
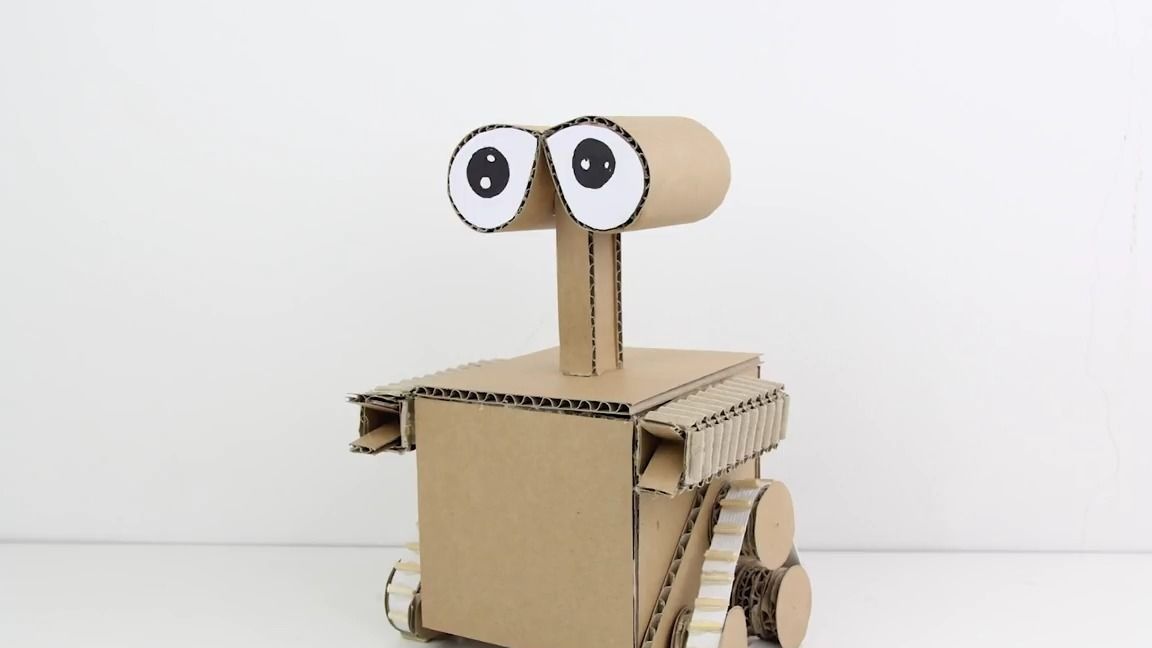
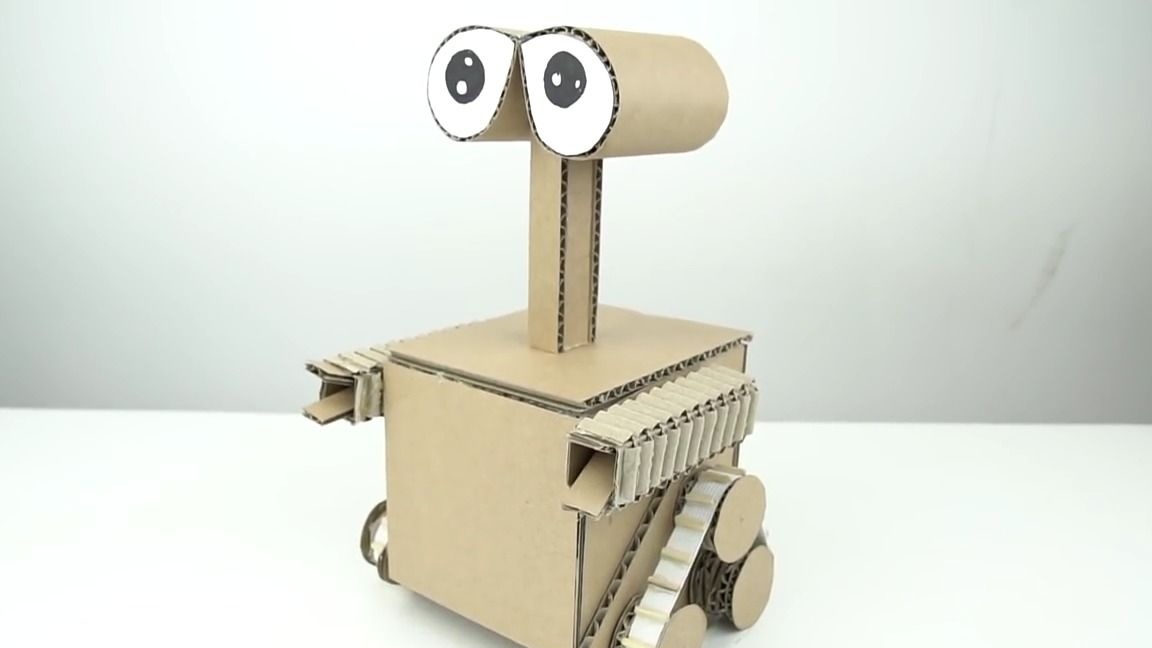
Selamat hari untuk semua! Dalam artikel hari ini, saya ingin menunjukkan kepada anda cara membuat kadbod terkawal radio daripada kadbod model itu Lembah robot yang terkenal! Saya fikir semua orang sudah biasa dengan robot comel ini yang ditinggalkan di tanah untuk membersihkannya, dengan memampatkan dan mengedarkan sampah di beberapa kawasan tertentu. Malangnya, model kami tidak dapat mengeluarkan sampah, tetapi sebaliknya, ia boleh bergerak dengan cara tangki.
Buatan sendiri sangat menarik dan mudah jadi mari bermula!
Dan sebagainya untuk robot Lembah yang anda perlukan:
kadbod beralun
kertas
- 2 motor gear Cina
- petak untuk dua bateri jari
- petak untuk 4 bateri jari
Kain getah 1.5 cm lebar
lidi barbeku
-menghubungkan dari penerima dan pemancar (anda boleh membeli di China untuk 300 Rubles)
wayar
suis
- logam nipis atau kayu kayu licin
Dari alatan yang anda juga perlukan:
gam haba
pisau pejabat
gunting
penanda
Dan jadi perkara pertama yang perlu dilakukan adalah menarik tiga lingkaran yang sama dengan diameter 3.5 cm pada satu keping kadbod dengan kompas:
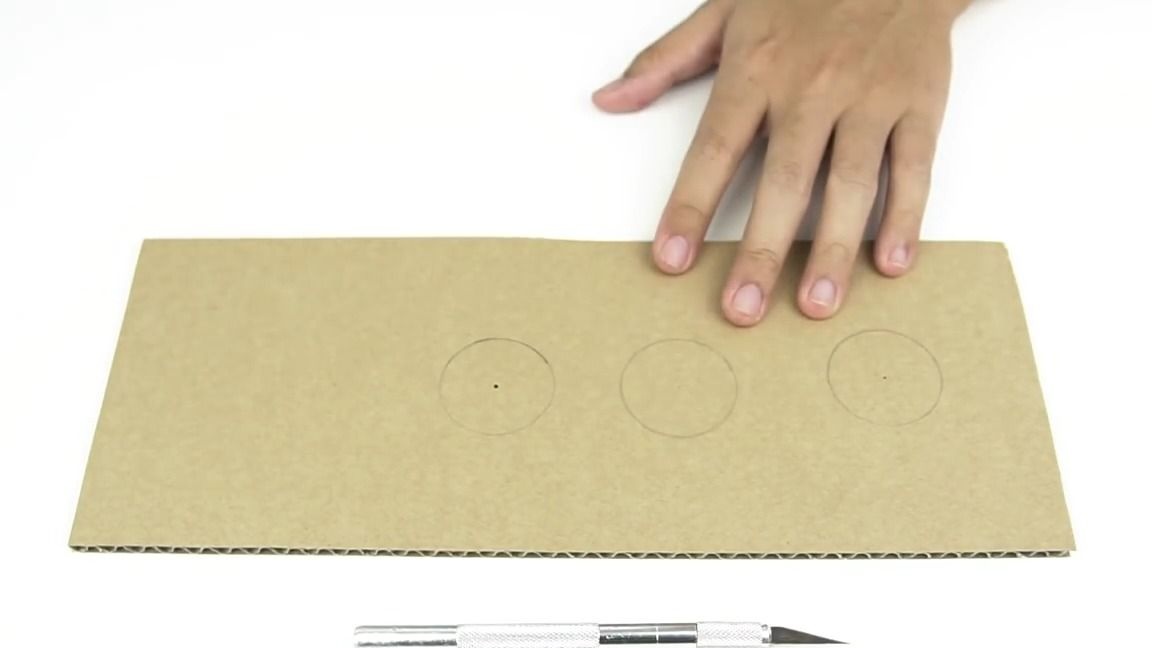
Kini anda perlu memotongnya:

Kemudian, menggunakan gam haba, gam semua tiga bulatan, menambah dua bulatan kadbod tipis dengan diameter sedikit lebih besar:

Menggunakan pemutar skru dan gerudi selama 1-2 mm, kami membuat lubang tepat di tengah:

Secara keseluruhannya, 6 ruang kosong tersebut hendaklah dibuat:

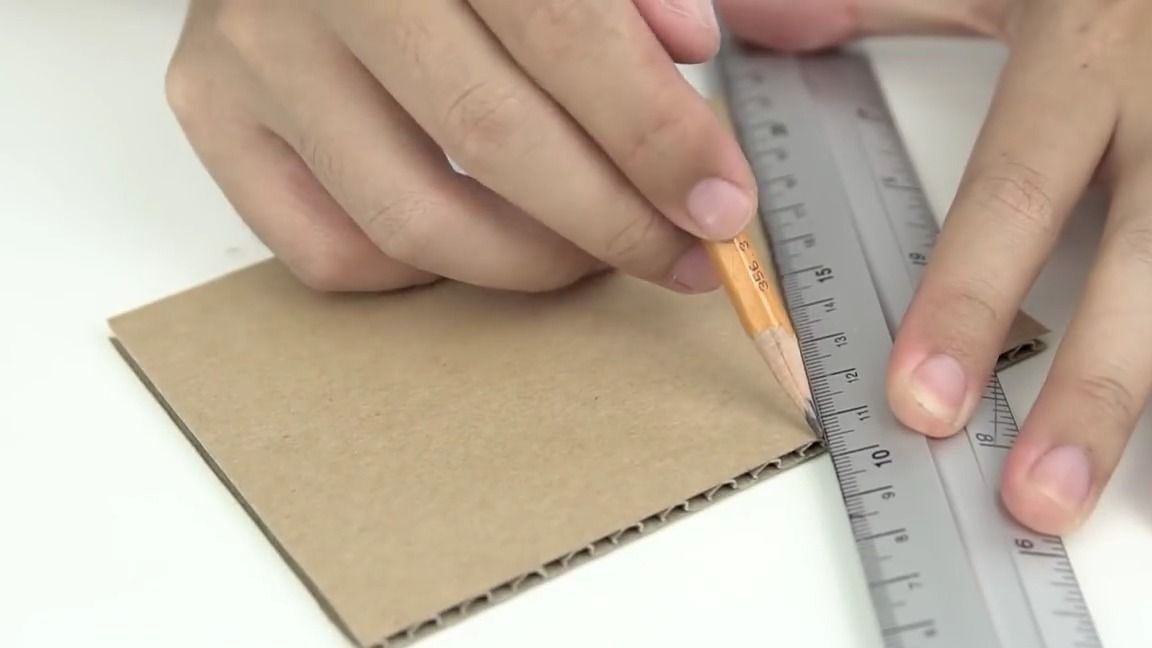
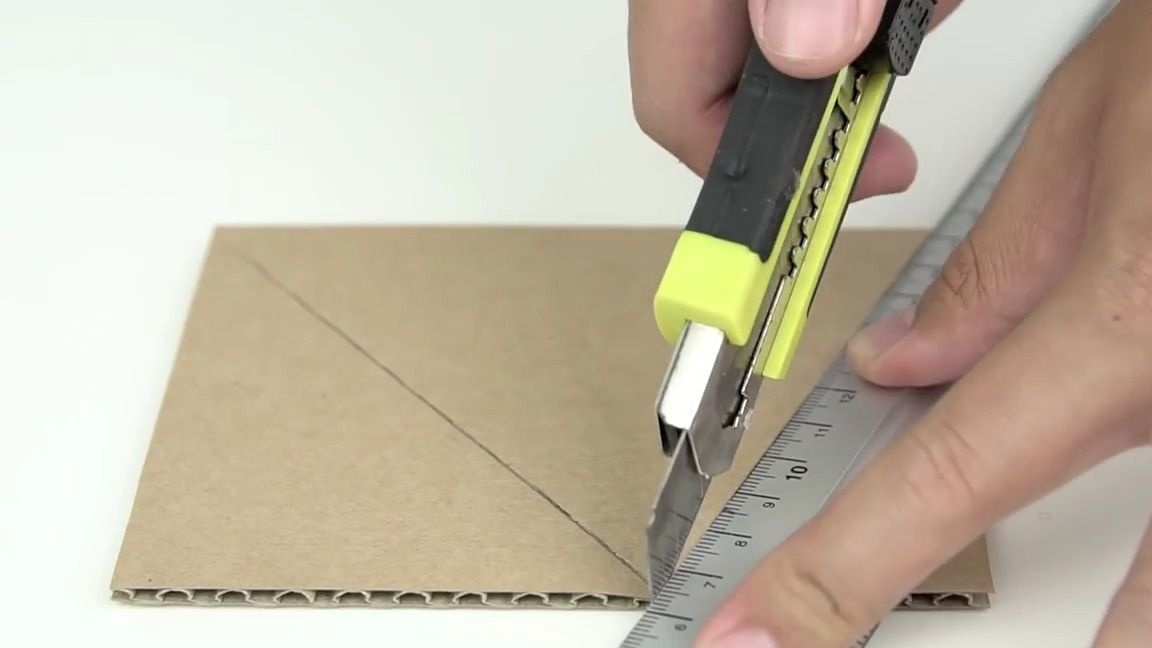
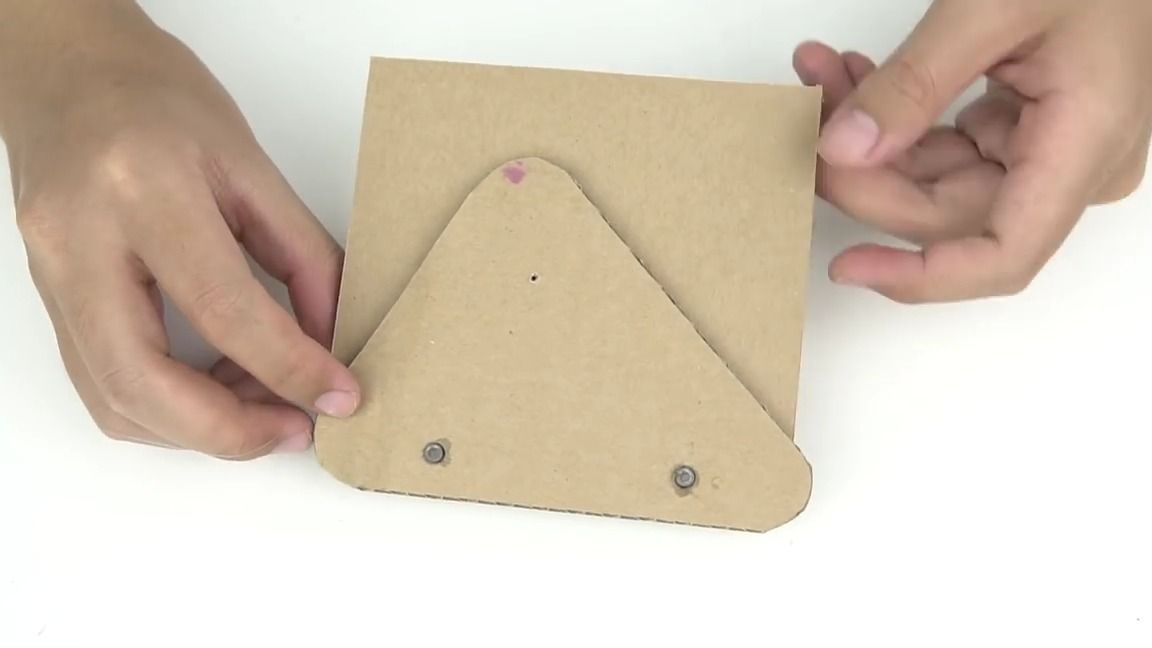
Kami memotong segi empat tepat dari kadbod bergelombang dan membuat segitiga seperti itu, kami melakukan semua seperti yang ditunjukkan dalam foto:
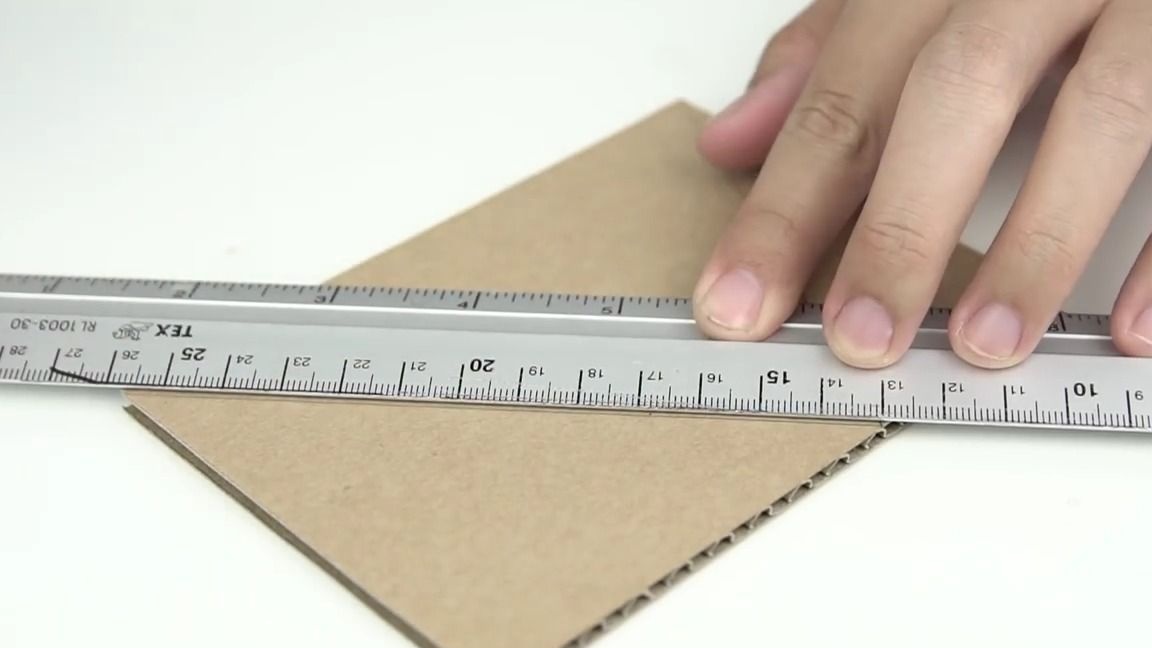
Ambil kompas dan bulatkan hujung bahan kerja kami:


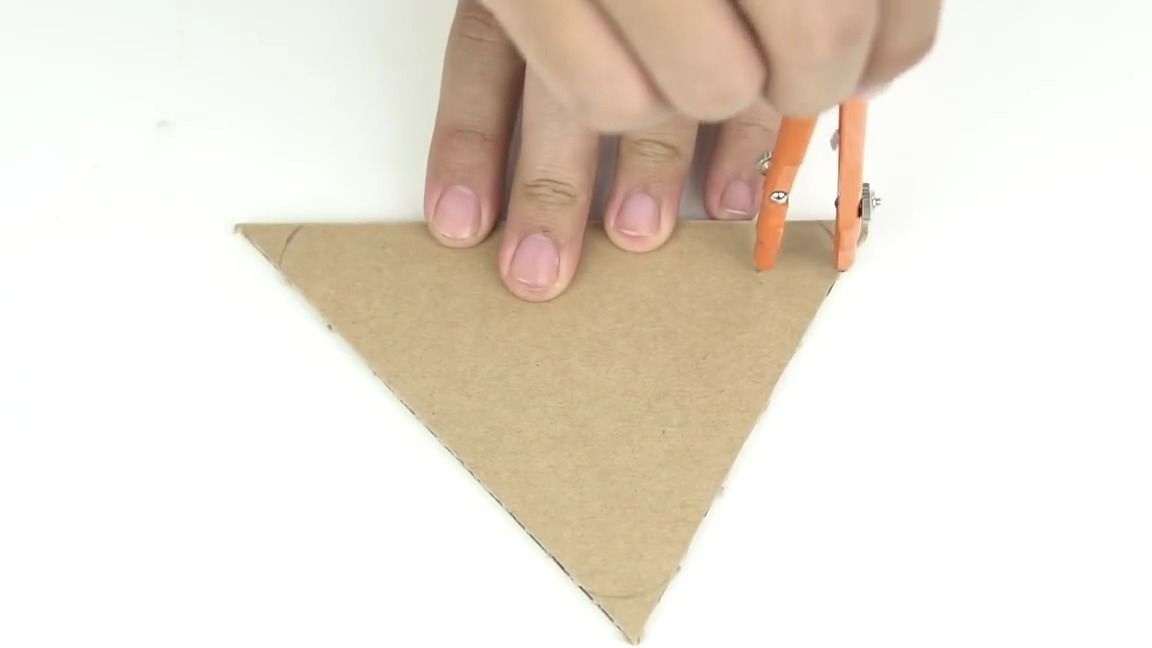

Secara keseluruhannya, anda perlu membuat 2 seperti berikut:

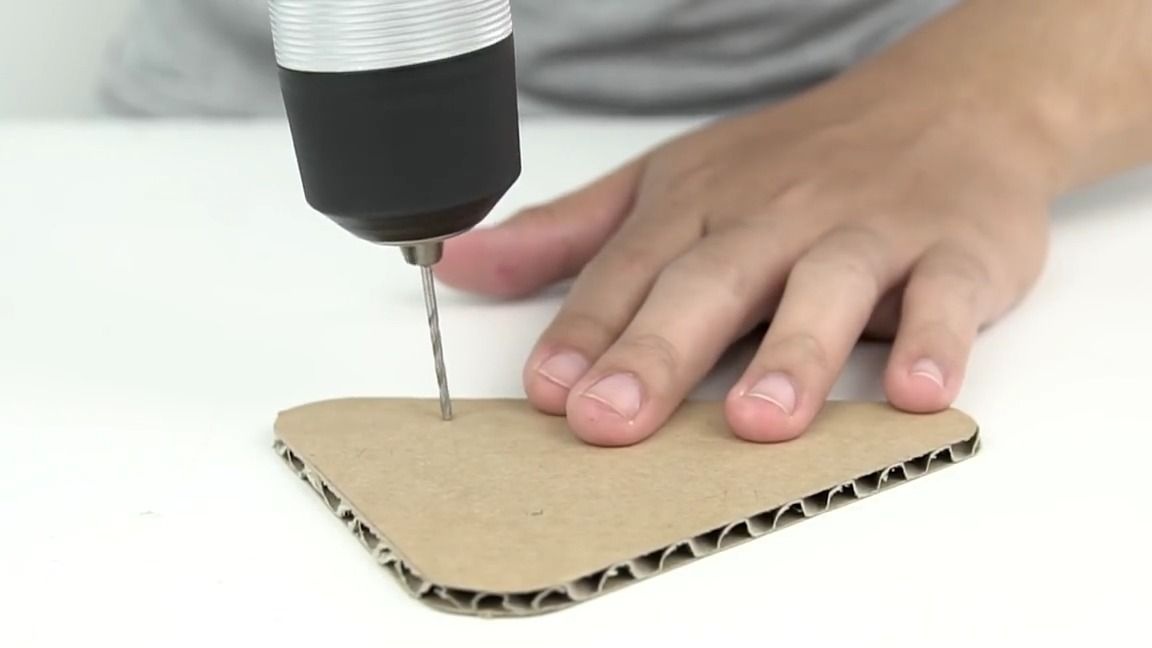
Kini, anda perlu mengambil pemutar skru dan dengan bor yang sama yang kami gunakan sebelum ini, anda perlu membuat 3 lubang pada setiap bahan kerja, selepas itu dua lubang yang lebih rendah perlu diperluaskan di sepanjang ketebalan tiub getah:



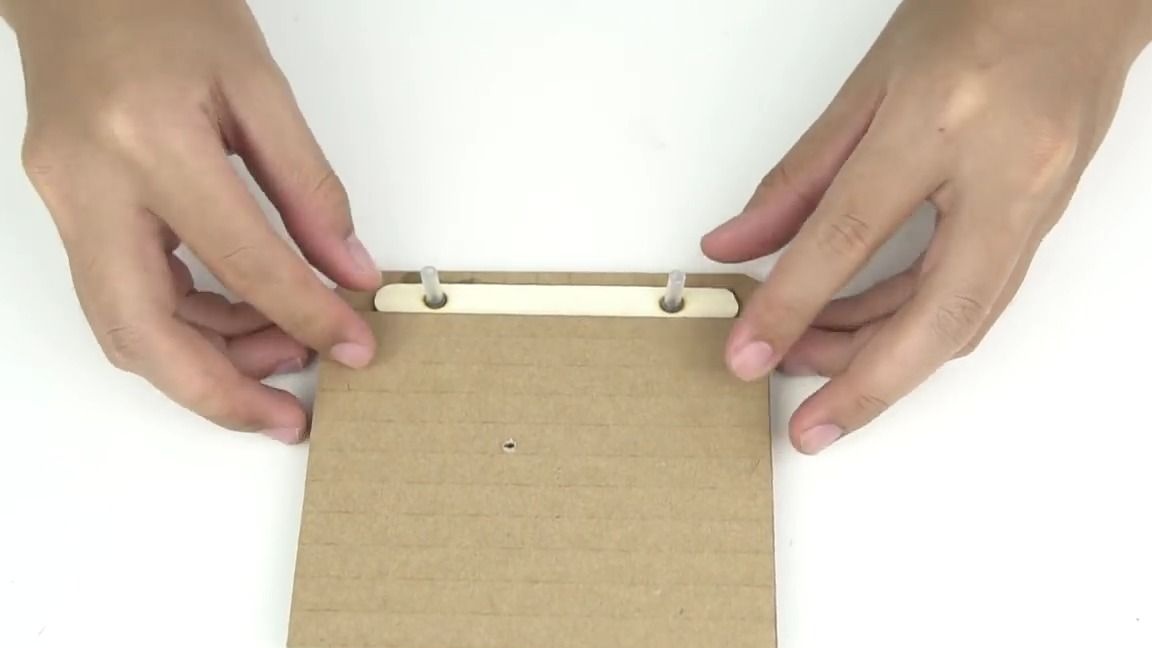
Ambil spatula kayu dan membuat dua melalui lubang dengan besi penyolder selari dengan dua lubang yang lebih rendah pada kadbod kosong, kemudian gam itu:
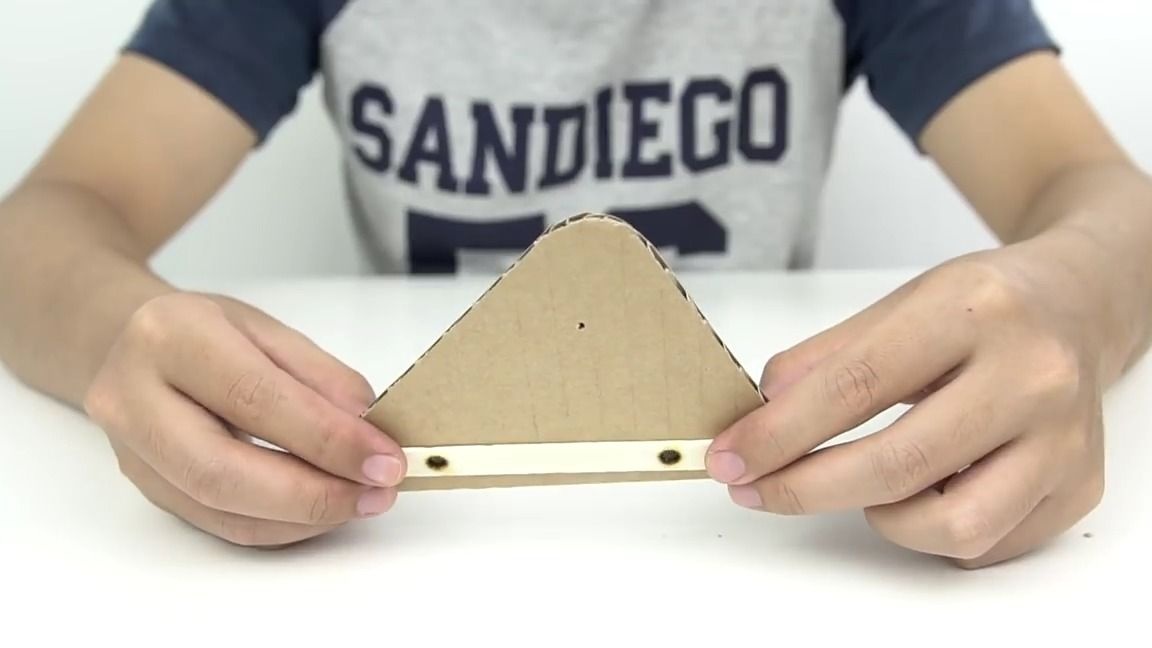
Ambil tiub kami dan masukkan mereka ke dalam lubang:



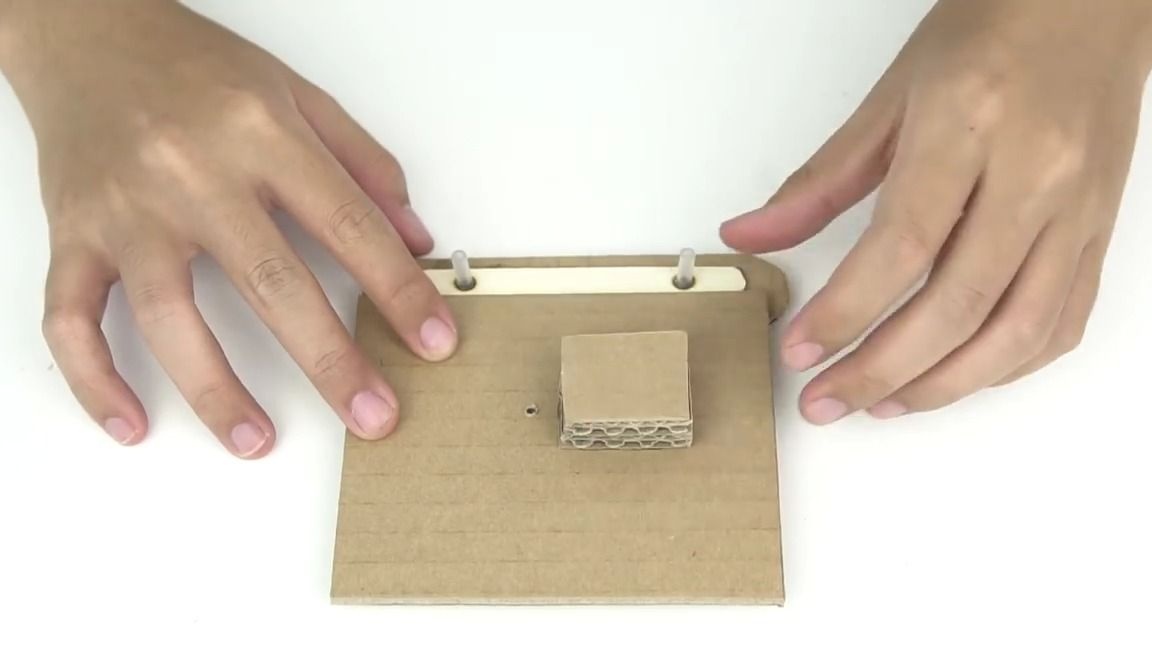
Kami menggunakan termo-gam untuk struktur kami dan gam persegi kadbod dengan lubang pra-dibuat selari dengan lubang nipis pada struktur kami:

Kami memotong dari kadbod yang sama dua kotak kecil dengan sisi 2-3 cm dan gam mereka di atas satu sama lain dan kemudian gam mereka ke seluruh struktur seperti yang ditunjukkan dalam gambar:
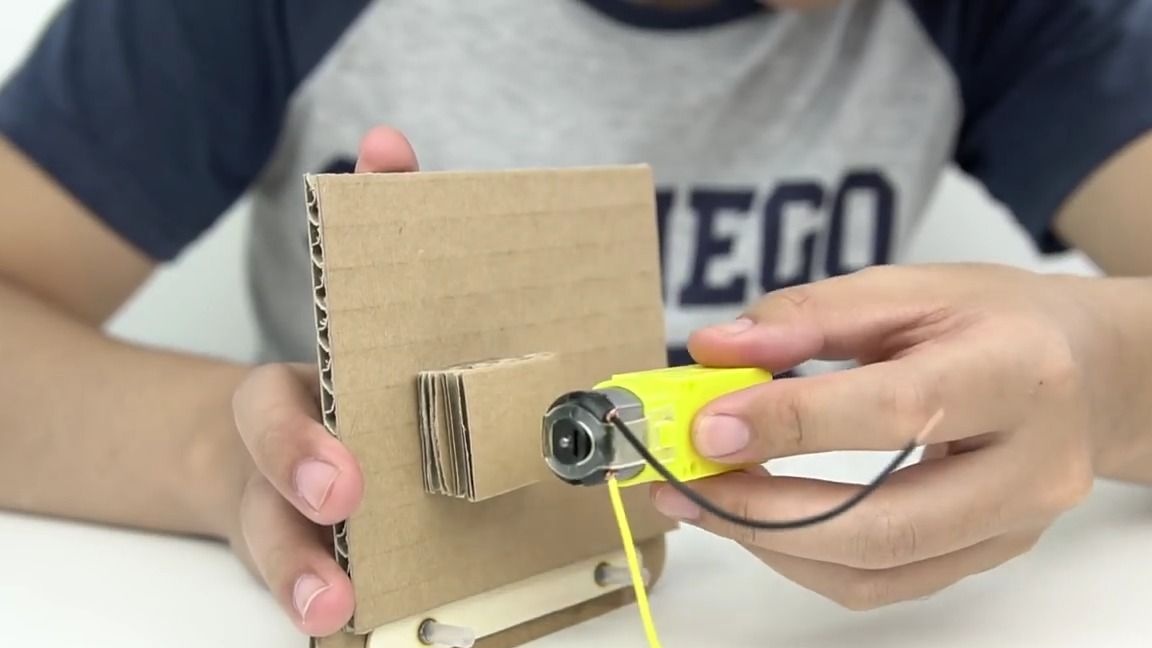
Ambil kotak gear dan gunakan gerudi untuk membuat lubang dalam paksi di satu sisi, kemudian masukkan dan gamkan "tongkat" logam ke dalamnya. Manipulasi ini mesti dilakukan dengan gear kedua:

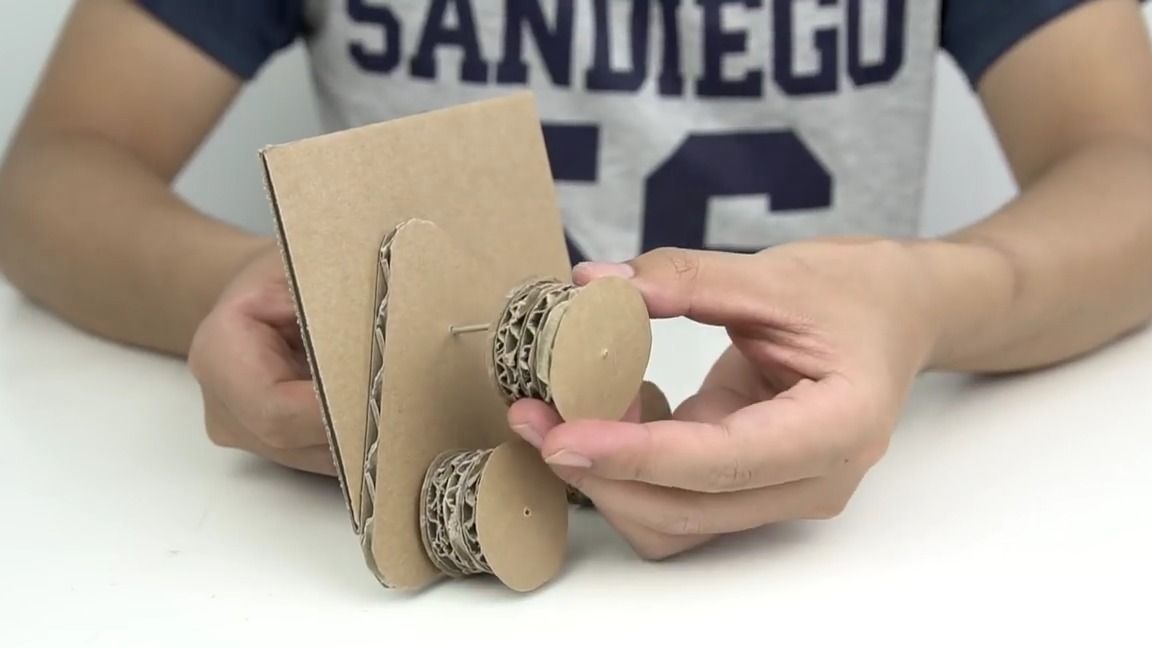
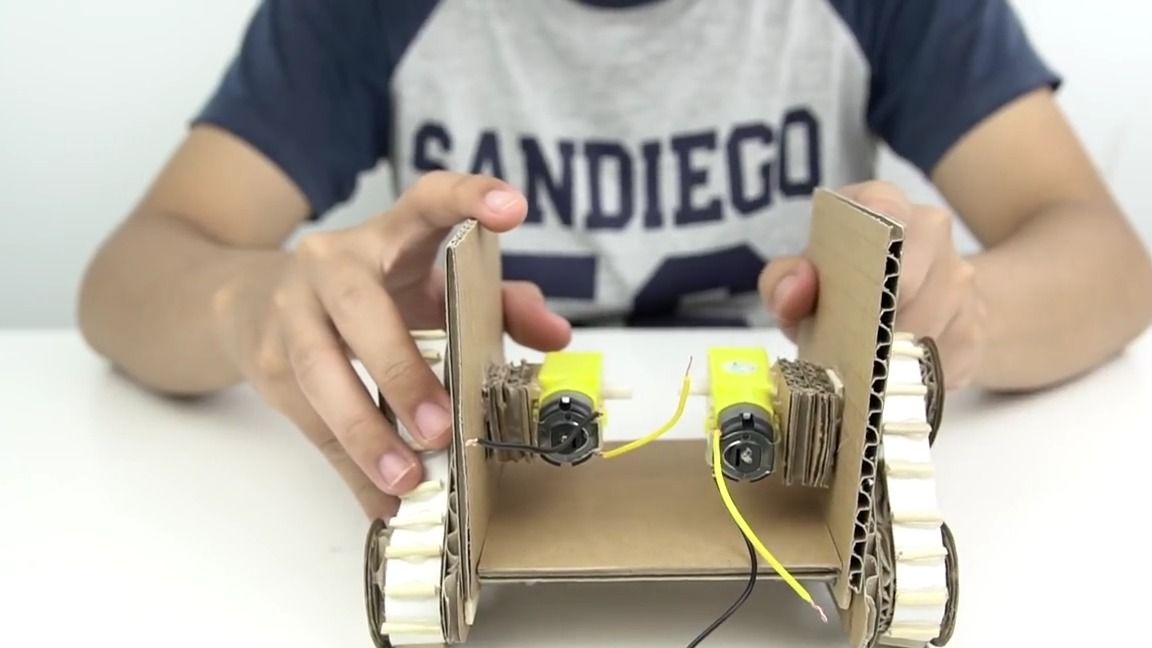
Kami melekatkan kotak gear ke laman web kami dari kotak kadbod seperti yang ditunjukkan dalam foto:
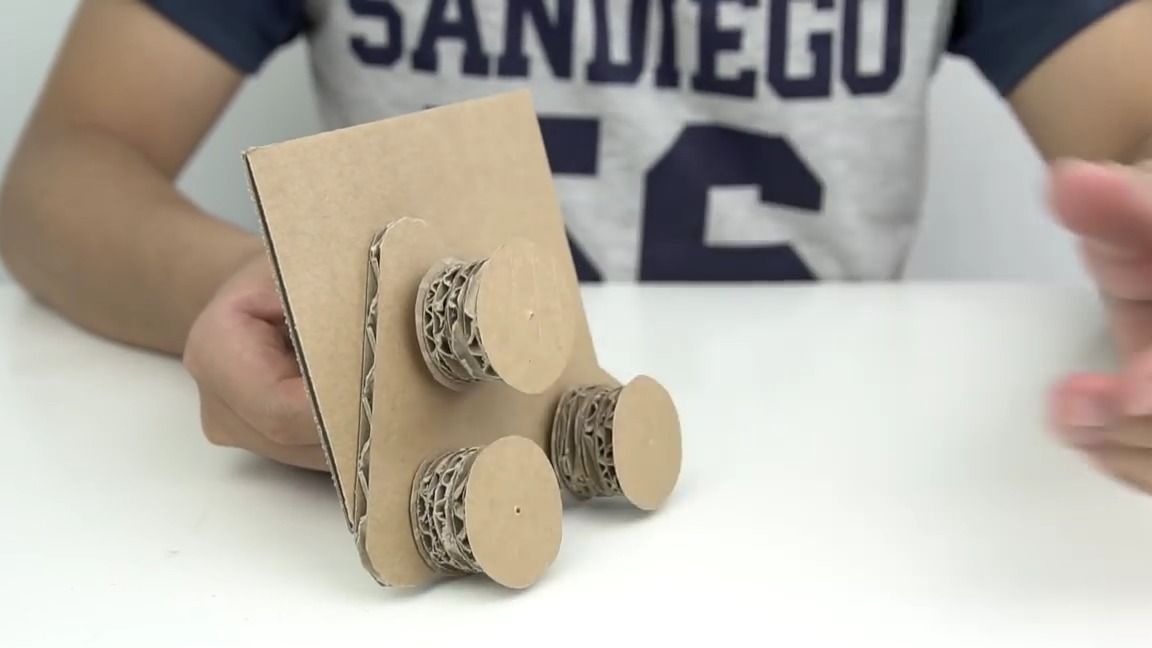
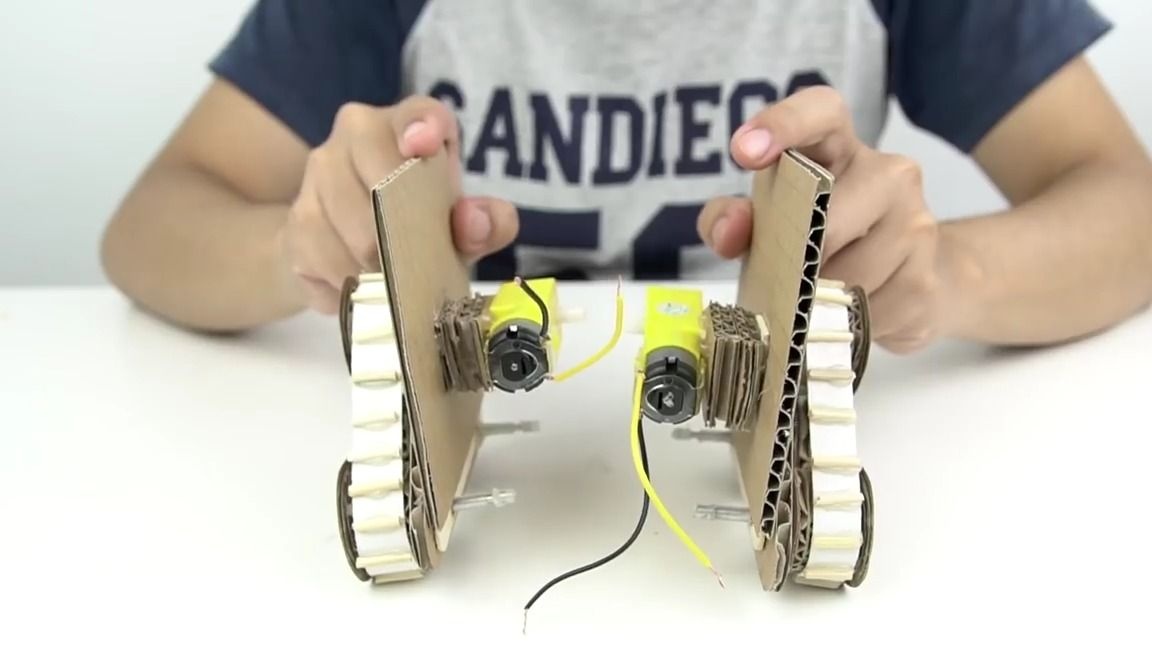
Kami membuka reka bentuk kami dan masukkan "tongkat" logam ke dalam lubang bawah dan lem mereka di sebelah yang lain, kemudian kami meletakkan mereka di kutub kami apabila blok kadbod yang kami buat sebelum ini, adalah penting bahawa ia boleh berputar. Semua yang sama mesti diulang dalam susunan simetri dan dengan reka bentuk yang berbeza:
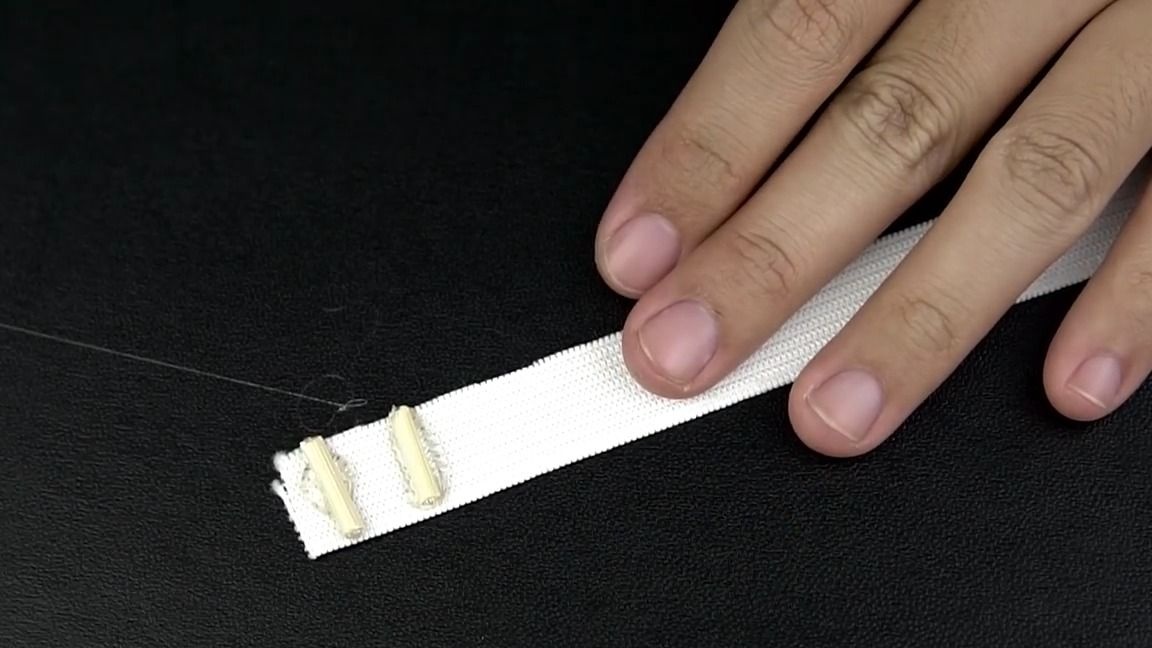
Sekarang kita perlu membuat trek untuk robot kita. Untuk melakukan ini, penulis mengambil kain getah dan mula melekat keping kayu lidi pada jarak 5-10 mm:

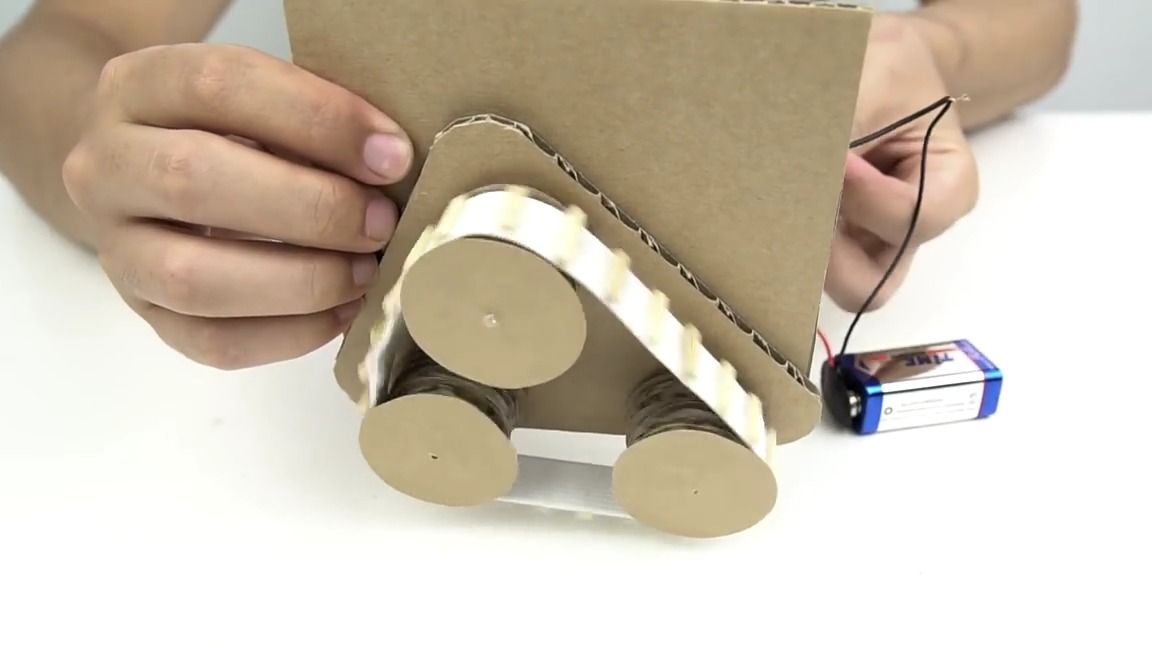
Kami meletakkan "ulat" pada blok seperti yang ditunjukkan dalam foto pada reka bentuk kertas dinding:
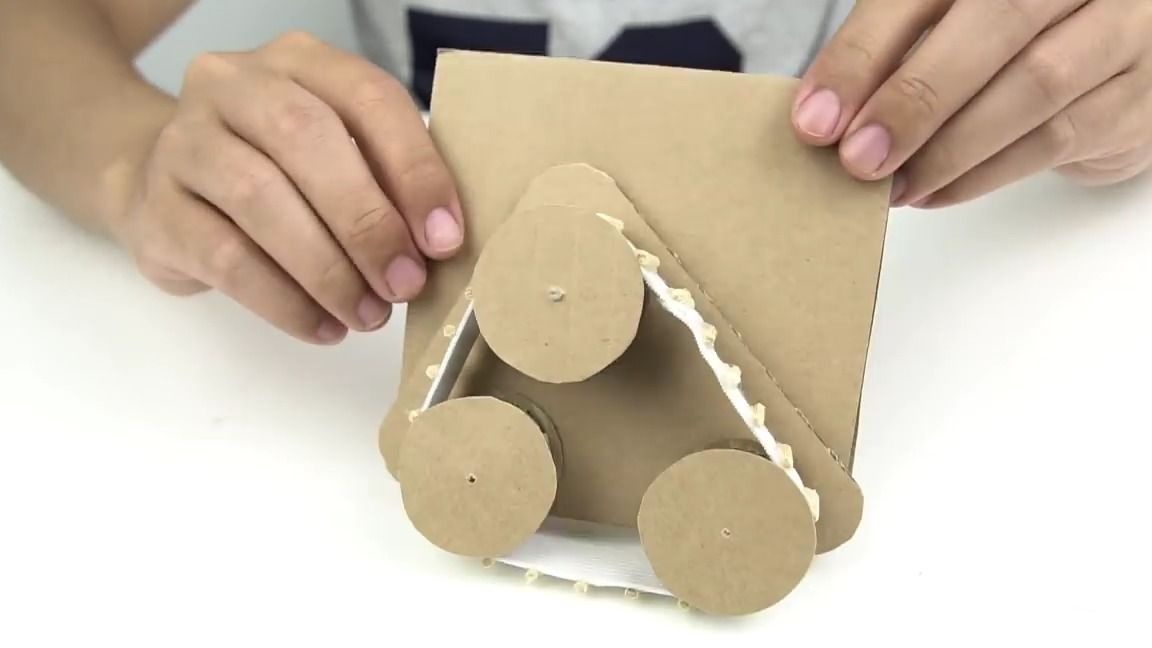
Ujian:
Kami menyambung kuasa dan jika semuanya berputar dengan bebas, maka anda boleh melakukan selanjutnya:
Potong segiempat tepat dari kadbod dan gam seperti berikut, ini akan menjadi bahagian bawah kami:

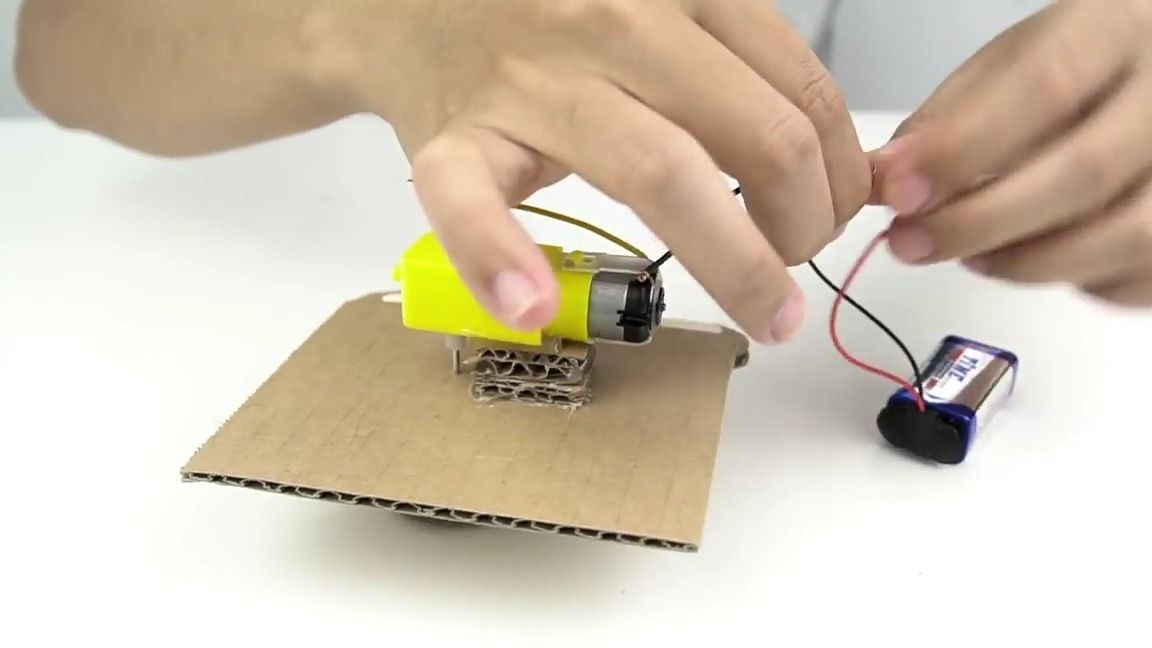
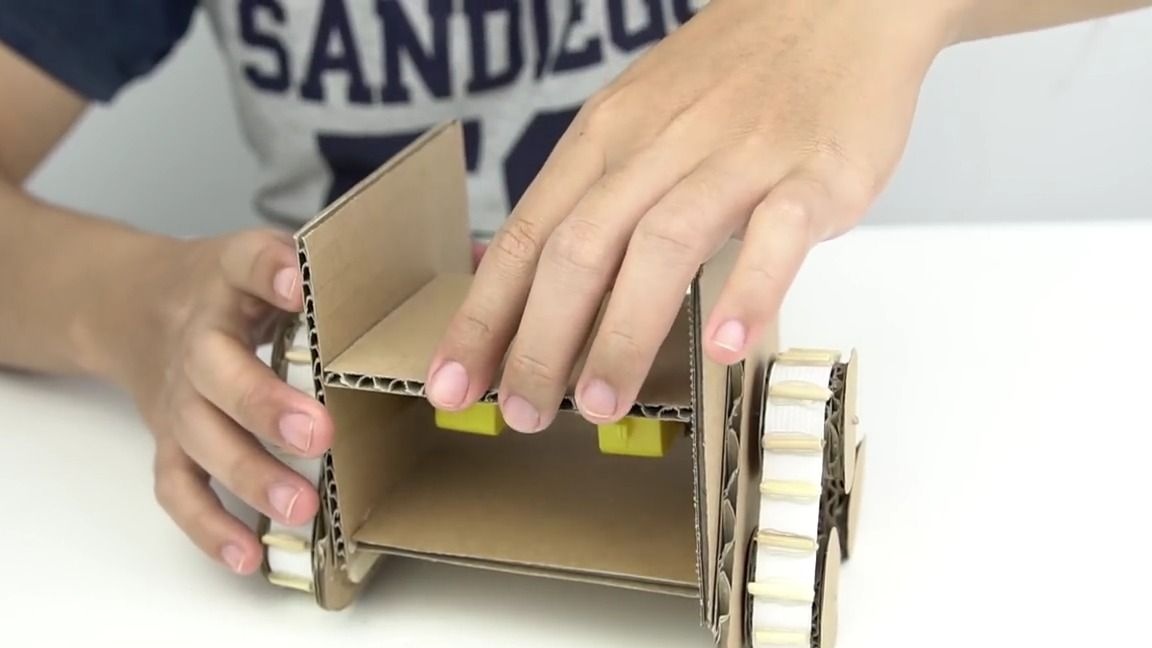
Kami memotong lagi segi empat sama sama dan melekatkan motor:
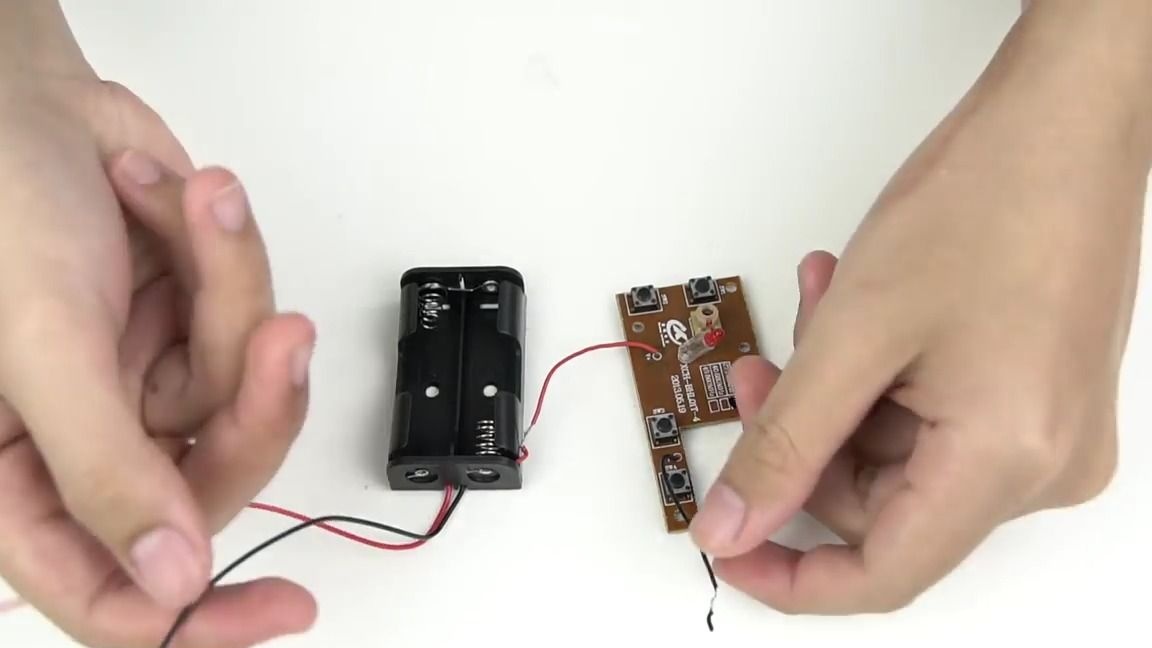
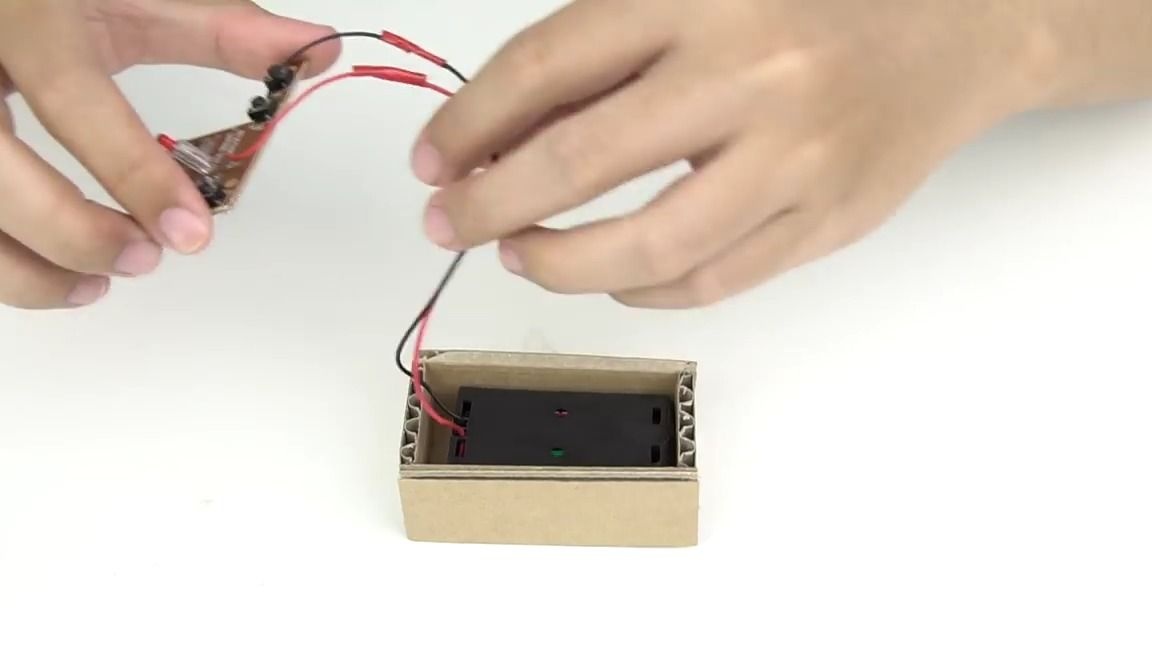
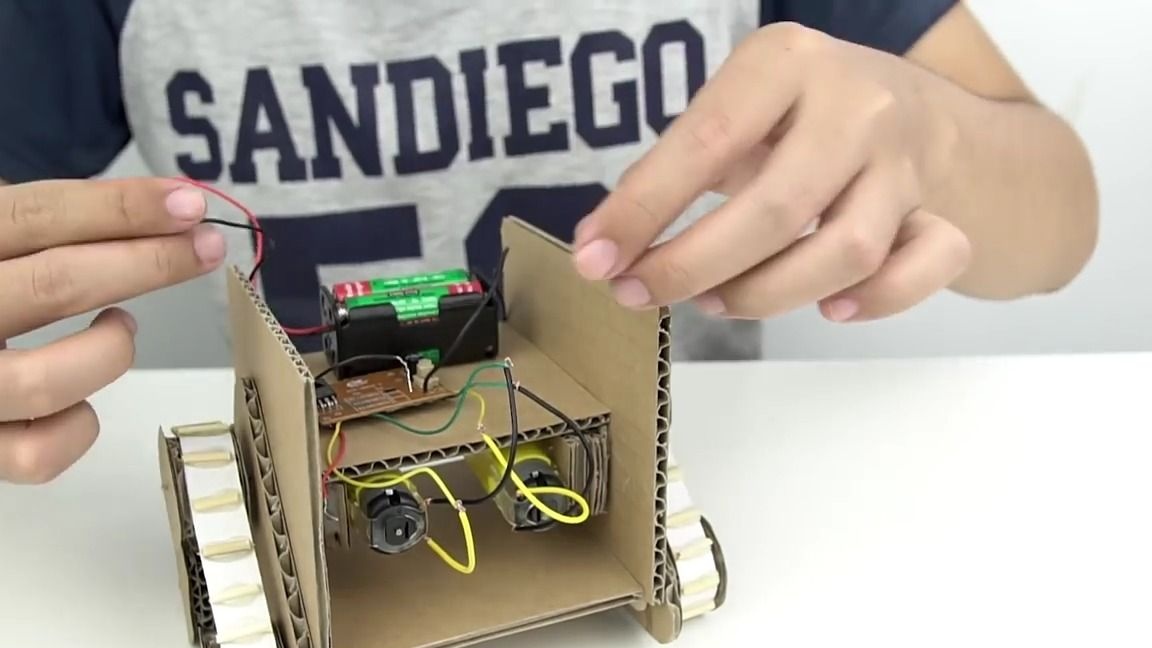
Kini kami mengambil papan pemancar dan menyambungkannya ke petak untuk dua bateri 1.5 V, memerhatikan polariti. Ia juga dinasihatkan untuk menyambungkan suis:
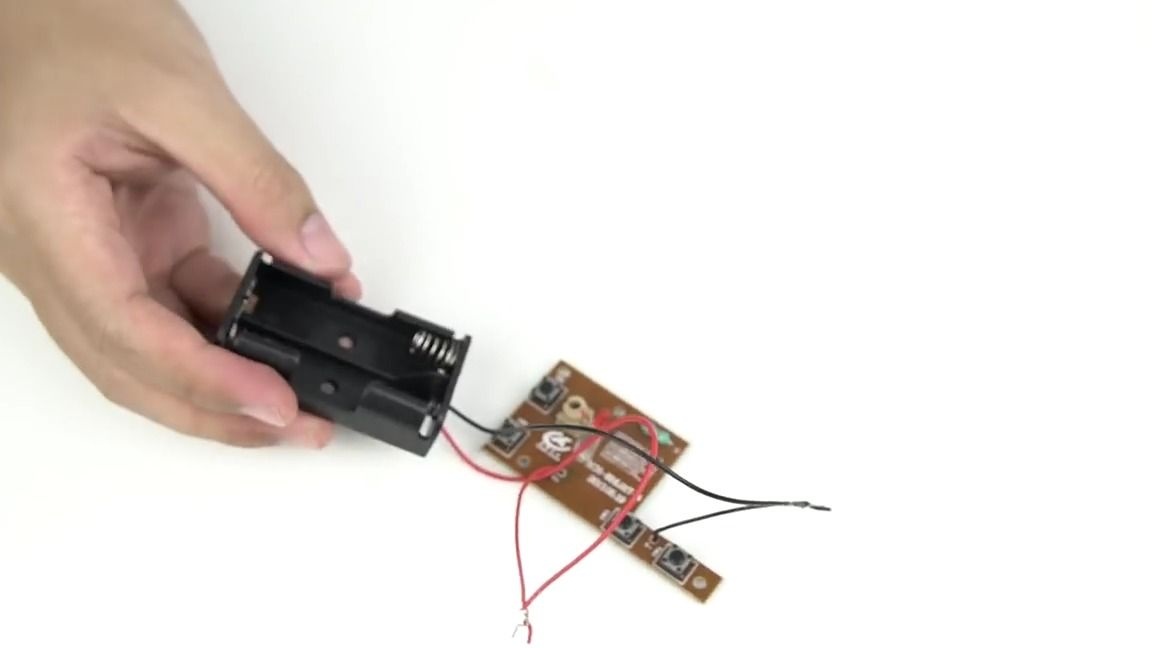
Kami mengasingkan kenalan dengan pita elektrik atau pengecutan terma dan meletakkan keseluruhannya dalam kotak kadbod, dan selepas itu kami tutup dengan penutup dengan lubang pra-potong untuk butang kawalan. Ini akan menjadi panel kawalan kami:
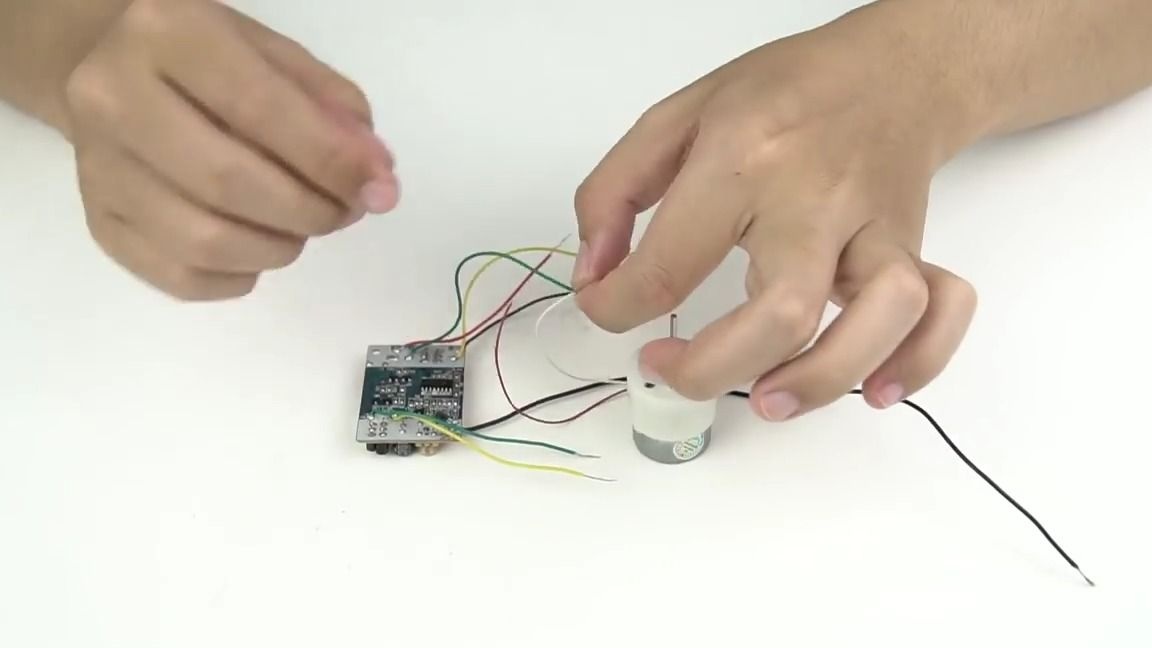
Kami mengambil papan penerima, menyambungkannya ke kuasa, kemudian hubungkannya ke mana-mana motor dan periksa robot reka bentuk kami. Sekiranya semuanya berfungsi dengan betul, anda boleh mematikan motor dan teruskan pemasangan:
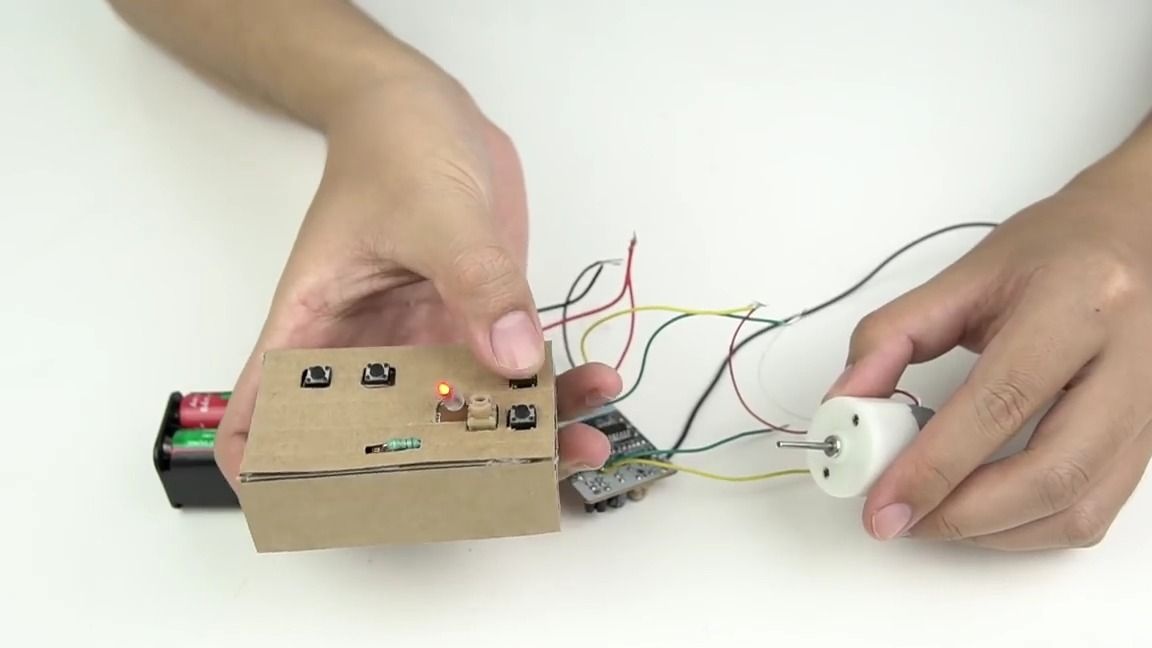
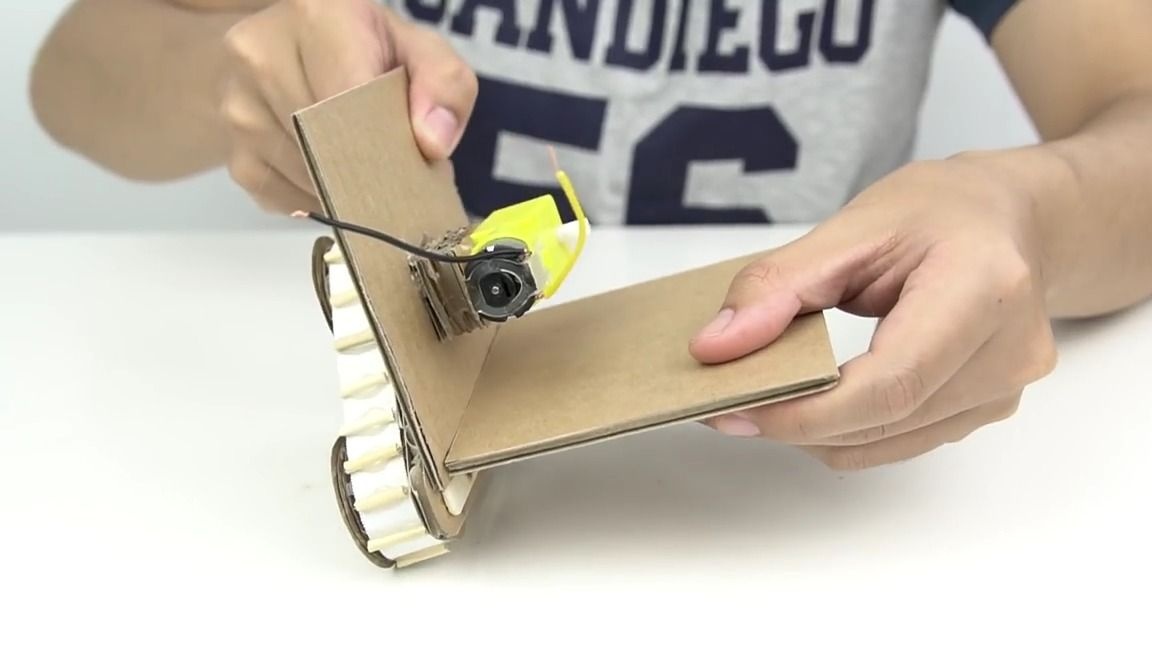
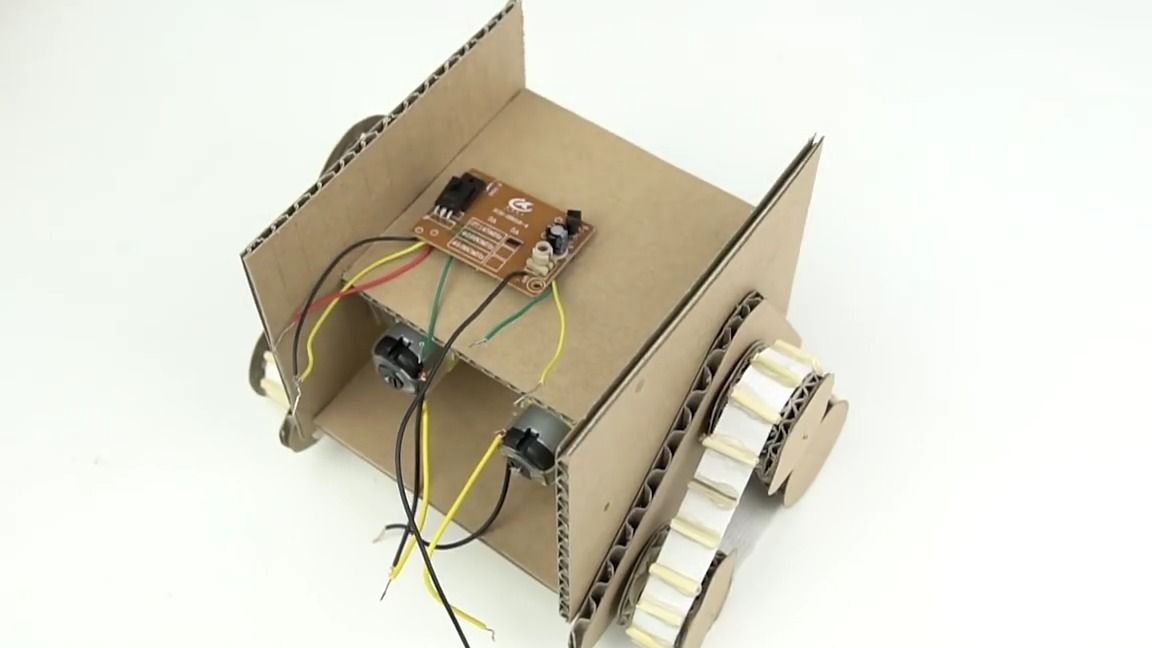
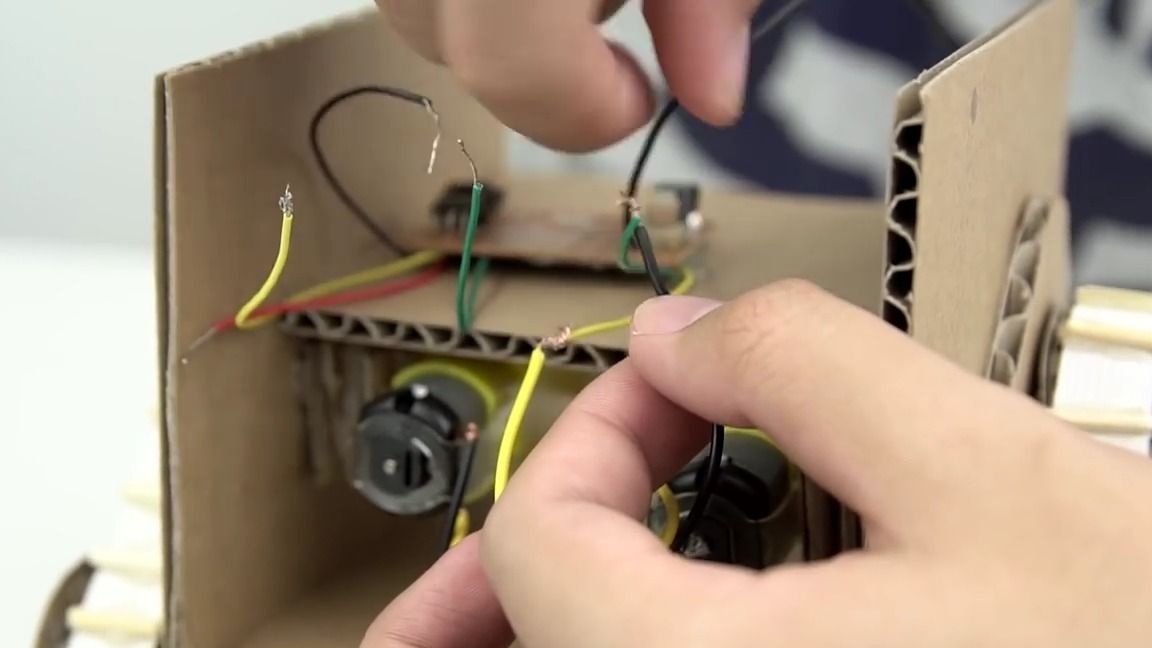
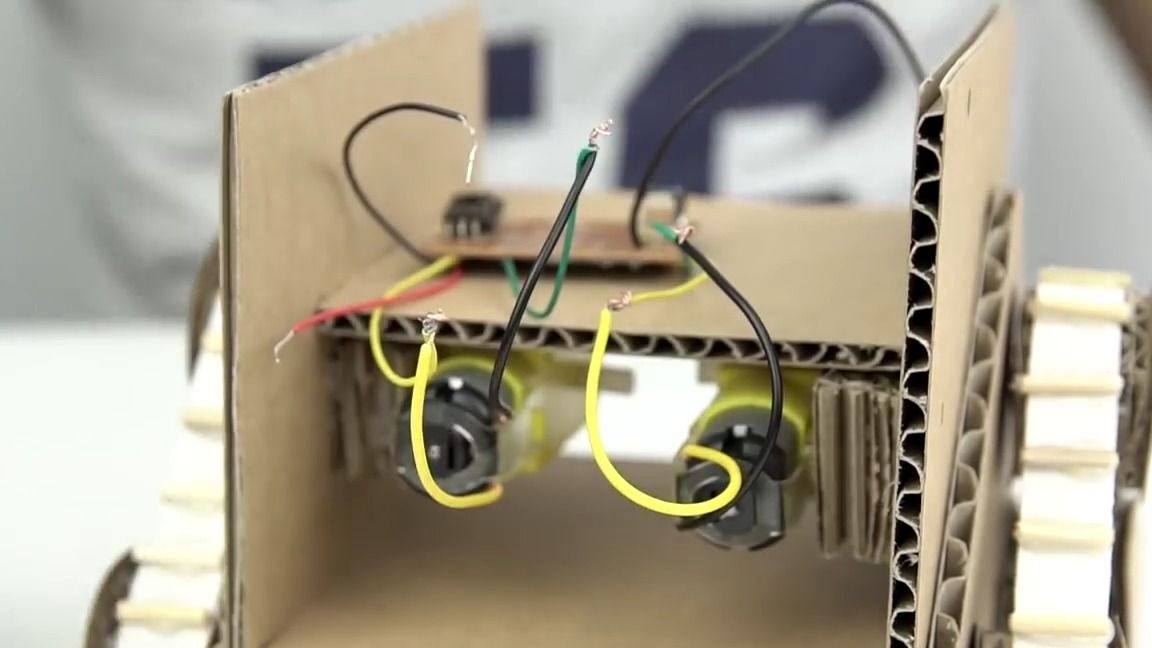
Kami melekatkan papan penerima ke bingkai robot kami dan menyambung wayar yang diperlukan dari penerima ke kotak gear yang memerhatikan polaritas yang sama, titik sambungan juga mesti dilindungi. Juga, jangan lupa untuk menyambung kuasa dan dianjurkan untuk menghidupkan suis dalam litar ini dan mengambilnya dari bingkai:
Kami memotong persegi panjang lain dari kadbod dan menutup struktur keseluruhan kami:

Sekarang anda perlu membuat mata comel dan "leher" robot dari kadbod, seperti yang ditunjukkan dalam foto:

Kami melekat dua "tangan manipulator" dari kadbod dan gam seperti berikut:
Nah, itu sahaja! Mudah kami robot itu Wally dari kadbod sudah siap dan ia tetap hanya untuk menguji! Untuk melakukan ini, hanya menghidupkan panel kawalan dan robot itu sendiri dan mengawalnya! Mainan sangat menarik dan, jika dikehendaki, anda boleh memodifikasinya entah bagaimana, sebagai contoh, tambah beberapa unsur lagi dari kadbod, lampu belakang LED dan sebagainya. Robot ini bergerak seperti casis tangki, iaitu, ia boleh berputar di sekitar paksinya, dan memandu ke hadapan dan ke belakang.
Berikut adalah video dari penulis tentang perhimpunan dan dengan ujian robot ini:
Nah, terima kasih semua untuk perhatian anda!