
Pertama sekali, saya ingin mengatakan bahawa ini bukan panduan untuk menyelesaikan semua masalah dengan arduino di dunia, tetapi hanya yang saya hadapi. Walau bagaimanapun, berhadapan dengan masalah ini, saya menghabiskan banyak masa mencari maklumat mengenai cara menyelesaikannya, jadi saya rasa artikel itu berguna. Juga, saya tidak akan mempertimbangkan masalah yang berkaitan dengan kompilasi. Kesalahan kompilasi adalah kesilapan pengaturcaraan, ini sudah menjadi kes khas dan mereka juga dianggap secara peribadi di pelbagai forum.
Kaedah 1. Standard firmware
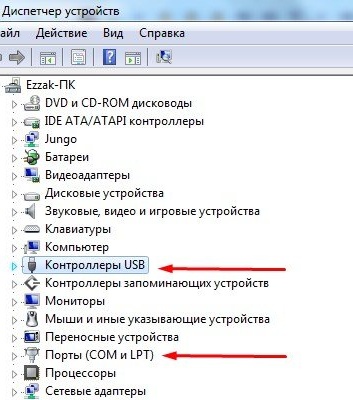
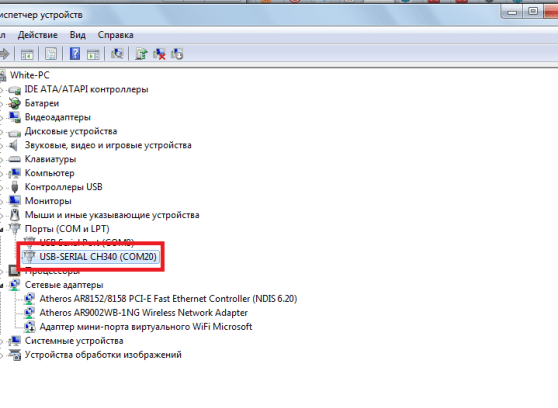
Walaupun kesederhanaan arduino dari segi pengaturcaraan, walaupun pada tahap ini masalah dapat timbul. Mereka timbul, sebagai peraturan, apabila menggunakan klon Cina. Tetapi kita akan sistematik. Untuk program Arduino seperti yang dimaksudkan oleh para pengembang, Anda perlu mengunduh dan memasang lingkungan pembangunan dari luar tapak Arduino IDE dan memasang seperti yang diarahkan. Terdapat beratus-ratus, jika tidak beribu-ribu artikel tentang hal ini, walaupun dalam segmen bahasa Rusia di Internet, saya tidak akan memikirkannya. Apabila menggunakan masalah arduino asal tidak seharusnya timbul. Tetapi dengan kami, sebagai peraturan, semua orang menggunakan klon Cina yang lebih murah. Mereka, secara amnya, tidak berbeza dengan yang asal, sekurang-kurangnya dari segi prestasi. Secara peribadi, saya mempunyai susun atur Cina Arduino Pro Mini dengan kenalan A4 dan A5 bersama-sama dengan yang lain, saya suka lebih daripada susunan papan asal. Tetapi pada masa yang sama, orang Cina, walaupun sistem komunis, sebenarnya adalah kapitalis yang paling tulen, dan menjimatkan segala yang mereka dapat untuk dieksport. Cip antara muka USB arduino itu juga jatuh di bawah ekonomi ini. Di sinilah permulaan masalah. Fakta adalah bahawa dalam klon Cina, cip CH340 yang asal tidak digunakan. Oleh itu, kami akan mengandaikan bahawa anda telah menyelesaikan semua prosedur standard untuk memasang perisian dan pemacu, tetapi arduino tidak dijahit. Perkara pertama yang kita pergi START> Panel Kawalan> Pengurus Peranti. Di sini kita menarik perhatian kepada dua perkara: Pengawal USB dan port LPT COM.
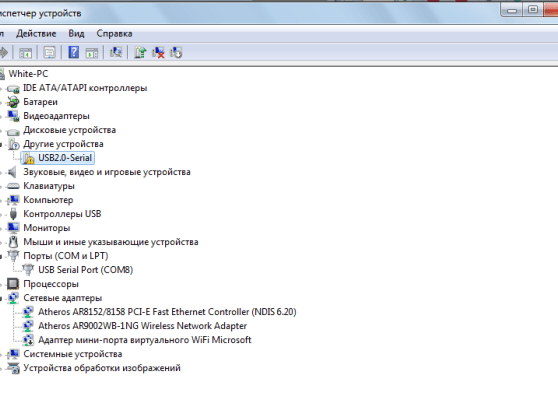
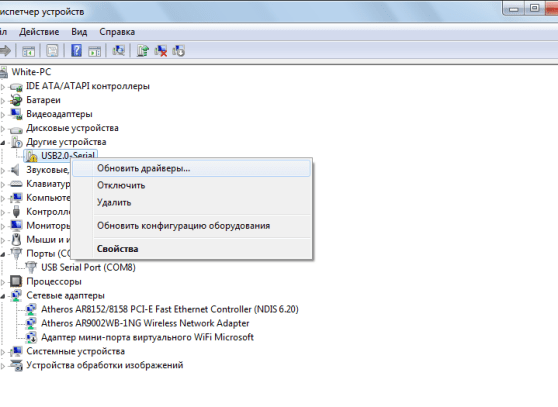
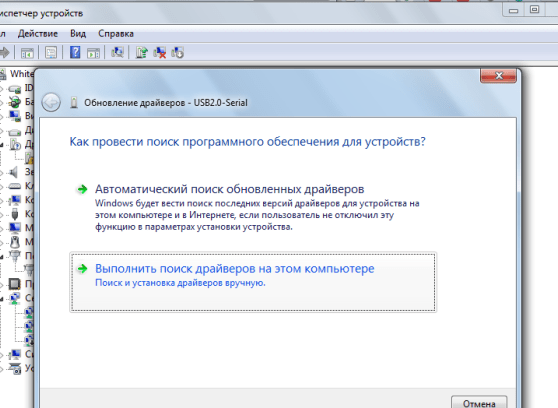
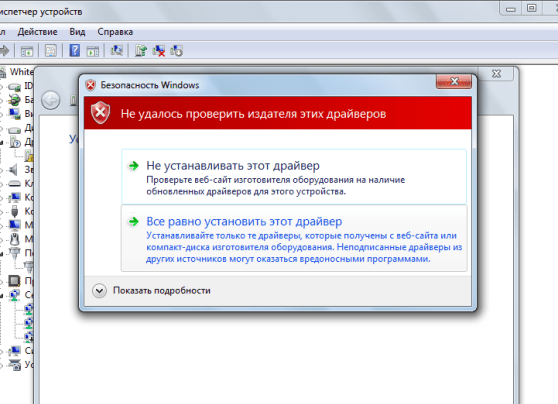
Jika item itu Pelabuhan (COM dan LPT) tidak semestinya, ini adalah petunjuk pertama dalam menyelesaikan masalah ini. Sekiranya semuanya berjalan lancar, maka di mana pelabuhan pelabuhan baru akan muncul apabila menyambung arduino. Sekiranya ini tidak berlaku, lihatlah apa yang berlaku dalam "pengawal USB". Apabila menyambungkan arduino, peranti baru dengan tulisan USB 2.0 Serial akan muncul. Ini sebenarnya merupakan petanda yang baik. Jika komputer melihat bahawa ia disambungkan kepadanya, tetapi siapa yang tidak dapat memahami, maka arduinka masih hidup, dan masalahnya adalah kayu bakar. Jika ini tidak berlaku, kita baca kaedah 2 dan kaedah 3. Untuk menyelesaikan masalah ini, anda mesti memasang pemandu baru secara manual. Muat turun pemacu, letakkan folder dengannya di tempat yang mudah. Mari kembali ke sini Pengurus perantilebih lanjut USB 2.0 Serial> RMB> Properties> Pemandu> Kemas kini> Cari pemandu di komputer ini dan pilih folder dengan pemandu. Selepas itu, sistem mungkin mula bersumpah bahawa pemandu tidak dari sumber yang dipercayai. Klik memasang pula.
Muat turun pemandu
Anda memuat turun pemacu, dipasang, tetapi arduino masih belum dijahit. Masalahnya boleh dari kedua-dua kilang dan kesalahan pengguna, tidak mengapa. Apa yang kita buat? Kami lulus dengan kaedah kedua.
Kaedah 2. Firmware melalui penukar TTL
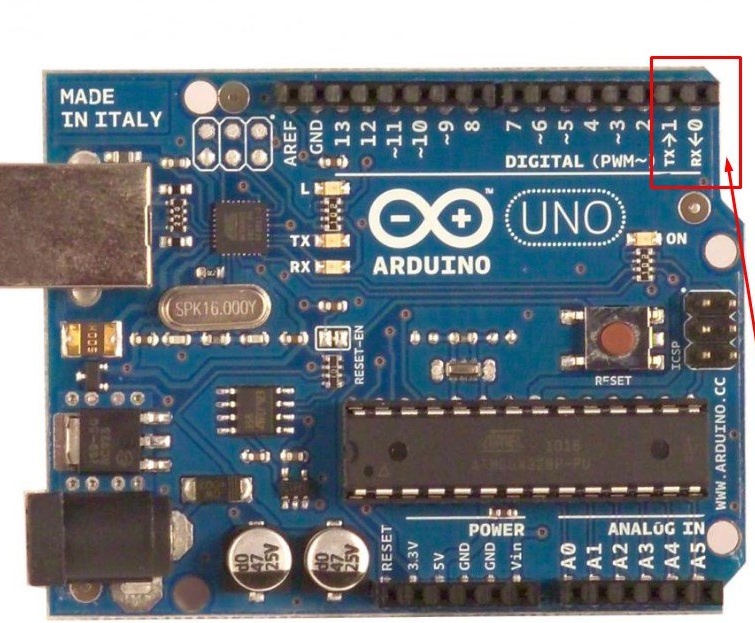
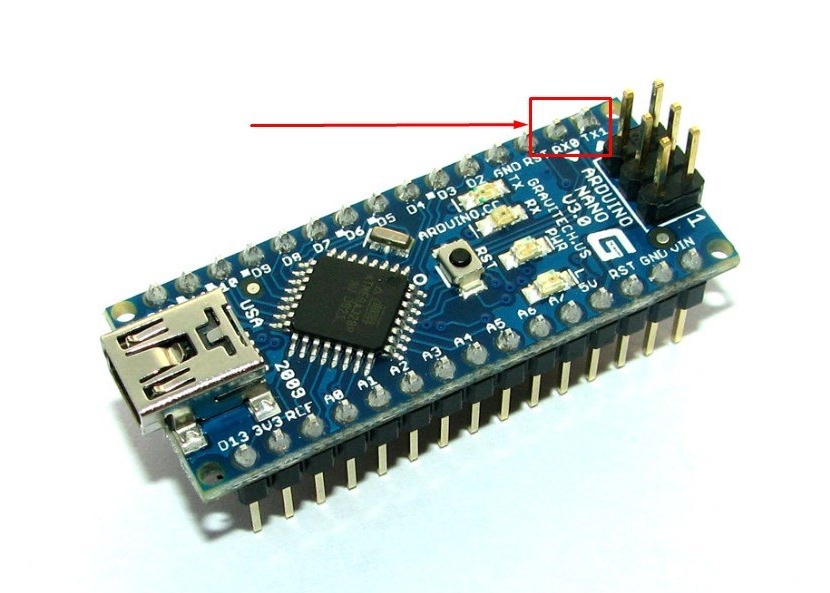
Semua papan Arduino bermula dalam siri ini Nanomempunyai antara muka USB. Siri Mini dan Pro mini ia tidak mempunyai satu, dan secara eksklusif disebutkan Penukar TTL. Tetapi hakikatnya ialah mana-mana arduinka yang lain dijahit oleh pengaturcara ini. Sekiranya anda tidak memilikinya, saya amat mengesyorkan untuk membelinya, terutamanya kerana kos 50-60 rubel (pada masa penulisan), ini adalah pengaturcara sejagat yang boleh digunakan lebih daripada sekali. Sebagai contoh, dengan bantuannya, saya membongkar peralatan kawalan radio FlySky i6 dan walkie-talkie Kenwood T2000, tanpa membeli programmer berjenama khas, yang lebih mahal. Tetapi saya berpindah dari topik ini. Pada umumnya, semua papan arduino mempunyai kesimpulan Rx dan TX (ini antara muka komunikasi, "penghantaran / penerimaan"), dengan mana anda boleh menghidupkan arduino dengan melepasi cip antara muka USB. Namun penukar ini mempunyai versi yang berbeza. Apabila saya membeli tambang, yang paling biasa dan paling murah adalah penukar, tanpa output menetapkan semula. Keanehan pemrograman arduino oleh pemrogram seperti itu tepat pada akhir kompilasi dan permulaan pemuatan, anda perlu menekan butang set semula di papan. Di sini, kita memerlukan sedikit kemahiran. Sekiranya anda terlepas kali pertama, terus tekan butang dengan frekuensi kira-kira 2 saat. Rabu memberikan 10 permintaan, jika anda boleh masuk ke salah satu daripada mereka - voila, kami bertanya arduino. Lebih banyak pengaturcara moden mempunyai pin kelima, yang menghubungkan dengan tetapan semula yang sama, dan menarik secara automatik. Tetapi yang paling penting, saya menerangkan nuansa. Satu lagi masa. Biasanya, RX perlu disambungkan ke TX dan sebaliknya. Tetapi dalam kes yang jarang berlaku (baik, orang Cina), anda perlu menyambung RX ke RX, dan TX ke TX. Tanda yang salah. Dan jika ini tidak membantu, pergi ke kaedah 3.
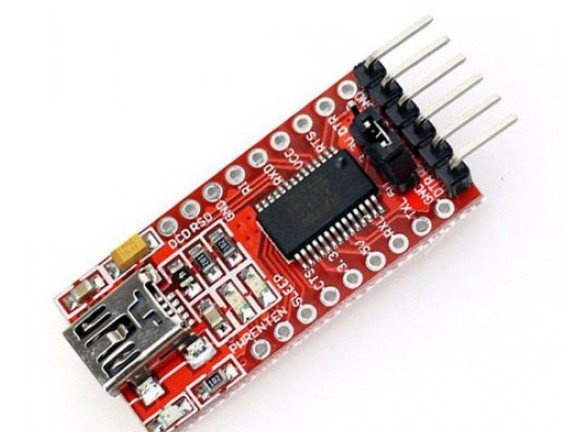
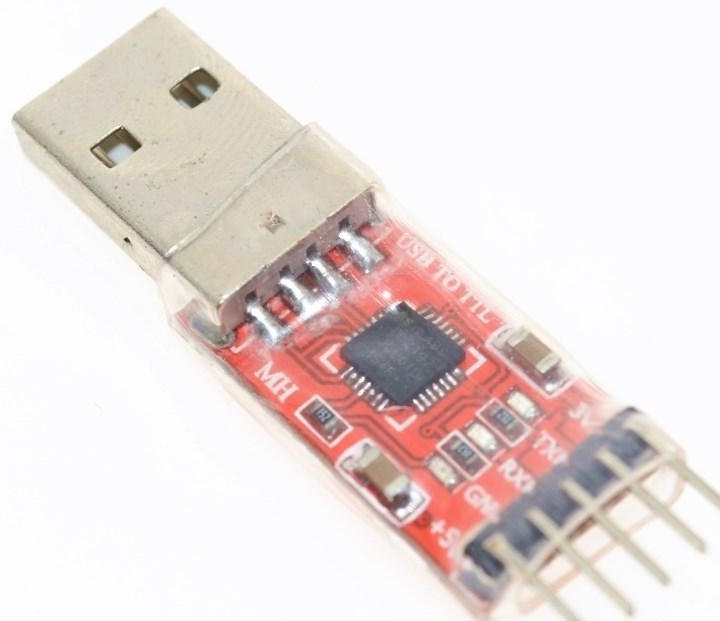
Tetapi letakkan saja kayu api untuk CP2102
Ciri-ciri
Pemrogram memerlukan pemasangan pemandu, saya tidak mempunyai masalah dengan ini, tiada yang lain perasan, hanya letakkan pemandu pada CP2102, atau yang ditawarkan oleh pengilang.
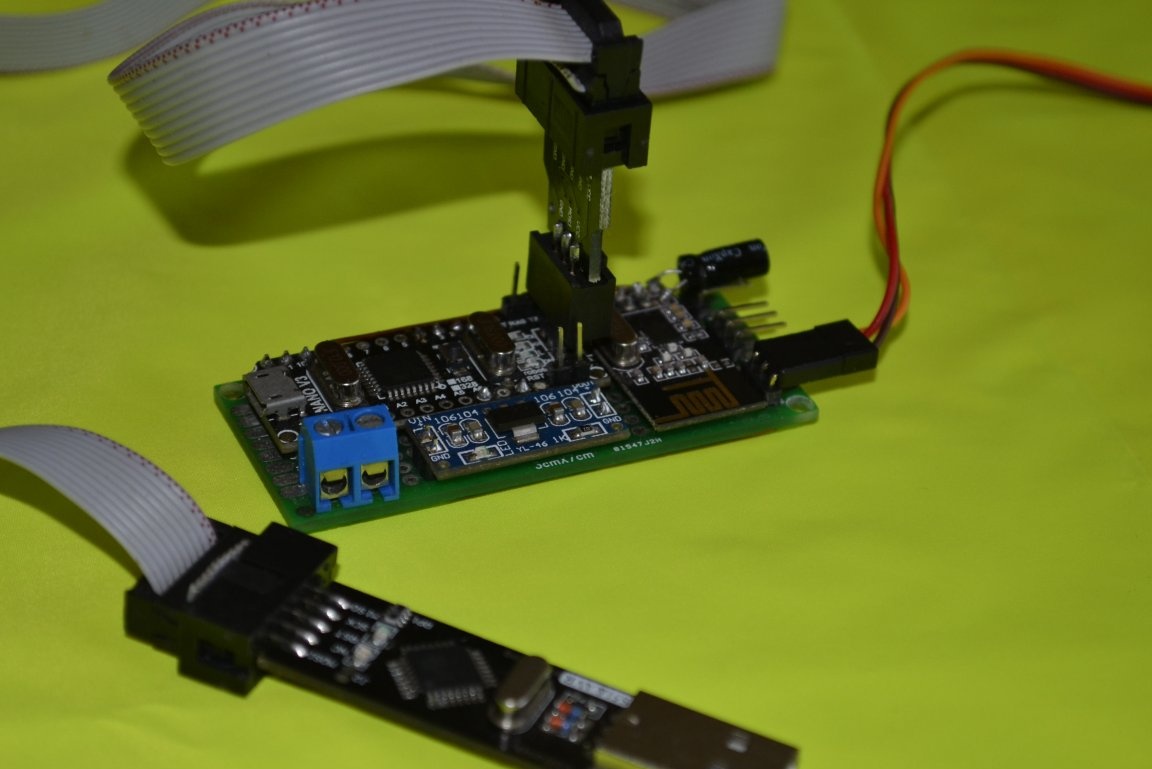
Kaedah 3. Pengaturcaraan cip langsung
Sejak versi Nano Papan Arduino mempunyai penyambung pengaturcaraan litar ISP . Ini adalah penyambung enam pin, yang, sebagai peraturan, tiada siapa yang memberi perhatian kepada. Dengan itu, anda boleh menyalurkan mikropengawal secara langsung, secara langsung, memintas semua yang hanya boleh dilewati, kedua-dua bahagian fizikal dan perisian. Itulah bagaimana saya perlu menyalakan papan arduino terkini saya. Sebenarnya, dengan menggunakan kaedah ini, anda boleh membuat klon arduino anda sendiri dengan menghidupkan bootloader Arduino di atmega. Saya menulis mengenai perkara ini dalam artikel saya mengenai avionik roket sukan. Tetapi sekali lagi, bukan tentang itu. Untuk perisian tegar, anda memerlukan pengaturcara jenis ini:

Ia biasa USBasp, pengaturcara mikropengawal AVR yang paling biasa. Ia membebankan wang yang sama.
Ciri-ciri
Programmer mempunyai penyambung 10-pin standard, namun, anda boleh membeli penyesuai 6-pin di dalam kit. Sudah tentu, anda boleh menjadikannya sendiri atau hanya menyambungnya dengan wayar, tetapi lebih mudah dan lebih mudah.
Perisian firmware tidak dijalankan secara standard. Untuk bermula, pergi ke Alat> Pemrogram> USBasp
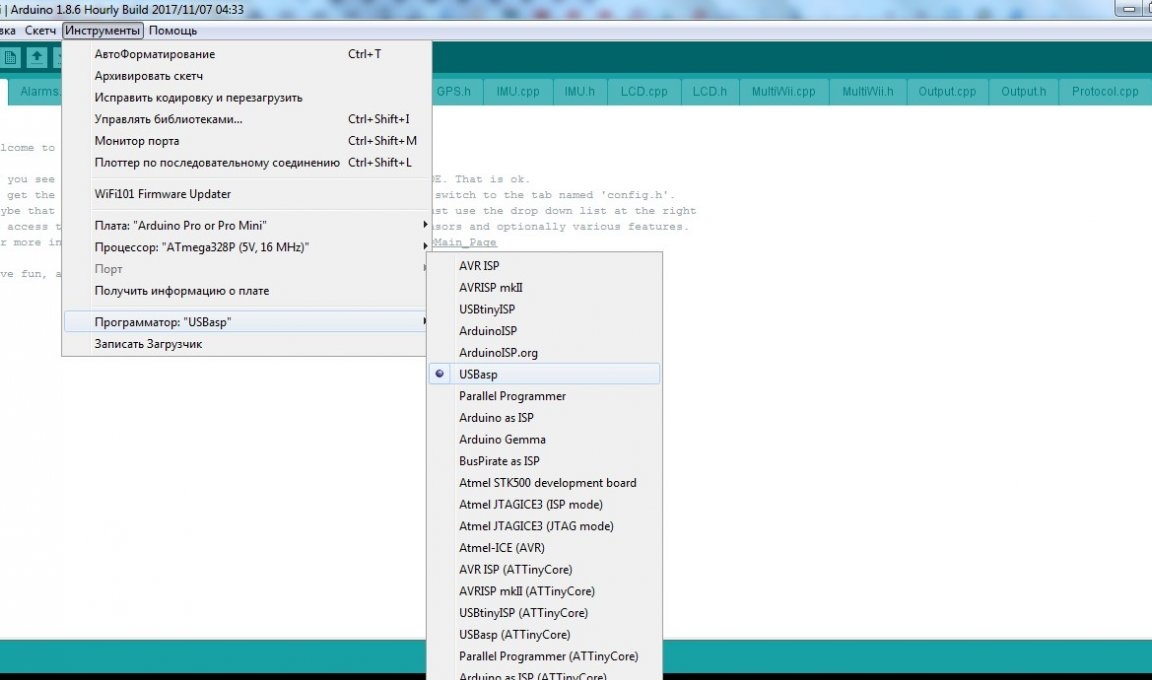
Seterusnya Lakaran / muat turun melalui programmer.
Masalahnya
Seperti yang saya katakan, di sini saya menerangkan masalah yang saya hadapi. Pengaturcara ini juga memerlukan pemandu. Mencari mereka tidak sukar. Walau bagaimanapun, apabila menghubungi orang Cina untuk menjimatkan wang, anda perlu bersedia untuk giliran yang tidak diduga. Secara peribadi, ketika bekerja dengan pengatur program ini, saya mengalami masalah berikut, yang pernah saya jelaskan pada sel radio:
avrdude.exe: ralat: tidak dapat mencari peranti USB "USBasp" dengan vid = 0x16c0 pid = 0x5dcBeliau berjuang untuk masa yang lama untuk menyelesaikan bencana itu, dan mendapati hanya dalam forum asing. Dan sebagainya:
1) Mengikuti pautan Muat turun arkib LibUSB-64bit.zip
2) Kami menyambung programmer ke port USB.
3) Buka arkib dan pergi ke laluan di mana mereka membongkar \ LibUSB-64bit \ libusb-win32-bin-1.2.1.0 \ bin \ x86
4) Jalankan inf-wizard.exe
5) klik Seterusnya
6) Pilih USBasp dan klik Seterusnya
7) Bidang berikut diisi dengan cara ini:
Klik Seterusnya
8) Simpan fail yang dihasilkan di sepanjang jalan:
LibUSB-64bit \ libusb-win32-bin-1.2.1.0 \ bin \ amd64 - jika anda mempunyai sistem 64-bit atau
LibUSB-64bit \ libusb-win32-bin-1.2.1.0 \ bin \ x86 - jika 32-bit
9) Klik pasang sekarang
10) Sistem akan memberitahu bahawa pemandu tidak dari sumber yang dipercayai. Klik "Pasang Lagi"
11) Pemasangan pemandu akan bermula. Semasa pemasangan, kami mendengar bunyi memecahkan dan menyambungkan peranti USB. Pada akhir pemasangan, klik OK.
Beberapa tip lagi
Modul NRF24L01 yang sangat biasa mempunyai jambatan besar. Untuk pengendalian modul biasa dan stabil ini, adalah perlu untuk menggantung kapasitor sekurang-kurangnya 10 μF 5 V untuk kuasa. Kurang tidak wajar, lebih tidak berguna. Tetapi jika tidak pada 10, tentu saja, taruhan pada 22 atau 47. Ia juga dinasihatkan untuk menggantung seramik lain pada 10-100 nF selari dengannya. Lebih-lebih lagi, sedekat mungkin dengan modul itu sendiri, idealnya - kepada kesimpulan. Jika tidak, modul itu seolah-olah dilihat, tetapi biasanya tidak dihantar.
Jika penemuan Rx dan TX beberapa alat pelaksana digantung - arduinka tidak akan dijahit. Kilat pertama, kemudian hubungkan peranti yang diperlukan untuk output ini.
Itu sahaja, saya berharap maklumat itu berguna kepada seseorang.
Nasib baik kepada semua orang dalam kerja anda!