


Selamat petang, saya ingin berkongsi arahan tentang elektrifikasi model untuk ikatan dalam skala 1/35 Tamiya 35163 JGSDF TYPE 61 TANK. Untuk pergerakan, kami akan menggunakan kotak gear dua Tamiya 70097, dan sebagai pengawal ESP 8266-12E. Kawalan Wi-Fi menggunakan shell web.
Kita perlukan:
- Tamiya 35163 JGSDF TYPE 61 TANK (1:35)
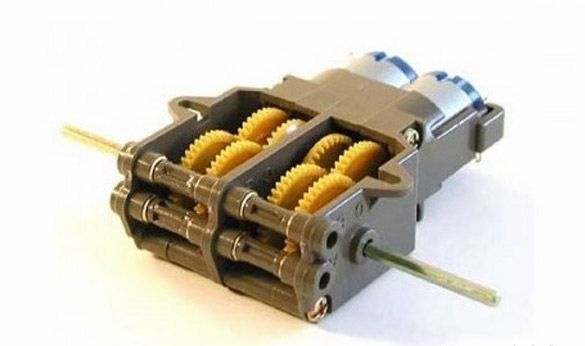
- Tamiya 70097 Kit Motor Gearbox Motor Redutcor
- gam model simen TAMIYA
- ESP 8266 -12E atau ESP 8266 -12F
- AMS 1117 3.3v 800mA - penstabil voltan
- Pemandu enjin Qifei L9110
- Kapasitor 10v 1000uF
- Ruang terbuka untuk dua bateri AAA
- 4 bateri AAA atau 4 bateri AAA 1.2V 1000mA NI-MN
- 2 ohm perintang 2 pcs.
- Resistor 10 kOhm 6 pcs.
- Butang
- suis
- USB - TTL
- papan litar
- besi pematerian
- wayar pelbagai warna
Langkah 1 Perumahan dan mekanik.
Pertama sekali, kita perlu menggelapkan kita model itu Tamiya 35163. Buka kotak:
Mulakan dengan menyusun butiran model. Bahagian-bahagian yang menonjol atau sisa-sisa rangka harus dipotong dengan pisau atau dibersihkan dengan kertas pasir. Kami memasang bahagian bawah badan mengikut arahan, anda bukan sahaja perlu memasang bahagian-bahagian untuk memasang roda pemacu. Saya hanya menggunakan butiran ini untuk mengambil gambar:

Di sisi sebaliknya ia kelihatan seperti ini:

Berhati-hatilah untuk tidak memasang roda roda dengan gam, semua roda harus berputar dengan bebas. Caterpillar di persimpangan juga harus terpaku bersama. Selepas memasang casis, lebih baik untuk membiarkannya kering sebelum melakukan tindakan selanjutnya:

Walaupun casis kering, gam di bahagian atas. Pertama, yayasan itu. Terdapat banyak bahagian kecil, lebih baik menggunakan pinset untuk merekatkan bahagian tersebut. Asas terpaku:

Kami mengumpul menara. Dua pilihan disediakan untuk menara. Perbezaannya terletak pada perincian pemasangan tong ke menara. Pilihan pertama adalah gunung standard, yang kedua dengan perlindungan habuk. Ia bernilai memilih mana yang paling anda sukai. Perbezaan ini hanya ditunjukkan dalam penampilan. Dia meletakan model pada cuti Tahun Baru, jadi dia juga berpakaian tangki:

Campurkan bersama dan biarkan kering:

Walaupun model pengeringan, mari kita teruskan untuk memasang motor gear. Kami akan menggunakan motor gear dan motor yang dihasilkan oleh syarikat yang sama seperti model, iaitu Tamiya 70097:
Arahan yang datang dengan kit itu tidak mempunyai bahasa Rusia, tetapi ia sudah difahami.Dua pilihan perhimpunan digambarkan dengan terperinci:
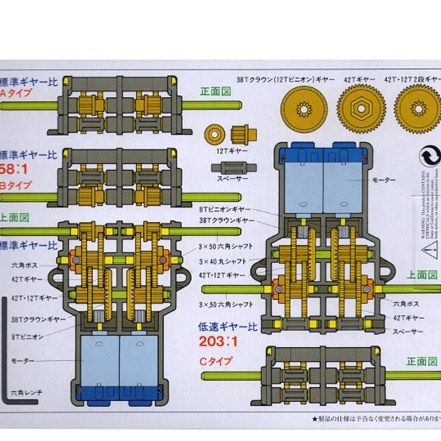
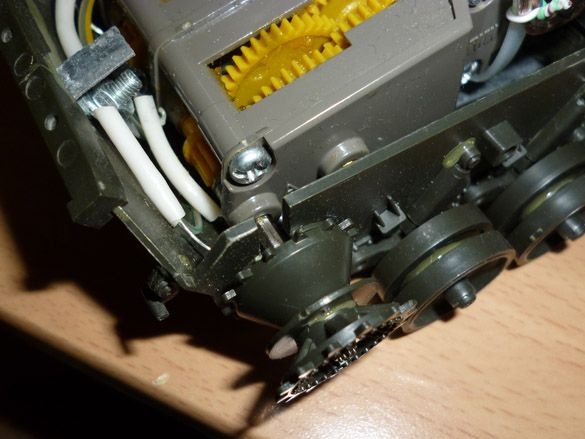
Dalam kes pertama, nisbah gear ialah 58: 1, yang kedua - 203: 1. Kami menggunakan pilihan pertama. Aci output kotak gear harus melalui lubang pusat. Mata sisi kotak gear harus dipotong, mereka akan mengganggu pemasangan pada model. Jika tidak, kotak gear agak mudah untuk dipakai pada model. Kemudian kami meletakkan gear kecil pada motor dan memasukkannya ke dalam gearbox. Untuk setiap motor, satu perintang 2 ohms harus disolder ke salah satu kenalan. Kami memateri satu dawai ke perintang, dan wayar kedua ke sentuhan kedua motor. Setelah selesai memasang motor, kami meletakkan motor roda dipasang pada model. Keluarkan menggunakan gam.
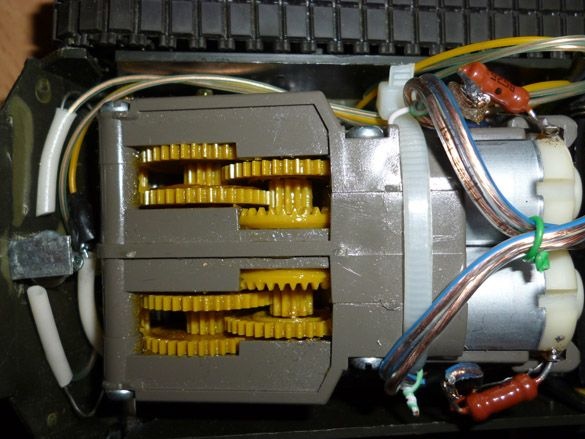
Kami juga memandu roda pemanduan ke aci keluaran.
Rancangan masa depan termasuk menambah fungsi giliran turet dan, mungkin, menembak senjata. Dalam arahan berikut saya akan cuba untuk menerangkan pengubahsuaian ini.
Langkah 2 Elektrik.
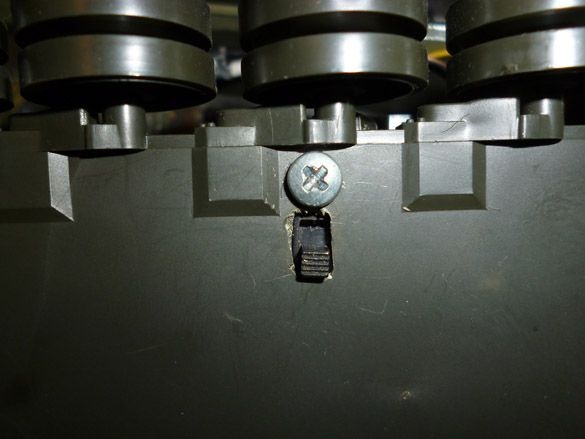
Setelah mengumpul model, dan menunggu pengeringan lengkap, pergi ke e pemadat. Di bahagian bawah kita memotong suis:
Dua petak bateri dis solder secara siri dan terpaku bersama. Kami juga mengeluarkan penyambung mudah di penghujung wayar.

Untuk kuasa model, anda boleh menggunakan bateri AAA ("orang kecil") atau bateri AAA Ni-Mn 1.2 volt.
Ambil ESP8266. Ini adalah modul kecil tetapi agak berfungsi, dan modul Wi-Fi terbina dalam menyediakan sambungan rumah Rangkaian Wi-fi. Saya cadangkan memilih modul dengan memori 4 Mb. Untuk menjalankan dan menyalakan ESP-8266 ESP, anda mesti memasang pengikatan minimum. Modul ini dikuasakan oleh 3.3 volt. Ia tidak dapat disambungkan terus ke sumber kuasa yang tidak stabil. Oleh itu, kita termasuk dalam litar penstabil voltan AMS 1117 3.3v. Pin VCC disambungkan terus ke kabel kuasa positif dari penstabil, dan pin yang lain: CH_PD, RESET, GPIO0, GPIO2, mesti disambungkan melalui perintang, iaitu, ditarik ke bekalan kuasa (VCC). Adalah disyorkan untuk menggunakan 10kOm perintang, tetapi mereka boleh diganti dengan yang lain dari 4.7kOm hingga 50kOm. Tidak mustahil untuk menukar hanya perintang GPIO15, nilai mukanya hendaklah sehingga 10k. Secara langsung, kita menyambungkan GND ke wayar kuasa negatif (GND). Untuk memasukkan mod firmware modul, GPIO0 mesti disambungkan ke GND. Butang diperlukan untuk reboot modul apabila ia diterangkan. Kesimpulan Tx, Rx, GND dibuat dalam penyambung USB-TTL. Sambungan USB-TTL adalah seperti berikut:
ESP 8266 - USB-TTL
Tx - Rx
Rx - Tx
GND - GND
Skim ini adalah seperti berikut:

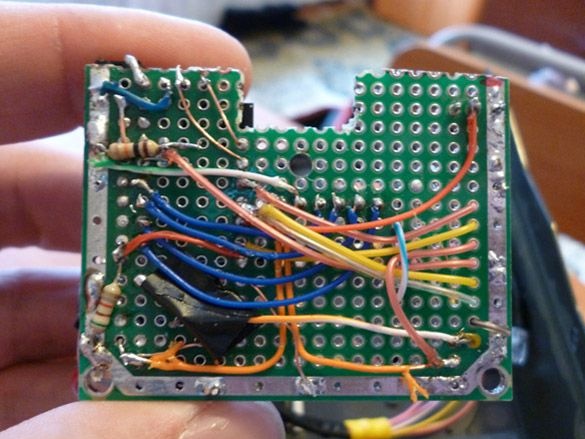
Ia adalah paling mudah untuk meletakkan semuanya di papan litar kecil:
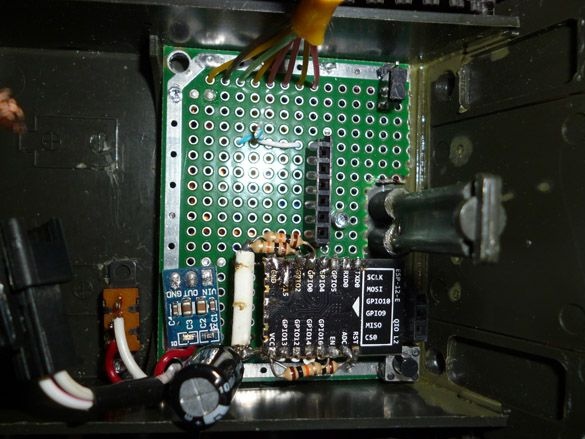
Kami menetapkan papan litar di belakang tangki:
Petak bateri diletakkan di antara motor gear dan papan litar:

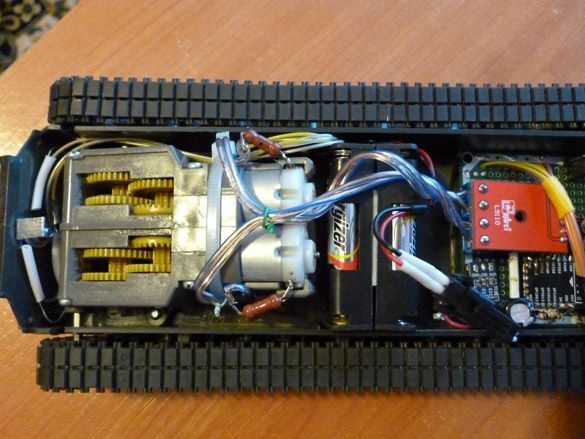
Semua elektrik dipasang dan dipasang terletak di bahagian bawah tangki:
Langkah 3 Perisian.
Untuk mengedit dan mengisi lakaran dalam ESP, anda perlu memuat turun Arduino IDE dari laman web rasmi
Arduino.cc.
Kemudian pasangkan Arduino IDE. Selepas itu, kami terus memasang add-on untuk ESP. Kami melakukan ini melalui Pengurus Lembaga Pengarah. Mula-mula, mulakan Arduino IDE, kemudian Fail - Settings - dalam URL Pengurus Pengurus Tambahan bidang, masukkan pautan:
http://arduino.esp8266.com/package_esp8266com_index.jsonklik OK (anda boleh memasukkan beberapa pautan yang dipisahkan oleh koma dalam bidang ini). Kemudian pergi ke Tools - Board - Board Manager dalam bidang penapis, masukkan esp8266 dan pilih ESP8266 oleh ESP8266 Community Forum. Klik Pasang dan tunggu muat turun selesai. Sekarang kita pilih dalam menu Tools - Board - Generic ESP8266 kita meletakkan kekerapan modul anda 80 atau 160Mhz, saiz memori flash. Kemudian pilih port bersiri yang mana penyesuai USB-TTL disambungkan.
Sekarang anda perlu memasang alat untuk mengakses sistem fail ESP. Untuk melakukan ini, pindahkan fail dalam arkib ke folder alat, yang boleh didapati di direktori root Arduino IDE.
Langkah 4 Lakaran
Sekarang bahawa persekitaran pengaturcaraan sudah siap, mari kita teruskan untuk mengedit lakaran. Buka lakaran:
Pada permulaannya, kita mencari medan "String _ssid =" ";". Antara petikan, tunjukkan titik akses mana yang hendak disambungkan.
Bidang "String _password =" ";" - digunakan untuk merakam kata laluan untuk rangkaian ini.
Jika ESP tidak dapat menyambung ke rangkaian yang ditunjukkan dalam baris sebelumnya, pengawal akan membuat rangkaian yang boleh disambungkannya.
Bidang "String _ssidAP =" ";" - menandakan nama rangkaian yang dicipta.
Field "String _passwordAP =" 12345678 ";" - Menetapkan kata laluan rangkaian yang dibuat.
Bidang "String SSDP_Name =" ESP_Wi-Fi ";" - Menetapkan nama SSDP.
Setelah menyunting semua baris di atas, anda perlu memuat naik cangkang web ke ESP 8266. Kami menyambung ESP 8266 melalui USB-TTL ke komputer mengikut rajah di atas. Dalam Arduino IDE, pilih Alat - ESP8266 Muat Naik Data Sketch. Kami sedang menunggu untuk akhir proses muat naik fail. Kini anda boleh merakam lakaran itu sendiri. Pertama, masukkan ESP8266 ke dalam mod firmware. Untuk melakukan ini, sambungkan GPIO0 ke GND. Tekan butang isian lakaran, dan kemudian tekan butang set semula pada modul EPS. Menunggu lakaran untuk menyelesaikan pengisian.
Saya akan menerangkan sedikit algoritma ESP 8266. Apabila bermula, EPS cuba menyambung ke rangkaian Wi-Fi yang dinyatakan dalam medan Stell _ssid. Jika atas sebab tertentu ini gagal, ESP menaikkan rangkaiannya dengan nama yang dinyatakan dalam medan ssidAP. Dalam kes pertama, anda boleh mengawal tangki melalui mana-mana peranti yang disambungkan ke rangkaian yang sama. Dalam kes kedua, anda perlu menyambung ke ESP melalui mana-mana peranti, tablet, telefon atau komputer. Seterusnya, dalam pelayar peranti yang kami akan mengawal tangki, anda perlu memasukkan alamat IP tangki. Anda boleh mengetahui alamat IP dengan menyambungkan ESP ke komputer, kemudian buka tetingkap terminal dan mulakan semula ESP. Apabila dilancarkan, alamat IP tangki akan ditulis dalam tetingkap terminal. Atau anda boleh menentukan alamat IP tetap yang diberikan oleh ESP dalam tetapan penghala Wi-Fi. Juga, jika anda menggunakan komputer dengan Windows, anda boleh masuk ke dalam infrastruktur rangkaian, cari tangki kami di sana dan klik dua kali untuk menyambungkannya. Sekiranya ESP itu sendiri menaikkan titik akses, alamat IP tangki akan menjadi 192.168.1.1.
Antara muka web ditulis dalam HTML dan terdiri daripada dua muka surat. Yang pertama mengandungi arahan kawalan. Pada kedua, anda boleh mengubah tetapan ESP 8266. Pada halaman tetapan, parameter berikut tersedia untuk perubahan: nama titik akses yang anda hendak sambungkan, kata laluan titik akses ini, nama tangki, nama rangkaian yang dibuat dan kata laluan untuk menyambung ke rangkaian ini. Semua perubahan akan berkuat kuasa hanya selepas reboot. Ciri reload ESP juga boleh didapati daripada antara muka web.
Selepas menyelesaikan semua kerja, tangki boleh dicat menggunakan cat model. Tangki yang dicat kelihatan lebih cantik:

Saya tidak mempunyai kesabaran untuk pekerjaan sedemikian. Oleh itu, model saya dibiarkan tanpa lukisan:

