

Penulis berdasarkan projek ini pada versi yang lebih mudah. buatan sendiri bot, dan menyempurnakannya. Sensor diletakkan di dalam bot untuk mengelakkan rintangan dan bergerak ke dalam cahaya. Bagaimana pengawal dalam bot digunakan Arduino, sensor ultrasonik dipasang di hadapan, dan sensor cahaya terletak pada sisi. Bot sederhana ini tidak merosakkan dinding, dan dikawal oleh lampu suluh.
Bahan dan alat:
- Penebat pita / pita pelekat
- Thermoglue dengan gam panas
- Motor DC 2 pcs
- Botol plastik 2 buah
- wayar
- Kipas kecil 2 pcs
- Arduino, komputer dan kabel USB
- Kotak plastik
- Bateri dan penyambung 9V
- Kuasa kuasa (jenis 1N4004)
- Resistor
- Transistor MOSFET atau TIP 120
- Dua fotokel dan dua butang
- gunting
- Solder dengan besi pematerian

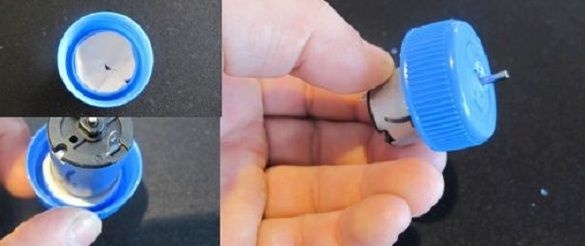
Langkah 1. Memasang enjin.
Penutup dikeluarkan dari botol dan lubang dibuat di dalamnya. Di dalam penutup, penulis memerah gam panas tanpa menutup lubang. Dia meletakkan aci motor di dalam lubang dan meletakkannya di atas gam. Selepas gam kering, aci berputar dengan bebas. Prosedur yang sama berlaku dengan penutup kedua.
Langkah 2. Melampirkan botol.
Botol diikat bersama oleh prinsip rakit dengan bantuan tiga jalur pita pelekat.

Langkah 3. Pematerian ke enjin.
Oleh kerana enjin yang dipasang di dalam palam tidak mempunyai wayar, ia perlu untuk menyolder mereka, panjang wayarnya adalah kira-kira 25-30 cm.

Langkah 4. Pemotongan botol.
Agar wayar jatuh ke dalam badan kapal, slot kecil dibuat dari bahagian atasnya.

Langkah 5. Mengamankan motor.
Tambahan pula, penulis mengalihkan penutup pada botol, kerana mereka tidak memutar dengan baik, saya terpaksa menggunakan gam panas. Wayar ditarik melalui lubang yang disediakan di dalam botol.

Langkah 6. Kes.
Kotak plastik melekat pada dua botol. Dalam kapasitansi ini untuk elektronik, anda boleh membuat lubang untuk wayar, atau memegang wayar melalui bahagian belakang kotak. Lubang-lubang untuk wayar-wayar di atas botol terlindung dengan pelekat mencairkan panas.

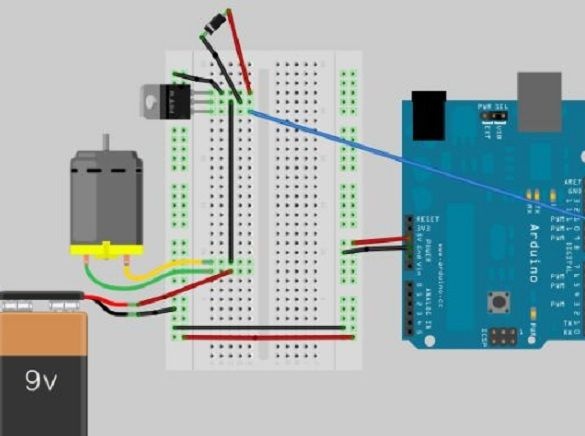
Langkah 7. Rangka pendawaian.
Litar ini menggunakan transistor TIP 120 sebagai suis (anda boleh menggunakan transistor MOSFET atau Darlington yang serupa). Ia digunakan untuk menukar beban semasa memakan sejumlah besar arus, kerana Arduino tidak mempunyai kuasa yang cukup untuk motor. Litar ini dipasang untuk pertama dan kemudian untuk enjin kedua (bateri lain tidak diperlukan untuk enjin kedua).
Langkah 8. Sensor.
Sensor ultrasonik hebat untuk bahagian depan bot, memberi amaran kepada halangan dalam perjalanan. Fotokel bertindak seperti antena dan digunakan untuk membuat bot itu terapung ke dalam cahaya.Butang di tepi digunakan sebagai sensor halangan. Anda juga boleh mengubah kod dan menggunakan sensor lain, seperti inframerah.

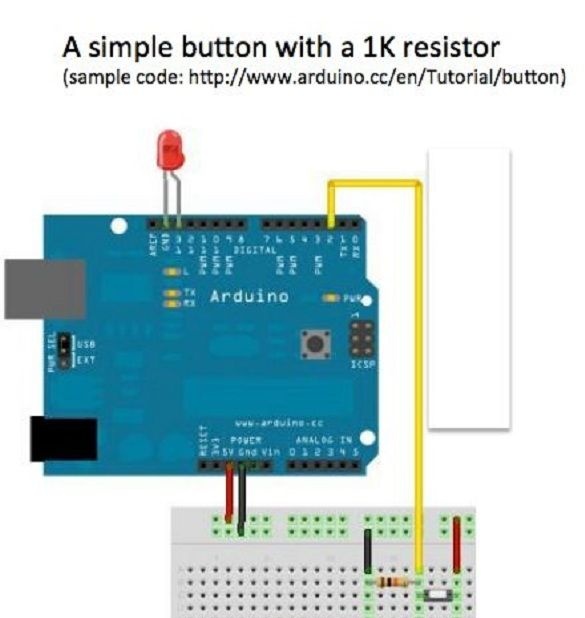
Langkah 9. Skim untuk sensor.
Rajah menunjukkan sambungan butang mudah dan perintang 1K. Skema untuk kedua-dua butang diulang, butang diletakkan pada kedua-dua belah bot. Mereka akan bertanggungjawab untuk mengubah pergerakan bot dalam perlanggaran.
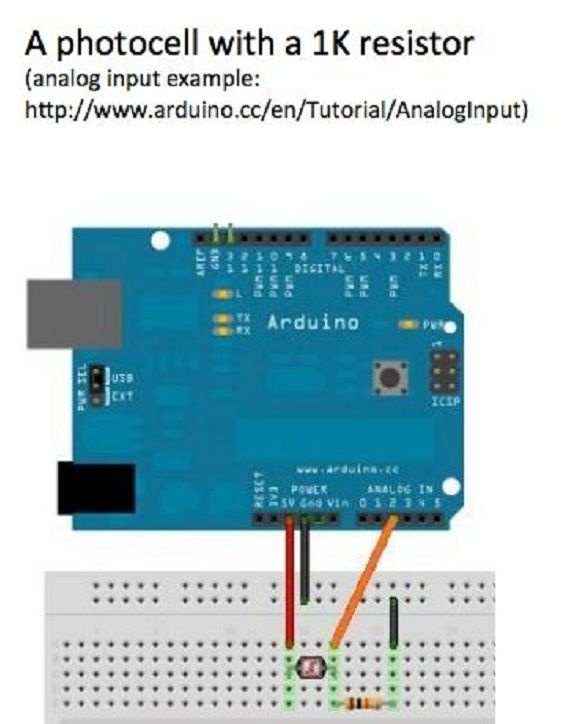
Rajah berikut menunjukkan litar dengan perintang 1K dan photocell. Penulis melakukannya 2 kali dan meletakkan fotokel di sisi yang bertentangan dengan bot.
Langkah 10. Kod program.
Penulis memberi peluang untuk memuat turun kodnya untuk digunakan, dengan itu menyediakan fungsi asas bagi mereka yang akan memasang bot tersebut. Kod ini termasuk sokongan untuk photocells, rangefinder dan butang. Bot itu akan cuba mengelakkan rintangan di hadapan dirinya sendiri, dan bertukar arah yang bertentangan apabila ia menghadapi halangan dari sisi. Jika tidak ada keinginan untuk menggunakan seluruh set sensor, tetapi hanya sebahagian daripada mereka mempunyai kod untuk setiap satu secara berasingan. Anda boleh memuat turun semua kod di bawah artikel.
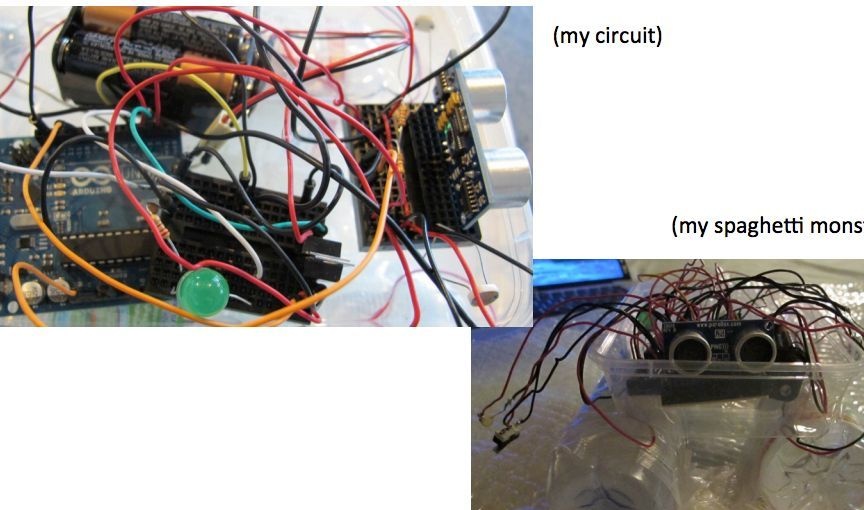
Langkah 11. Memasang bot.
Litar yang dipasangkan, Arduino dan bateri dipasang.
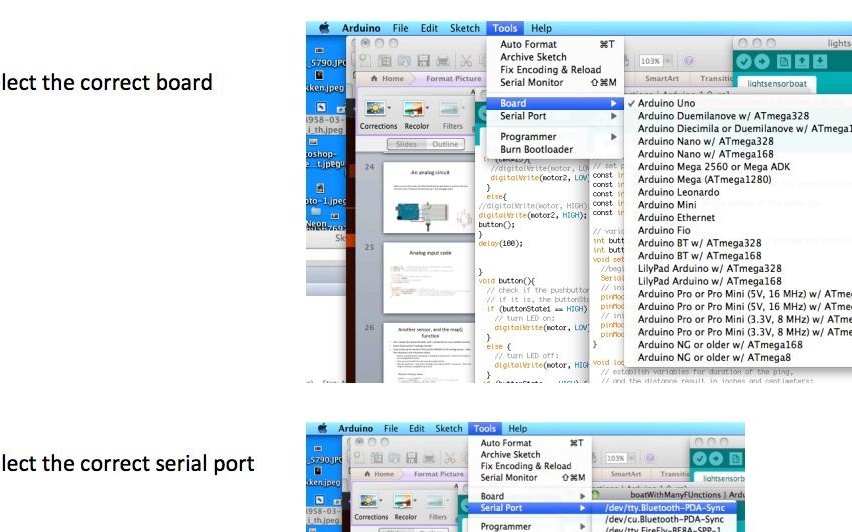
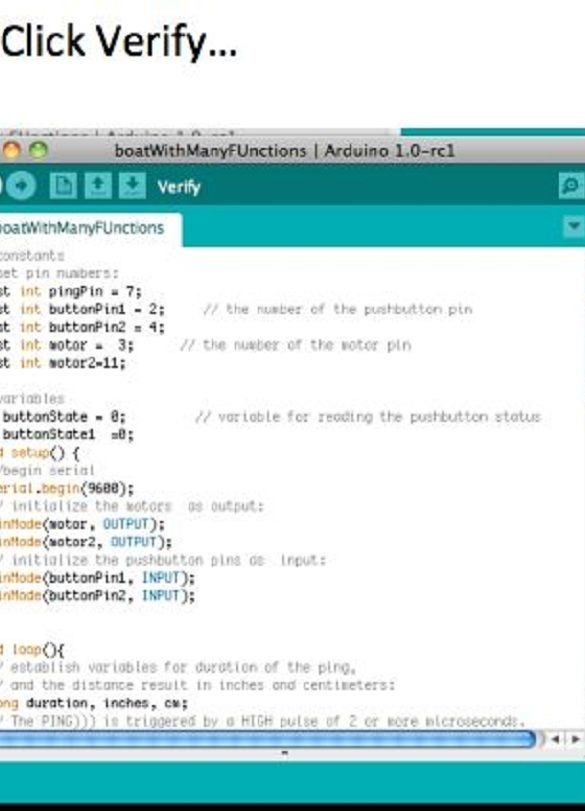
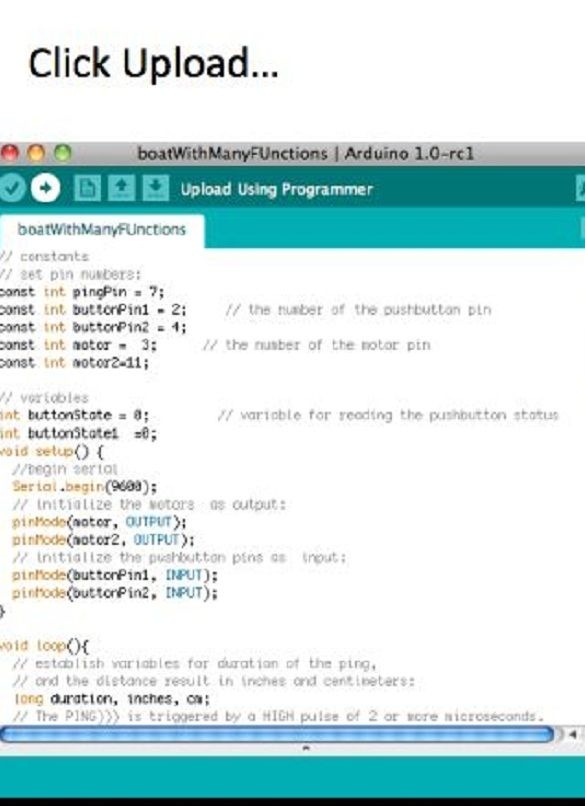
Langkah 12. Muat turun lakaran.
Seterusnya, IDE Arduino dibuka, memilih fail dan port yang betul, selepas itu penulis menyusun dan memuat naik kod kepada pengawal.
Langkah 13. Tahan air dan ujian.
Penulis juga mengasingkan semua tempat yang berpotensi kemasukan air dengan gam panas. Juga terlindung semua wayar dari litar pintas. Bekas dengan Arduino ditutup dengan kotak yang sama dan dimeterai dengan pita elektrik. Kipas dipasang pada motor. Di sini bot sudah siap, kini anda boleh mula menguji di atas air.



Video dengan ujian awal bot: