

Selalunya di forum terdapat pertanyaan mengenai cara membuat robot kecil lakukan sendiri dari bahan buatan. Seseorang mahu menguji kekuatan dan kemahiran mereka dalam mencipta robot mini, dan seseorang hanya mahu mengejutkan kawan atau anaknya. Sebenarnya, semuanya agak mudah, anda hanya perlu menunjukkan sedikit kesabaran dan kebijaksanaan.
Kami bawa perhatian kepada video berikut:
Untuk membuat robot serangga kecil, anda perlukan:
- lampu taman (bateri solar);
- dua kapasitor;
- enjin;
- transistor VD135;
- transistor A733P;
- LED;
- perintang;
- besi pematerian;
- wayar tembaga;
- pisau;
- gam panas;
- klip kertas.
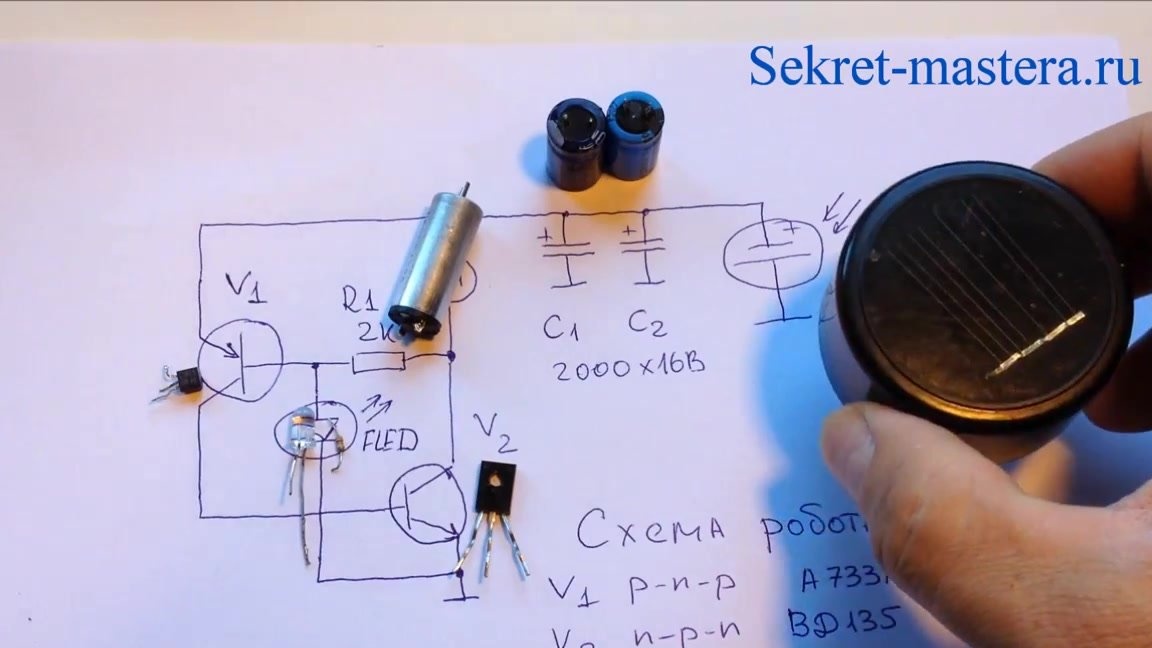
Kapasitansi setiap kapasitor adalah 2000 μF, diberi nilai untuk voltan 16V.
Enjin boleh digunakan dari berus gigi lama, dan anda juga boleh menggunakan enjin dari kamera filem lama.
Transistor yang kuat (ia dibenarkan untuk menggantikannya dengan transistor kuasa sederhana), struktur n-p-n, dalam kes ini akan menggunakan VD135.
Transistor kedua struktur p-n-p dalam kes ini akan menggunakan A733P.
LED berkelip memberikan kilat pada selang masa yang tetap.
2 kΩ perintang.

Selepas semua elemen radio yang diperlukan telah disediakan, kami dapat bekerja.
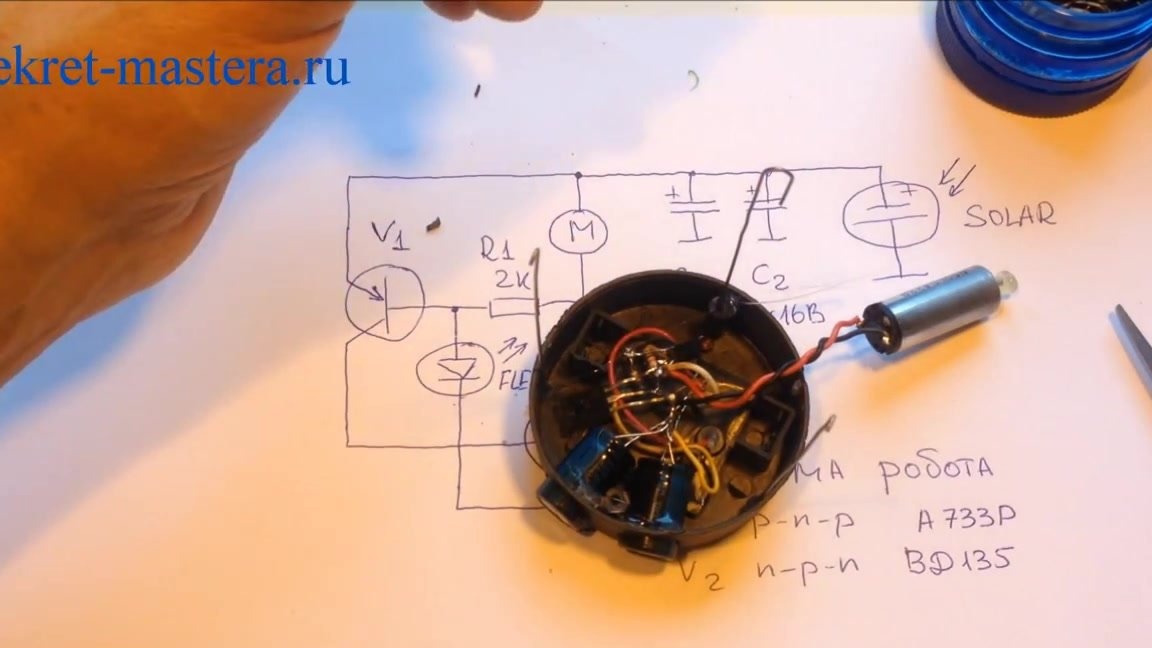
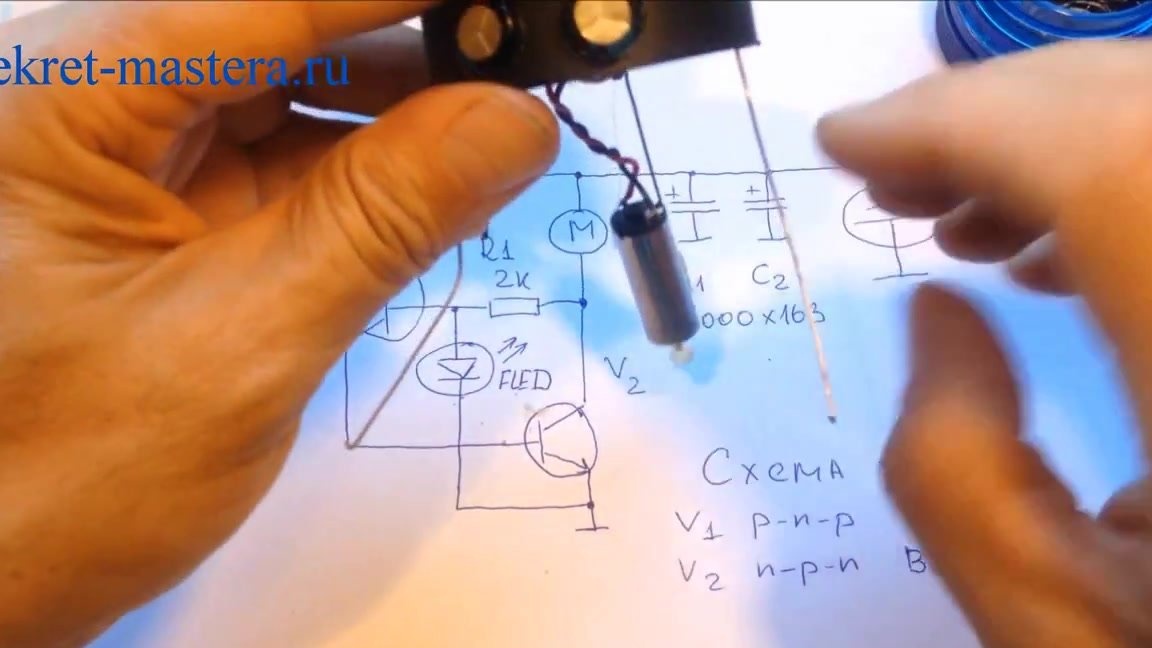
Prinsip kerja:
Tenaga dari bateri solar terkumpul pada dua kapasitor dan, dengan frekuensi tertentu, LED diaktifkan, yang membekalkan kuasa melalui transistor utama yang kuat ke enjin. Dalam kes ini, enjin melepaskan kapasitor dan melakukan beberapa gerakan putaran.
Perhimpunan:
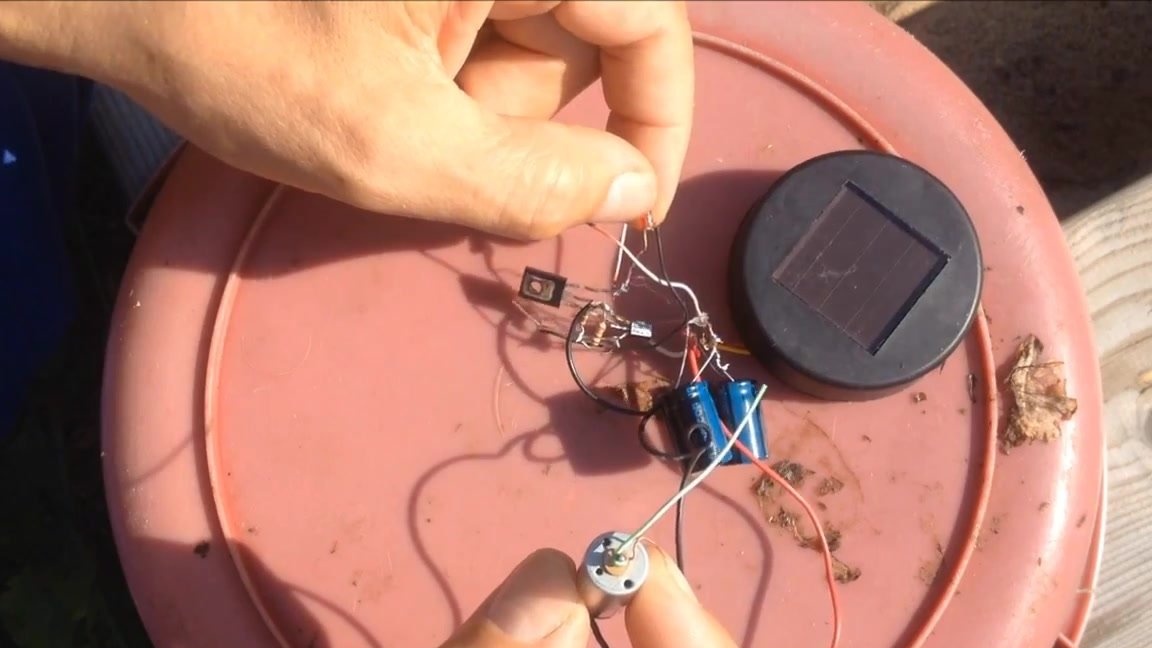
Dalam kes bateri solar, kami membuat dua lubang dengan pisau dan memasukkan kapasitor di dalamnya - ini akan menjadi mata serangga kita. Kami membetulkannya dengan pelekat mencairkan panas.
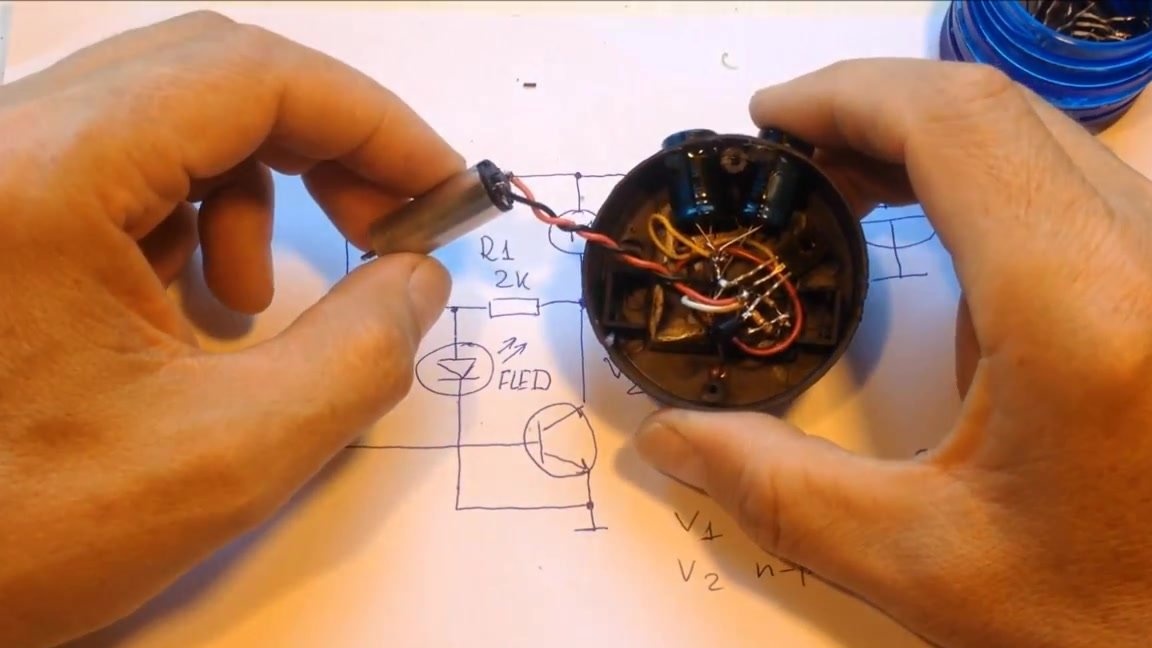
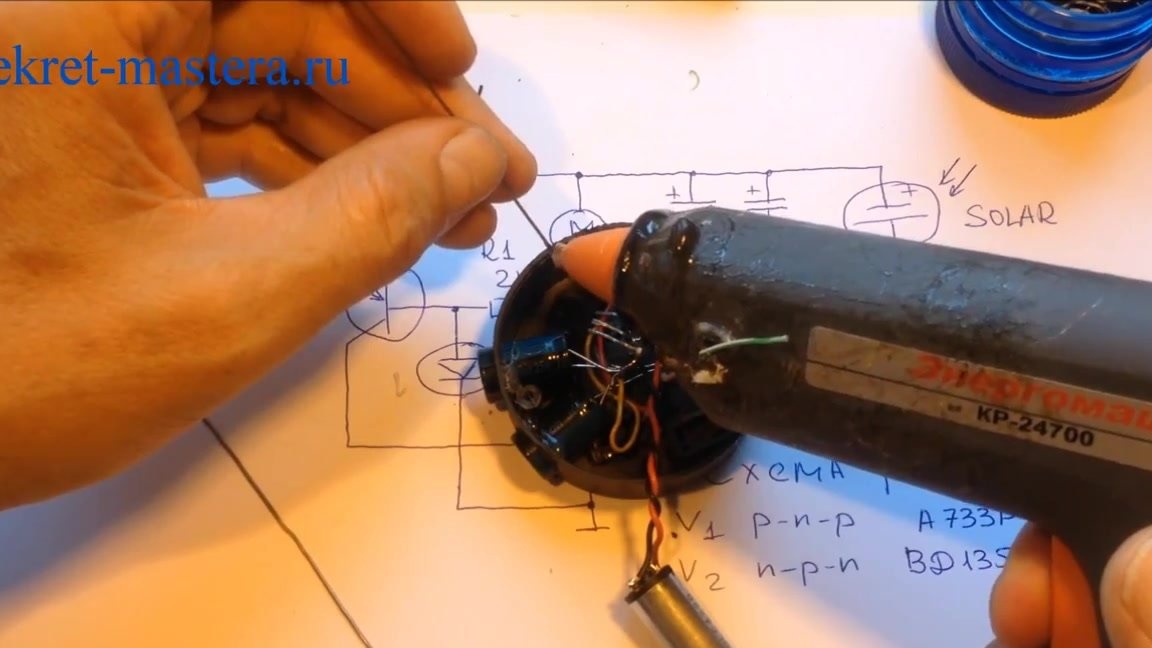
Kemudian, menggunakan besi dan wayar penyolder, kami mengumpul semua elemen radio mengikut skema.
Semua elemen tetap di dalam kes bateri solar, pada dawai memanjang kita hanya meninggalkan enjin dan tidak membaikinya.
Satu setitik gam yang besar digunakan pada hujung paksi mesin, anda juga boleh beberapa kali membentuk bola kecil di hujungnya.
Kami akan membuat kaki serangga kami dari klip kertas biasa.Meluruskan klip kertas, hanya meninggalkan tip kecil yang tidak disentuh, dan membetulkannya ke badan dengan pelekat panas-mencair. Secara keseluruhan kita akan mempunyai tiga kaki.
Kami melampirkan motor kami ke salah satu kaki, jadi robot itu bersandar pada bola yang terbentuk pada penghujungnya.
Secara pilihan, anda boleh memberikan kaki yang diperlukan bentuk, sedikit membengkok atau meluruskan.
