

Salam penduduk laman web kami!
Kali ini AlexGyver, pengarang saluran YouTube dengan nama yang sama, tentang percutian, yang, dengan cara itu, kami tidak suka, memutuskan untuk mengulangi Projek Adafruit - Mata bionik yang dimasukkan ke dalam gelas pengimpal gas.

Dari sudut pandang kod, projek selesai ini sama sekali tidak menarik, penulis tertarik dengan mekanisme, iaitu sistem koordinatnya.
Kami akan kembali kepada ini, tetapi sedikit kemudian, tetapi pertama, mari kita kumpulkan semua mekanik dan sambungkan segala-galanya elektronik komponen.
Untuk mengulangi projek ini, anda memerlukan:
1) gelas pengimpal gas. Anda boleh menggunakan kedua-dua logam dan plastik.

Plastik pasti lebih baik, tetapi sudah tentu mereka tidak boleh bermegah dengan kualiti. Khususnya, dalam contoh ini, diperbuat daripada plastik, kedua-dua pihak secara harfiah jatuh segera dan pengarang terpaksa melekatkannya.

Gelas seperti ini boleh dibeli di alat jualan kedai atau bahan binaan. Penulis membelinya di All Instruments store.
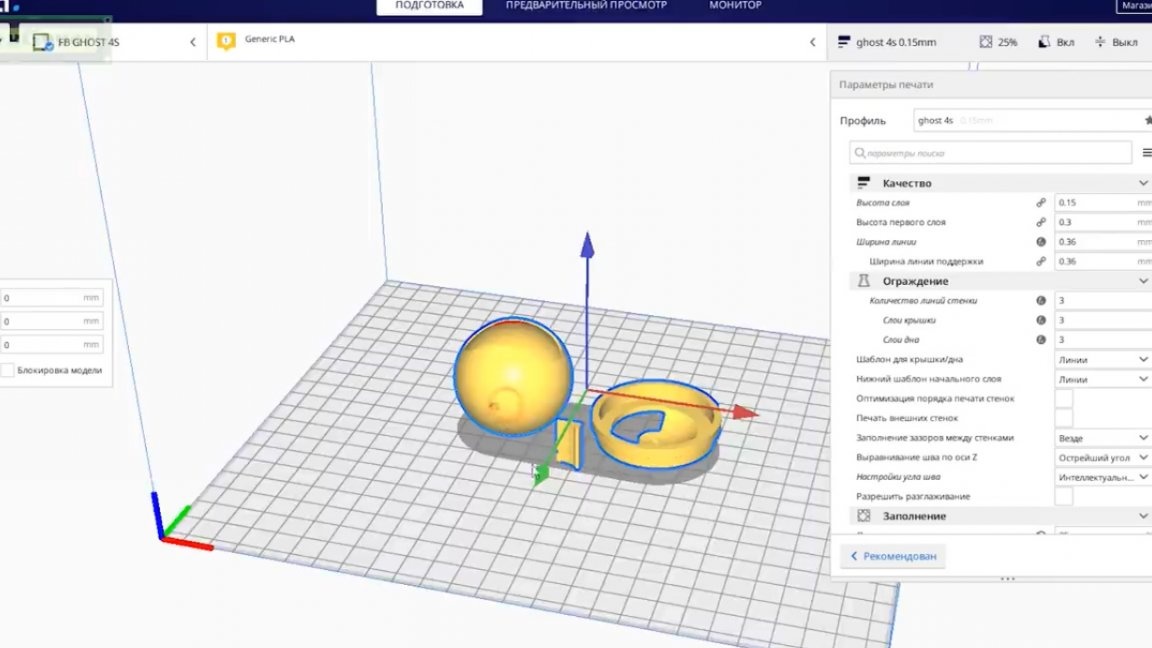
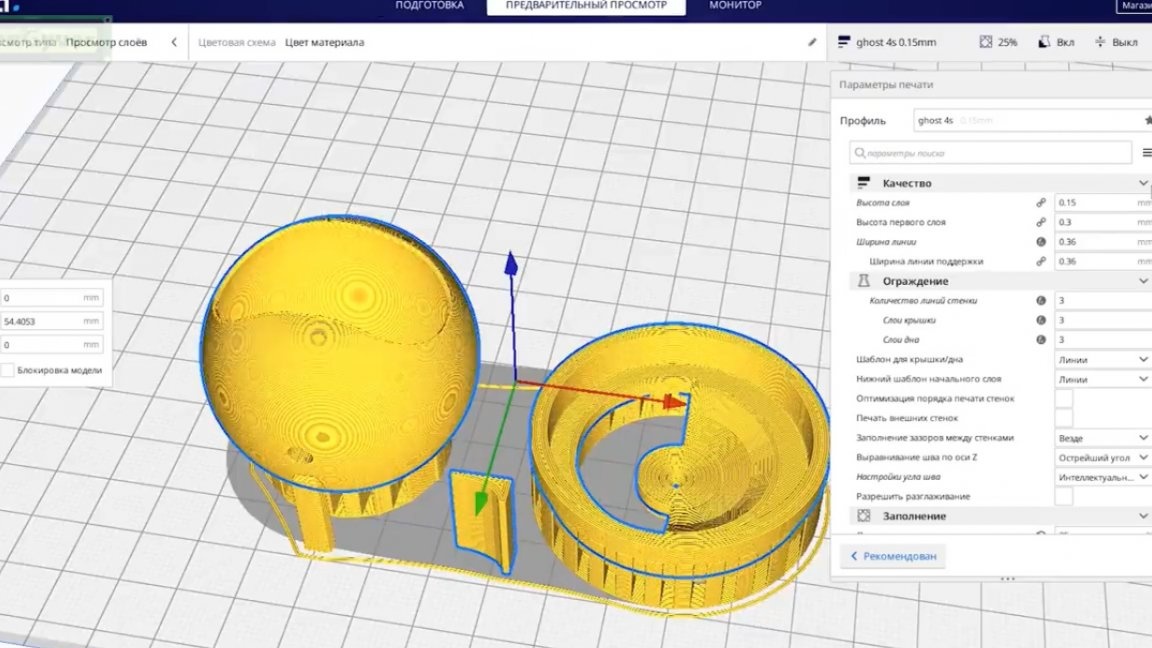
2) Seterusnya kita perlu dicetak pada Pencetak 3D alat ganti.
Penulis mencetak unsur-unsur dengan plastik PLA putih pada pencetak 3D hantu terbang 4-bit 32-bit baru. Fail mengandungi semua 3 model sekaligus. Percetakan diperlukan dengan sokongan.

3) Komponen seterusnya yang diperlukan untuk projek khas Halloween kami adalah platform Arduino Nano Models.

4) Juga diperlukan bateri lithium ion:
5) Tingkatkan penukar dc-dc (sehingga 5V);
6) Tukar:

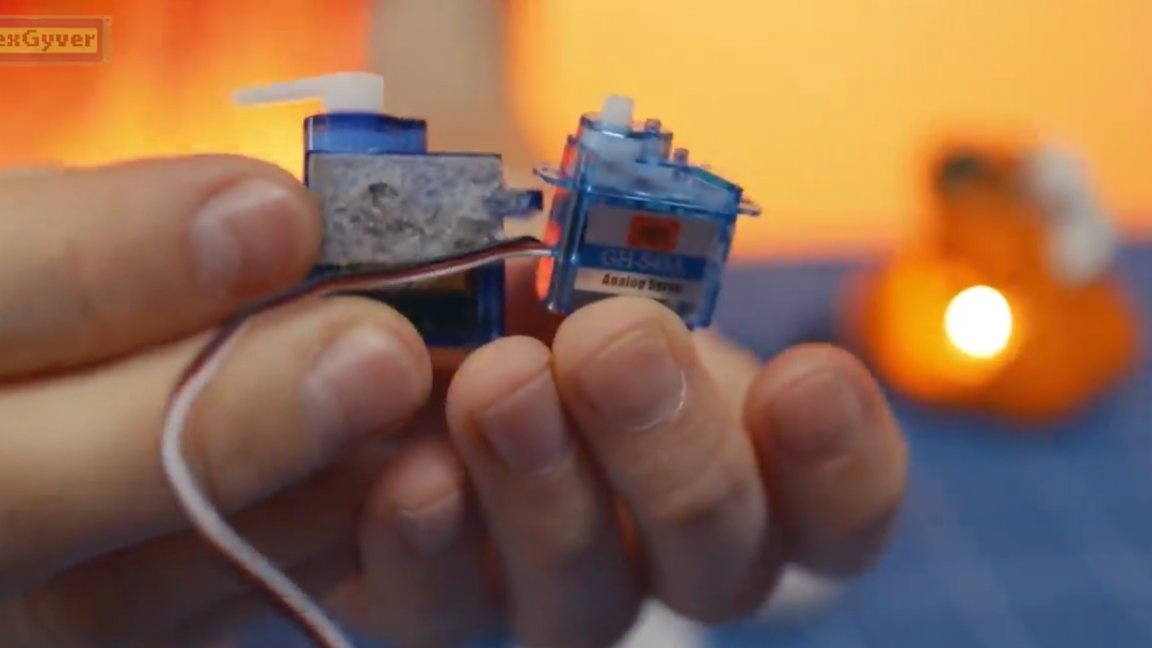
7) Servos mikro, tetapi tidak standard 9 gram, tetapi juga kurang:
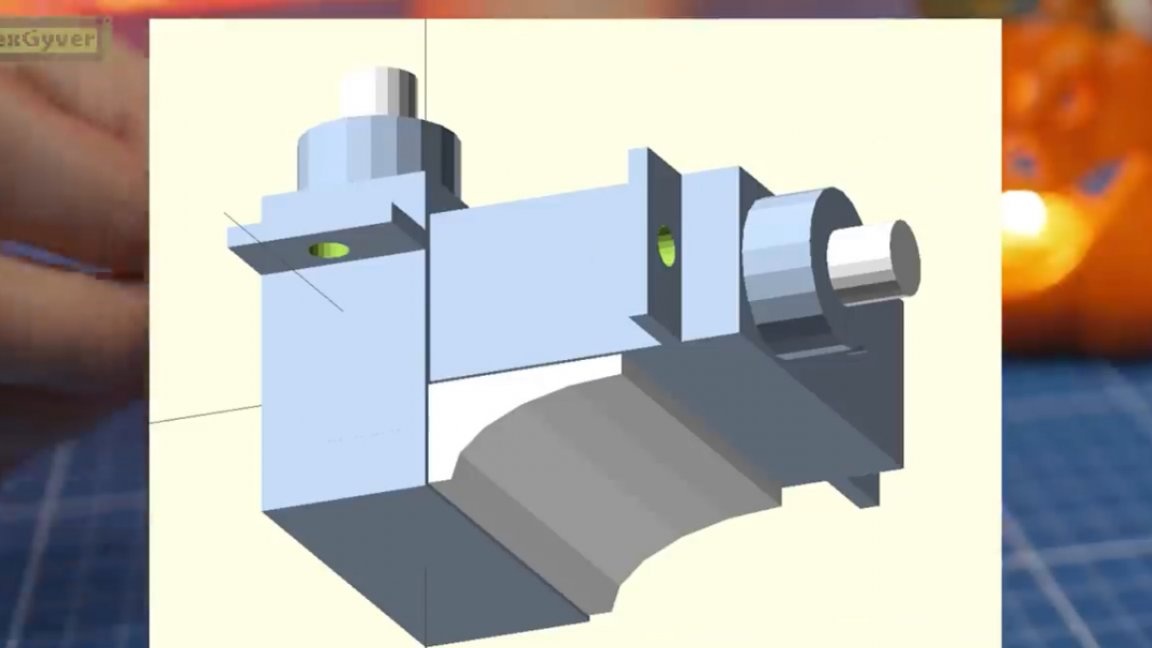
Jadi, dengan komponen yang diperlukan, semacam tahu, mari turun ke pemasangan peranti itu. Pertama, kita perlu memasang pemacu seperti berikut:
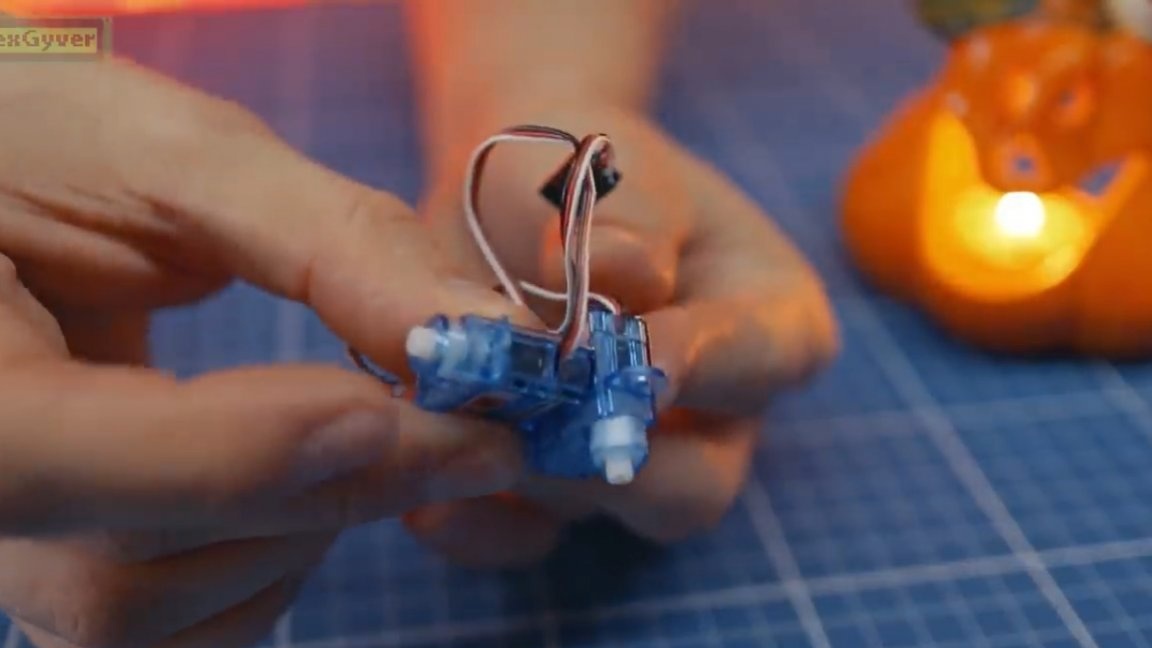
Berikut adalah gambaran yang lebih difahami:
Kami mengeluarkan pelekat, dan dengan bantuan superglue kami menyambung semuanya ini.


Dengan cara ini, servos Cina seolah-olah sedikit berbeza daripada orang-orang Adafruth, dan anda perlu menggelapkan mereka seperti ini, dengan sedikit mengimbangi:
Telinga mesti dikeluarkan, mereka akan campur tangan.
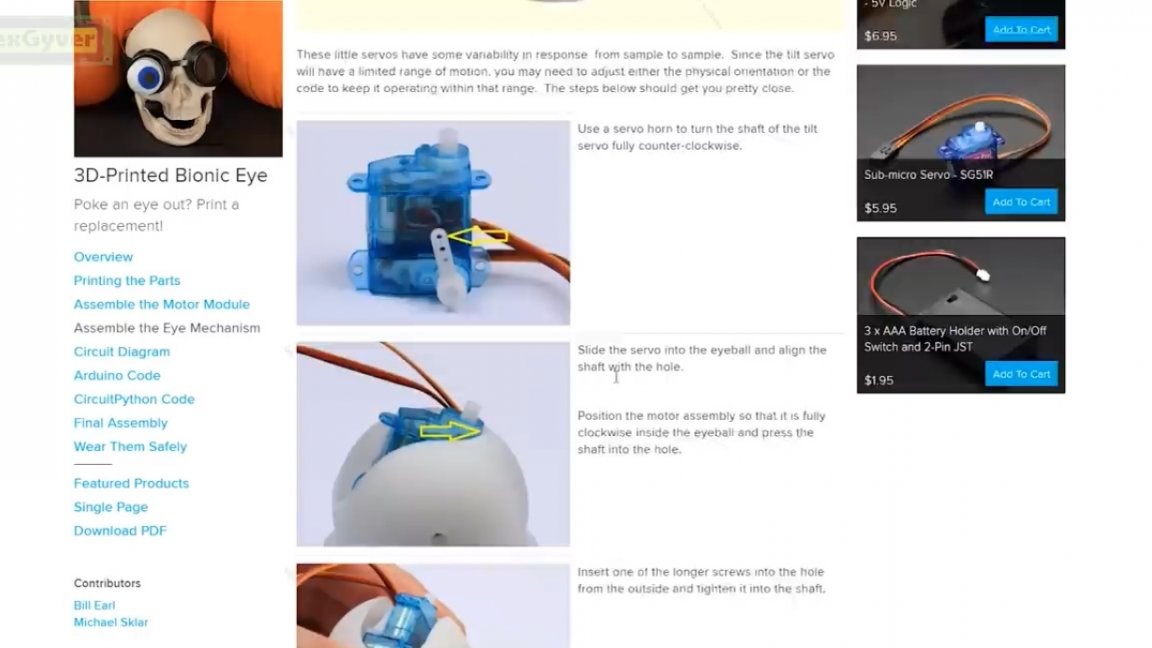
Kemudian ke pemacu yang lebih rendah, kami mengaitkan jumpelang itu dan menghidupkan poros dengan lawan jam.

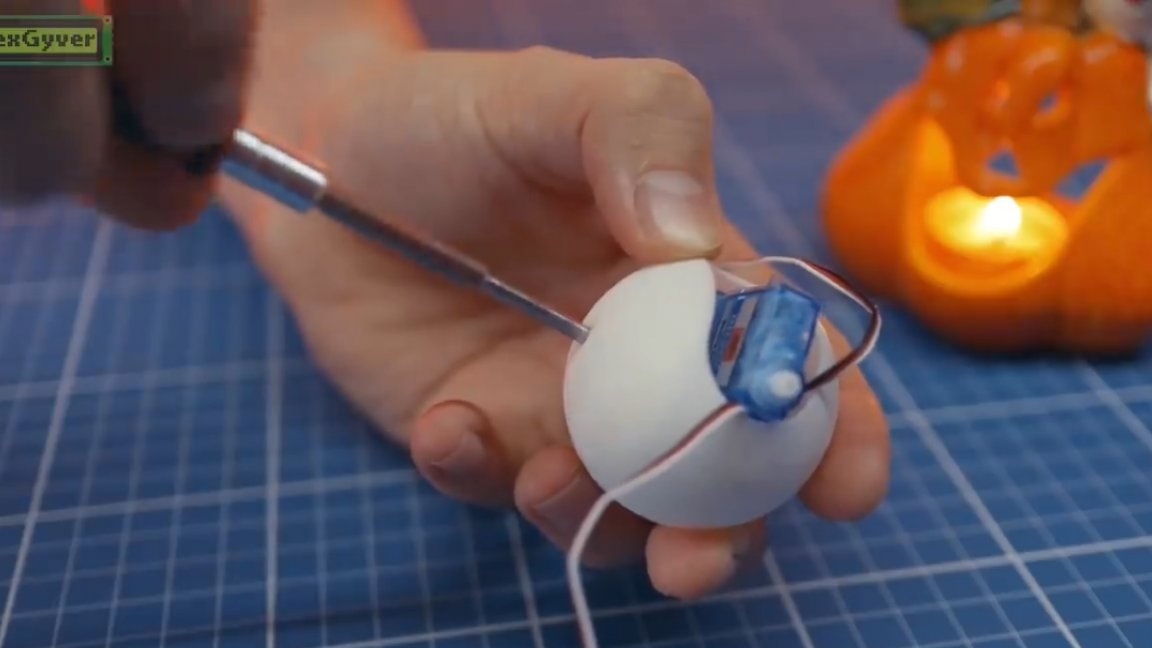
Masukkan servos ke dalam pra-cetakan Pencetak 3D kosong (mata).
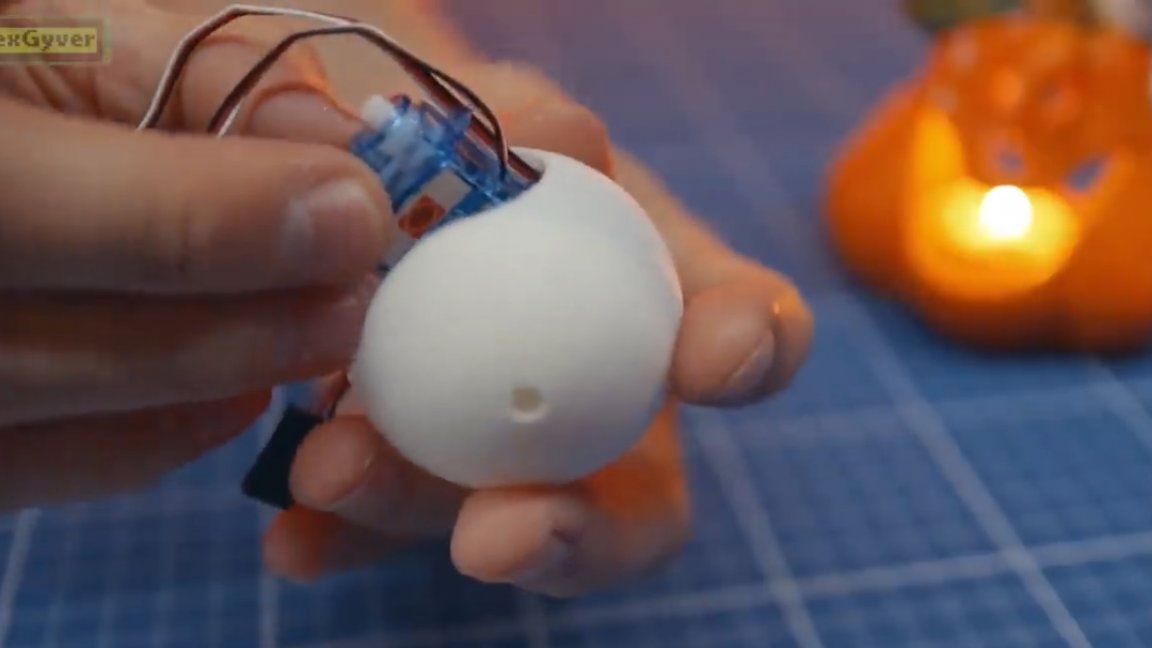
Kami mencapai pemacu menonjol ke tepi, dan memasukkan aci keluaran ke dalam lubang di dalam mata.

Skru yang lengkap perlu dipendekkan sedikit. Ini boleh dilakukan menggunakan nippers.

Kemudian, menggunakan skru yang dipendekkan, kami menetapkan pemacu dalaman.
Jika anda mempunyai pemeriksa servo, anda boleh mengesahkan kebolehkerjaan mekanisme yang terhasil.
Kemudian kita melampirkan bahagian kedua mata ke batang pemacu kedua dan juga mengikatnya.

Kami yakin prestasi keseluruhan (harus bekerjasama).


Terutama untuk projek ini, penulis menulis kod ringkas yang lancar memutar pemacu pada sudut rawak. Tetapi pusat mata agak berat sebelah, jadi kita dapati pusat sebenar dan menarik pelajar itu.

Nah, kerana ini adalah projek percutian, dan bercuti itu agak spesifik, maka mari membuatnya lebih dahsyat.

Seterusnya, masukkan bahagian yang dihasilkan ke dalam cermin mata.

Jika ia tidak dimasukkan, ia perlu untuk berbunyi sedikit.

Kemudian kami meletakkan semuanya bersama-sama.


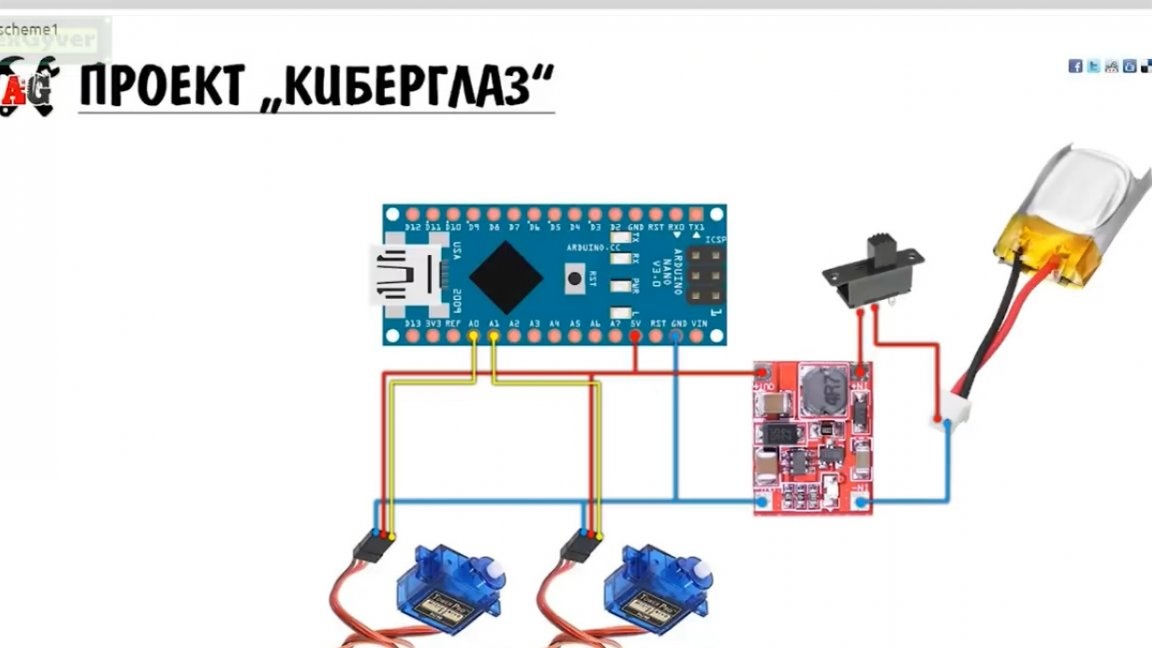
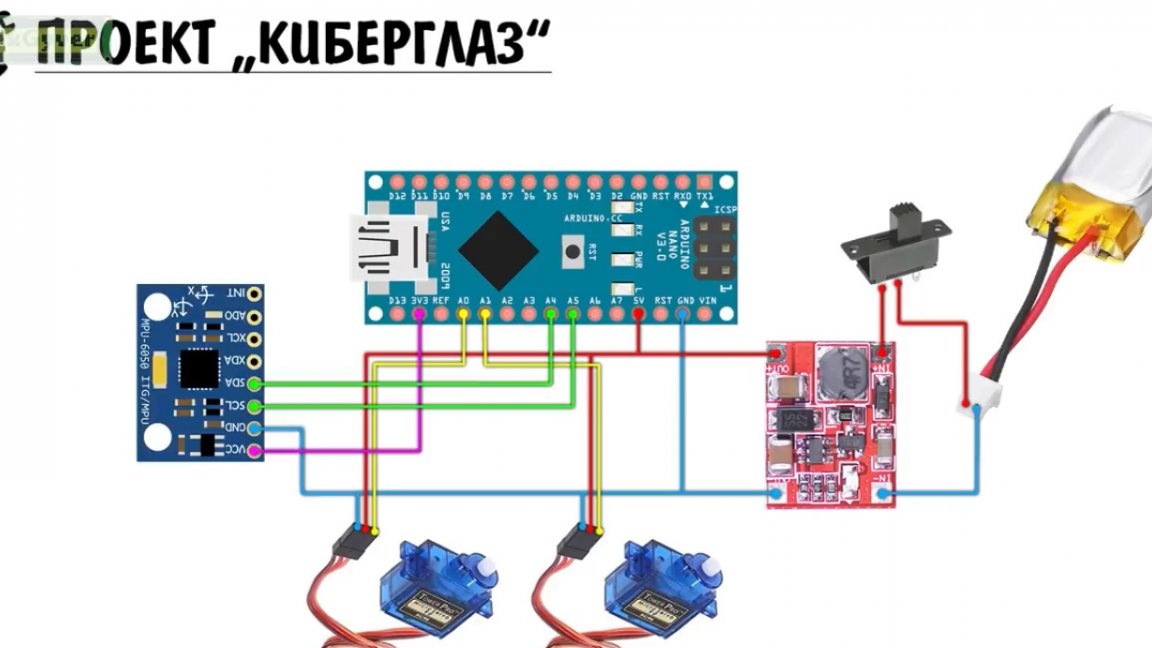
Seterusnya, kami sambungkan semua komponen mengikut skim berikut:
Segala-galanya sudah siap, tetapi sekarang kita mempunyai setiap pemacu hanya naik ke sudut rawak, dan pada dasarnya anda boleh meninggalkannya seperti itu.

Tetapi ingat pada awal artikel itu disebutkan mengenai mekanisme dan sistem koordinat? Oleh itu, mekanisme itu berputar sepanjang dua paksi, tetapi tidak di sepanjang mata manusia yang berputar. Matlamat kami adalah untuk membuat mekanisme sedemikian berkelakuan seperti mata manusia. Pada pandangan pertama ini nampaknya mustahil, tetapi anda boleh cuba untuk membawa sistem koordinatnya normal sehingga anda dapat meletakkan murid dalam posisi yang diinginkan.
Oleh itu, kami mempunyai dua sudut, kami menandakan mereka dengan X dan Y.

Y adalah sudut kecil mata, dan X adalah sudut putaran mata sebanyak 180 darjah.
Untuk mencapai semua jawatan yang mungkin diperlukan untuk mengawal kedua-dua sudut, dan terdapat kekhususan. Mari kita mulakan dengan gerak pekeliling paling mudah dengan radius maksimum.
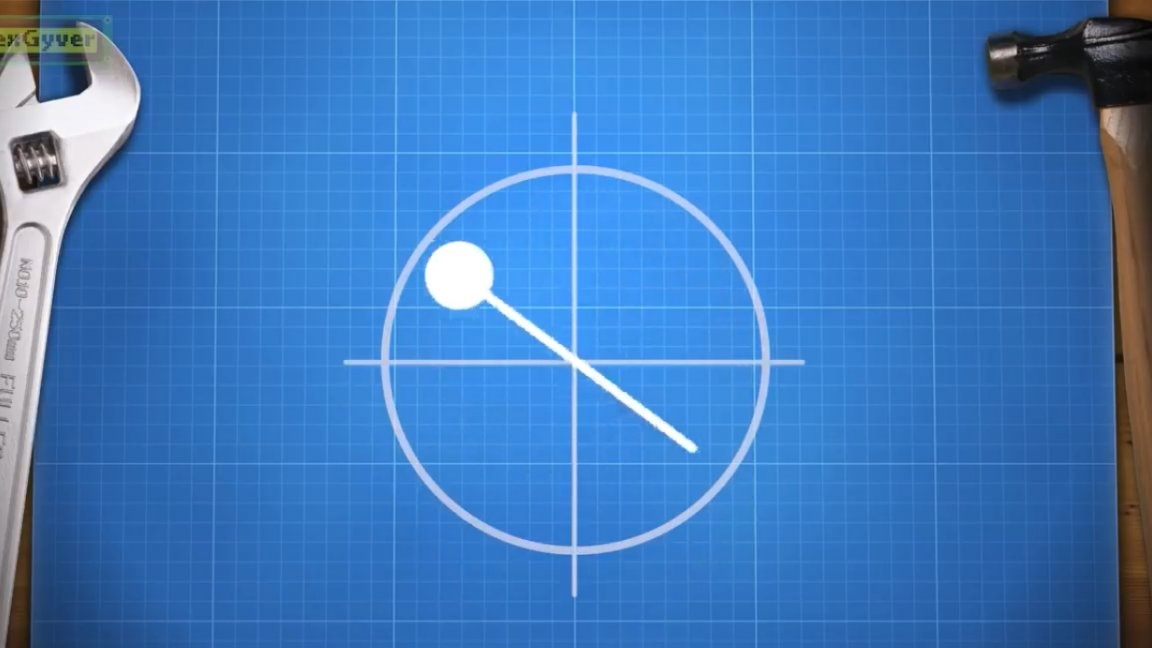
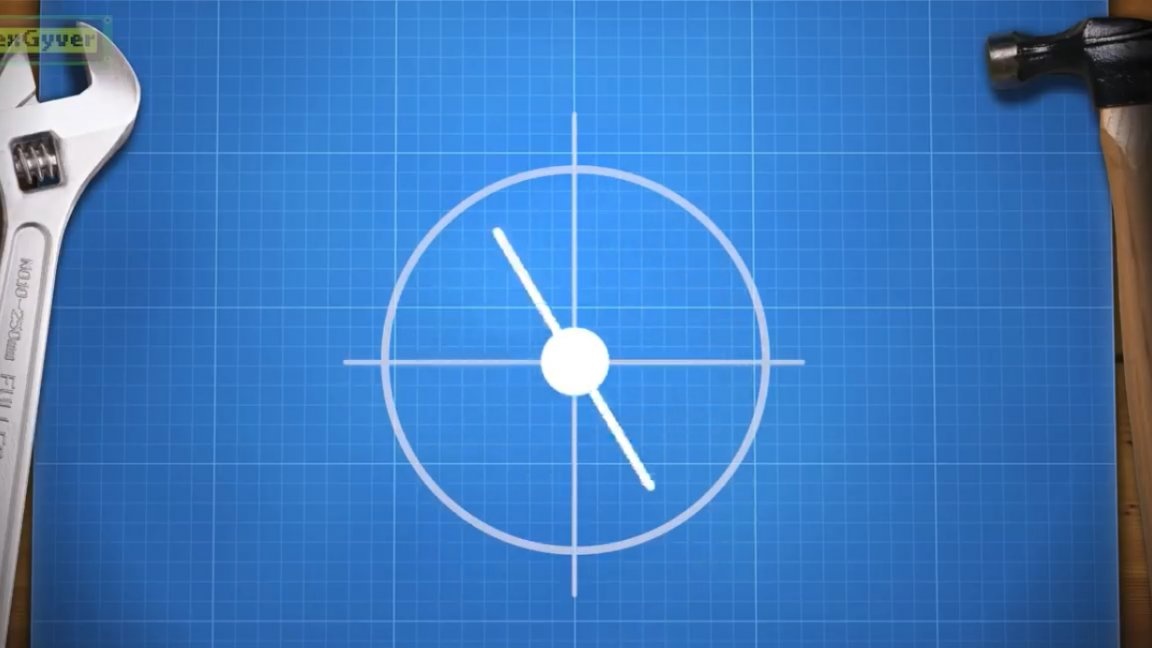
Tetapi ia tidak begitu mudah kerana ia kelihatan. Oleh itu, perkara pertama yang penulis lakukan adalah sistem koordinat kutub di mana anda boleh menetapkan sudut putaran mata dan jejari, iaitu, penghapusan murid dari titik pusat 00.
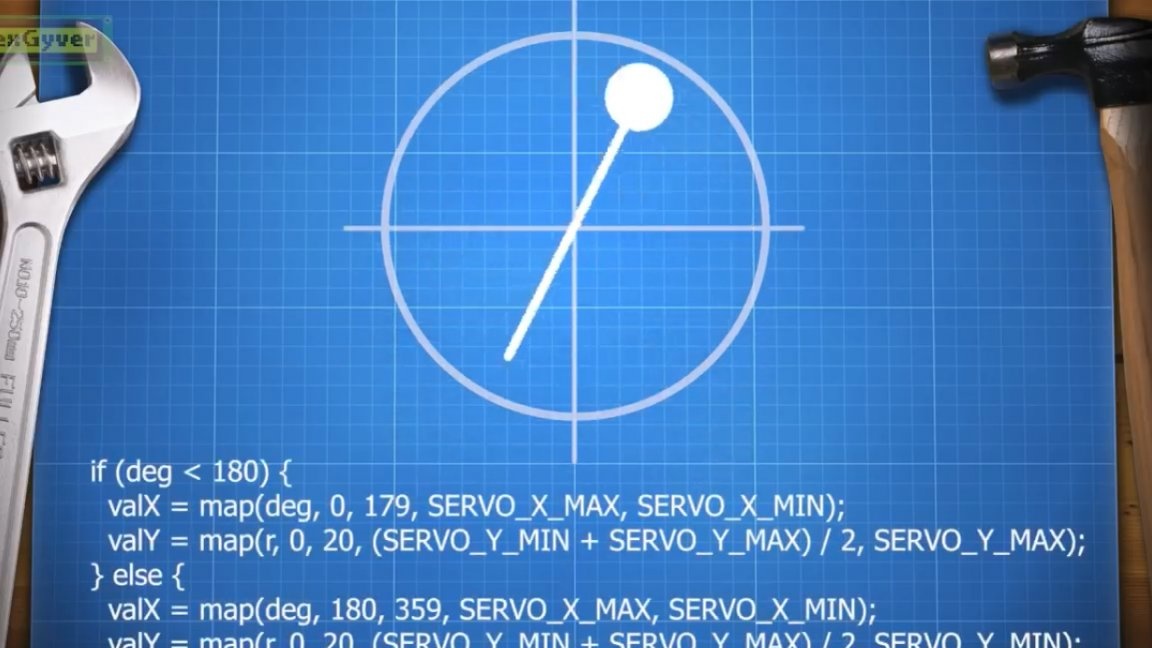

Dalam separuh bulatan atas, kita bekerja dari separuh sudut Y ke nilai maksimumnya, dan di bawah - dari minimum hingga separuh. Sekarang pergerakan mata boleh diprogramkan dengan cara yang lebih menarik. Pergerakan diri mereka rawak, tetapi sudah di sekitar lilitan.


Kini mari kita meminjam semua elektronik, segalanya seperti dalam rajah:
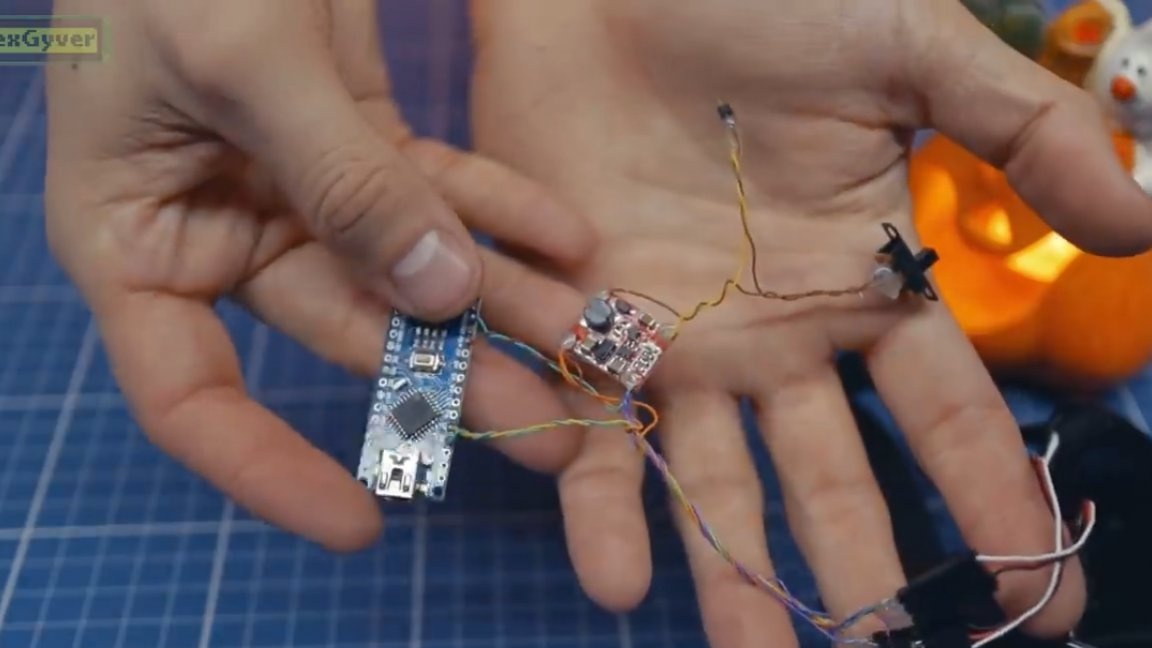
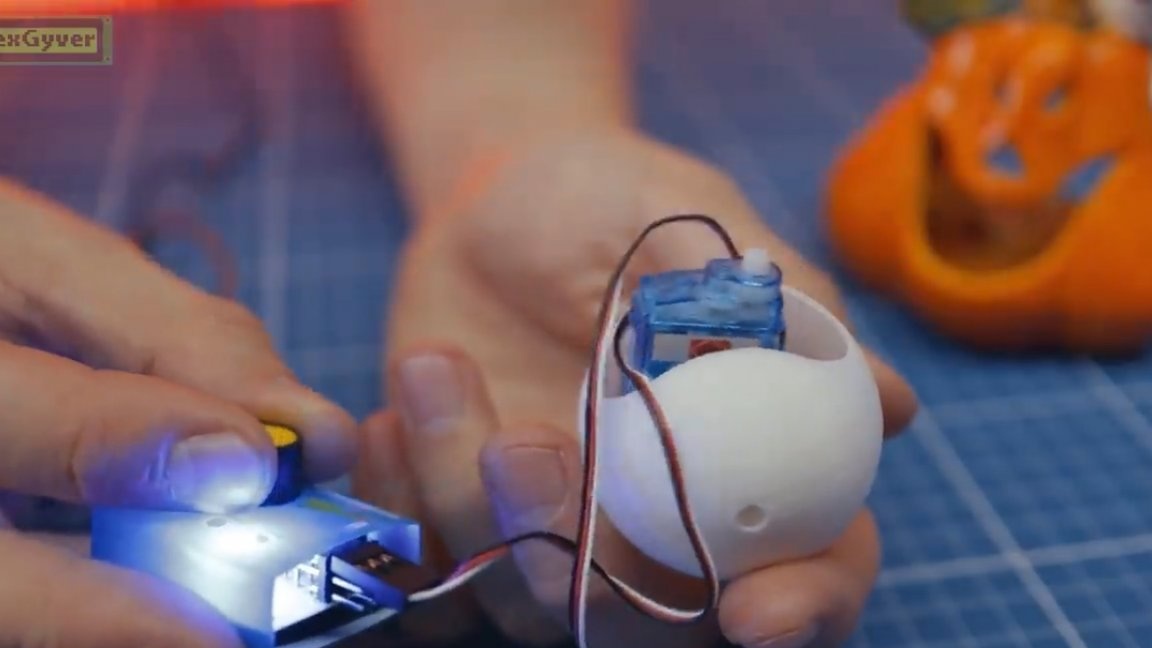
Cuba untuk menghidupkannya.
Petunjuk adalah. Sekarang kita menyembunyikan perkara ini dalam beberapa jenis bangunan (dalam kes ini, penulis menggunakan kotak tick-to-tac).

Semua mata siber kami siap. Berikut adalah jenaka seperti itu.


Tetapi mari kita teruskan penyelidikan teoretikal kita dan terjemahkan sistem koordinat polar ke Cartesian, kemudian saya akan faham mengapa.

Segala-galanya mudah di sini, fungsi atan2 akan membantu kita, yang mengembalikan sudut dalam radian dari -P ke P, dan fungsi hipotek, yang akan mengira panjang hipotenus dalam dua koordinat yang sama, dan hipotenus adalah jejari untuk fungsi sebelumnya.

Dan dengan cara yang mudah, subjek eksperimen kami kini boleh menghidupkan mata dengan tepat di mana kami memerlukannya (naik, turun, kanan, kiri).

Jadi mengapa ini diperlukan? Ini perlu untuk dapat menambah giroskopdengan bantuan yang mata akan berubah dalam arah yang sama seperti kepala, yang mungkin akan kelihatan agak lucu. Sebenarnya, projek itu telah ditambah giroskop mpu6050, ini adalah bagaimana ia kelihatan dalam gambar rajah:
Ubah kod itu, pastikan bacaan dari gyroscope membelokkan mata. Melalui penapis secara semulajadi.

Jadi apa yang kita dapat pada akhirnya? Mata sedikit terlambat di belakang pergantian kepala, dengan itu mewujudkan kesan bahawa ia menjadi betul dan kelihatan pada anda. Akibatnya, di sini adalah satu projek matematik kecil.

Firmware DI SINI. Terima kasih atas perhatian anda. Lihat awak tidak lama lagi!
Video pengarang: