
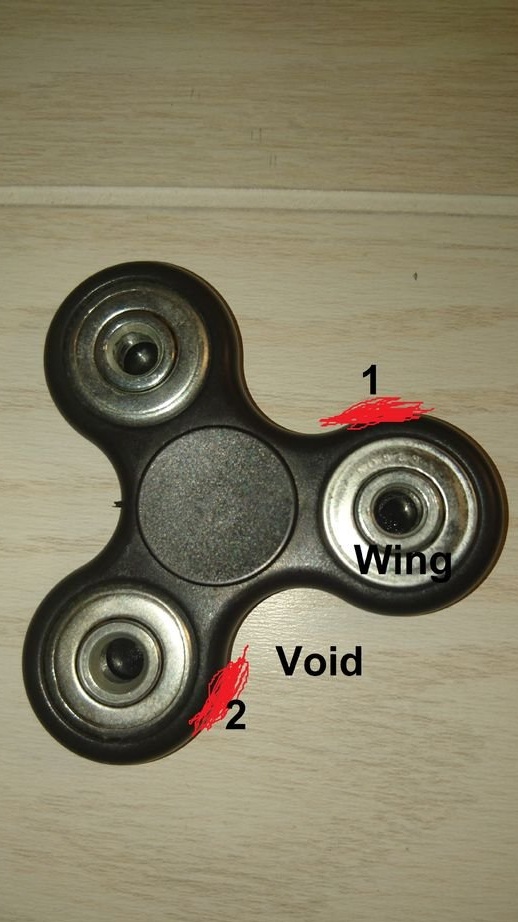
Puncak populariti pemintal datang pada tahun 2017. Pengilang dan penjual memahami bahawa gembar-gembur akan berakhir tidak lama lagi dan tiba-tiba kerana ia telah bermula. Peniaga berdiri di tempat-tempat yang sesak hampir setiap lima belas hingga dua puluh meter - dan seolah-olah mereka tidak bersaing antara satu sama lain sama sekali. Terdapat pembeli yang mencukupi untuk semua orang. Kemudian pengarang Instructables di bawah nama panggilan NagyD1 dicipta dan dibuat lakukan sendiri untuk tachometer spinner. Ia boleh digunakan untuk mengukur revolusi pemutar seminit.-1, kelajuan linear dalam m / s atau km / h, tempoh dalam ms. Hari ini, apabila pemutar, kerana hujung lengkap gembar-gembur itu, agak murah, tetapi ia masih kekal di rak kedai untuk jangka masa yang panjang, seperti buatan sendiri Ia juga menarik untuk diulangi. Dalam firmware tachometer, pemutar mempunyai tiga bilah. Sekiranya terdapat dua bilah, lakaran itu perlu redone sedikit. Juga, dalam mana-mana hal, ia perlu menunjukkan garis pusat pemutar. Dan untuk mengelak lubang-lubang dalam galas yang terletak di bilah untuk mendapatkan berat badan.
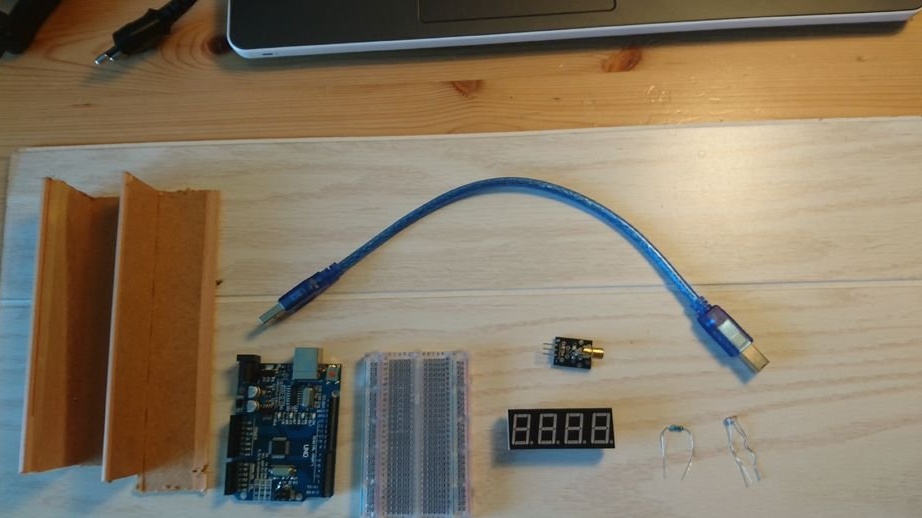
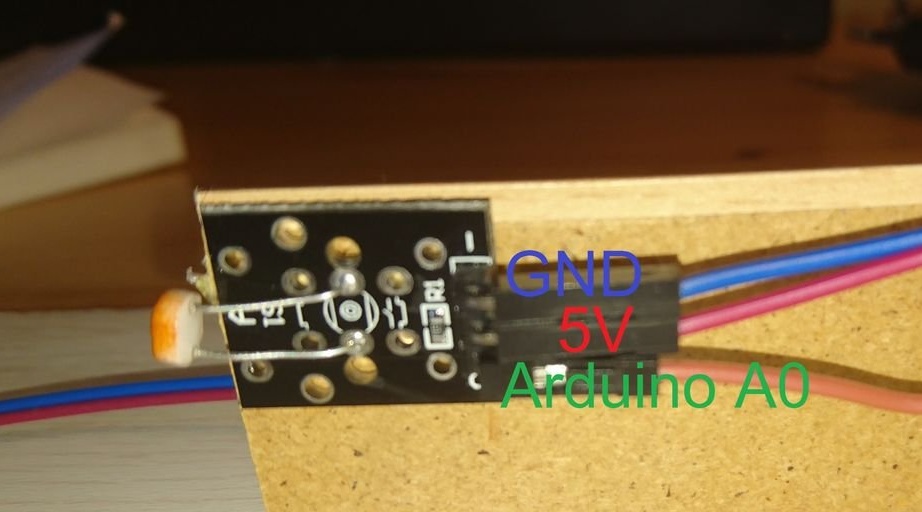
Bersempena dengan Arduino wizard itu memakai komponen dari set "Sensor, 37 dalam satu": modul dengan laser dan photoresistor. Untuk memaparkan hasilnya, paparan LED 4-bit dengan katod biasa disediakan, ia adalah pilihan, kerana anda boleh mengalihkan data ke komputer dalam pemantau port siri Arduino IDE.
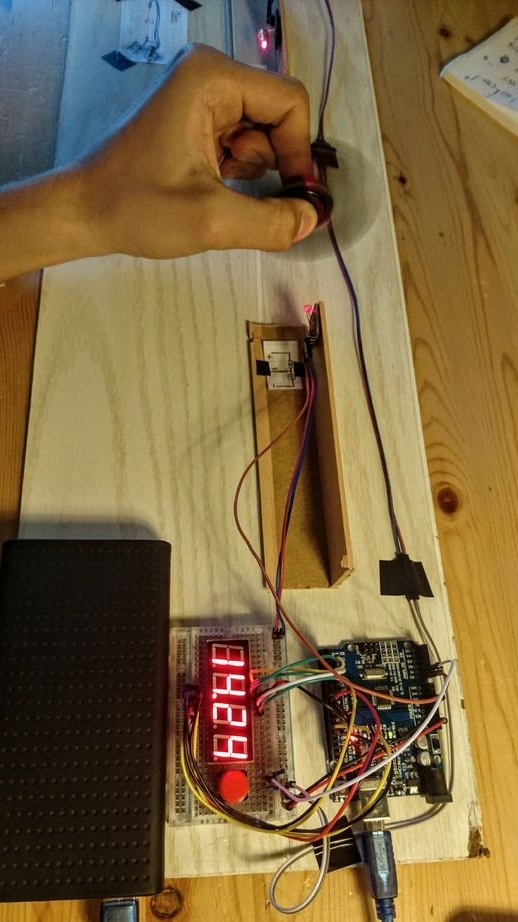
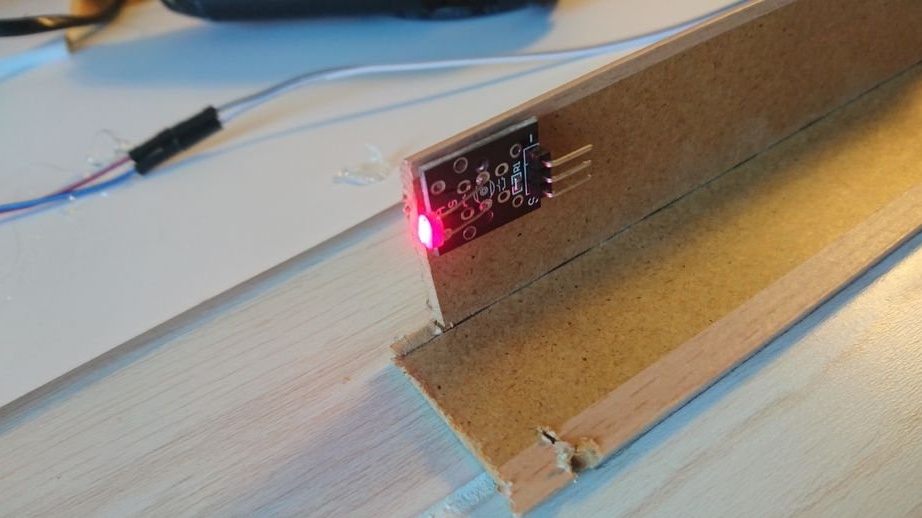
Tuan melampirkan sudut ke pangkalan, satu yang melekatkan modul dengan laser, ke yang lain - dengan photoresistor supaya mereka ditujukan ke arah satu sama lain. Semua yang lain elektronik dia meletakkan tepat di atas tanah.


Seals lubang di spinners (lihat di atas):

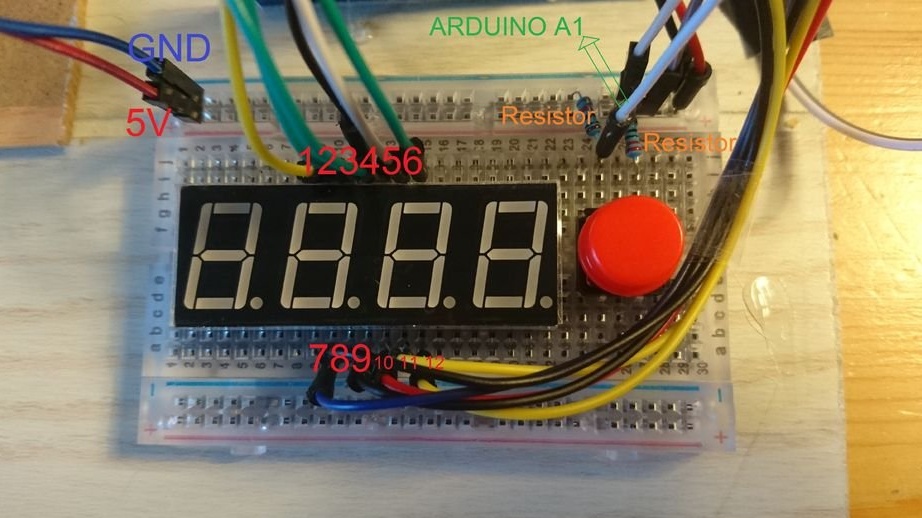
Menyambungkan photoresistor ke input A0 Arduino, butang - untuk memasukkan A1. Menarik kedua-dua perintang 10 kilo-ohm. Menyambungkan paparan seperti ini:
1 - kepada kesimpulan Arduino D2
2 - kepada kesimpulan Arduino D6
3 - hingga akhir Arduino D11
4 - untuk kesimpulan Arduino D3
5 - untuk kesimpulan Arduino D4
6 - untuk kesimpulan Arduino D7
7 - kepada kesimpulan Arduino D10
8 - untuk kesimpulan Arduino D9
9 - untuk kesimpulan Arduino D13
10 - untuk kesimpulan Arduino D8
11 - hingga akhir Arduino D12
12 - hingga akhir Arduino D5
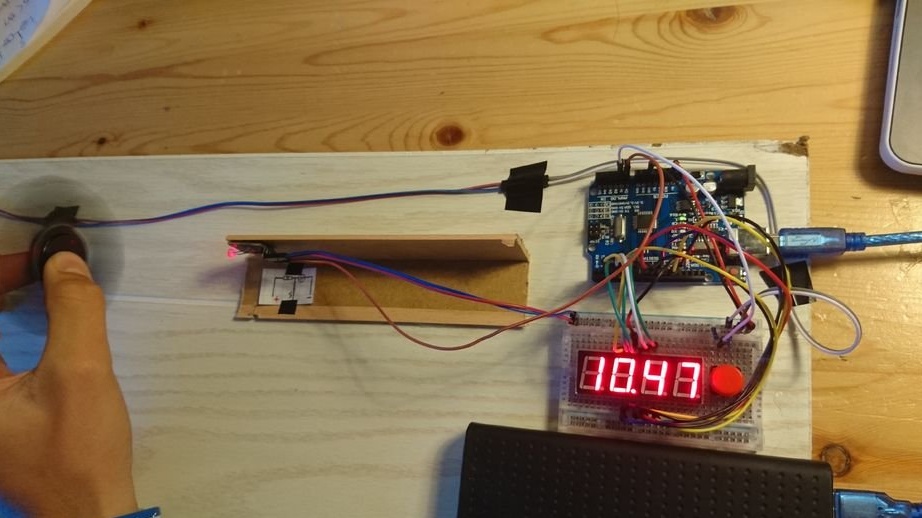
Membuat lakaran, di mana, sebelum mencurah, adalah perlu untuk membetulkan diameter pemutar dan bilangan bilah di dalamnya. Jika tiada paparan, alihkan output data ke monitor port bersiri. Jika dikehendaki, atur paparan jenis yang berlainan.
Selepas mengisi lakaran, tuan menguji peranti itu. Mod dihidupkan oleh butang pada cincin. Terdapat empat dari mereka: kelajuan, tempoh, kelajuan linear dalam m / s, dalam km / jam. Apabila pemutar dihentikan atau tidak hadir, paparan menunjukkan nama mod: masing-masing, FFFF, 7777 atau SSSS. Atas sebab tertentu, pengaturcara di seluruh dunia, ketika bekerja dengan memaparkan empat angka, berfikir dengan cara yang sama: bagaimana pula AAAA? Kedua-dua mod pengukuran halaju linear mempunyai nama yang sama, pembacaan berbeza sebanyak 3.6 kali.
Dan Exupery betul: orang dewasa sangat suka nombor. Walaupun spinners spinners.