

Pencinta hari baik arduino! Seperti yang digantung di Internet, saya melihat artikel yang agak menghiburkan mengenai cara membuat manipulator tangan yang mengulangi pergerakan tangan seseorang, yang diilhamkan oleh kesederhanaan dan kesan buatan sendiri buatan sendiri memutuskan untuk mengumpulnya. Saya dapati sensor lekuk di Alliekspress untuk tangan pemancar dan mendapat sedikit mati, satu perkara yang berdiri di rantau ini $ 15-20, ternyata bahawa 5 daripada sensor ini hanya satu tangan akan dikenakan biaya $ 75-100 dan ini hanya untuk sensor! Selepas beberapa lama, saya belajar bagaimana membuat sensor tersebut lakukan sendiriIa ternyata sangat mudah dan murah.
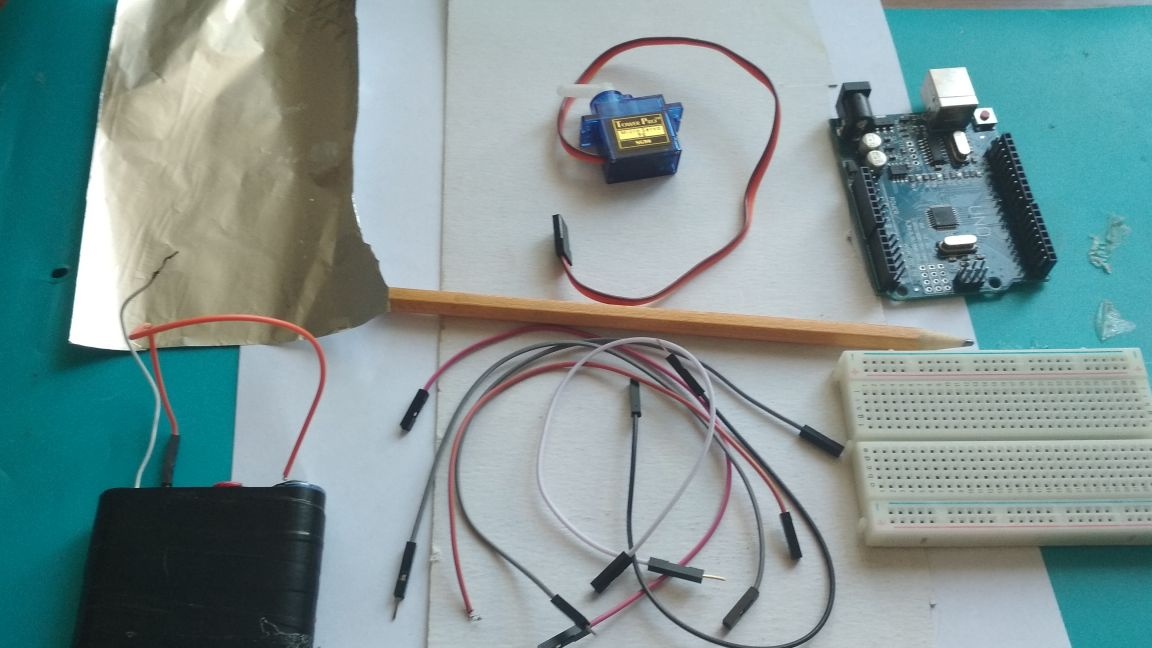
Dan sebagainya untuk sensor tengkuk yang kita perlukan:
bayaran Arduino Uno ()
-breadboard
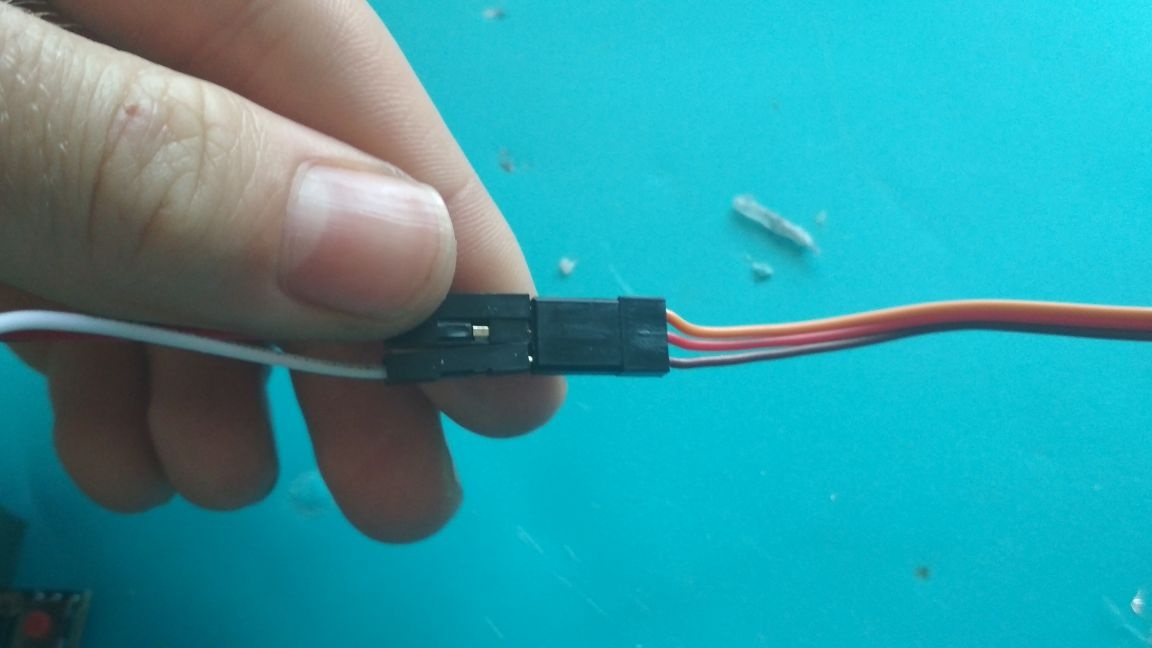
- menyambung wayar seperti "ayah ibu" atau "ayah bapa"
-servomotor
kadbod
kertas
kerajang
pensil
- bekalan kuasa dari 6 hingga 12 volt (saya menggunakan 4 bateri yang disambung secara siri pada 1.5 V)
Dari alat yang kami perlukan:
senapang gam
gunting
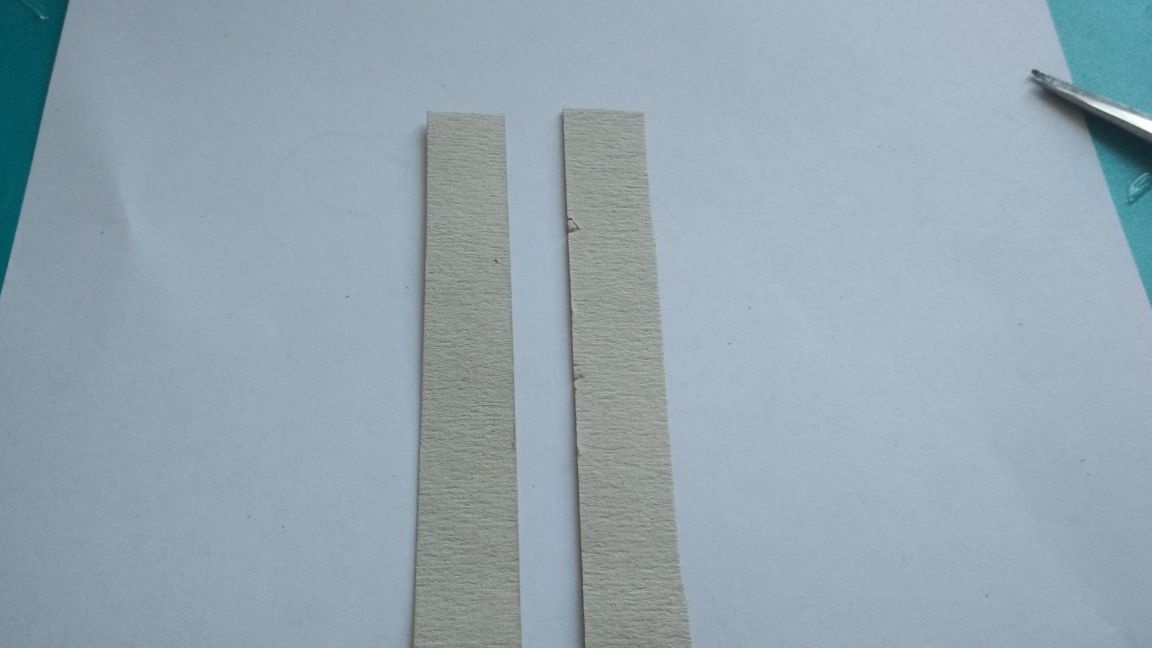
Jadi, perkara pertama yang kami potong dari kadbod adalah dua jalur 2 cm lebih panjang daripada jari telunjuk anda dan kira-kira 1 cm lebar:

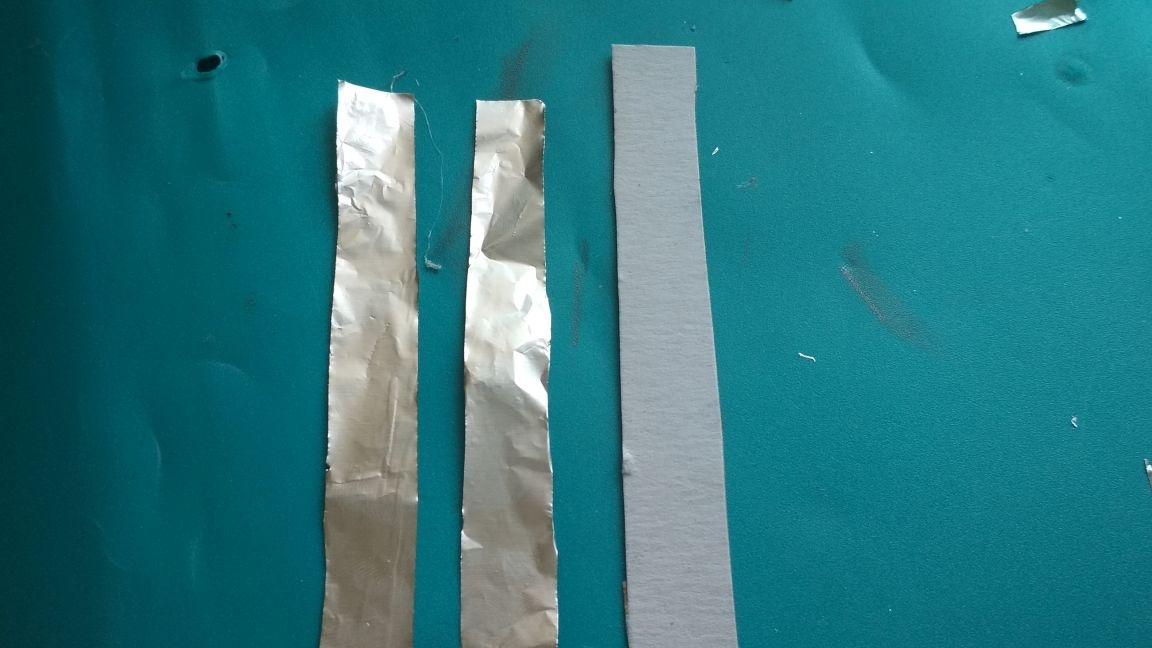
Potong salah satu jalur kertas yang sama dengan sedikit kurang:

Pensil naungan kedua-dua belah jalur kertas sebaik mungkin:


Potong dua jalur kerajang lebih kecil daripada kertas:
Melekatkannya ke jalur kadbod seperti yang ditunjukkan dalam foto:

Dari kabel penghubung "bapa-ibu" kami memotong keluar "ibu" dan kami membersihkan hujung dari penebat:
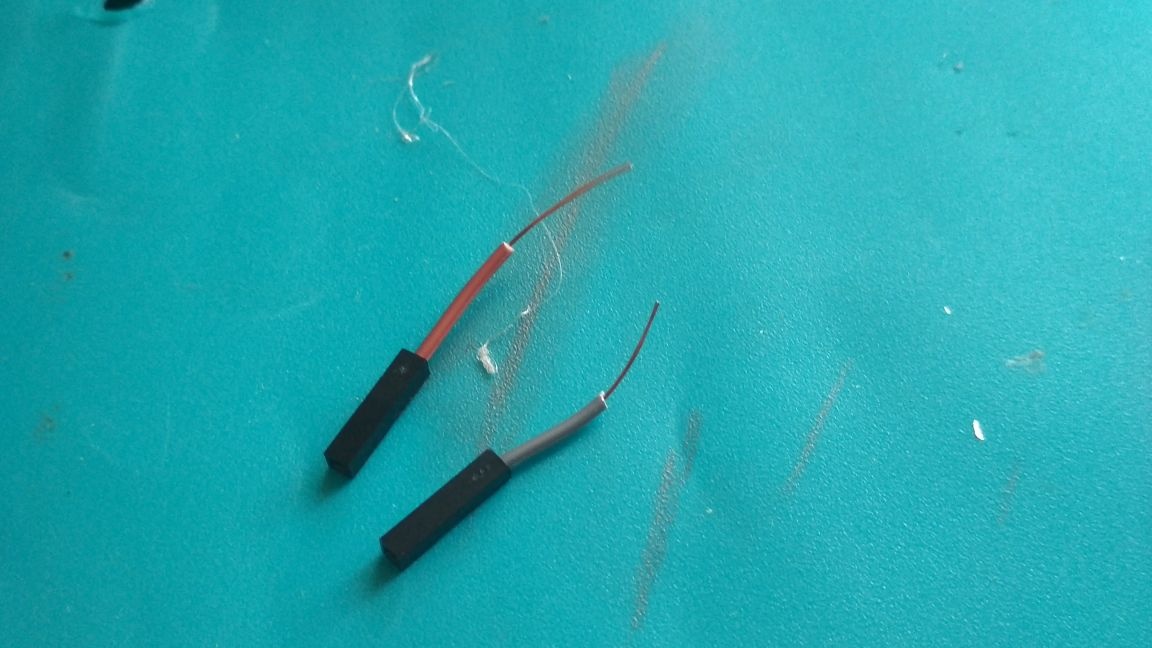
Kami melampirkan pita atau solder:

Kami melampirkan jalur kertas ke salah satu bahagian, supaya ia bersentuhan dengan kerajang, kemudian tutup dengan separuh kedua sisi dengan kerajang, tekan dan gam pada sisi:

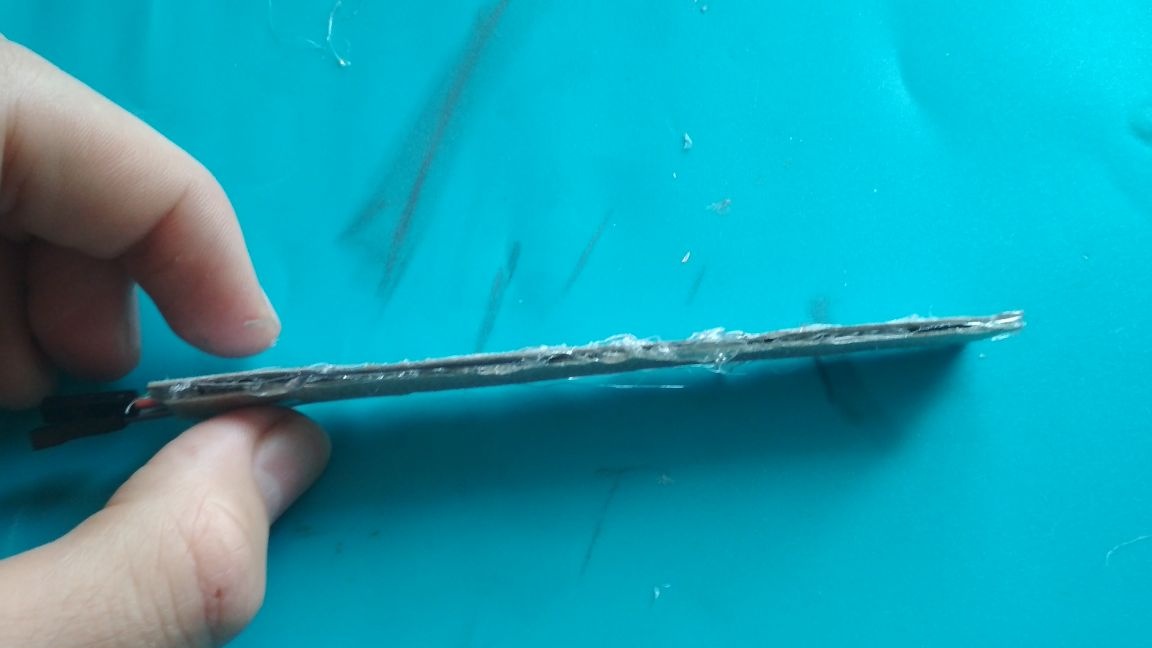

Kami membuat "ular" sedemikian di setiap sisi dengan bantuan gam panas, mereka diperlukan supaya reka bentuk lebih fleksibel

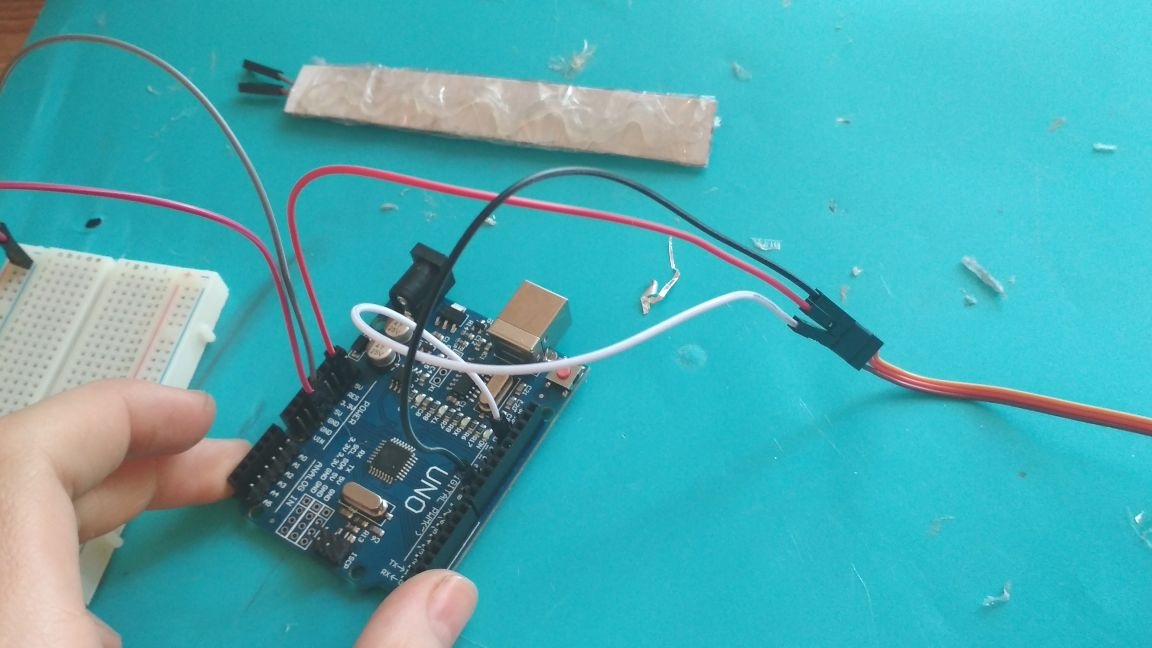
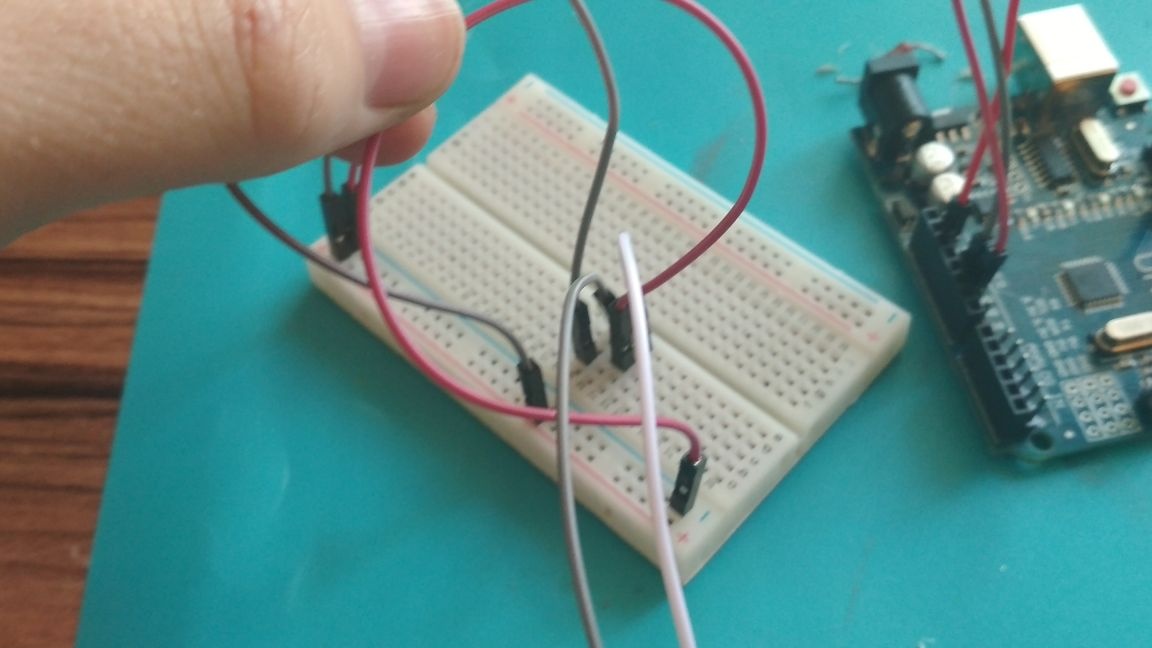
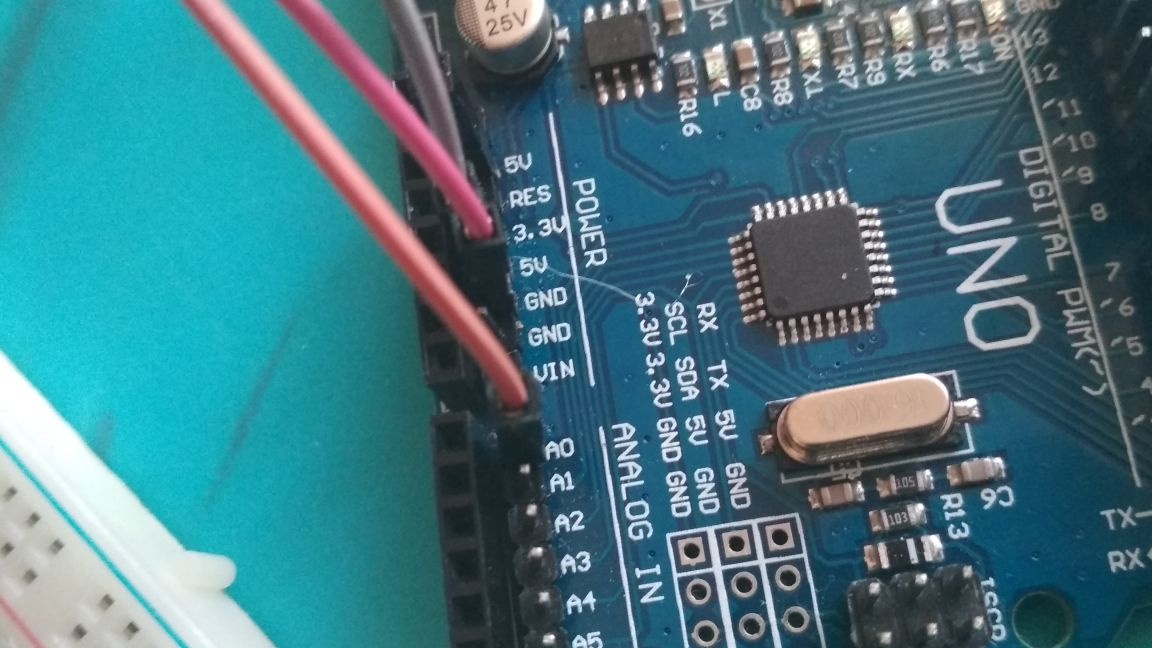
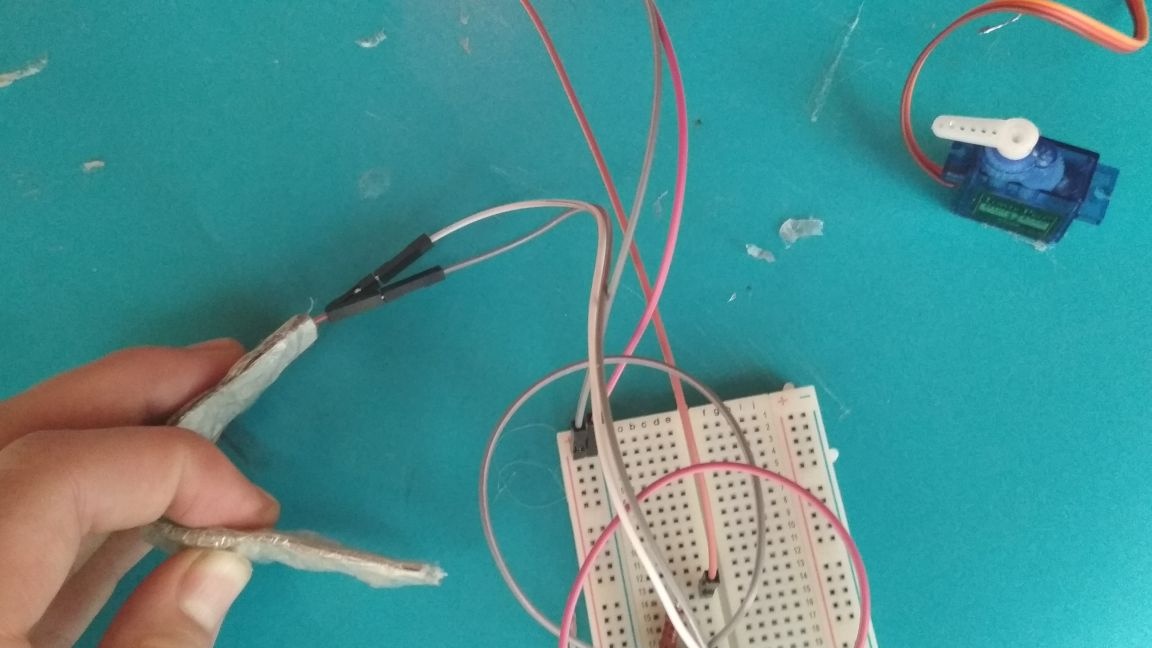
Kami mengambil arduino dan menyambung output 5v ke tambah papan roti, dan Gnd ke tolak:

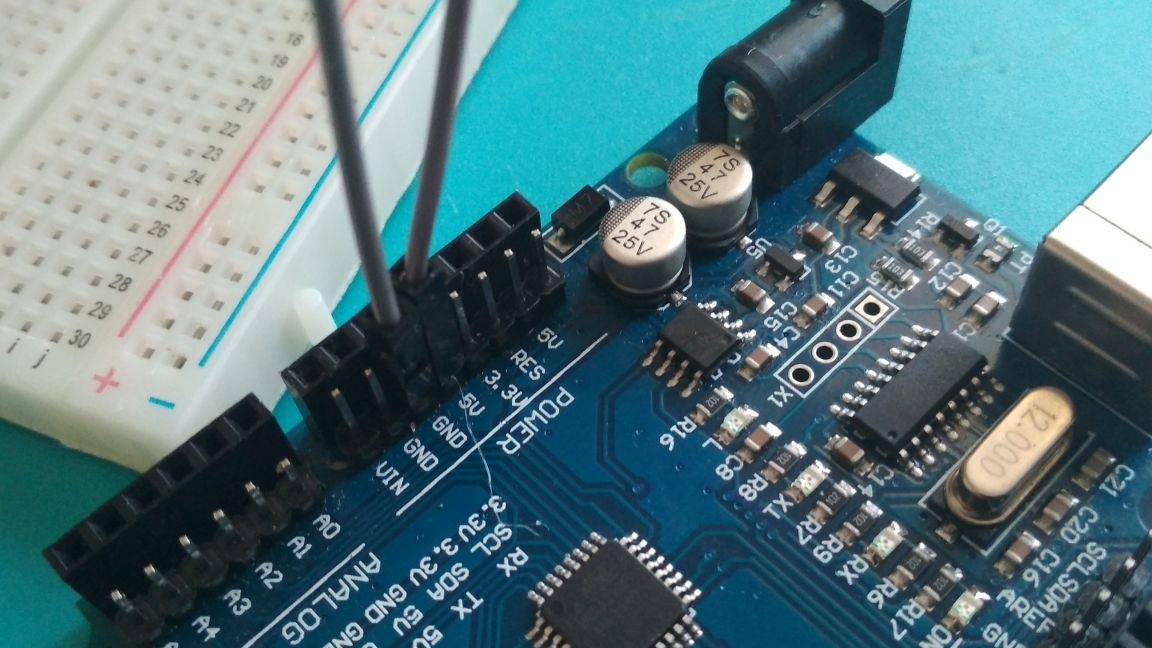
Tambahkan wayar penyambung ke servomotor dan sambungkannya ke arduino seperti berikut:
Kawat coklat ke gnd
merah ke 5v
oren kepada 9 pin
Untuk sensor lengkung kami, tambahkan dua wayar dad-to-dad

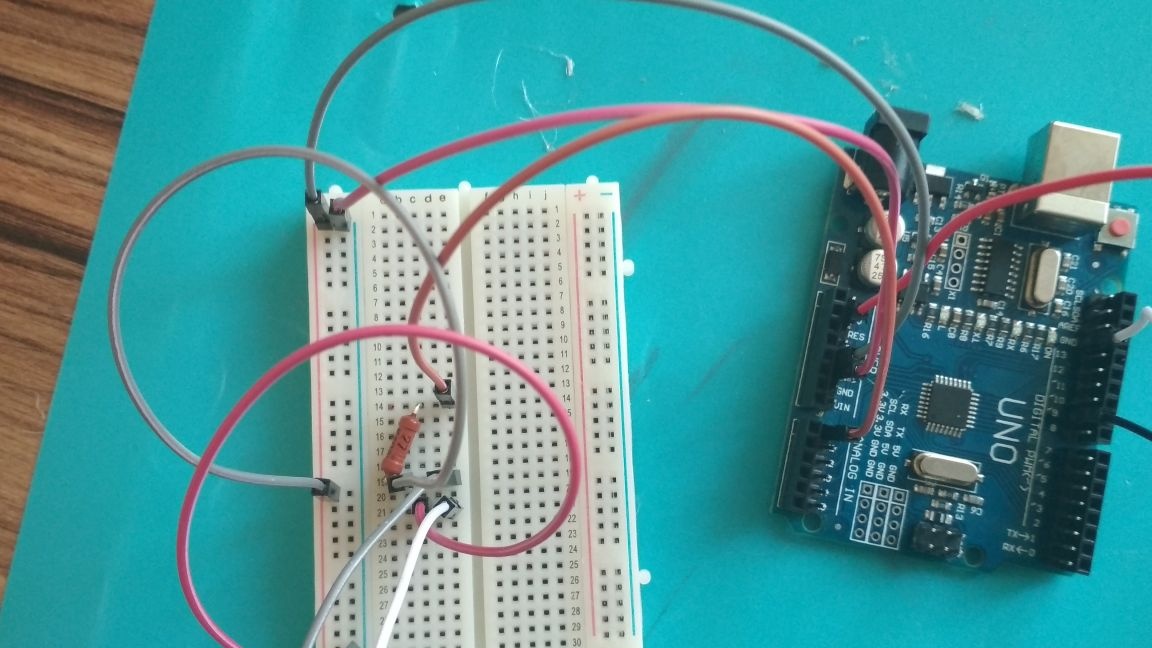
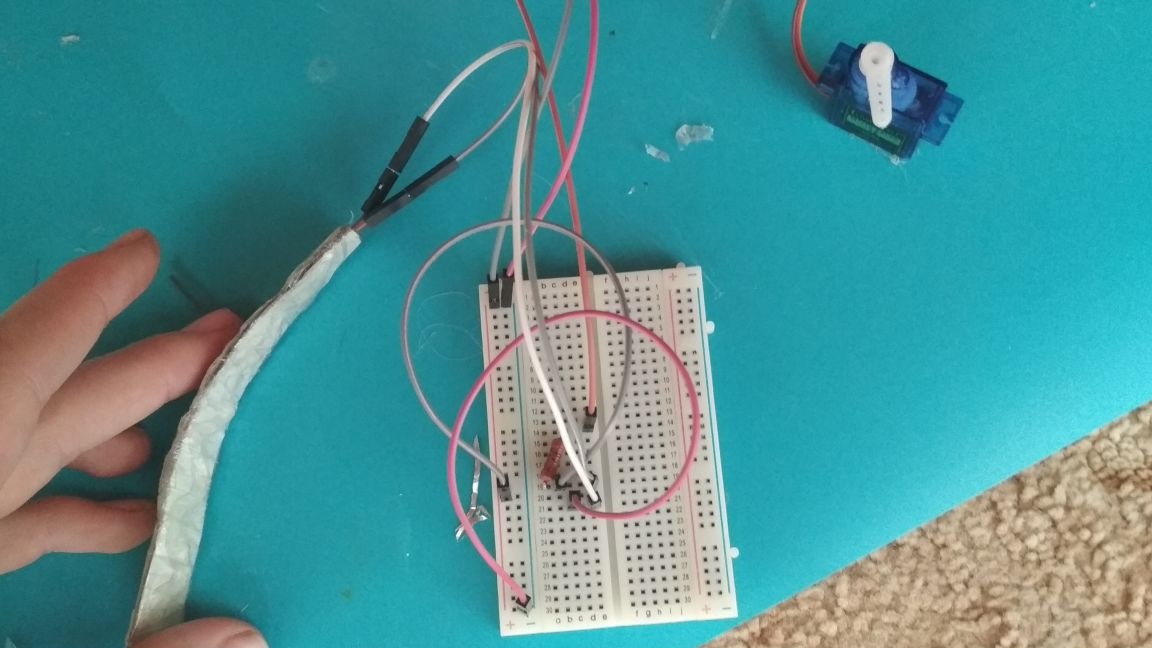
Sambungkan mereka ke papan roti:
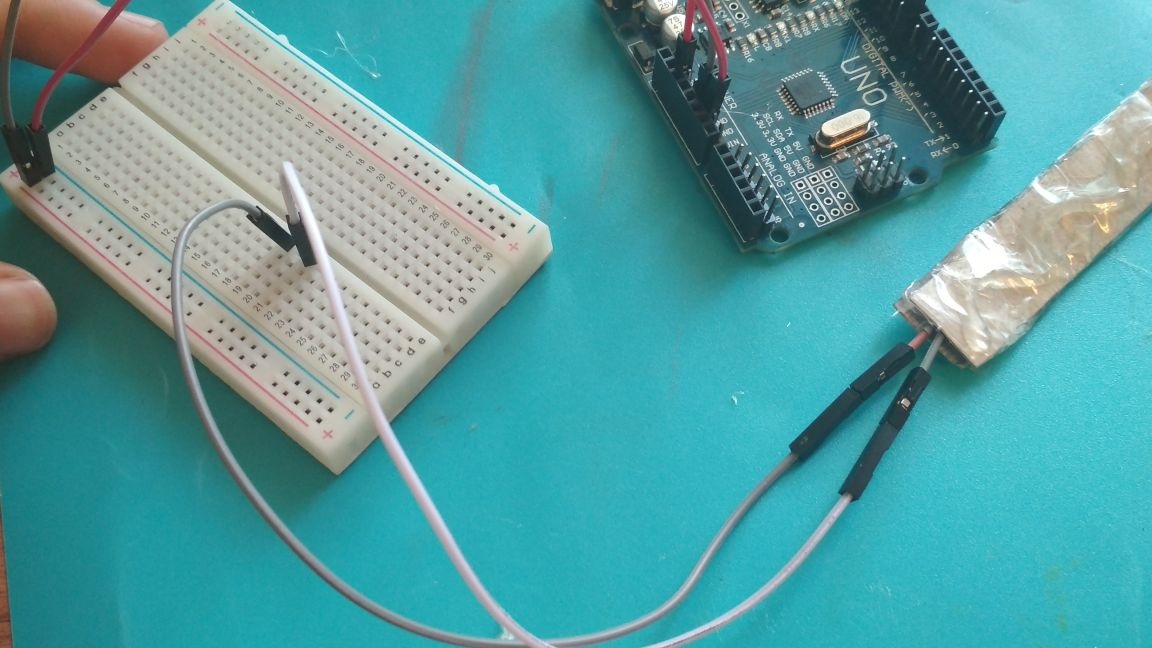
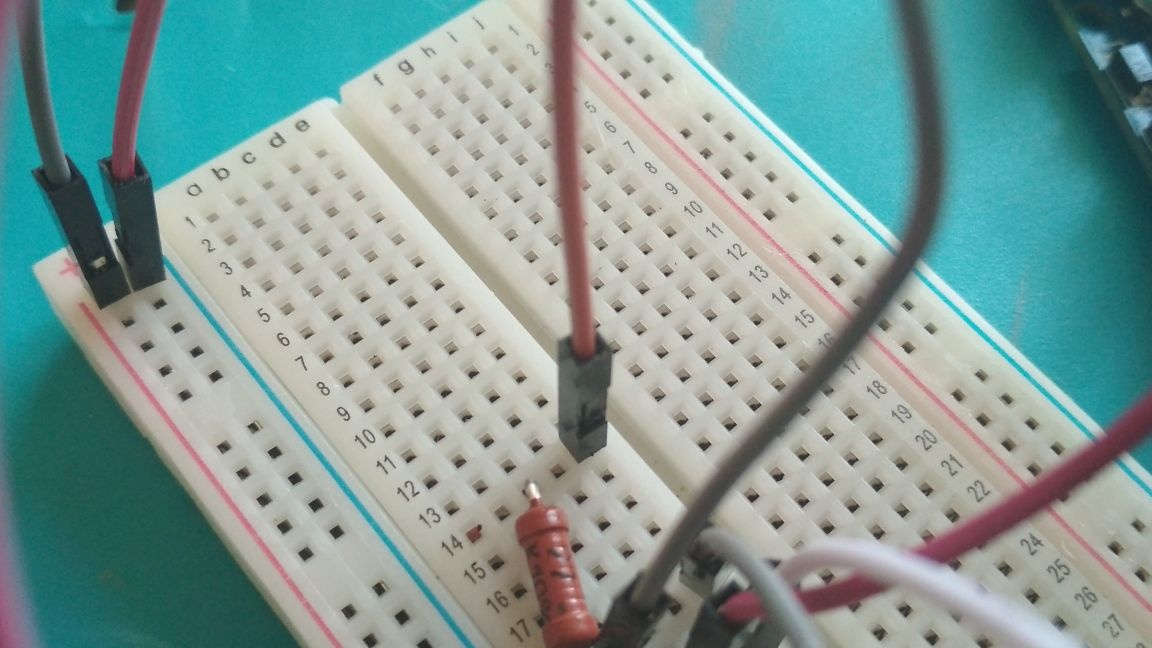
Salah satu hujung sensor disambungkan ke tambah papan suapan melalui perintang 22 kilo-ohm (malangnya saya bercampur-campur dan menyambungkannya ke output lain, tetapi ini tidak bertindak balas terhadap kebolehkerjaan), dan yang lain kepada tolak:
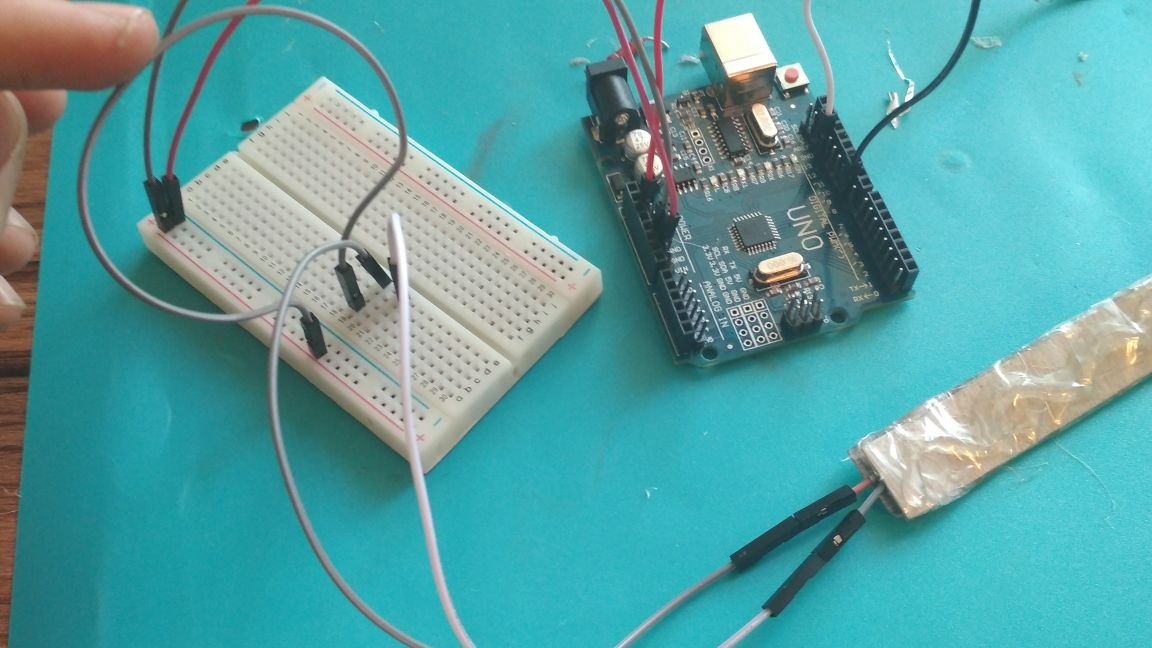
Pada garis breadboarda di mana penghujung sensor disambungkan ke tambah terletak, tambah wayar lain dan keluaran ke output A0 pada Arduino:
Sekarang kita menyambungkan Arduino ke komputer, mulailah Arduino IDE dan muatkan lakaran berikut ke dalamnya:
#include
Servo1 servo1;
const int flexpin = 0;
batal persediaan ()
{
Serial.begin (9600);
servo1.attach (9);
}
kekosongan gelung ()
{
int flexposition;
int servoposition;
flexposition = analogRead (flexpin);
servoposition = peta (flexposition, 1018, 1023, 0, 90);
servoposition = constrain (servoposition, 0, 90);
servo1.write (servoposition);
Serial.print ("sensor:");
Serial.print (flexposition);
Serial.print ("servo:");
Serial.println (servoposition);
kelewatan (1000);
}Hidupkan monitor port yang Arduino disambungkan dan muatkan lakaran

Sekarang kita melihat perubahan yang terjadi di monitor pelabuhan apabila sensor kami membongkok, kita melihat bahawa 1023 adalah 90 darjah, dan 1020 dan 1019 adalah 0, jadi dalam kes saya, saya menukar nombor 1018 dalam lakaran kepada 1020, anda boleh mempunyai yang berbeza. Sekarang 1020 adalah 0 darjah, dan 1023 adalah 90 darjah. Selepas semua perubahan, muat naik lakaran baru yang disesuaikan ke papan Arduino


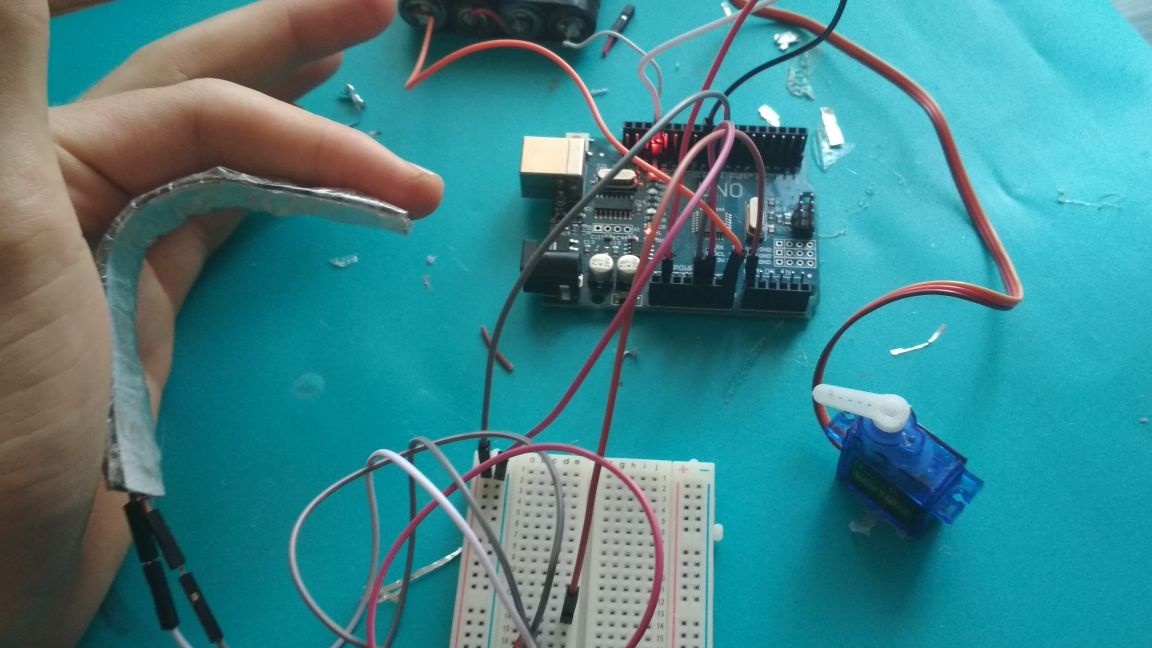
Nah, itu sahaja! Sensor lenturan kami yang paling mudah dan terpenting adalah sedia!
Sekiranya semuanya dilakukan dengan betul, apabila sensor dibengkokkan, pemacu servo akan membuat giliran 90 darjah, dan apabila dilanjutkan, ia akan kembali ke kedudukan asalnya. Sudah tentu, ketepatan sensor ini adalah lebih rendah daripada yang dibeli, tetapi ia sesuai untuk projek-projek yang tidak begitu keliru, dan selain itu, jika segala-galanya dilakukan dengan teliti dan teliti, ia akan berubah hampir seperti yang dibeli. Saya harap artikel ini berguna kepada seseorang.
Terima kasih semua untuk perhatian anda!