


Selamat siang, hari ini saya ingin berkongsi arahan mengenai membuat tangki. Terdapat dua pilihan untuk pengawal dalaman: ESP -8266 dan Arduino Pro Mini. Dalam versi pertama, kawalan dilakukan melalui komunikasi Wi-Fi. Dalam kedua - jauh IR. Ia dibuat berdasarkan TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35), didorong oleh Tamiya 70097 Twin-Motor Gearbox Kit dan motor yang dilengkapi dengan gearbox.
Kita perlukan:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- gam model (TAMIYA Cement misalnya)
- Tamiya 70097 Kit Motor Gear Twin
- ESP 8266 -12E atau Arduino Pro Mini 8MHz 3.3V
- penstabil voltan AMS 1117 3.3v 8000mA (jika pilihan dengan ESP 8266-12E)
- Pemandu enjin Qifei L9110
- kapasitor 10v 1000uF
- Dua warna (merah, hijau) LED
- LED biru
- 2 LED merah
- Penerima IR
- photoresistor
- 2 kompartemen untuk 2 bateri AAA atau 4 bateri AAA 1.2V 1000mA NI-MN
- 2 resistor 2ohm
- 4 resistor 75 ohms
- 6 resistor 10 kOhm (jika pilihan dengan ESP 8266-12E)
- butang
- photoresistor
- USB - TTL
- besi pematerian
- wayar pelbagai warna
Langkah 1 Perumahan dan mekanik.
Pertama anda perlu mengumpul model itu TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35). Kami melekatkan bahagian bawah mengikut arahan, kecuali bahagian-bahagian yang meliputi lubang keluar untuk lubang gearbox. Bintang-bintang terkemuka juga tidak melekat. Gunting bahagian atas mengikut arahan tanpa perubahan. Setelah menempel semua ini, tinggalkan untuk pengeringan dan teruskan ke pengumpulan kotak gear. Seperti yang dapat dilihat dari arahan Tamiya 70097 boleh dipasang dalam dua versi berbeza.
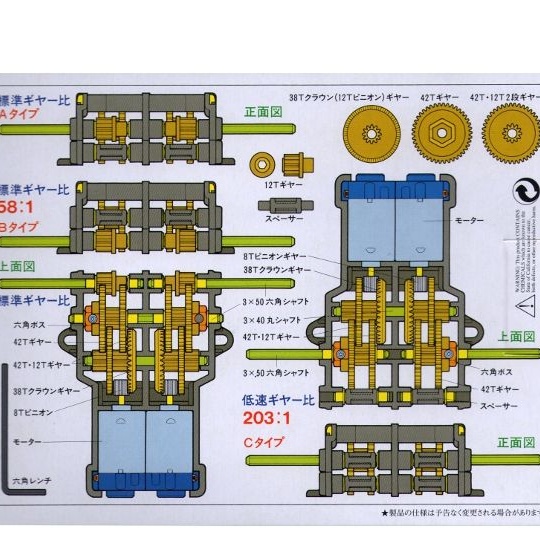
Pilihan pertama dengan nisbah gear 58: 1, yang kedua - 203: 1. Kita perlu pilihan pertama. Dan di sini juga tidak begitu mudah. Dalam kes ini, output paksi mungkin lebih dekat ke bahagian bawah kotak gear atau di tengah. Gegaran mesti dibuang ke dalam lubang tengah! Setelah dipasang kotak gear, kami terus memasangnya pada model. Secara teori, semuanya haruslah mudah, kerana kedua-dua model dan kotak gear satu firma. Dalam praktiknya - kotak gear perlu ditolak di sana. Dalam kedudukan mendatar kotak gear, batang roda pemacu melambung ke atas, jadi saya terpaksa memotong plat logam, yang memungkinkan untuk memasang kotak gear pada kedudukan yang dikehendaki.

Gandar kotak gear perlu dipotong 3 mm. Kemudian gam roda pemacu pada mereka.

Di bahagian atas lebih dekat ke belakang, kami membuat lubang untuk LED dua warna dan penerima IR.

Lebih dekat ke hadapan adalah lubang untuk LED biru yang akan berfungsi sebagai lampu suluh.

Dan di dalam menetas - untuk fotoresistor.

Di bahagian belakang, gam LED merah untuk pencahayaan.

Untuk semua perkara di atas, anda perlu memasang kabel. Lebih mudah untuk melakukan ini sebelum pemasangan.
Langkah 2 Jurutera
Di sini saya akan menyediakan pilihan untuk pemasangan lanjut.
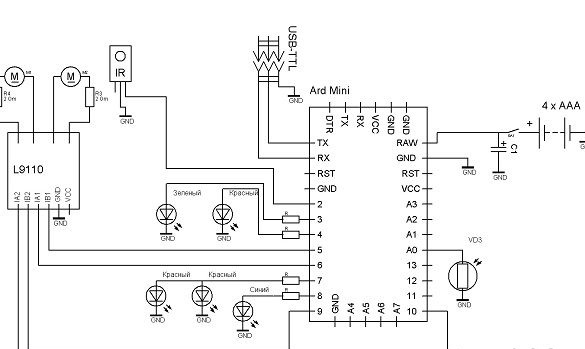
Jika anda memilih ESP 8266. Modul Wi-Fi terbina dalam sangat memudahkan proses kawalan dan sambungan.Ia boleh diprogram dengan mudah di Arduino IDE. Lebih baik memilih modul dengan memori 4 Mb. Dalam kes ini, adalah perlu untuk mengumpul abah-abah minimum untuk memulakan dan berkelip ESP-8266. Hanya pin VCC yang disambungkan terus ke bekalan kuasa, pin yang lain: CH_PD, RESET, GPIO0, GPIO2, mesti ditarik ke bekalan kuasa (VCC) melalui perintang. Resistor 10kOm boleh diganti dengan yang lain, dari 4.7kOm ke 50kOm, kecuali GPIO15 - nilainya mesti sehingga 10k. Secara langsung, ke tolak (GND) bekalan kuasa, kita menyambungkan GND sahaja, dan kita juga tarik GPIOO melalui perintang kepada 10kOm, untuk meletakkan modul ke dalam mod muat turun firmware, ke GND. Butang diperlukan untuk reboot dan berkelip modul. Penyambung USB-TTL - untuk firmware.
Inilah gambarajah
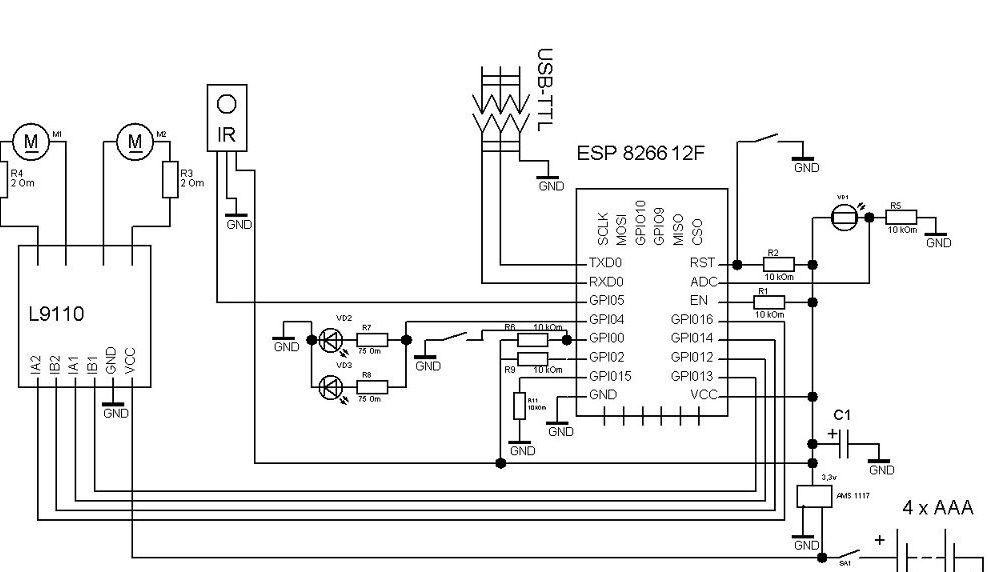
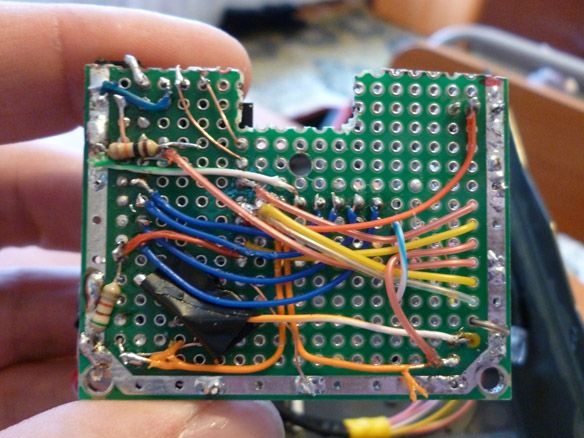
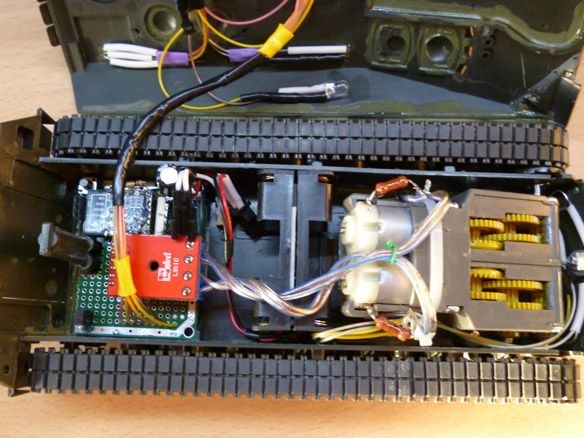
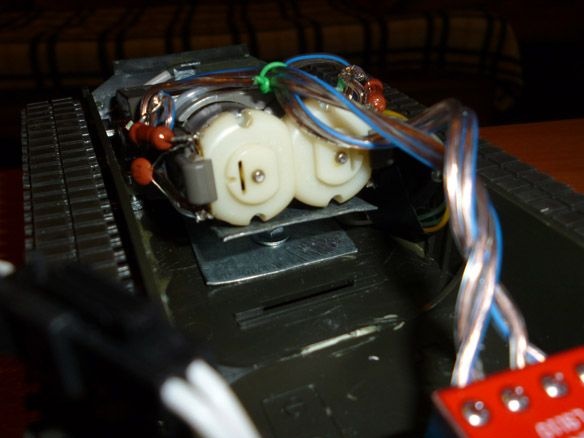
Biarkan saya terangkan sedikit, LED biru dan dua merah diperlukan untuk lampu belakang (ia kelihatan dan cantik dalam gelap), photoresistor disambungkan kepada ADC pengawal dan diperlukan untuk menentukan pencahayaan (apabila lampu latar menjadi gelap). 10 kOhm pull-up resistor, 75 Ohm untuk LED, 2 ohm semasa mengehadkan untuk motor (tanpa mereka, ketika cuba bergerak, pengawal overloaded). Kami menyolder segala-galanya mengikut litar di papan litar. Untuk bekalan kuasa, anda boleh menggunakan 4 "bateri" kecil atau empat bateri saiz AAA, yang dipateri secara siri. Kami melekat dua bahagian dua bateri dengan pita bermuka dua dan sambungkan siri. Kedua-dua petak dan akumulator bateri diletakkan di antara kotak gear dan papan litar.

Sekiranya pilihan anda jatuh pada Arduino. Hanya Arduino Pro MINI yang sesuai di dalamnya. Ia bernilai memilih papan 3.3 volt, kerana motors direka untuk 3 volt, dan anda tidak mahu secara berasingan menggerakkan motor dan Arduino. Arduino lebih mudah. Kendali pengawal dan pengawal selia voltan sudah di papan sendiri. Ia tetap tidak melepaskan soket Arduino dan pemandu motor di papan litar.

Langkah 3 Menyediakan persekitaran pengaturcaraan.
Untuk mengedit firmware dan mengisi lakaran dalam ESP, anda perlu memasang Arduino IDE dari laman rasmi Arduino.cc, serta memasang add-on untuk ESP melalui Pengurus Papan. Untuk melakukan ini, mulakan Arduino IDE, kemudian Fail - Settings - dalam bidang Pengurus Pengurus Tambahan bidang, masukkan pautan
http://arduino.esp8266.com/package_esp8266com_index.jsonklik OK (anda boleh memasukkan beberapa pautan yang dipisahkan oleh koma dalam bidang ini). Alat Seterusnya - Pengurus Papan Lembaga, masukkan esp8266 dalam medan penapis dan klik ESP8266 oleh Forum Komuniti ESP8266. Klik Pasang dan tunggu muat turun selesai. Kini ia tetap memilih Board - Generic ESP8266 dalam menu Tools dan tetapkan kekerapan modul anda kepada 80 atau 160Mhz, saiz memori flash dan pilih port bersiri yang penyambung USB-TTL disambungkan.
Untuk Arduino, pasang Arduino IDE dari laman web rasmi Arduino.cc.
Langkah 4 Firmware
Ia tetap untuk mengedit lakaran dan isi dengan ESP.
Dalam bidang "String _ssid =" ";" antara tanda petikan menunjukkan titik akses yang hendak disambungkan.
"String _password =" ";" adalah kata laluan untuk rangkaian ini.
"String _ssidAP =" Mardella ";" nama rangkaian yang ESP akan menaikkan jika ia tidak bersambung dengan yang sedia ada.
"String _passwordAP =" 12345678 ";" - kata laluan rangkaian yang ESP akan menaikkan jika ia tidak bersambung dengan yang sedia ada.
"String SSDP_Name =" Mardella ";" Nama SSDP
Selepas bermula, ESP cuba menyambung ke titik akses yang ditentukan dalam lakaran, jika berjaya, anda perlu menentukan alamat IP robot kami dan menyambung ke alamat ini melalui penyemak imbas. Anda juga boleh melalui komputer ke infrastruktur rangkaian, mencari tangki kami di sana dan klik dua kali untuk menyambung ke sana. Sekiranya sambungan gagal, ESP menjadi titik akses. Kemudian akses boleh didapati dengan menyambung ke titik akses baru dan memasukkan 192.168.1.1 dalam penyemak imbas.
Antara muka web terdiri daripada dua muka surat. Yang pertama untuk mengawal. Yang kedua adalah untuk penyesuaian. Di halaman kedua, anda boleh menentukan titik akses yang anda mahu sambungkan, serta nama tangki dan nama dan kata laluan titik akses yang ESP menimbulkan. Semua perubahan berlaku selepas reboot. Anda juga boleh memulakan semula modul melalui antara muka web.
Untuk Arduino, anda perlu mengedit semua bidang "results.value". Setelah menulis kod IR kawalan jauh yang anda akan gunakan di sana.

Video tanchika: