
Hari ini kita akan membuat mesin dikawal radio kecil, bukan hanya mesin, tetapi peranti perisik sebenar.
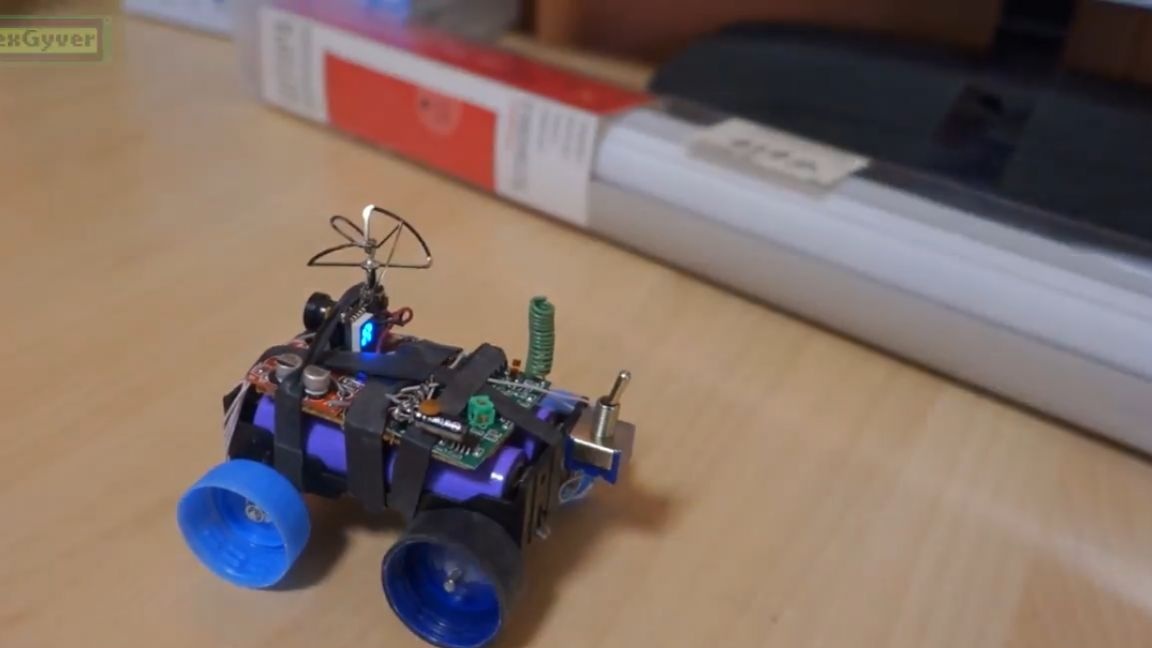
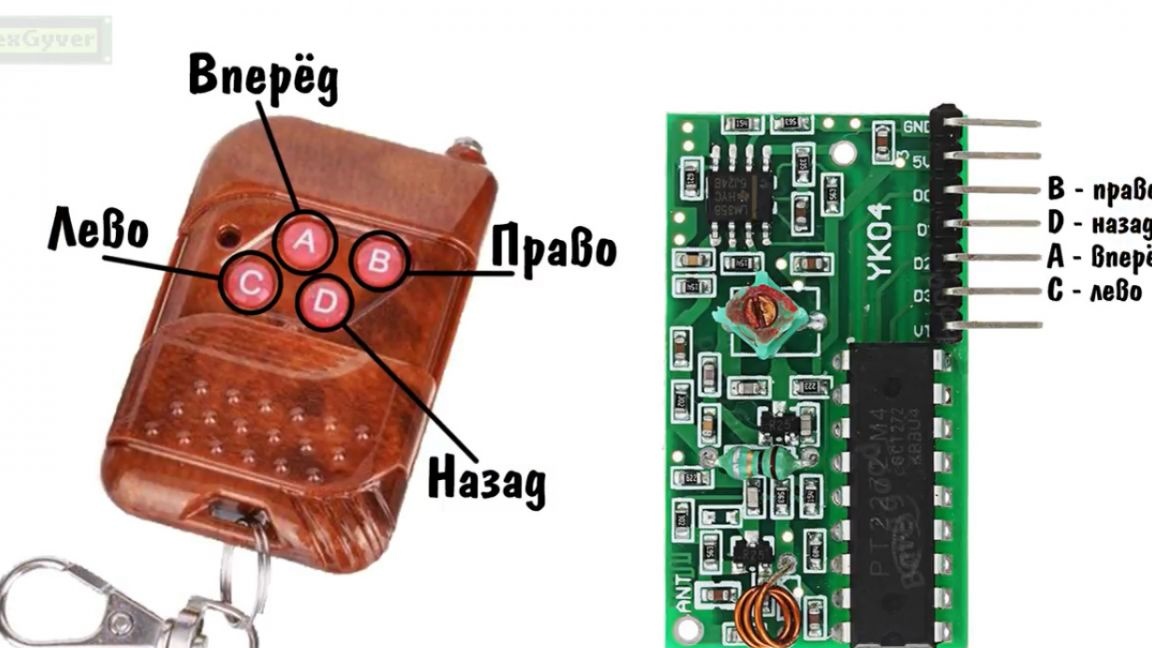
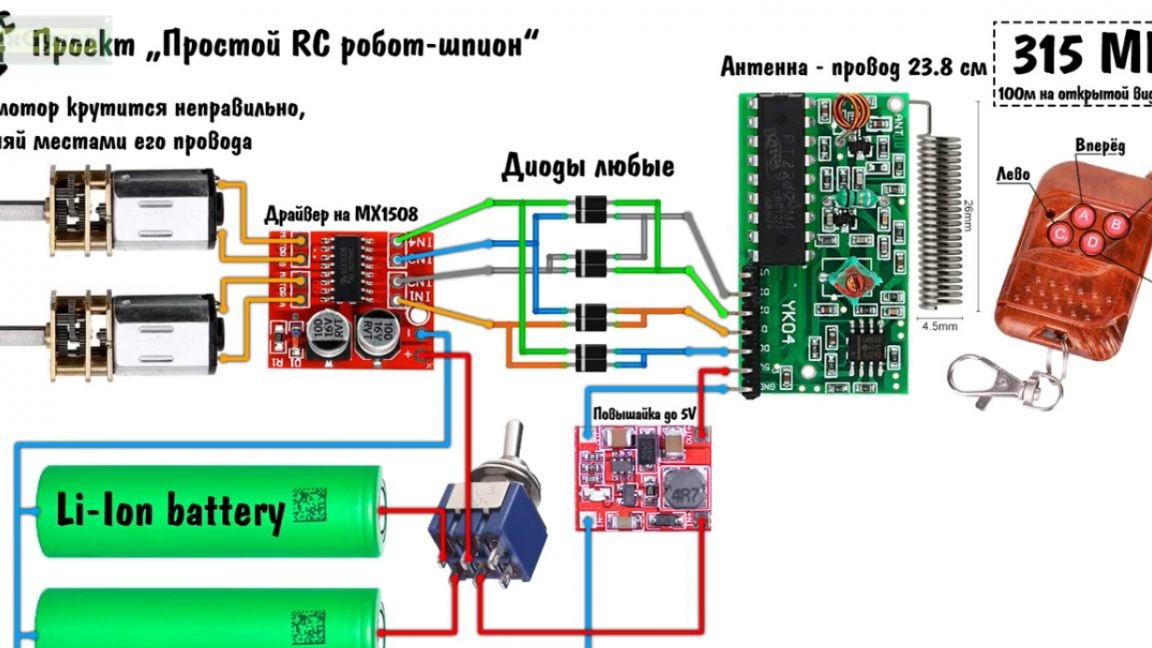
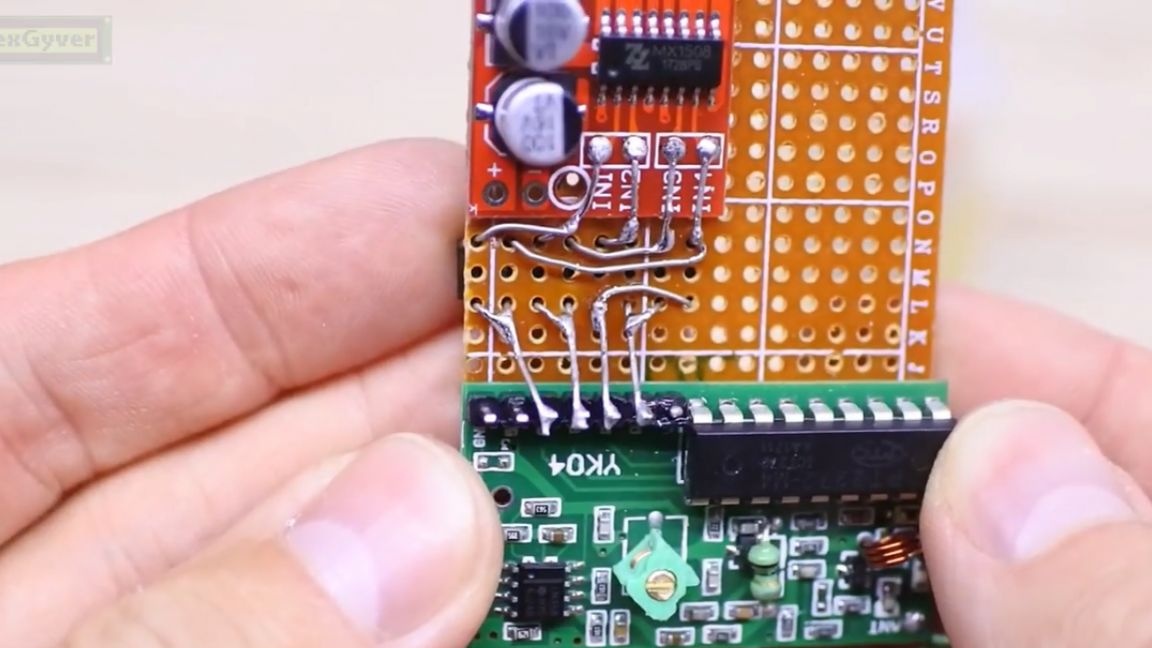
Pengarang produk buatan sendiri ini ialah AlexGyver. Jadi mari kita mulakan. Oleh itu, lihatlah modul pemancar 315 MHz seperti dalam bentuk empat butang jauh dan penerima dengan empat output logik untuk setiap butang kepadanya.
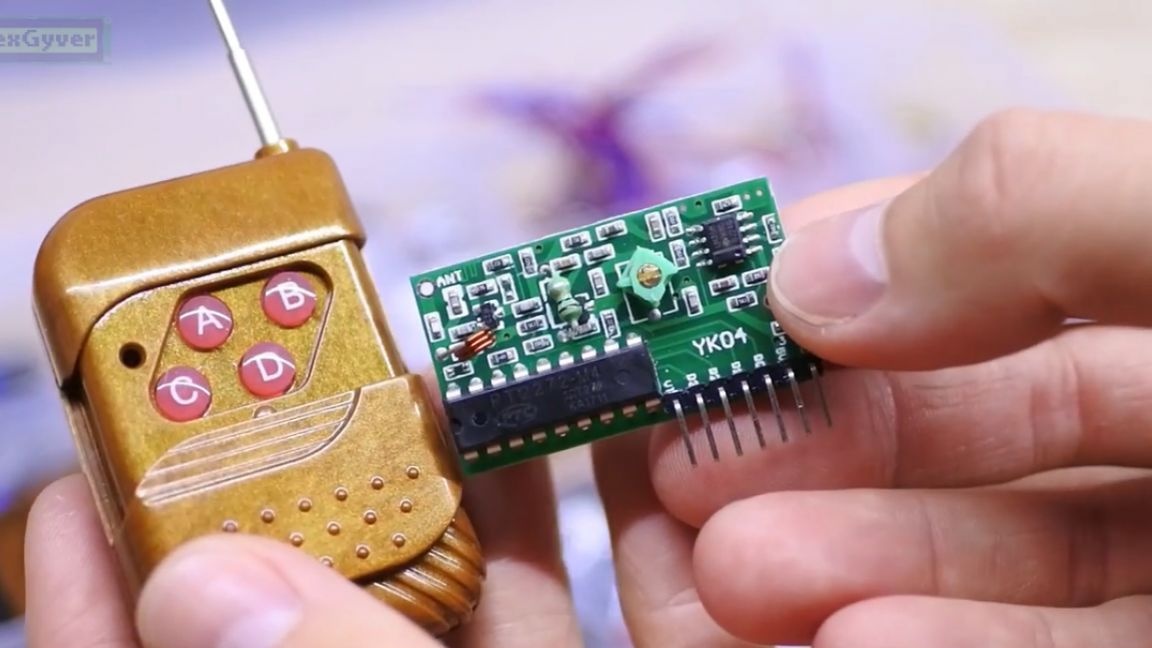

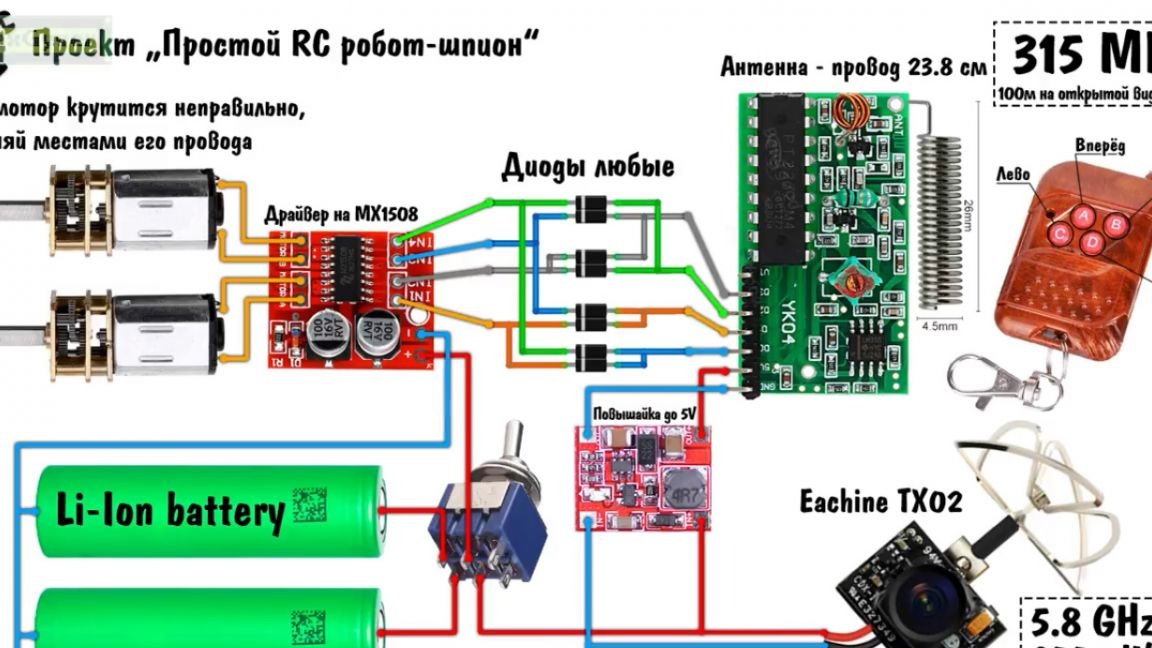
Ini semua berfungsi dengan cara yang sangat jelas: mereka menekan butang 5 volt pada output yang sama. Ada potensi yang baik arduino projek. Terdapat juga pemandu untuk 2 motor pada cip mx1508.
Komponen untuk robot (pautan ke Aliexpress):
FPV:

Ini adalah analog hampir moden dengan lame lama lama. Dengannya, segala-galanya juga sangat mudah, kita menyambung 2 motor dan, dengan isyarat logik, putarnya dalam satu atau arah yang lain.
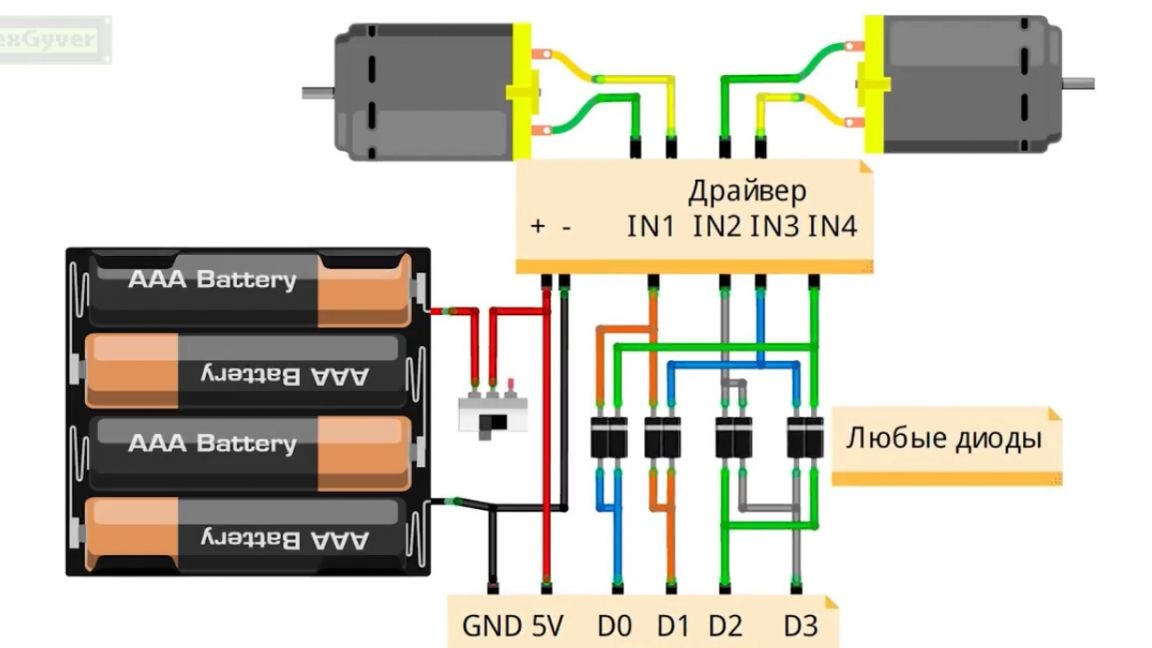
Dan tidak ada yang lebih mudah daripada menyambung 2 modul ini dan menguasai mesin pada skim tangki. Ia tetap hanya untuk mengetahui cara menyambungkan modul penerima pemandu motor supaya enjin menghidupkan seperti yang kita perlukan, iaitu, logik penghantaran isyarat mestilah sesuatu seperti ini, sepadan dengan butang pada alat kawalan jauh.
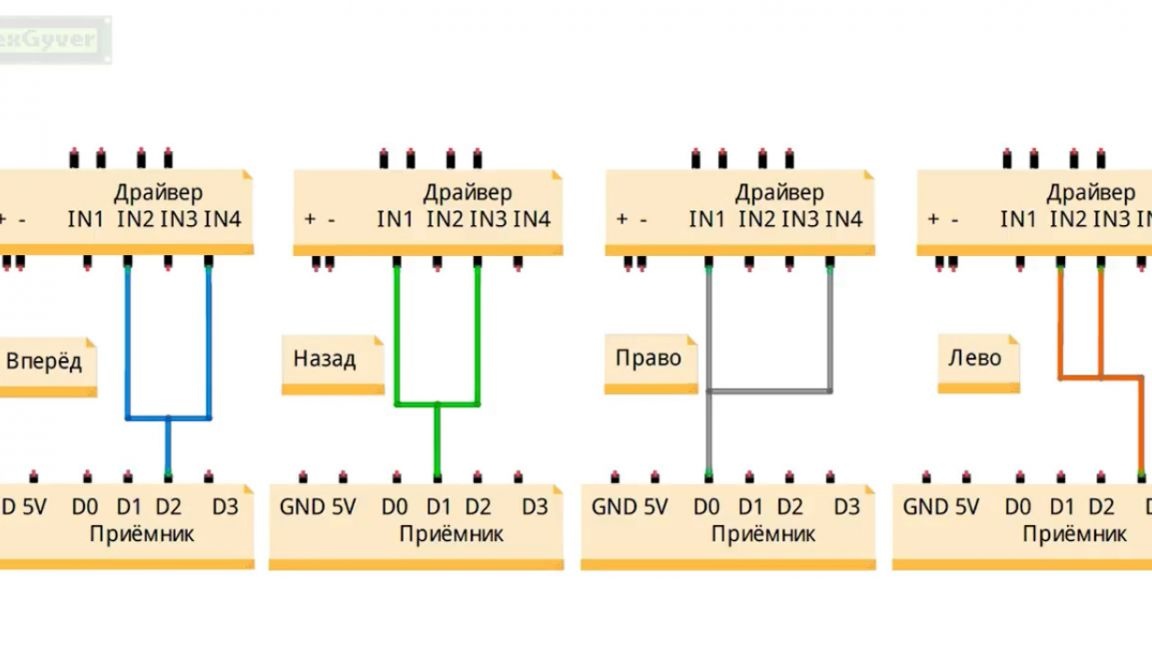
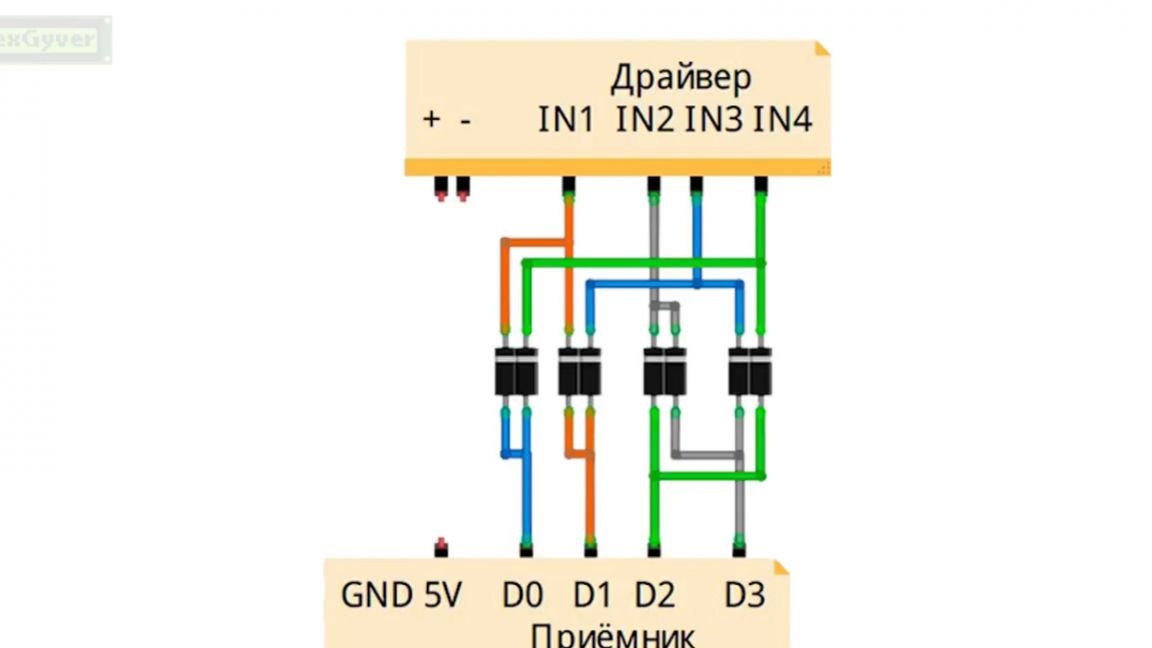
Litar untuk saluran secara berasingan berfungsi dengan baik, tetapi saya mahu semuanya sekaligus. Adalah jelas bahawa ia adalah mustahil untuk mengambil dan menyambung semua wayar seperti itu, kerana saluran kawalan akan mengganggu satu sama lain dan motor hanya akan tidak berputar, jika tidak ada yang lain membakar tentu saja. Kita perlu melindungi saluran kawalan dari pengaruh dan litar bersama. Dan kemudian diod biasa yang lulus semasa hanya dalam satu arah akan datang untuk menyelamatkan.

Dan dalam bentuk ini, litar boleh digabungkan. Kami mengoptimalkannya sedikit untuk kekompakan dan penglihatan yang lebih baik, baiklah, bagi kami untuk menyambung kuasa, contohnya, dari bateri jari dan motor, kami juga boleh menambah suis, tetapi malangnya semuanya tidak begitu mudah.
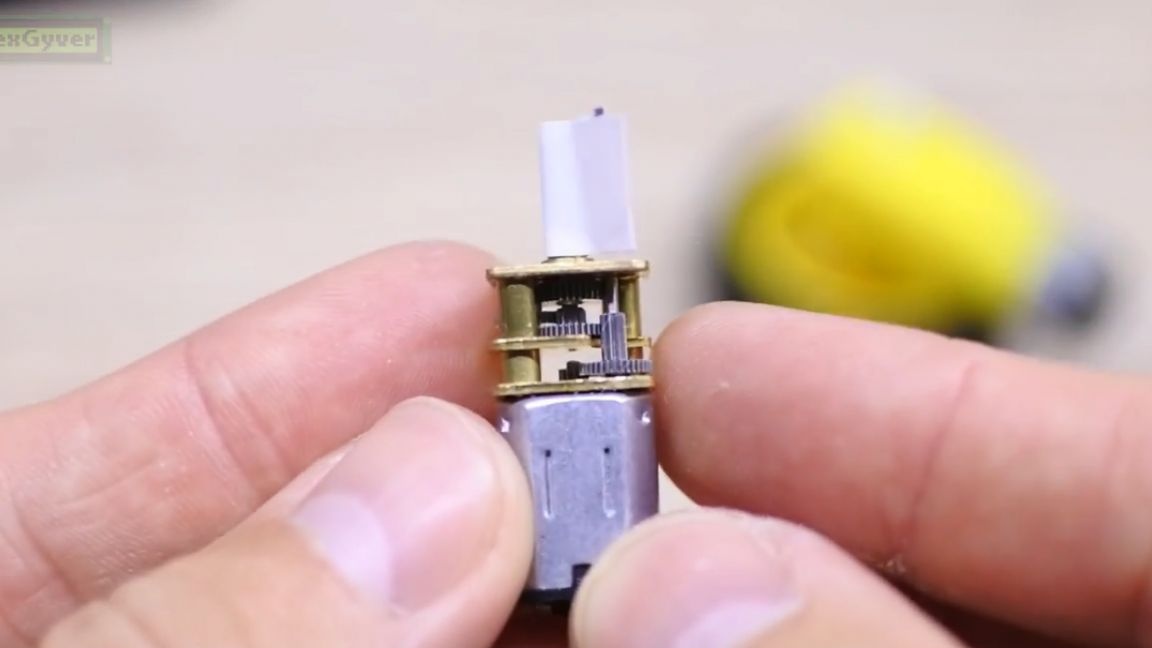
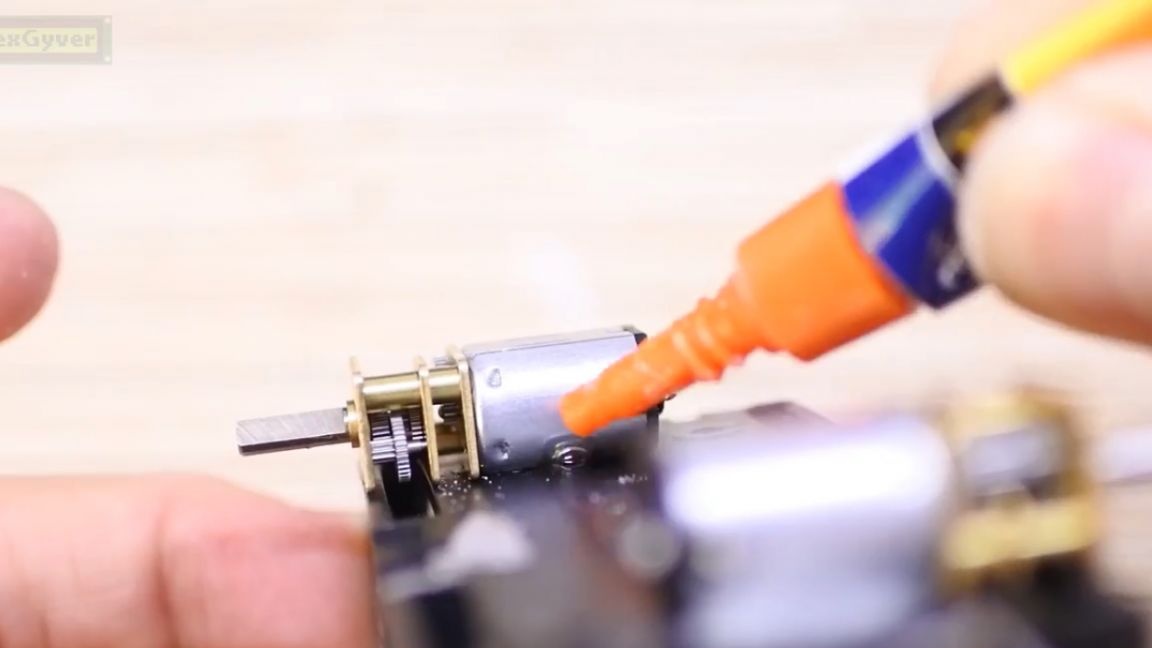
Orang Cina mempunyai motor gear siap pakai yang indah untuk robot buatan sendiri. Mereka dijual serta-merta dengan roda. Dan terdapat alat penggunting mikro, kita akan menggunakannya kerana kita mahu membuat robot pengintip mini.

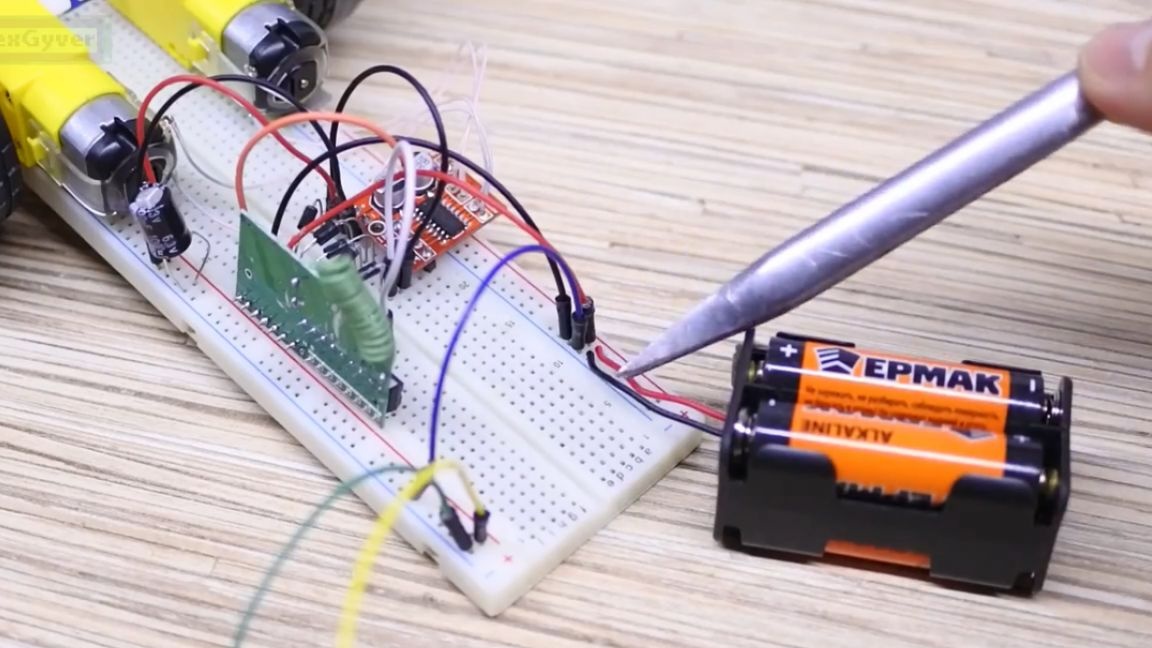
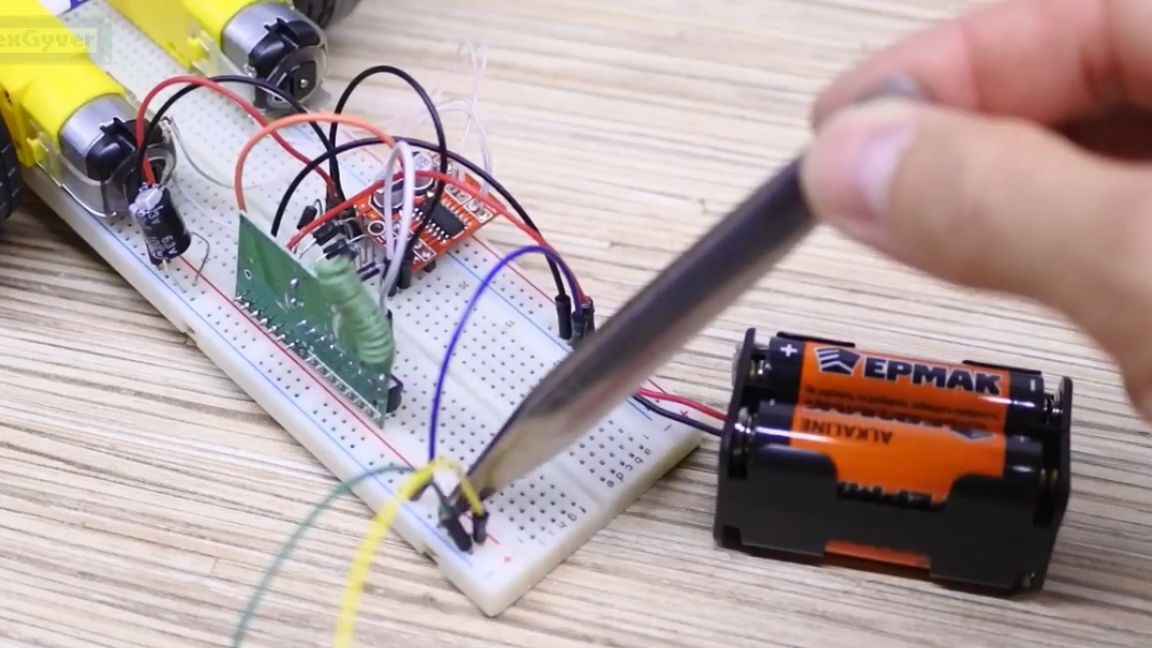
Tetapi untuk ujian pertama, mari kita motor solder besar, dan untuk ujian kita akan memasang litar pada papan roti. Kami mengambil dioda dan menyambung semuanya mengikut skema.
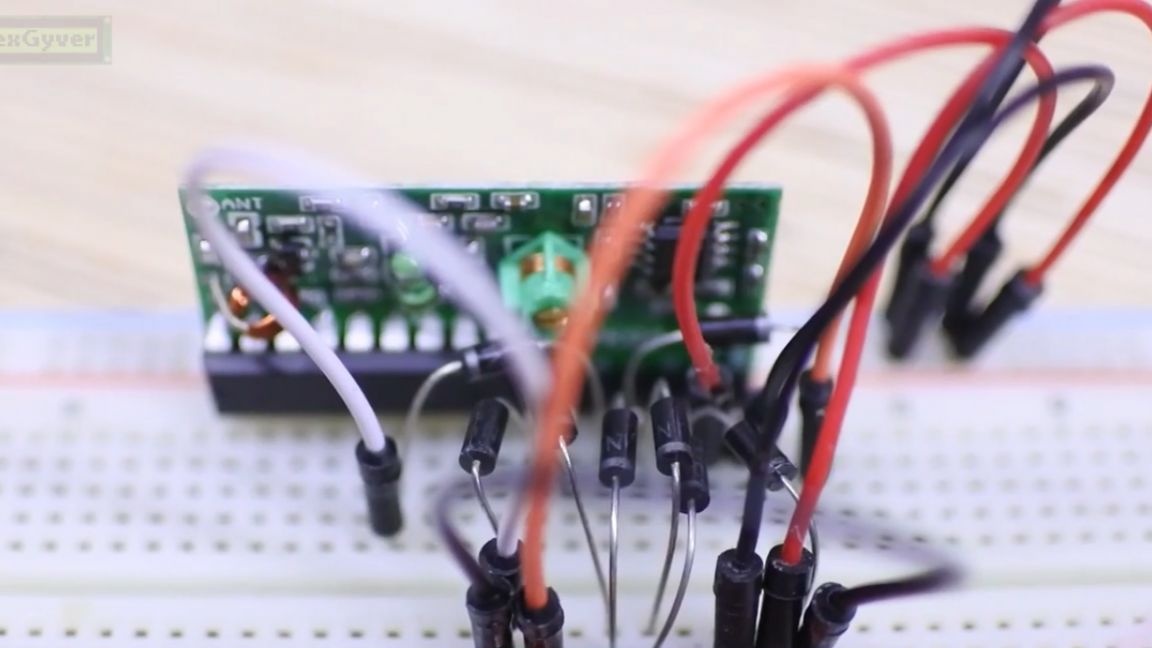
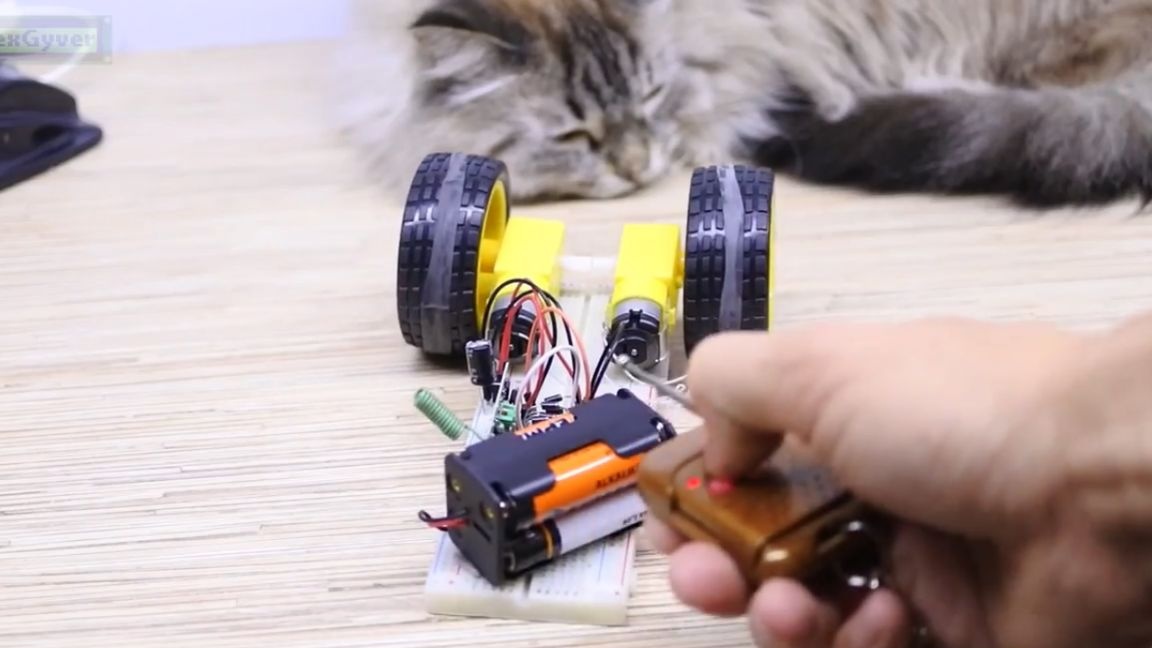
Nah, sesuatu seperti itu. Kami menetapkan roda motor untuk pita dua sisi pada prinsip dan ia akan melakukan ini - ini adalah susun atur yang sama.
Kami akan makan dari 4 bateri jari. Segera tarik roda tayar anti-slip dari cincin dari ruang basikal. Mari pergi!

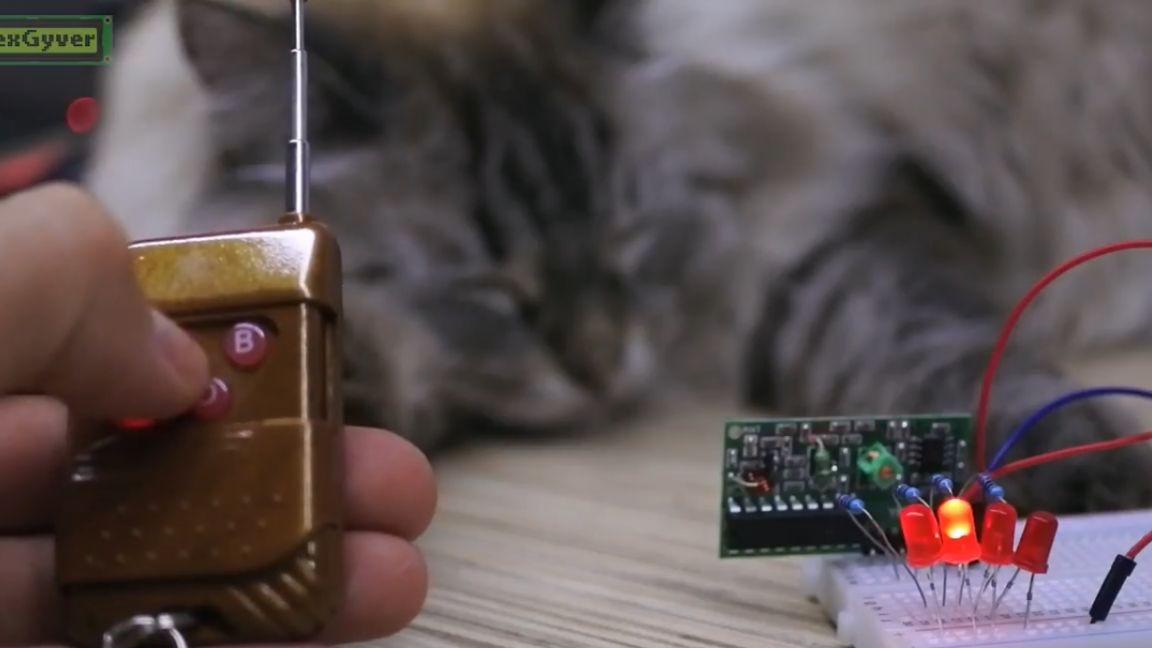
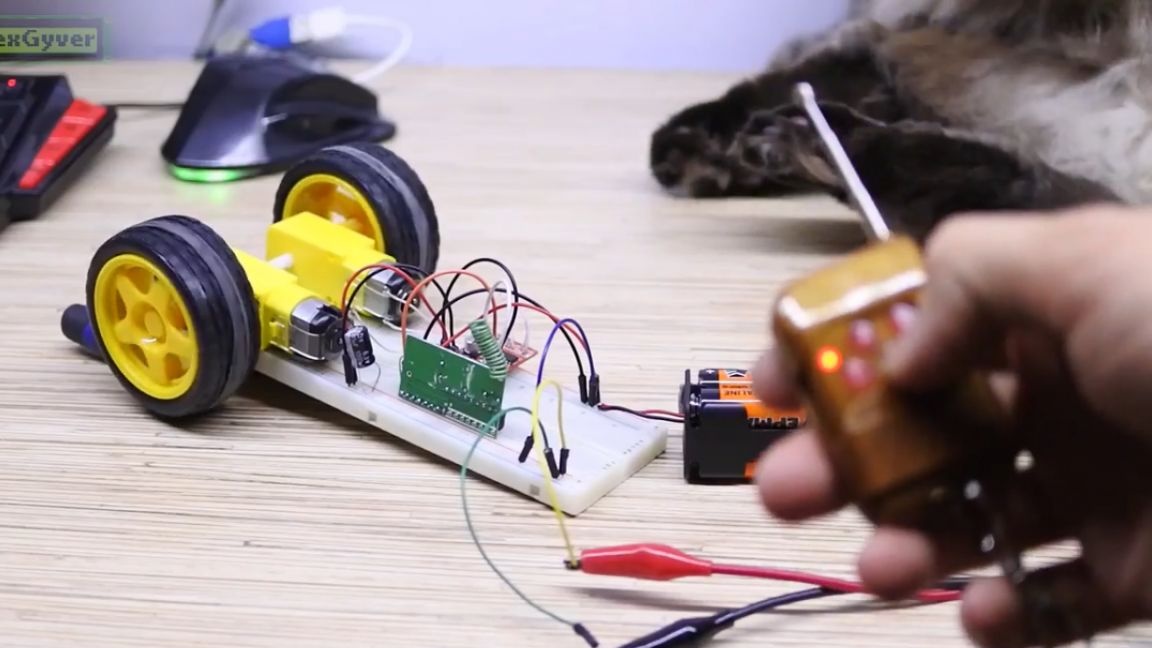
Tetapi ski tidak naik.Semasa memegang butang, mesin bergerak dengan cepat, dan pada ujian dengan LED kita melihat bahawa isyarat adalah tetap tanpa jerking, oleh itu, dengan logik, mesin perlu pergi tepat ketika butang ditekan, tetapi untuk sebab tertentu ini tidak berlaku. Baiklah. Untuk memulakan, orang Cina mematerkan antena ke pemancar dan tidak menyolder kepada penerima. Tidak, pada hakikatnya, antena adalah dalam bentuk trek di papan:
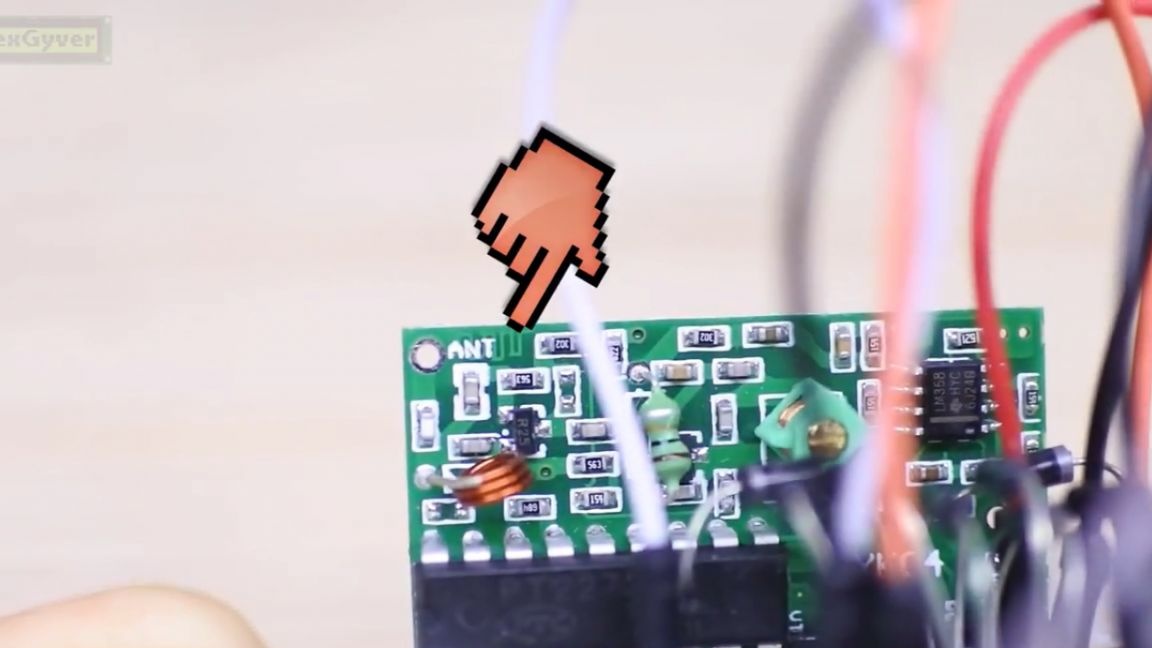
Tetapi antena adalah kes apabila ukurannya penting. Mari kita buat antena kita. Untuk melakukan ini, anda memerlukan wayar biasa, contohnya, dari kabel Internet.

Panjang antena biasanya diambil sama dengan 1/4 daripada panjang gelombang, yang dikenali sebagai alat pengukur gelombang suku. Kekerapan radio modul ialah 315 MHz, kami menerjemahkan kekerapan ke dalam gelombang panjang mengikut formula sekolah melalui kelajuan cahaya, bahagikan dengan 4 dan ternyata 23 dengan ekor sentimeter.
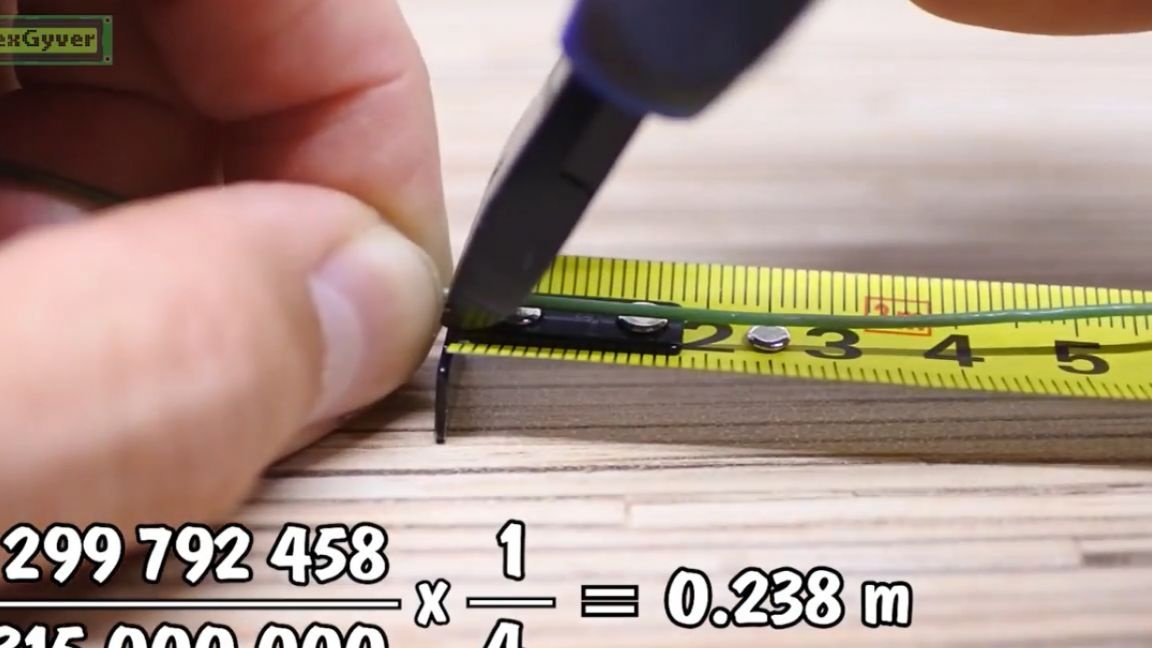
Di sini, tablet dari Internet untuk frekuensi yang berbeza.
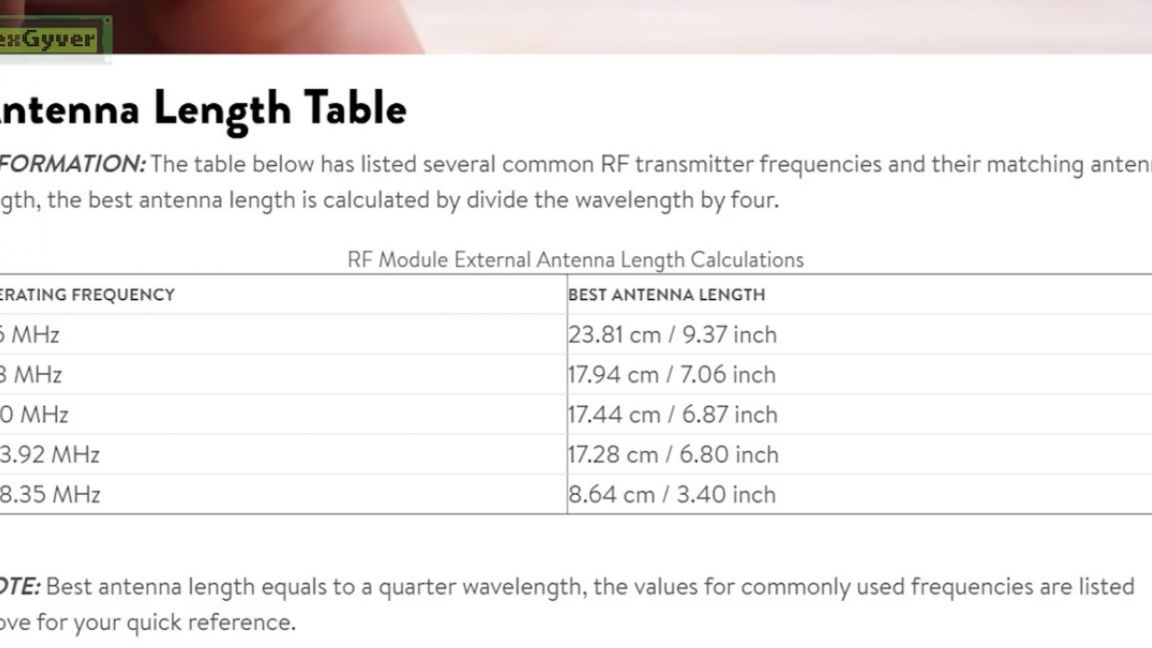
Seperti yang anda dapat lihat, kami melakukan semua yang betul. Dengan antena seperti ini, kita robot itu Dia tidak akan menjadi mata-mata, kerana dia akan melekat sekeping kawat yang terlalu panjang.

Antena boleh diputar ke dalam lingkaran. Berdasarkan foto ini dari Internet, anda boleh angin dengan 4mm.
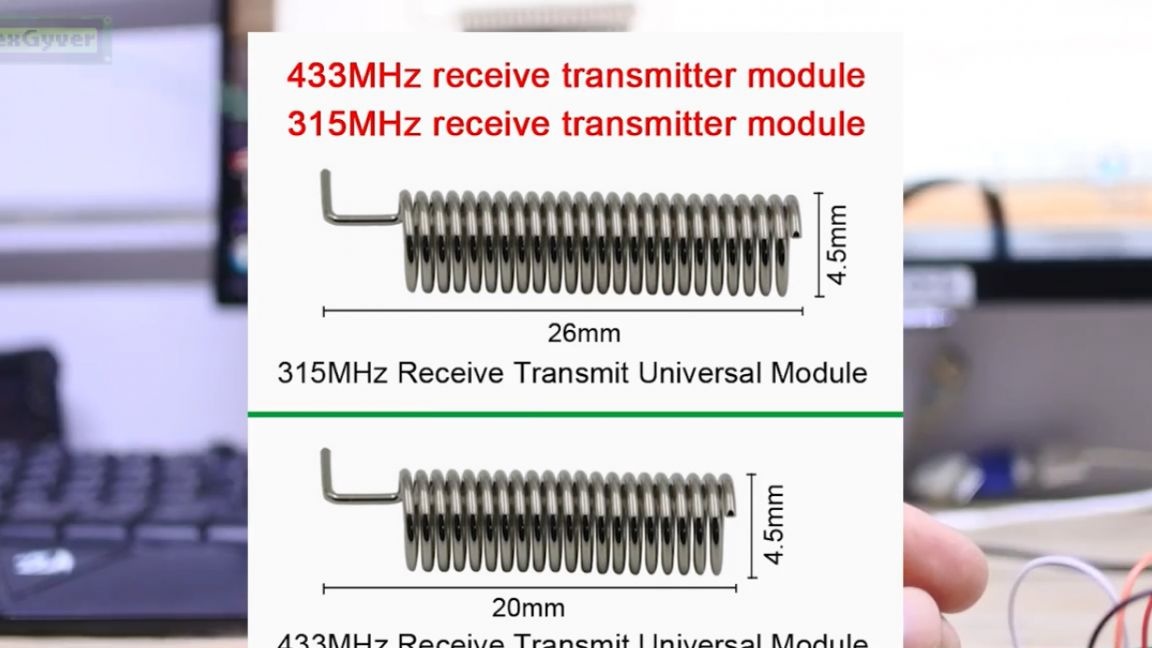
Ambil gerudi diameter yang sesuai dan bungkus antena kami di atasnya, dan kemudian solder ke papan.
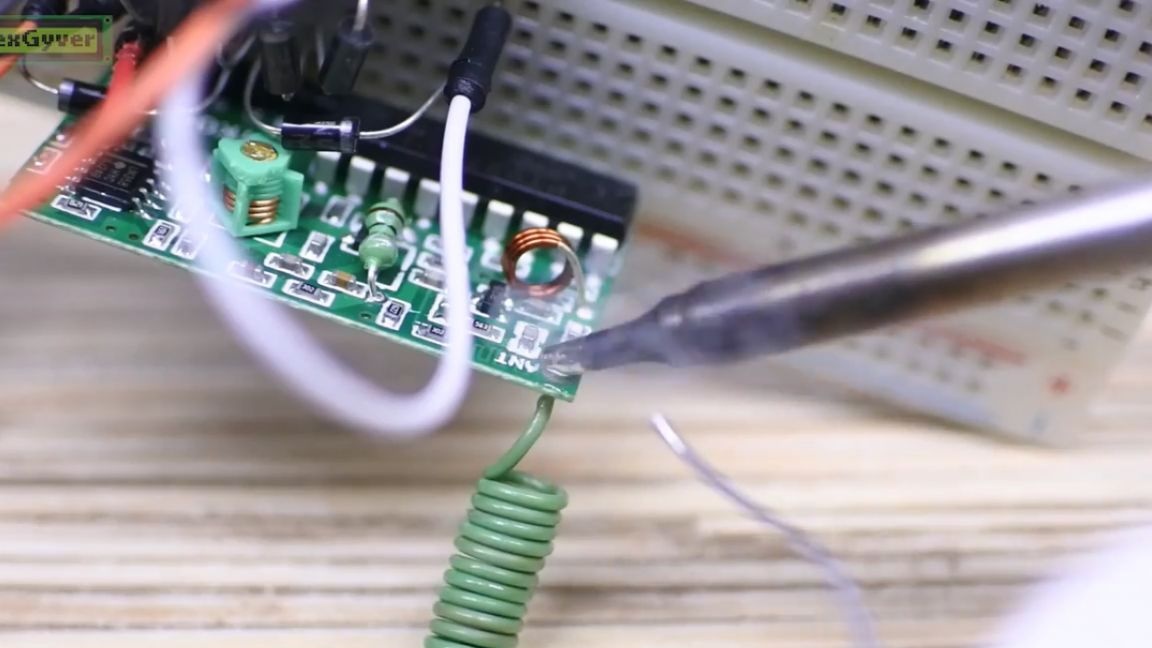
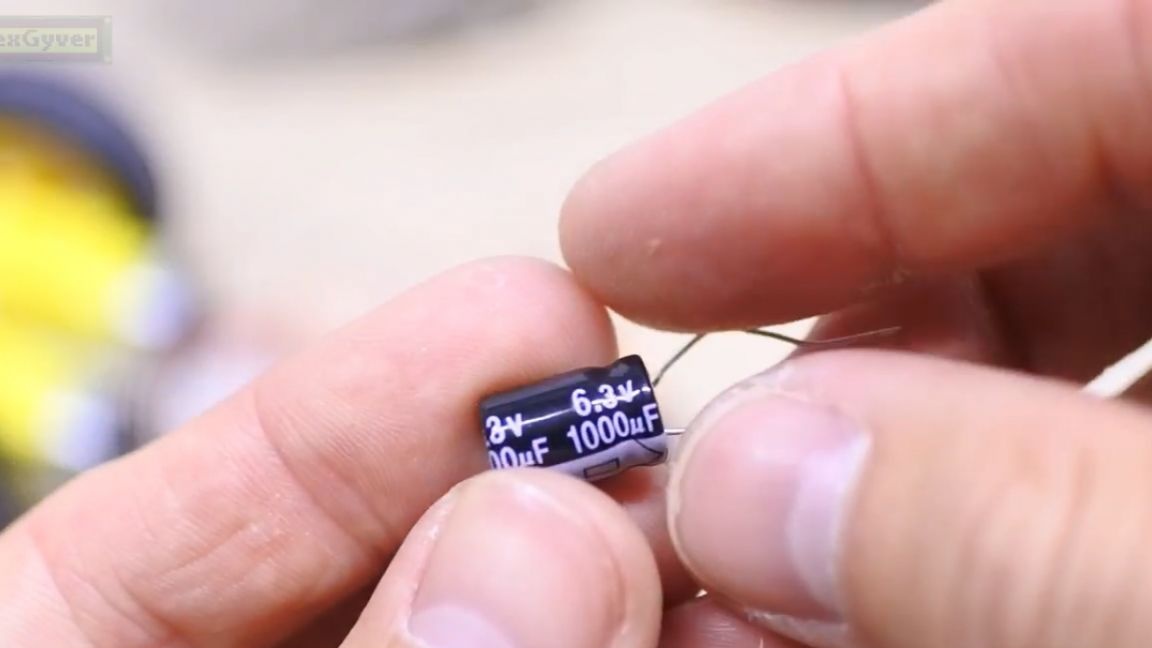
Untuk mengatasi arus permulaan yang tinggi, kapasitor akan membantu kami selari dengan bekalan kuasa.
Kami semak.
Dekat dengan antena, litar berfungsi dengan stabil. Mungkin, masalah masih dalam bekalan kuasa, terdapat gangguan dari motor, kerana dengan bekalan kuasa berasingan motor dan penerima, litar berfungsi seperti yang dimaksudkan.
Tambah elektrolitik dan kapasitor seramik untuk melancarkan kejutan bermula.
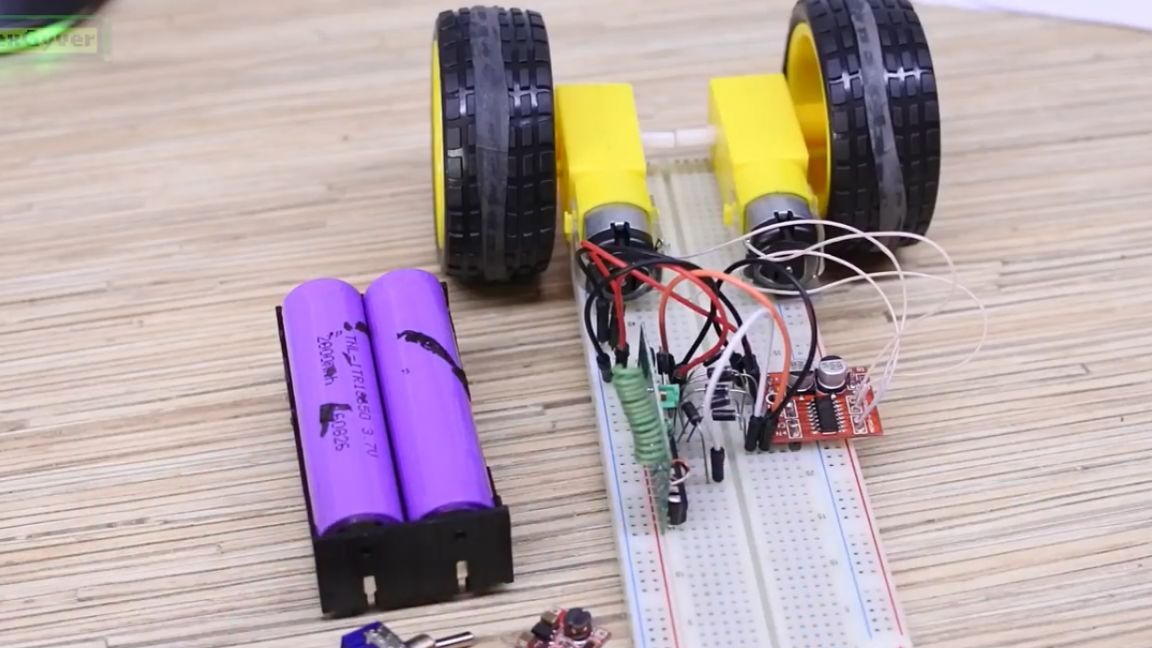
Tetapi masih, tiada apa yang berlaku. Kami akan melakukan makanan berasingan. Satu bateri 18650 lithium dikuasakan oleh motor dan satu lagi dikuasakan oleh radio. Kami juga akan meletakkan penukar rangsangan sehingga 5V, kerana radio berfungsi dari 5V, bateri tidak berfungsi lagi. Untuk menghidupkan kuasa, ambil suis togol berganda.
Semua komponen ini dijual di Aliexpress. Kami dengan cepat membina semula litar dan menyemaknya untuk prestasi.



Dan sialan itu berfungsi. Perhatian anda dipersembahkan kepada mesin buatan rumah yang paling mudah dan murah dengan kawalan jauh. Mengenai kuasa modul radio, penulis masih meletakkan beberapa kapasitor. Ia berfungsi dengan sempurna.
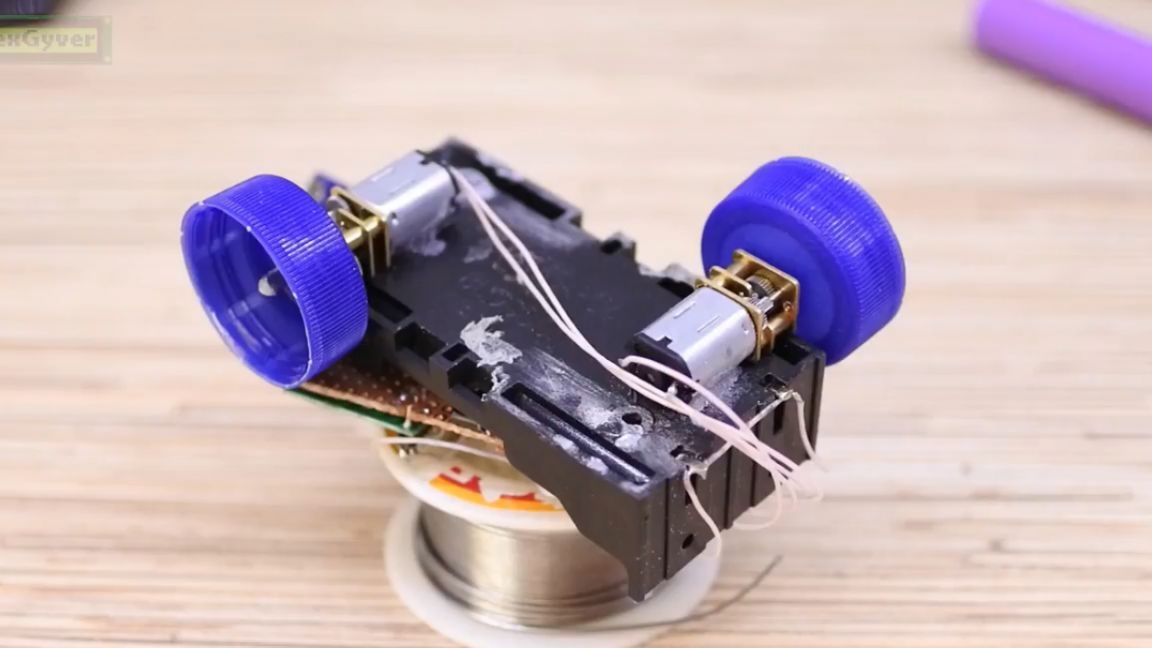
Robot kami akan dibina berdasarkan petak bateri dan motor kecil. Litar adalah sama seperti sebelumnya, tetapi untuk kemudahan kami akan memasangnya di papan roti.

Perhimpunan ini, pada dasarnya, mudah.
Seterusnya, ambil motor kecil dan gam ke petak bateri. Kami menyembuhkan superglue dengan soda baking biasa, ia terus mengeras dan membentuk polimer yang sangat tahan lama, yang dipasang sangat tegas.

Roda adalah penutup botol biasa.

Kami akan membuat roda memandu secara menyerong, ia akan menjadi lebih padat dan mesin akan menjadi lebih baik, tetapi mengatasi halangan yang lebih buruk.
Kami juga memerlukan 2 lagi roda yang akan berputar. Kuku mereka dalam lengan dari pensil, sesuai dengan saiznya. Paksi akan dari skru m3, jadi kita gerudi lubang 3mm, memasang dan gam pada superglue.

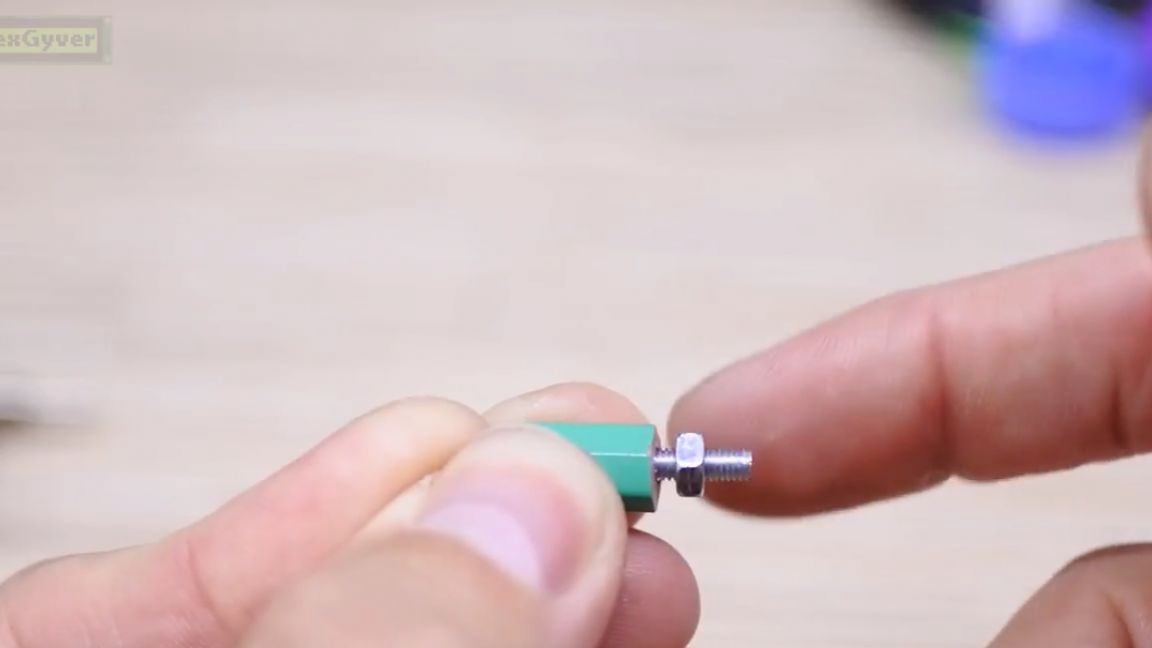
Pastikan untuk membuat tayar dari kamera basikal jika tidak ia tidak akan pergi. Kami meletakkan getah hanya pada roda pemacu sebaliknya, sekali lagi, ia tidak boleh pergi.

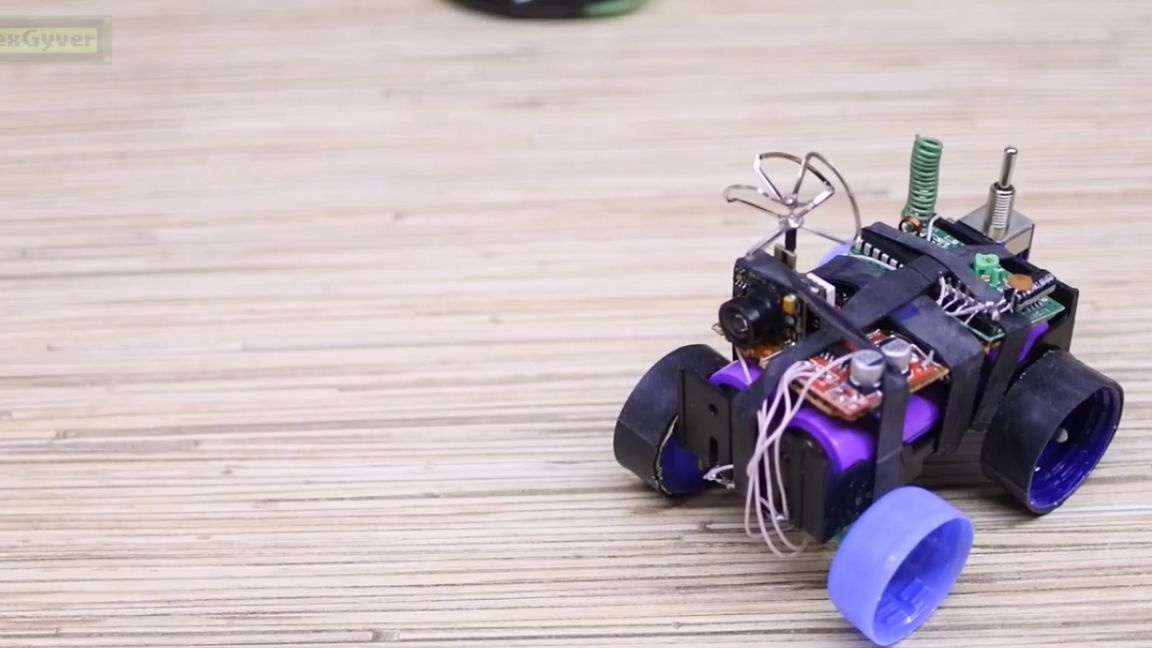
Nah, bagaimana mesin pengintip mini kami tanpa kamera mini. Penulis mengambil kamera mini untuk quadrocopter dan Eachine tx-02 3 dalam 1 (kamera + pemancar + antena).
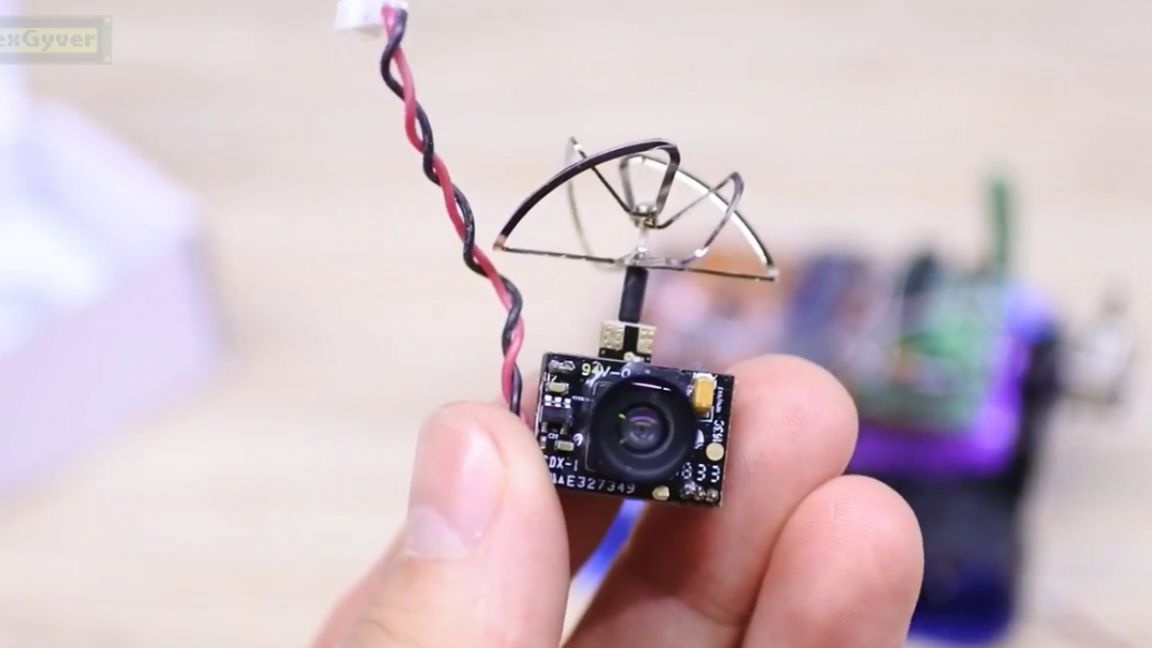
Kamera ini dikuasakan oleh voltan 3 hingga 5V dan menghantar isyarat video pada kekerapan 5.8 GHz. Kami kuasa dari bateri yang mana penerima kawalan jauh dikuasakan.
Oleh itu, motor tidak akan mengganggu isyarat video. Cabut pita dua sisi dan jalur getah.

Anda boleh menerima video pada beberapa peranti Cina yang berbeza. Terdapat paparan yang hebat dengan penerima terbina dalam dan bateri terbina dalam, anda juga boleh memasukkan kad memori ke dalamnya dan merakamnya apa yang diperlukan oleh kamera.
Pengarang, malangnya, tidak mempunyai satu, tetapi perkara itu benar-benar keren dan selesa. Pilihan kedua adalah sedikit lebih kecil, tetapi hanya apa yang anda perlukan untuk kereta pengintip kami.


Ini adalah paparan kecil dengan penerima dan bateri, dan bukan hanya paparan, tetapi jam tangan dengan paparan 2 inci. Jadual saluran pautan video dikodkan dalam empat huruf dan lapan digit.
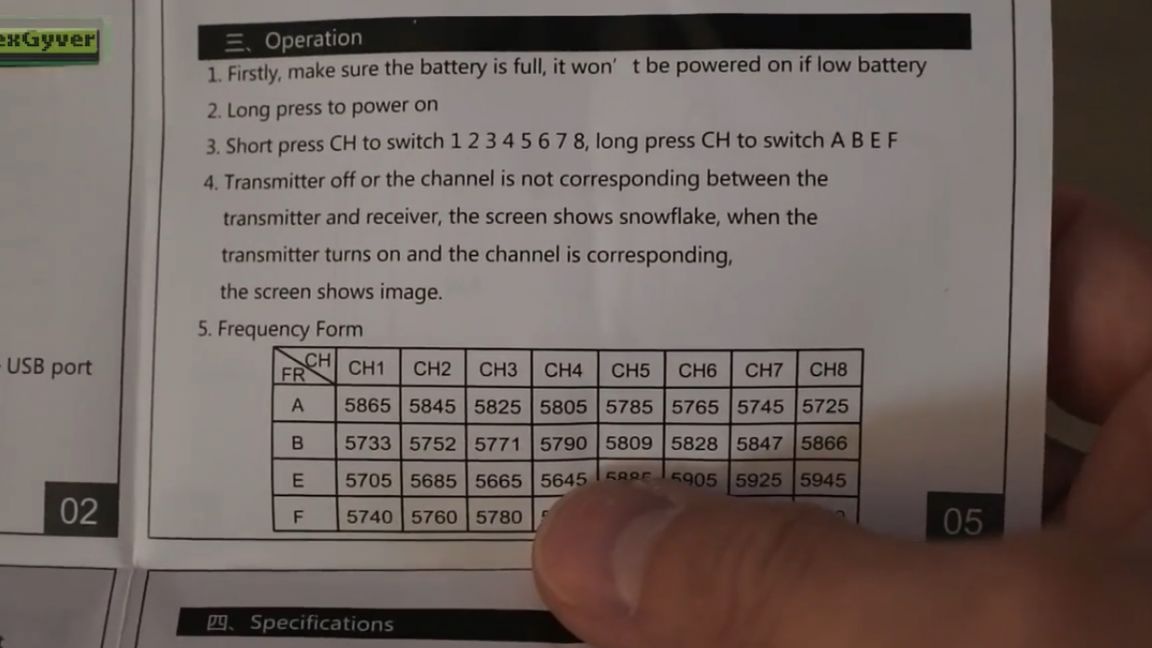
Saluran mesti sepadan pada pemancar dan penerima.Pada pemancar kita mempunyai saluran dengan nombor A8, anda boleh menukar butang.

Dan jam tangan itu mempunyai skala. Dengan mengklik dan menahan butang, anda boleh menetapkan nombor saluran A8.

Segala-galanya, ada kenalan. Anda boleh mula pengawasan.

Pilihan ketiga, pada dasarnya yang paling murah, adalah seperti penerima untuk telefon pintar, memuat turun program khas, buka, sambungkan, aktifkan, hidupkan kuasa pada pemancar video, tekan dan tahan butang pada penerima dan mulai imbasan jarak.


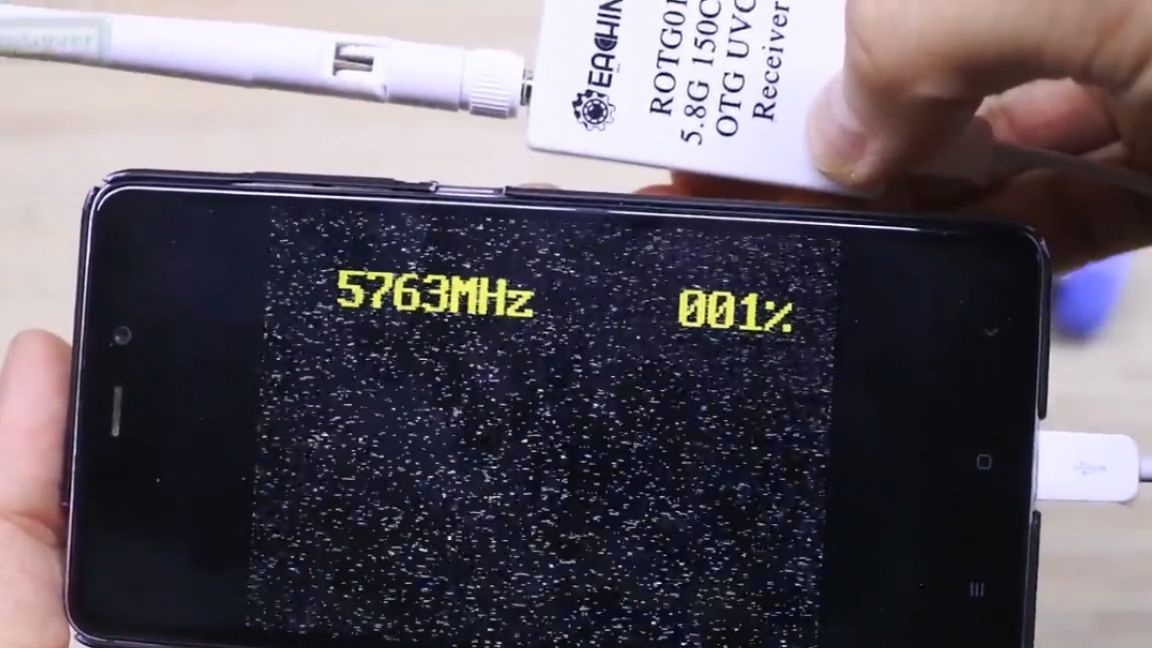
Selepas itu, frekuensi terbaik akan dipilih secara automatik dan anda boleh bekerja dengan sistem pengawasan video kami.



Perkara paling keren ialah anda boleh merakam video terus ke dalam memori telefon.

Itu sahaja untuk hari ini. Terima kasih atas perhatian anda. Lihat awak tidak lama lagi!
Video: