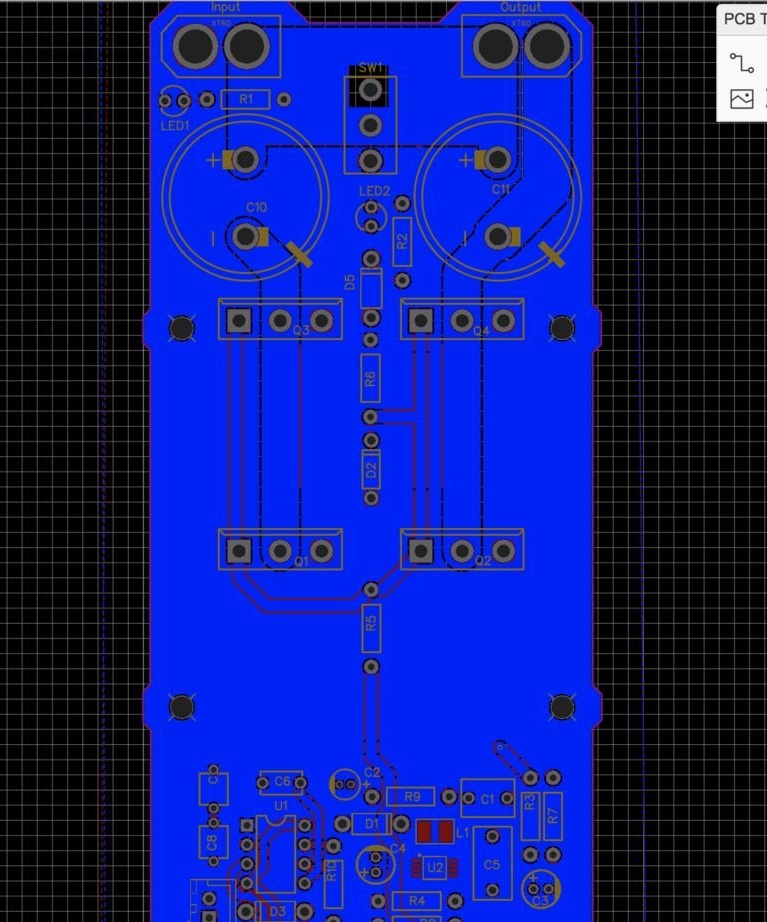
Setelah selesai litar, diputuskan untuk memulakan papan litar bercetak khas untuk pengawal laju. Ia telah memutuskan untuk merekabentuk peranti ini supaya ia dapat diubahsuai lagi untuk projek DIY yang lain yang menggunakan motor DC besar.
Idea untuk mereka bentuk papan litar mungkin memerlukan banyak usaha, tetapi ia berbaloi. Sentiasa cuba merekabentuk modul tertentu di papan yang lain. Modul sedemikian termasuk litar kawalan dan kuasa. Ini dilakukan supaya apabila menyambung segala-galanya bersama-sama, anda boleh memilih lebar jalur cetak yang sesuai, terutama di sisi penawaran.
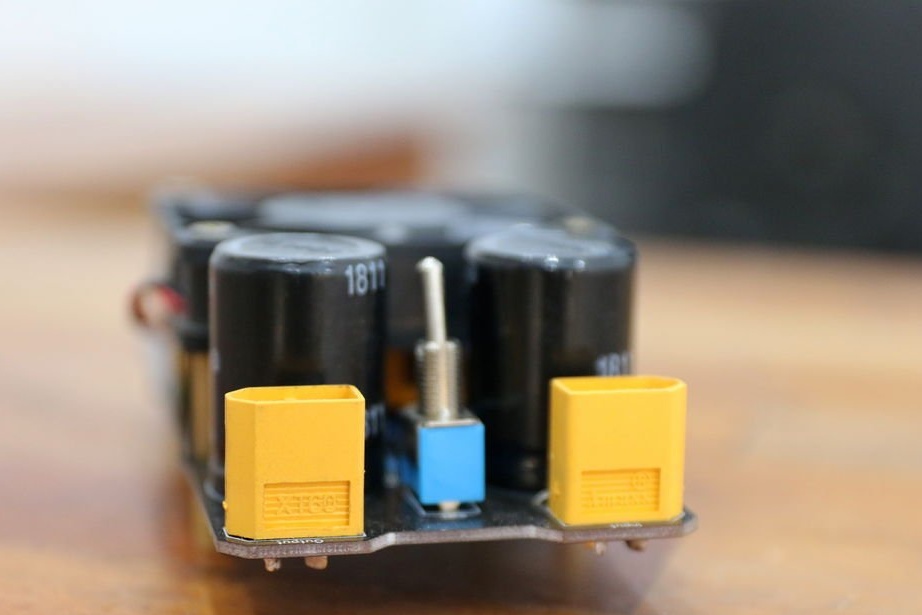
Empat lubang pelekap juga telah ditambah, yang akan berguna untuk memasang pengawal dan memegang kipas bersama-sama dengan heatsink atas MOSFET.
Langkah 4: Perintah PCB
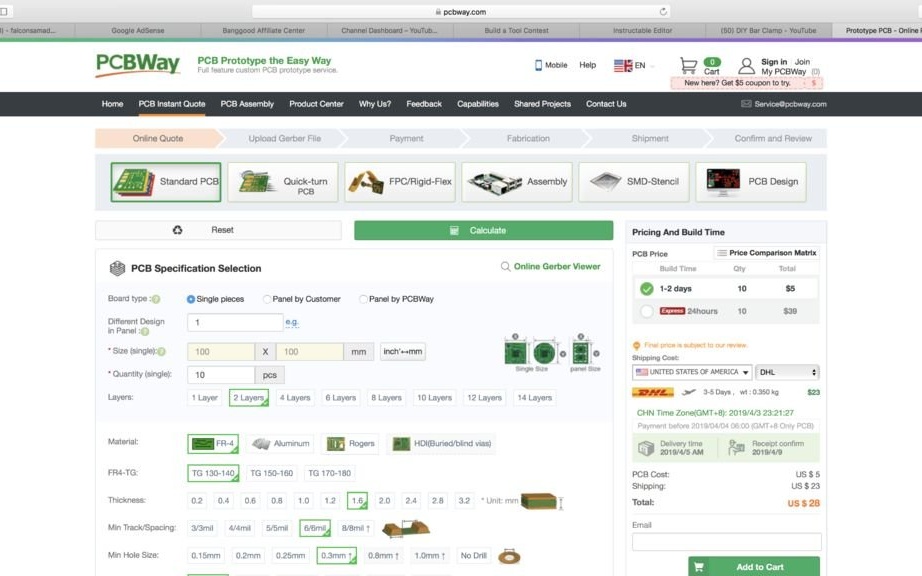

Tidak seperti bahagian khusus lain untuk projek DIY, papan litar bercetak adalah paling ringan. Apabila fail Gerber untuk susun atur akhir papan litar sudah siap, terdapat beberapa klik yang tersisa untuk memerintahkan papan litar bercetak khusus.
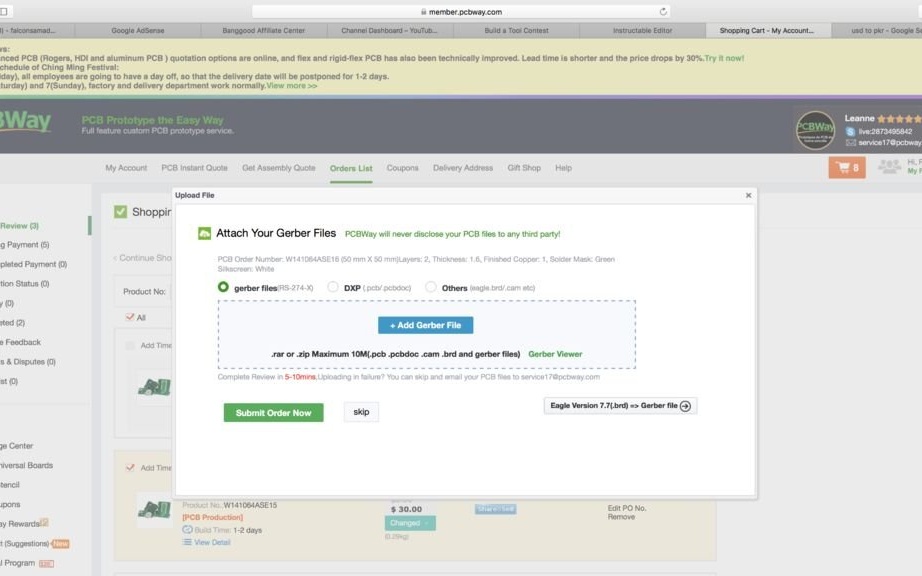
Apa yang dilakukan oleh penyihir projek ini ialah pergi ke PCBWAY dan muat naik fail Gerbernya. Selepas pasukan teknikal mereka memeriksa reka bentuk untuk kesilapan, reka bentuk akan dihantar ke barisan pengeluaran. Seluruh proses akan mengambil masa dua hari dan papan litar bercetak akan tiba di alamat yang ditentukan dalam masa seminggu.
Fail Gerber, skematik dan spesifikasi untuk papan litar pengawal kelajuan boleh didapati.
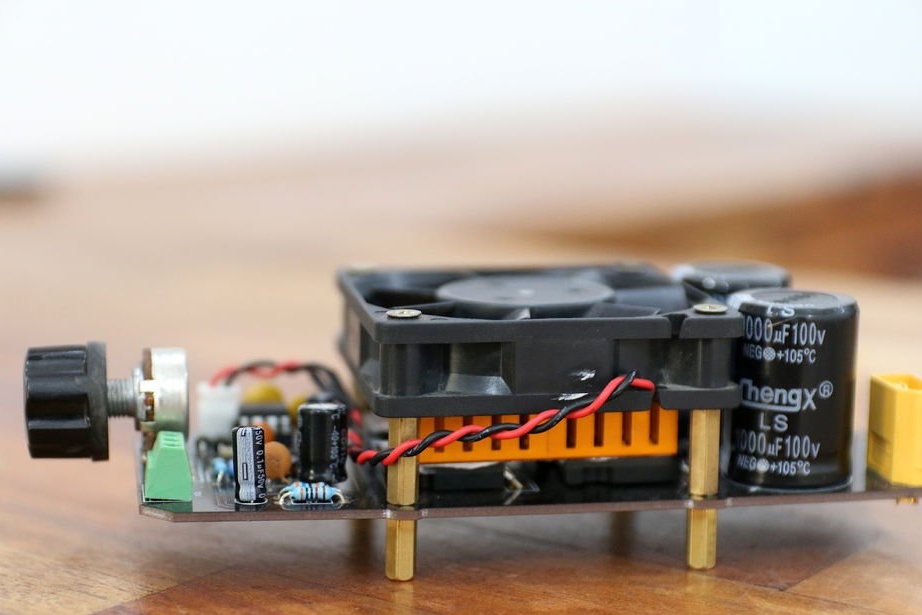
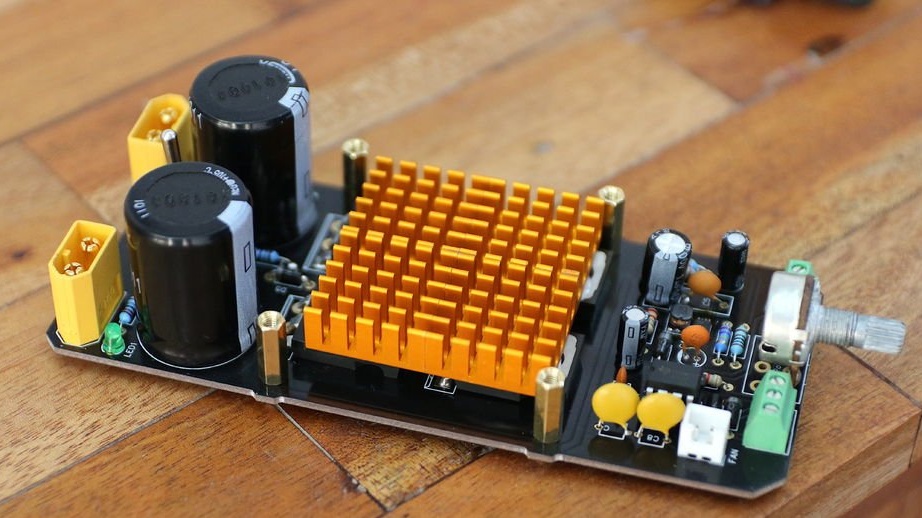
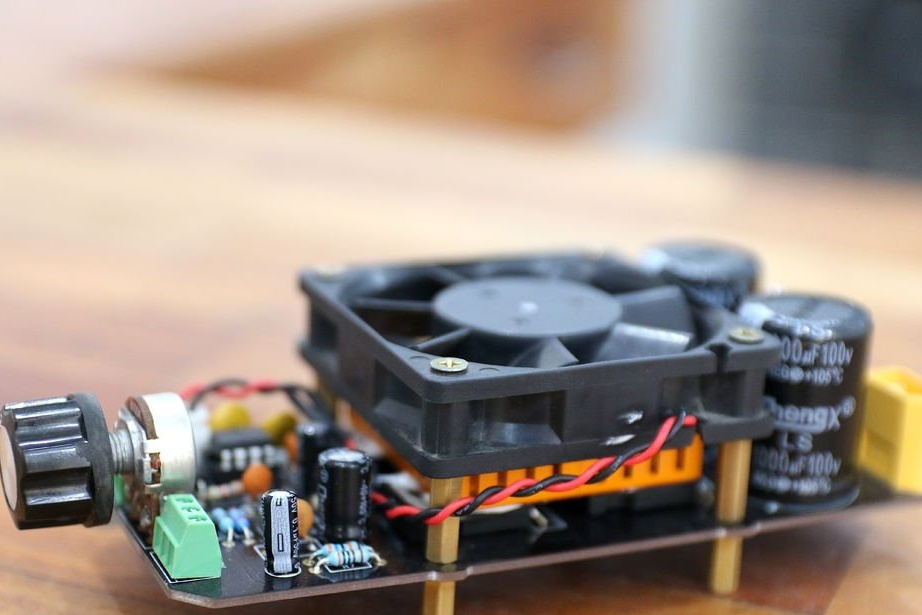
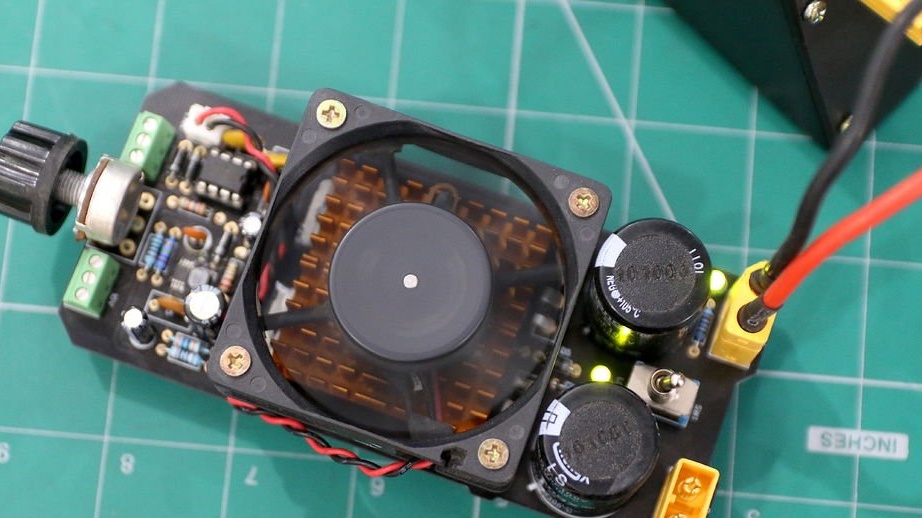
Langkah 5: Memasang PCB
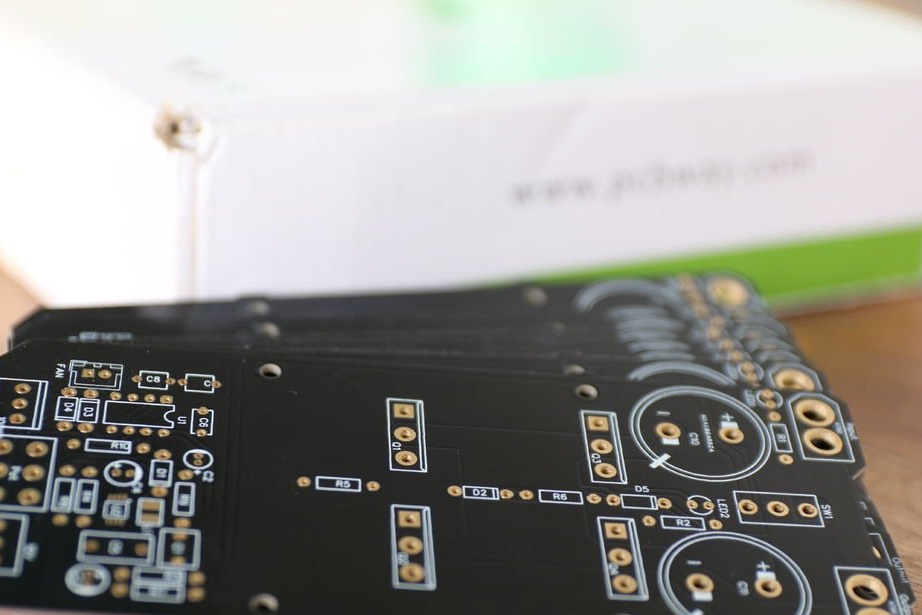
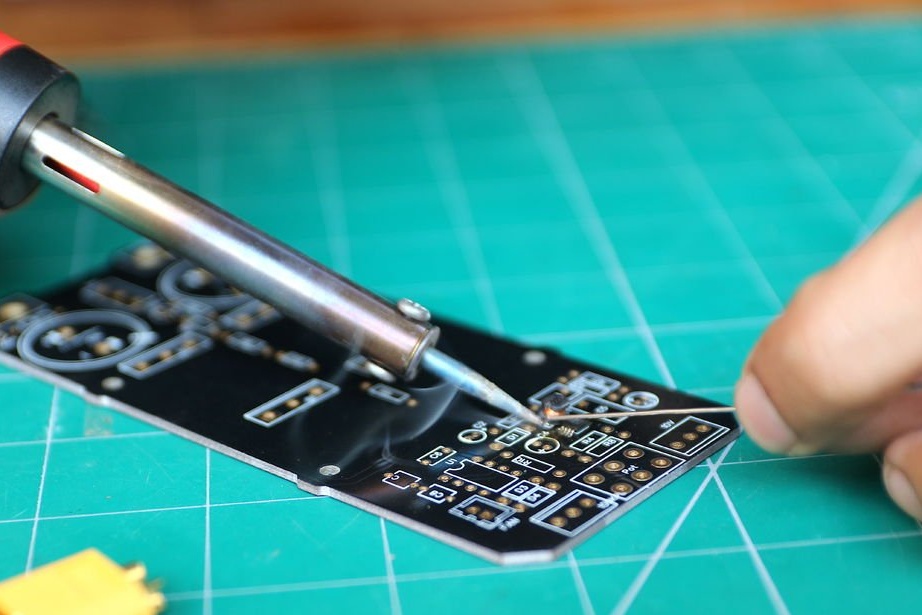
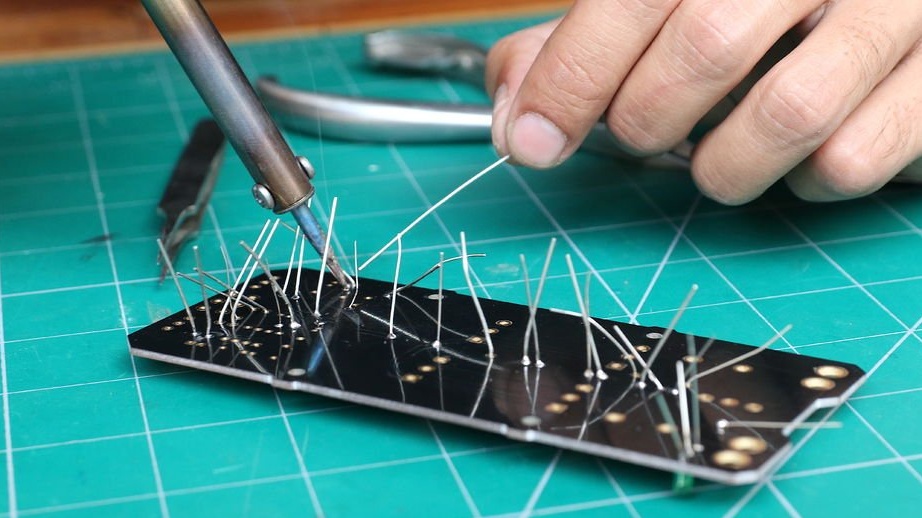

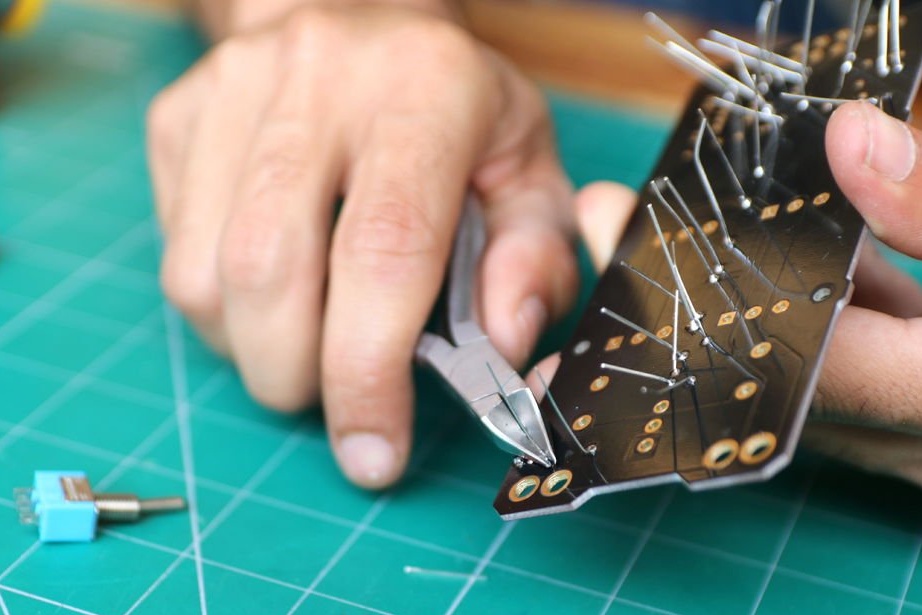
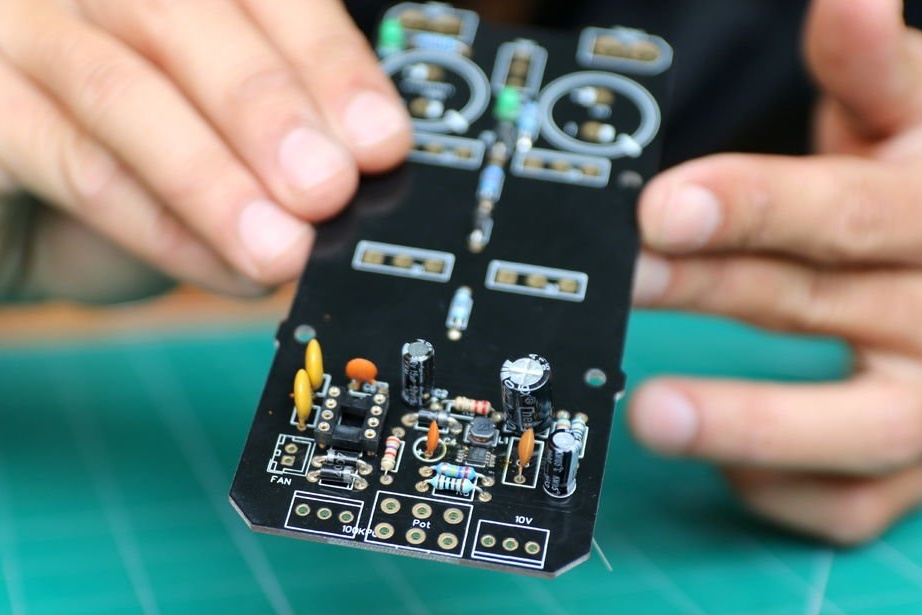



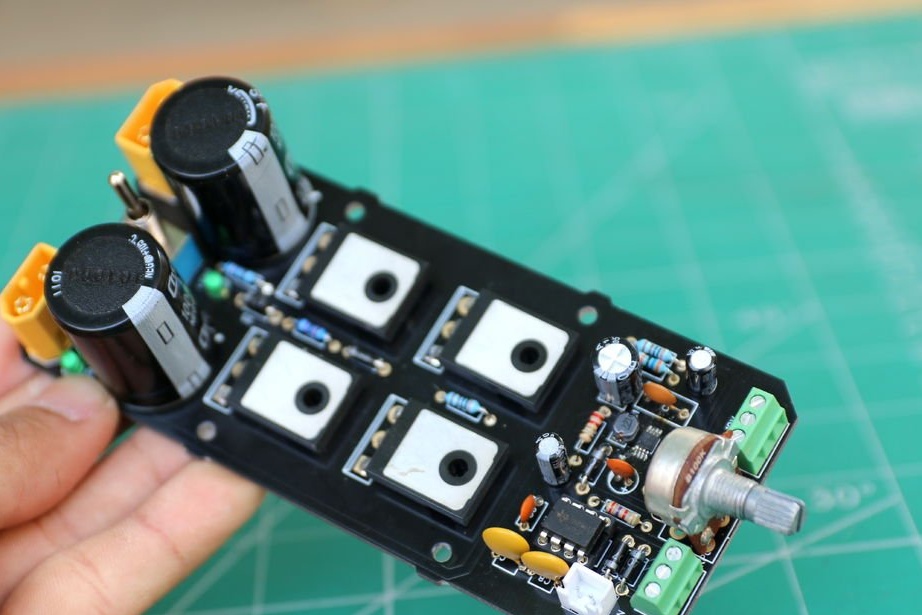
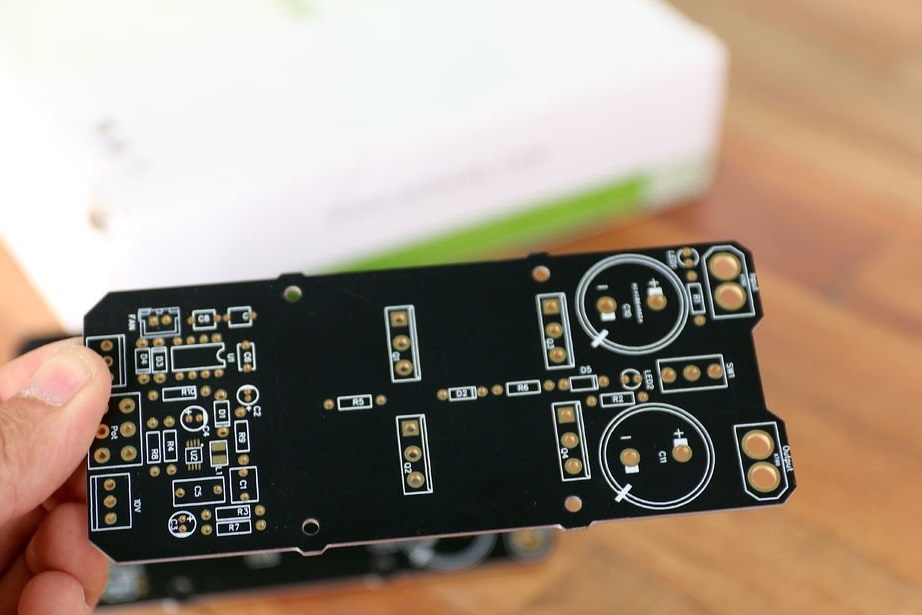
Seperti yang dijangka, papan litar tiba dalam masa seminggu. Kualiti papan litar bercetak benar-benar sempurna. Sudah tiba masanya untuk memasang semua komponen seperti yang ditunjukkan dalam spesifikasi dan meletakkannya di tempat.
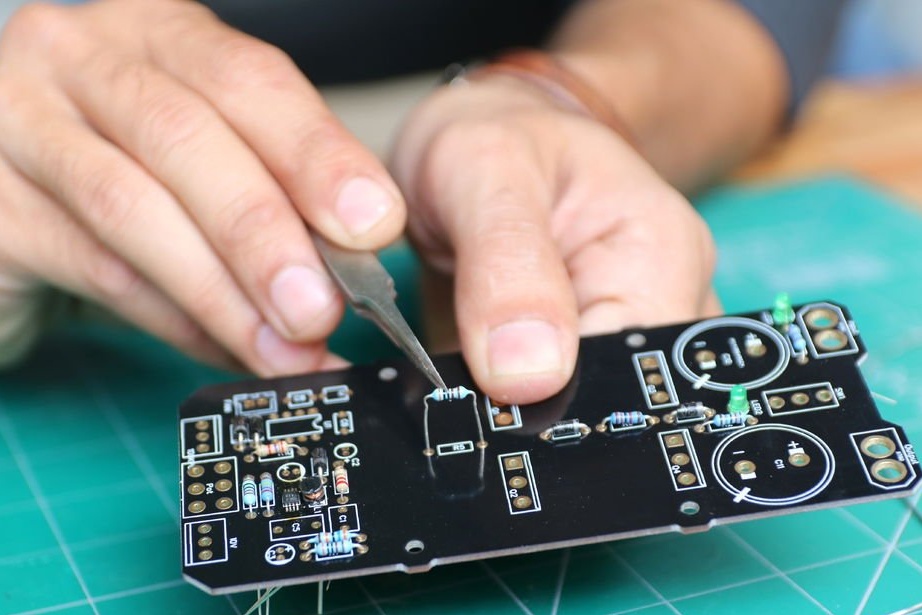
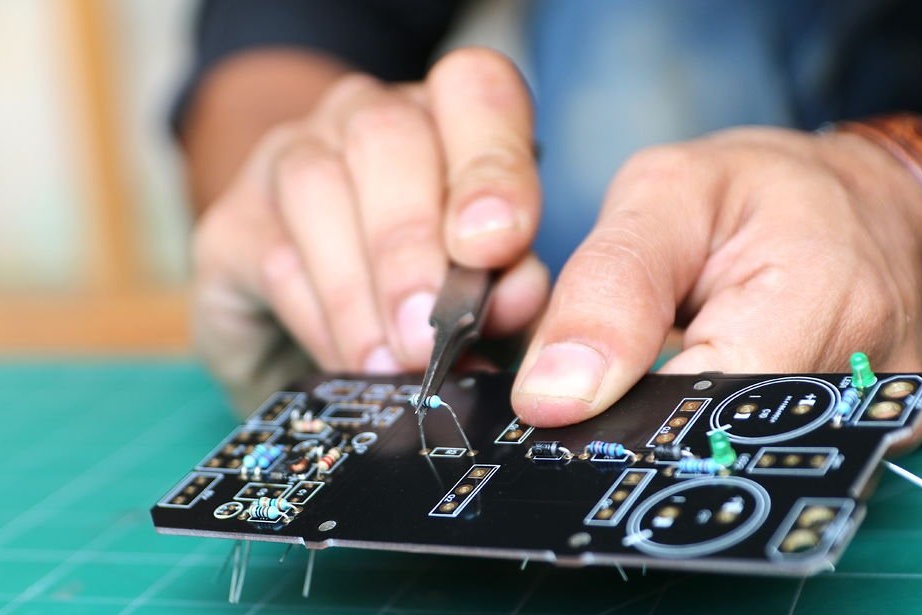
Untuk semuanya berjalan lancar, anda perlu bermula dengan komponen terkecil di papan litar, yang dalam kes kami ialah penukar LM5008 Buck, komponen SMP. Sebaik sahaja komponen itu dipateri, mengikut gambarajah, tuan mula bekerja dengan komponen yang lebih besar.
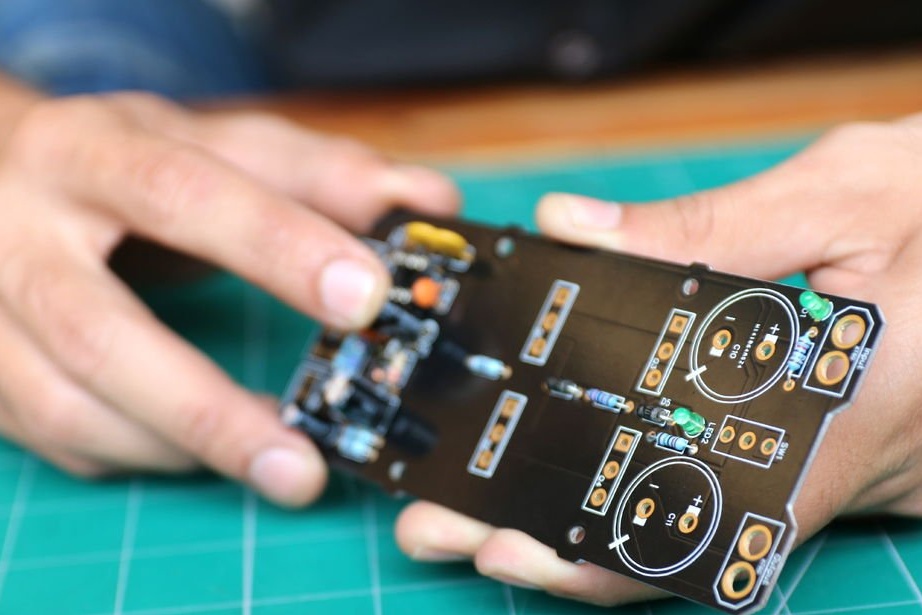
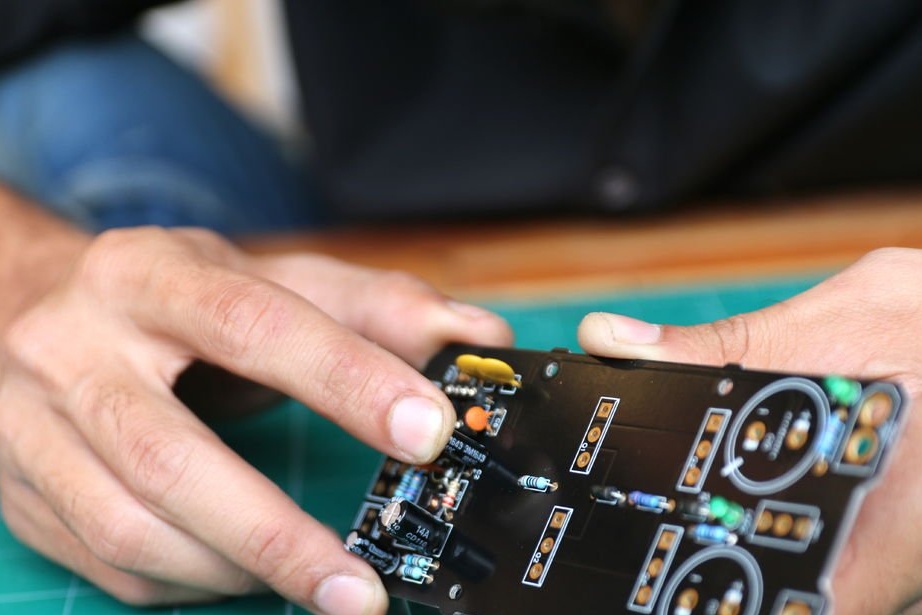
Selepas memasang papan, sudah tiba masanya untuk menetapkan pemasa 555 dengan kedudukan dalam arah yang betul.
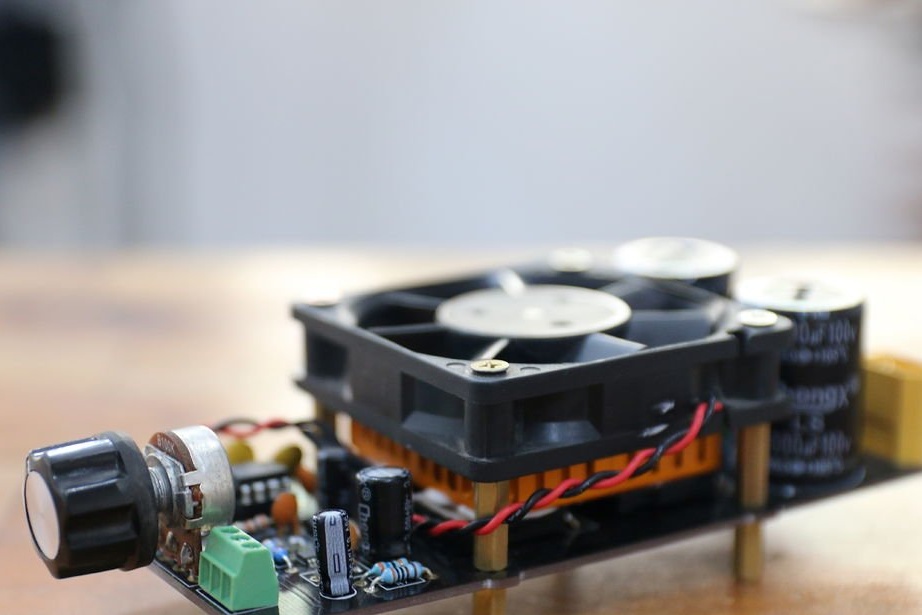
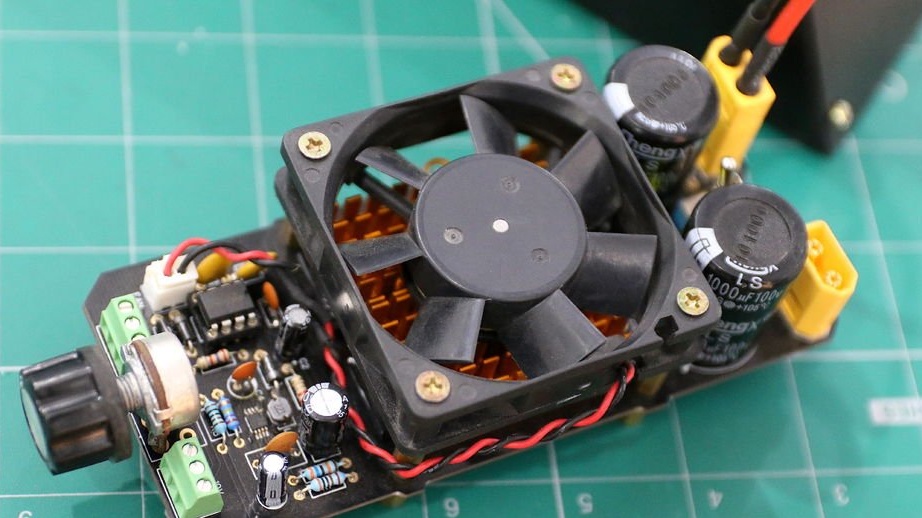
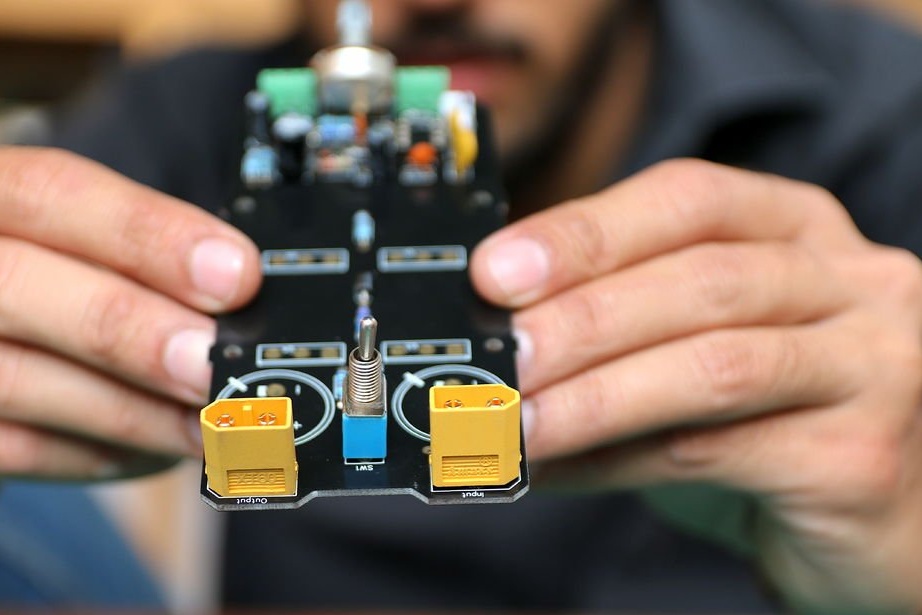
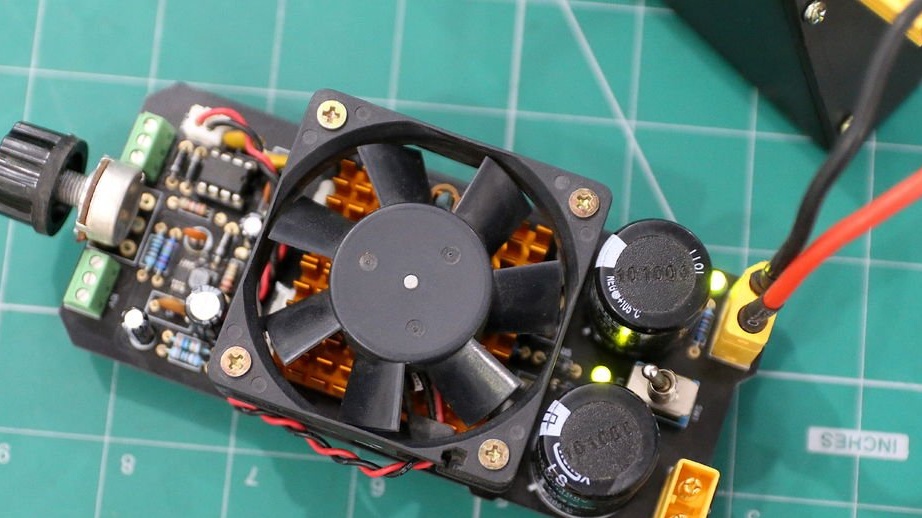
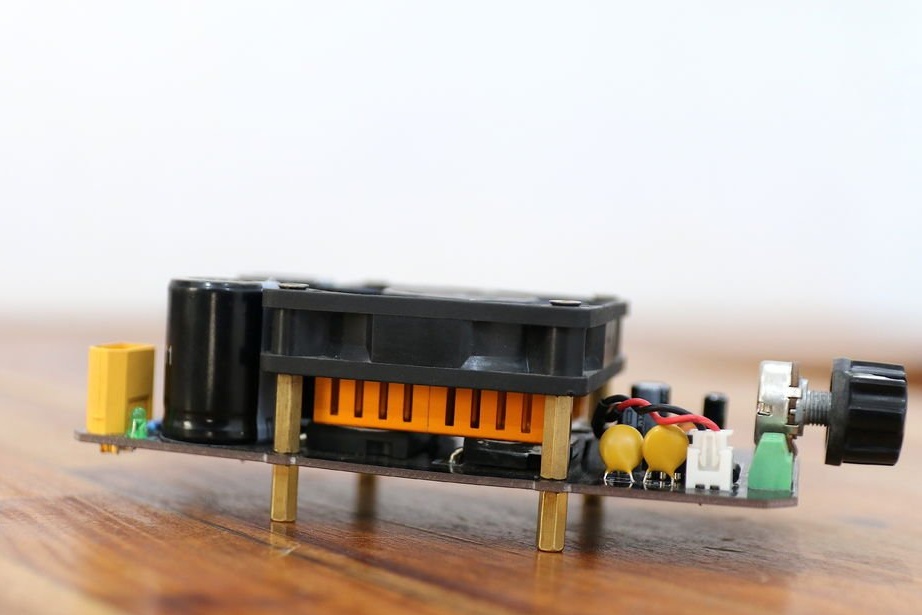
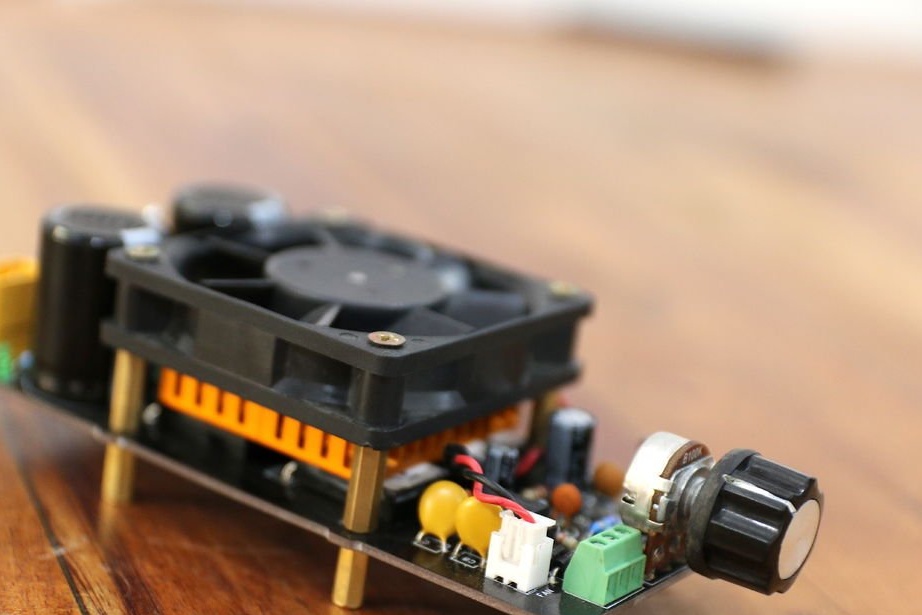
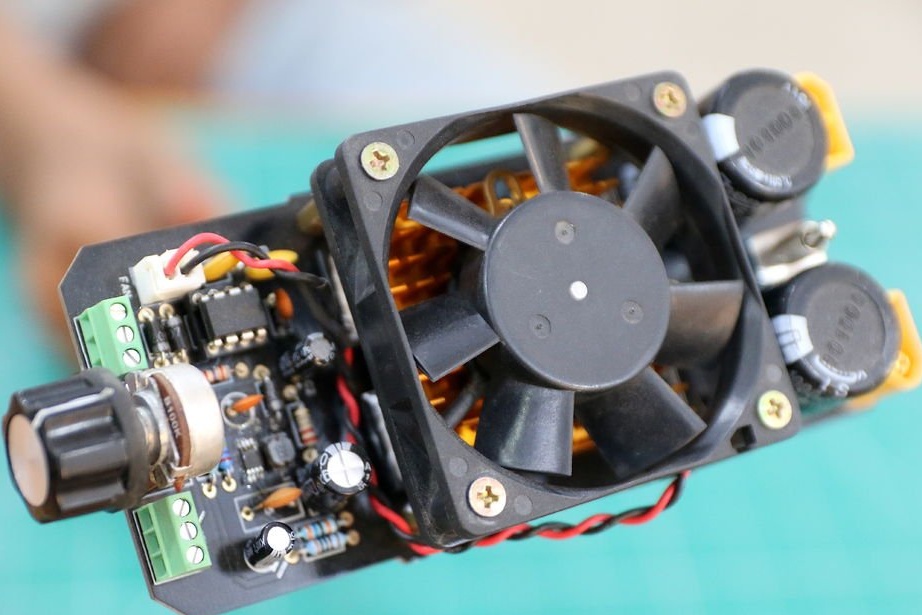
Langkah 6: Penyejukan
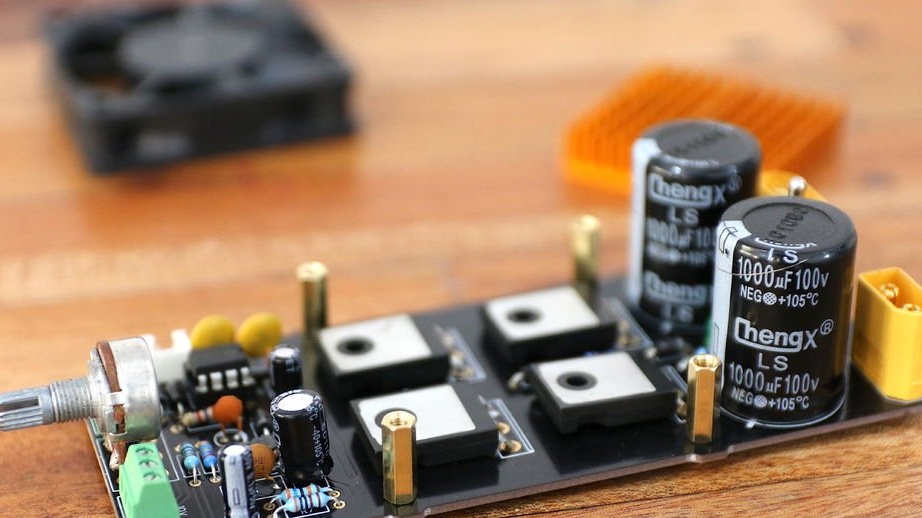
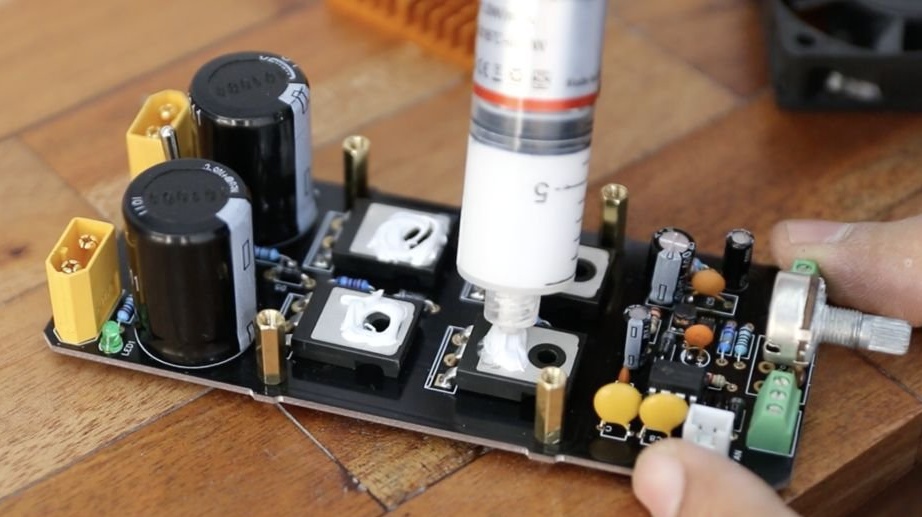
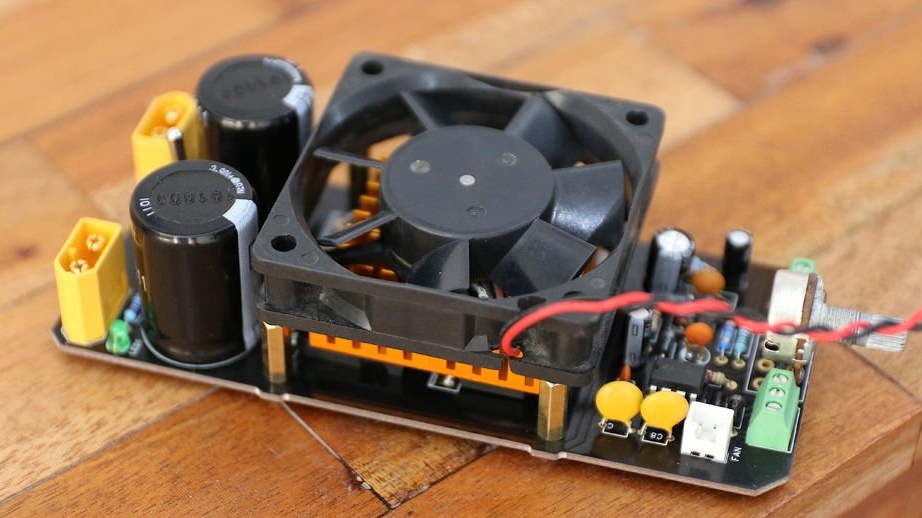
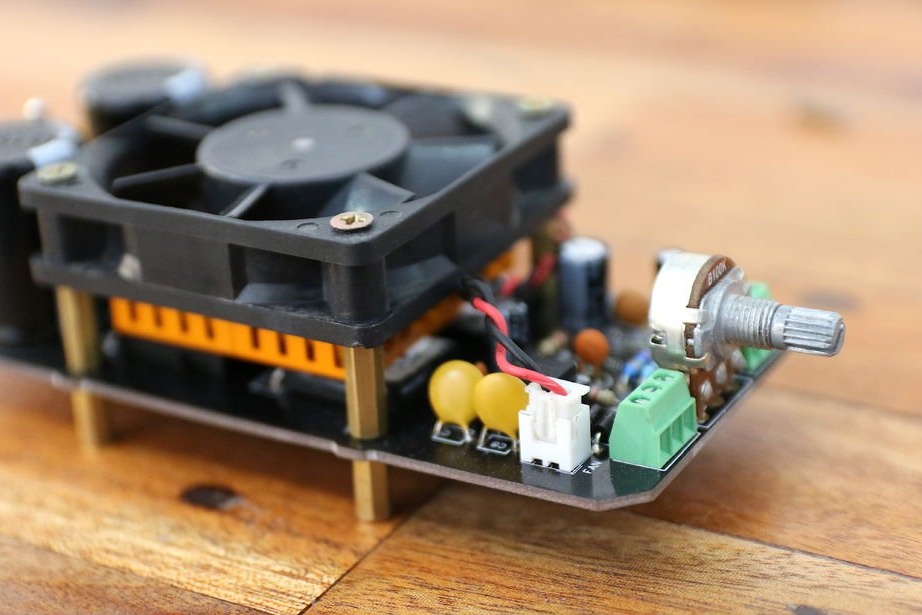
Dengan begitu banyak tenaga untuk berurusan dengan, jelaslah bahawa lembaga itu akan menjadi panas. Oleh itu, untuk mengatasi haba yang berlebihan, perlu membengkokkan MOSFET dan memasang kipas 12 V dengan suis di antara radiator.
Selepas itu, pengawal kelajuan PWM bersedia untuk beroperasi.
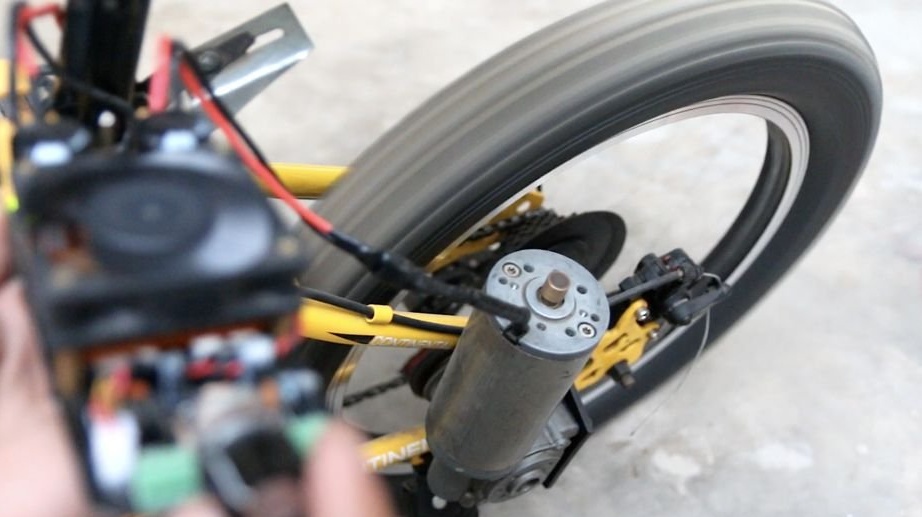
Langkah 7: menguji pengawal

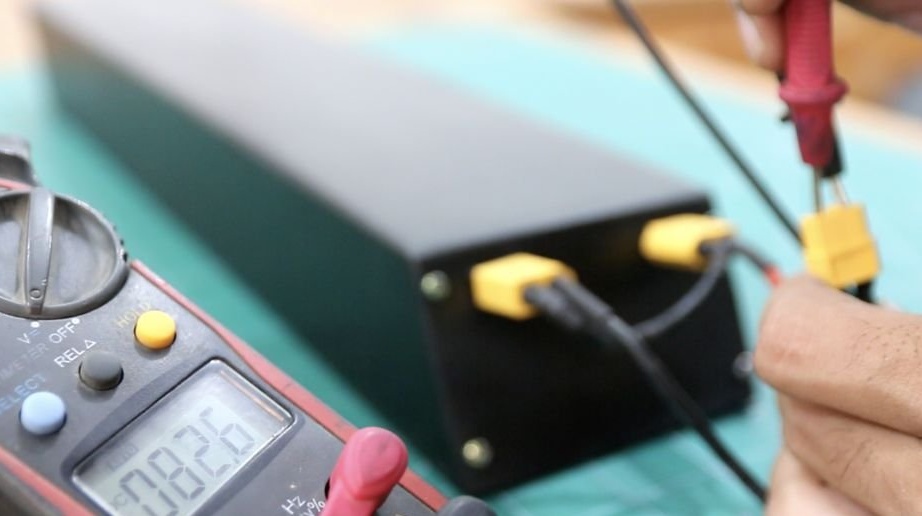
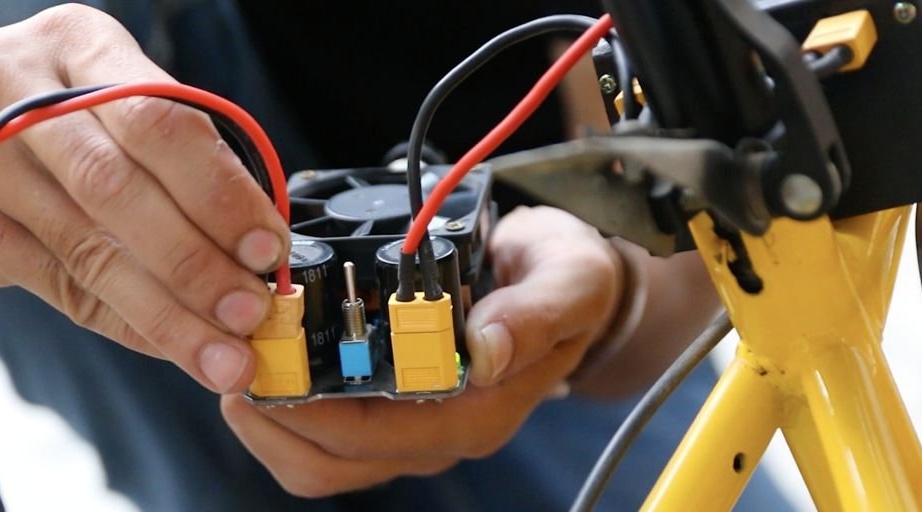
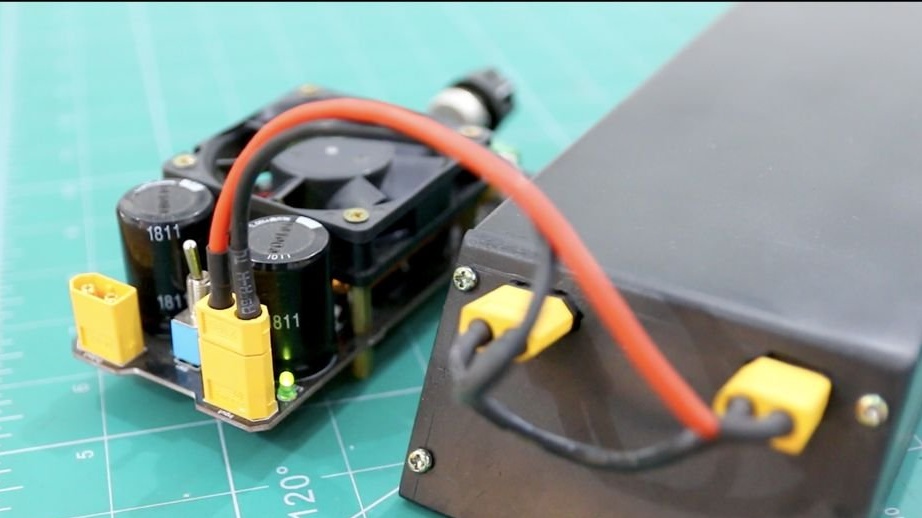

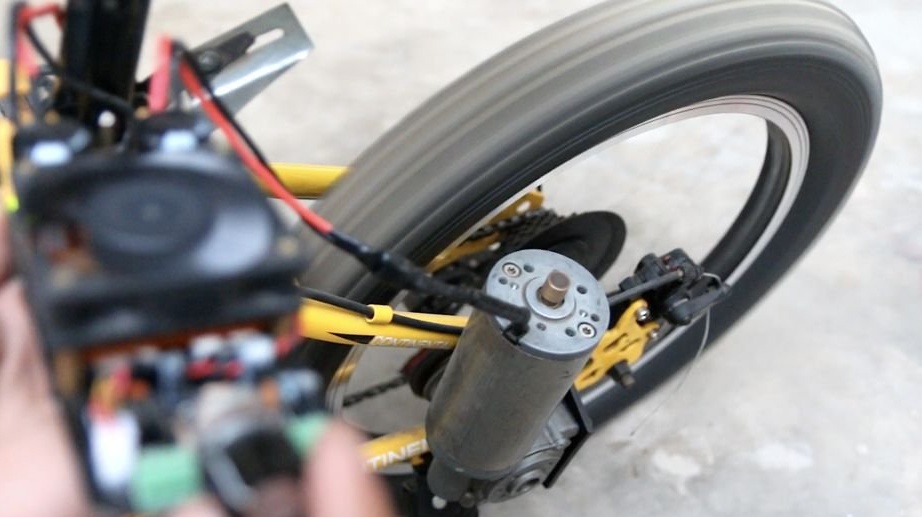
Untuk menguji pengawal, bateri 84 V untuk basikal elektrik, yang dibuat oleh tuan sebelumnya, akan digunakan. Pengawal disambung sementara ke bateri dan motor, yang dilampirkan basikal untuk memandu roda belakang.
Selepas menukar suis, pengawal menghidupkan dan kipas udara menghembus udara MOSFET. Apabila potensiometer berputar mengikut arah jam, enjin mula berputar dan secara beransur-ansur meningkatkan kelajuan, berkadaran dengan putaran pegangan.
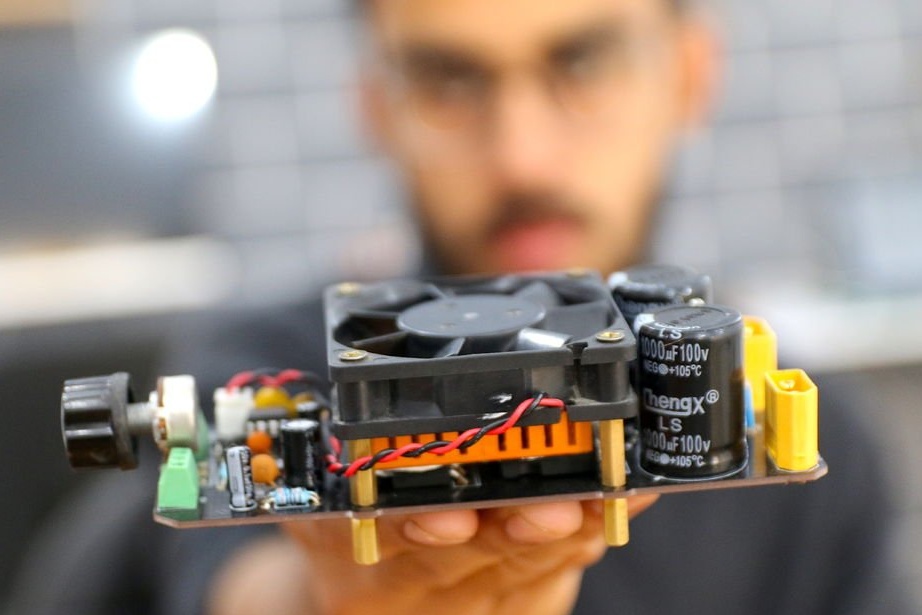
Langkah 8: Keputusan Akhir

Pengawal kelajuan sudah siap dan ia melebihi semua jangkaan tuan berkenaan dengan keupayaannya. Pengawal berfungsi dengan mudah dengan bateri 84 V dan lancar mengawal kelajuan enjin.
Tetapi untuk menguji pengawal kelajuan ini di bawah beban, tuan perlu menyiapkan projek basikalnya dan melancarkan semua komponen bersama.
Anda juga boleh menonton video pada pemasangan pengawal ini: