Gagasannya sangat mirip dengan kecoa sebenar. Apabila berjalan, ia bergerak sedikit melangkah dengan yakin ke hadapan. Lipas mempunyai sedikit bahagian kompleks dan sangat mudah untuk dihasilkan.
1.Video ujian
Video menunjukkan kecoa mekanikal dari sudut berbeza semasa operasi dan pergerakannya.
2. Ciri-ciri dan ciri-ciri.
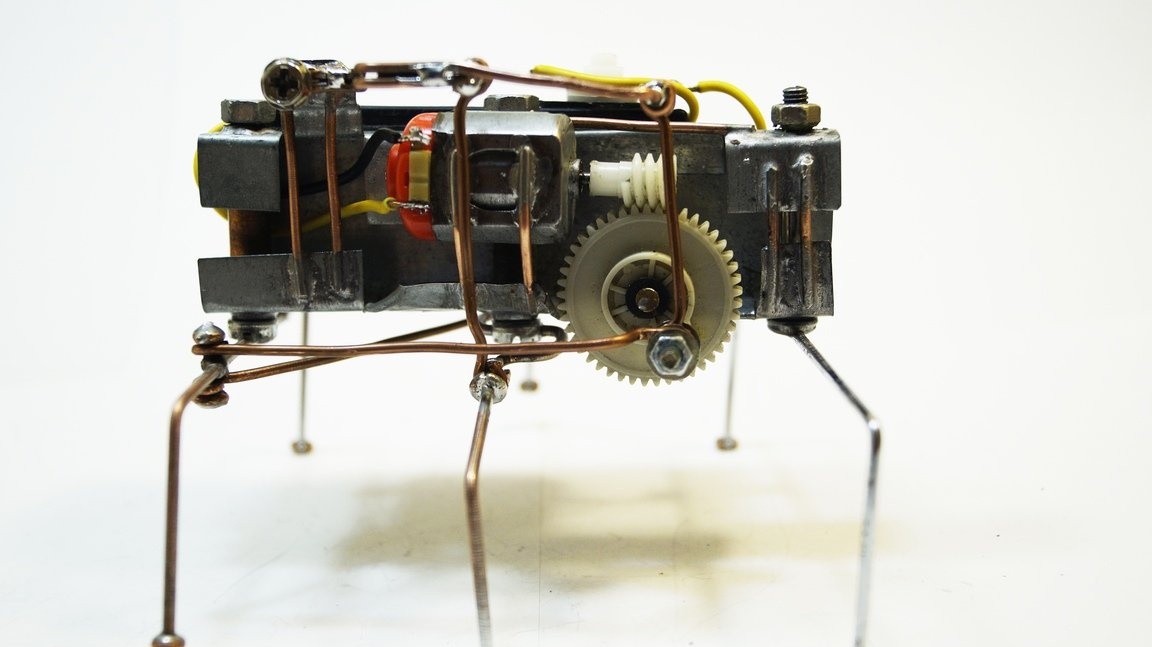
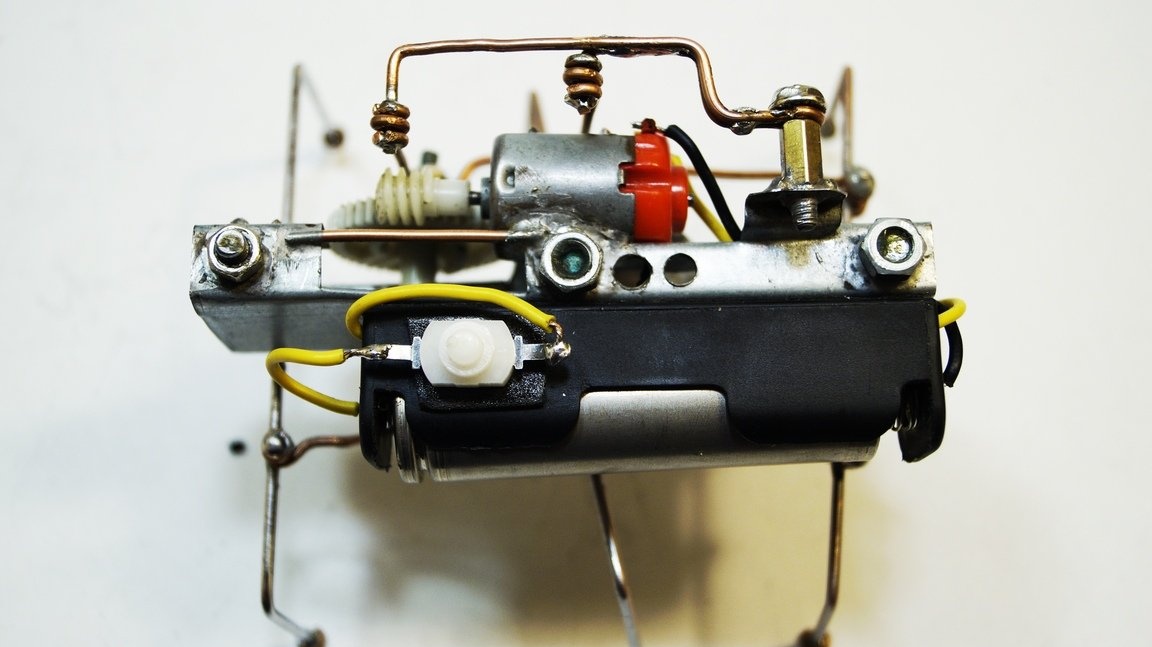
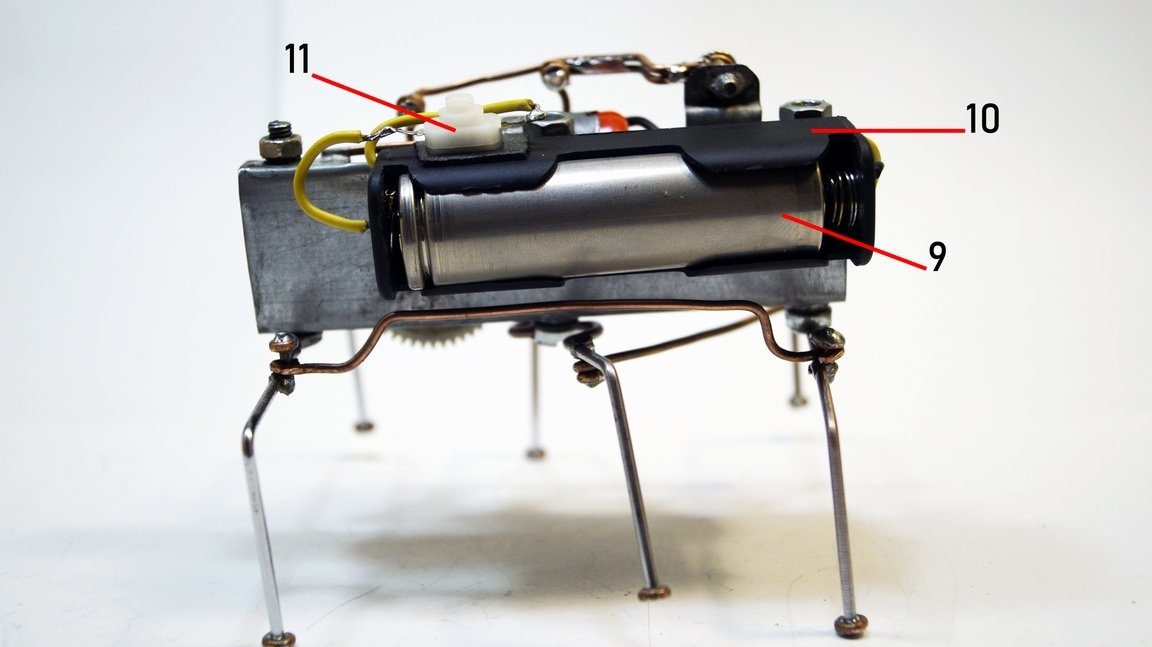
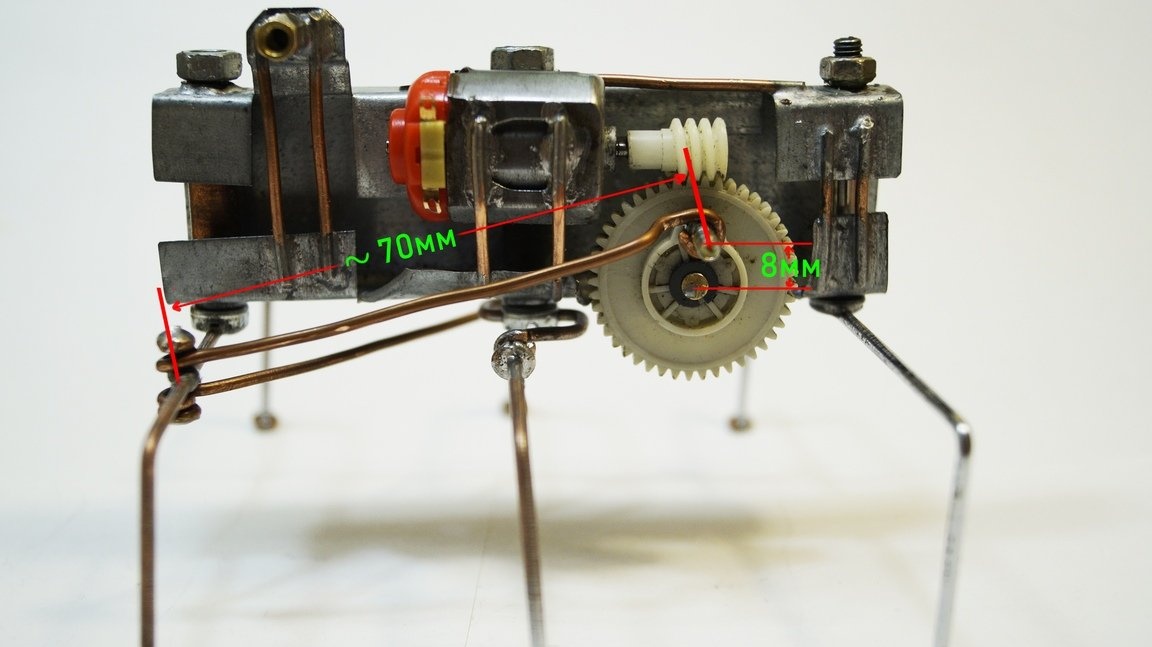
Pada gambar 1. Lipas mekanik ditunjukkan, pandangan sisi. Pada foto 2. Pandangan atas ditunjukkan.
Foto 1.
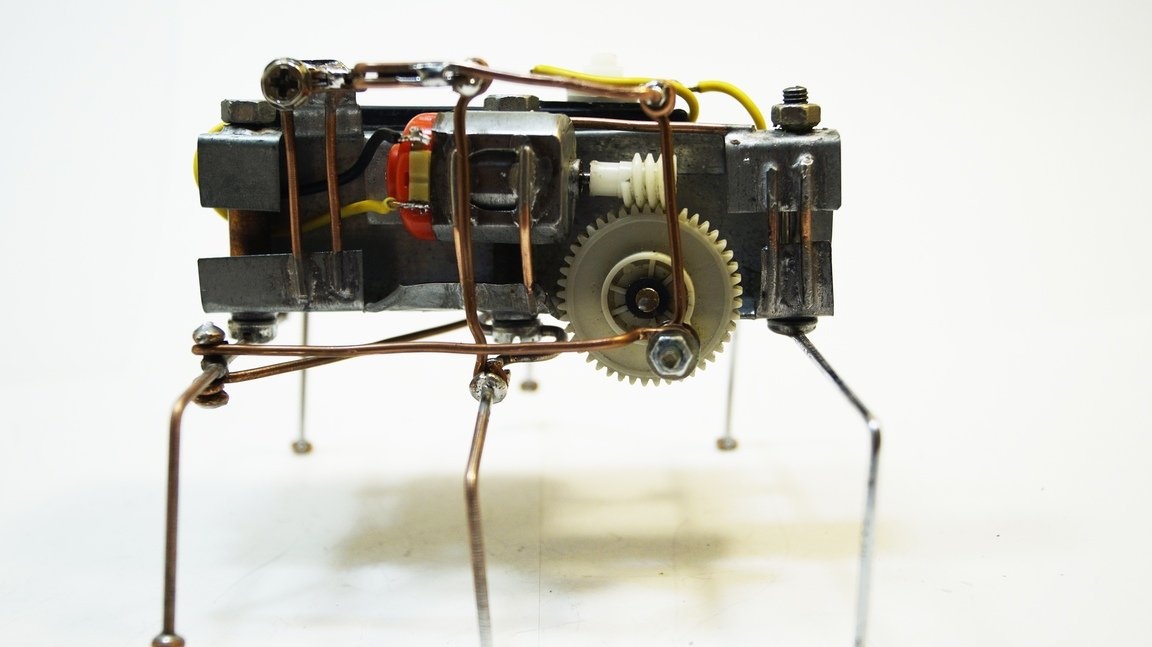
Foto 2.
DESIGN Sebagai bingkai, profil ppn-2 30X20 digunakan. Enjin dan sendi lain dipasang oleh pematerian. Cakar pada lipas dipasang dengan bolt M6. Butang kuasa dan petak bateri terpaku pada pita dua sisi. Sebagai tarikan untuk memandu kaki lipas, kabel tembaga dengan seksyen 2.5 mm digunakan.
MOTOR DAN CRANKS. Motor dan paksi engkol disolder ke bingkai pada POS-61, asid pematerian ZnCl (Zink klorida). Untuk meningkatkan tork dan mengurangkan saiz, gear cacing digunakan.
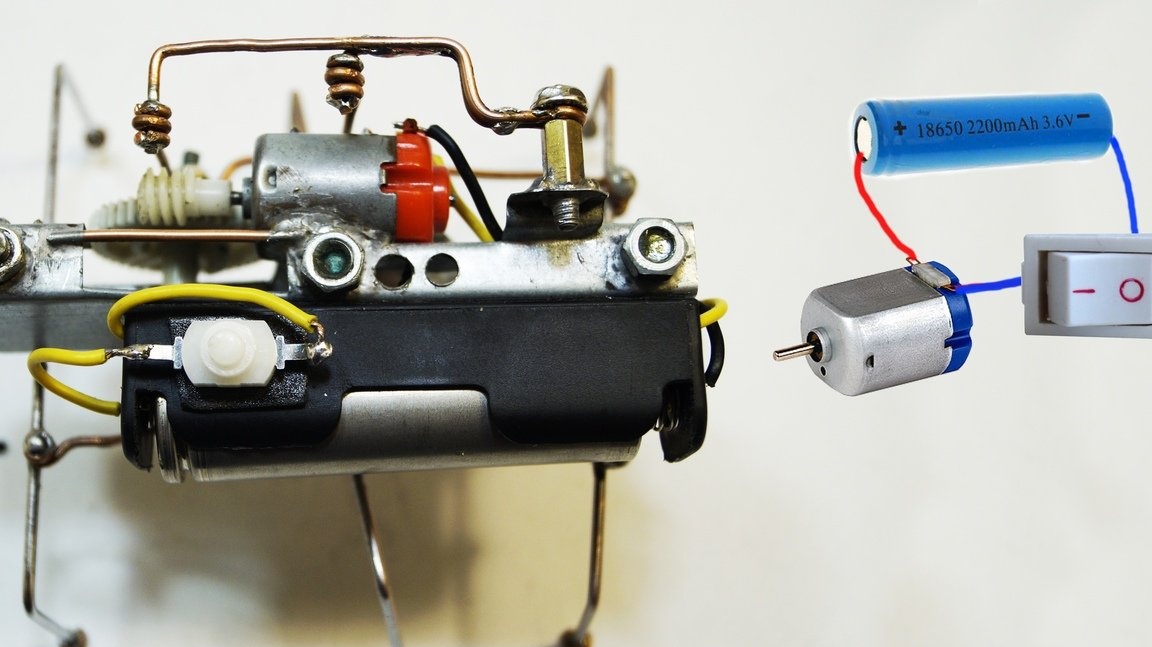
NUTRISI. Bateri 18650 digunakan sebagai kuasa robot. Sumber kuasa ialah 3.7V.
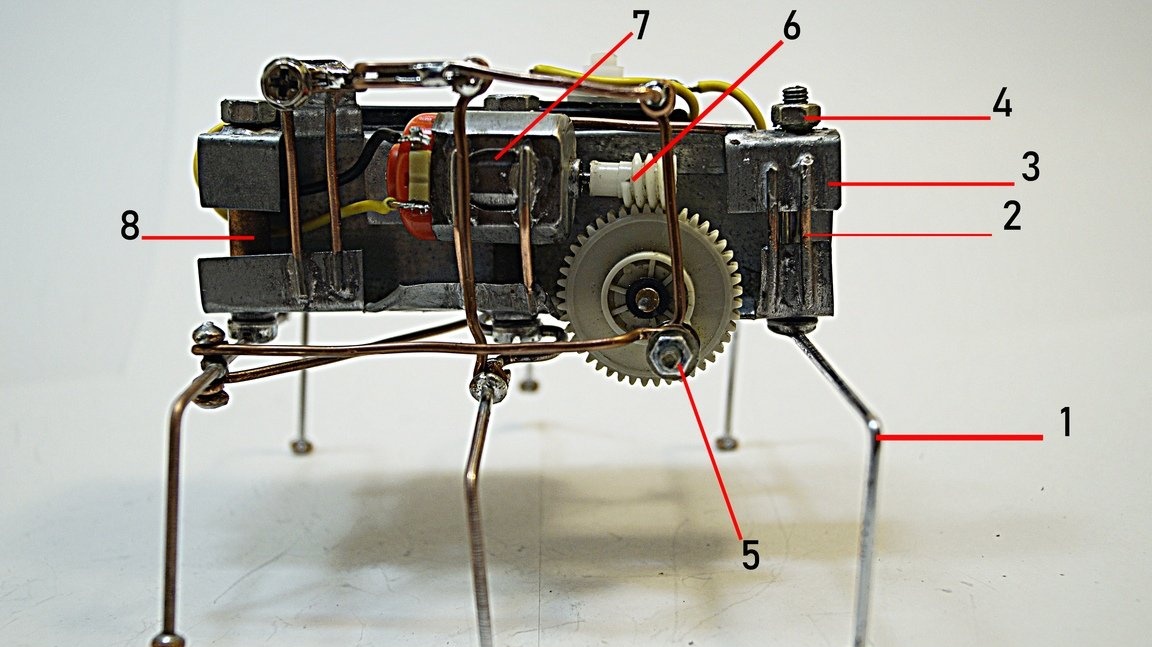
Reka bentuk ROBOT DESIGN
1. Cakar kecoa.
2. Pengkritik.
3. Bingkai.
4. Paksi corong kecoa.
5. Mekanisme engkol.
6. Pemacu cacing.
7. Motor elektrik F130 5 V.
8. Pek paku cakar lengan.
9. Jenis bateri 18650, 3.7 V.
10. Kompart bateri.
11. Butang kuasa.
3. Prinsip kerja.
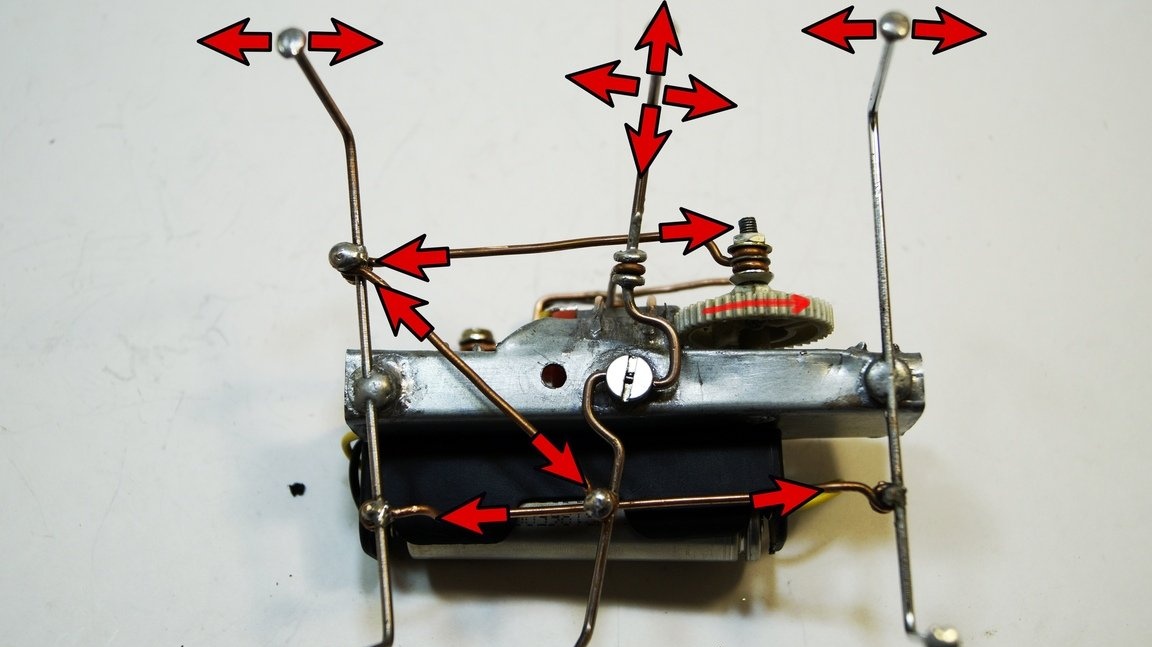
Pada gambar 3. 4. Prinsip kerja bahagian mekanikal lipas ditunjukkan. Perlu diingati bahawa kaki depan dan belakang robot bergerak secara mendatar, dan kaki tengah bergerak secara menegak dan mendatar.
Kuasa dibekalkan kepada motor elektrik melalui kunci, motor berputar mekanisme engkol. Engkol menggerakkan kaki depan melalui daya tarikan, masing-masing, dari kaki depan, tujahan menolak kaki belakang (mereka bergerak serentak). Pasangan tengah kaki dihubungkan dengan pasangan pertama, silang (mereka bergerak dalam antiphase).
Untuk memindahkan sepasang kaki tengah secara menegak, tuil dipasang di atas motor, yang bergerak dari mekanisme engkol.
Photo.3
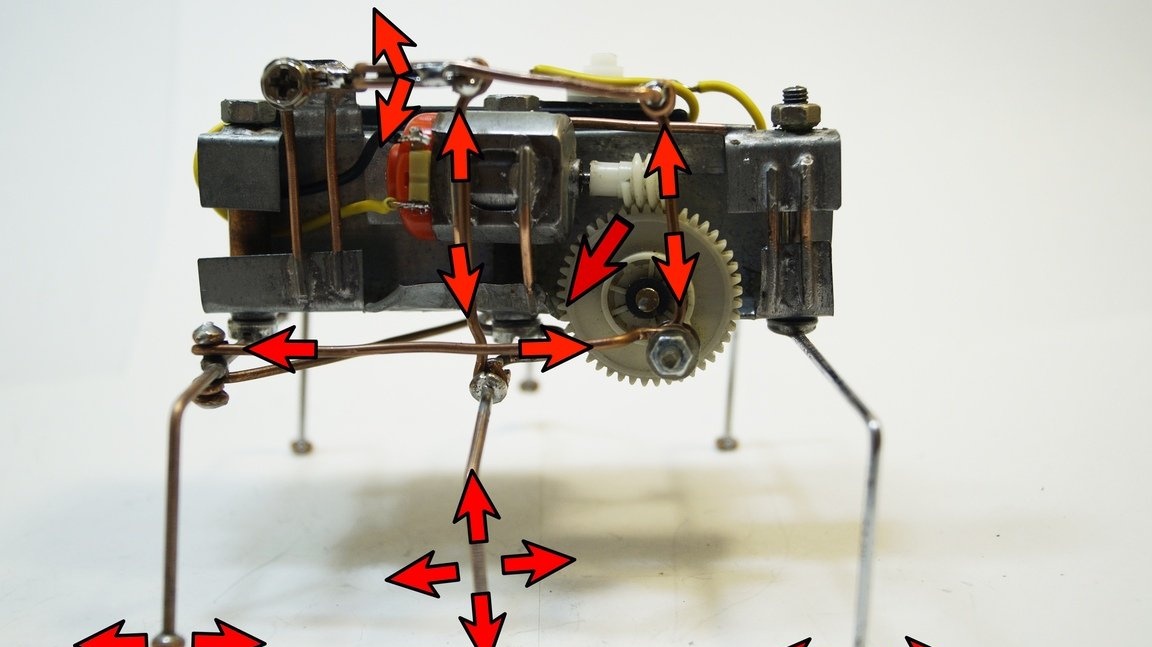
Photo.4
4. Bahan dan alat.
1. besi pematerian 50W.
2. Kompart bateri.
3.Prysoy POS-61.
4. Kawat tembaga dengan seksyen 2.5 mm.
5. ZnCl Asid Pematerian (Zink Klorida)
6. Motor elektrik F130 5V.
7. Gunting untuk logam.
8. Pemacu cacing.
9. Tang.
10. tiub keluli, diameter 80mm.
11. Bateri boleh dicas semula 18650.
12.Profile PPN-2 30X20.
Dan juga: (butang kuasa, pita bermuka dua, wayar pemasangan)

5. Arahan pemasangan.
1.Buat rangka kecoa.
Lukis markup pada profil seperti ditunjukkan dalam Gambar 5.
Foto 5.
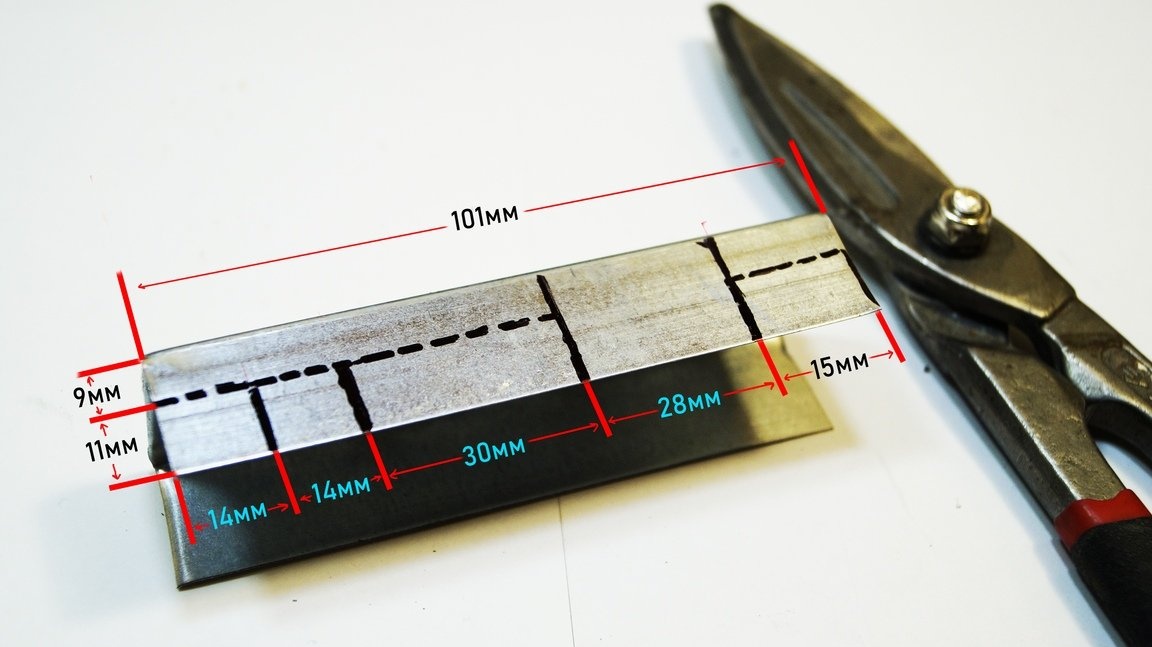
Menggunakan gunting untuk logam, kami memotong dan membengkokkan bahan kerja dengan tang seperti ditunjukkan dalam gambar 6. Tandakan bahagian bawah seperti yang ditunjukkan dalam foto 6. Bengkokkan profil dengan tang seperti dalam foto 7.
Foto 6.
Foto 7.
2. motor elektrik dan paksi engkol.
Langkah seterusnya adalah untuk menyolder motor elektrik ke bingkai. Motor sebelum pematerian perlu dibongkar. Kami membanjiri perumahan motor dan bingkai dengan besi penyeterika Foto 8.
Kami menyembur badan motor elektrik dan bingkai bersama-sama, memanaskan bahagian dengan baik dengan besi pematerian, menekan mereka ke satu sama lain Photo 9. !!! BE KEPERCAYAAN, DETAIL HEAT MUCH HEATED !!!
Foto 9.
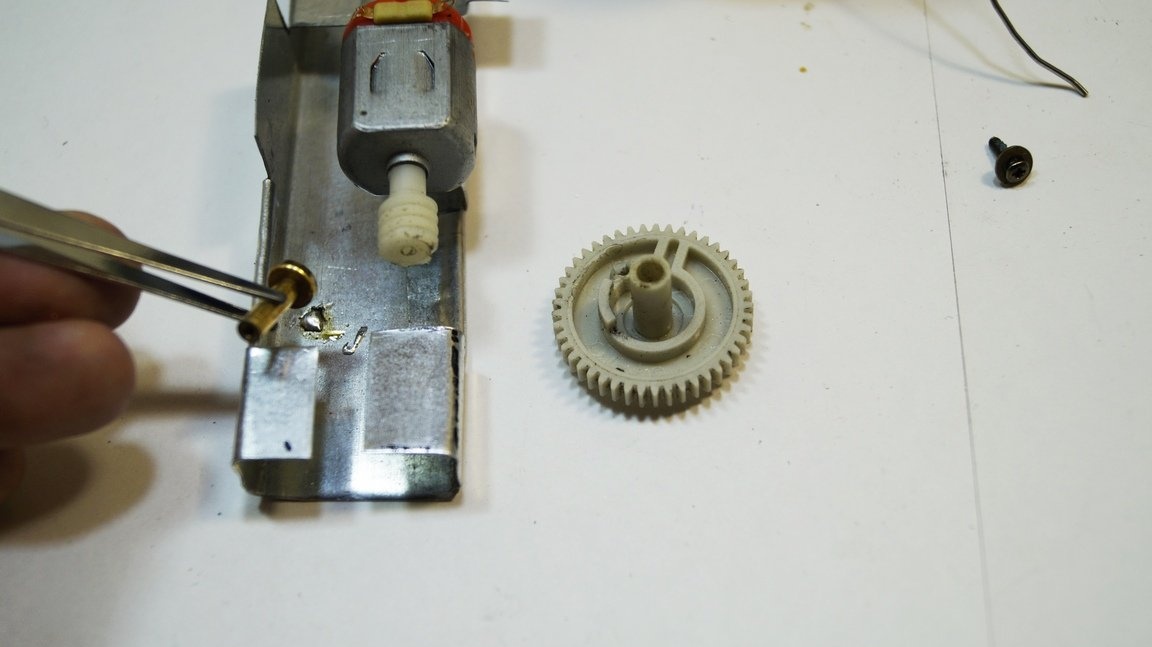
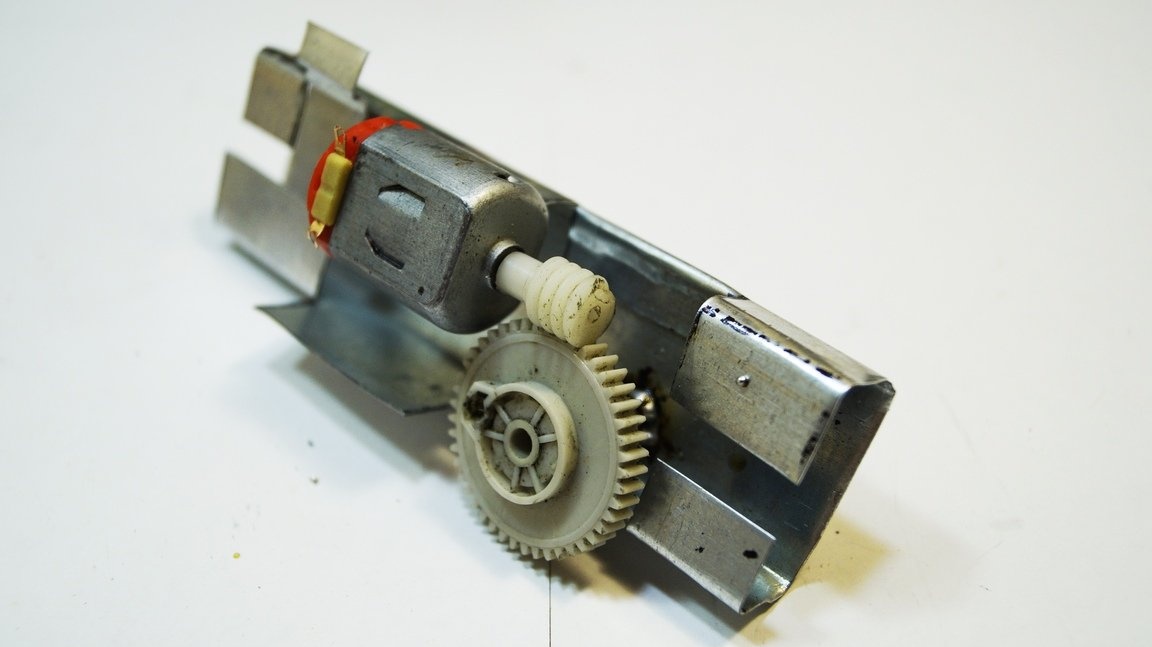
Meletakkan motor elektrik kembali. Kami pateri paksi engkol di tempat, ini dilakukan secara eksperimen. Gear cacing perlu dipasangkan dengan baik, gear tidak boleh diputar. Gambar 10.11.
3. Lubang untuk kaki lipas.
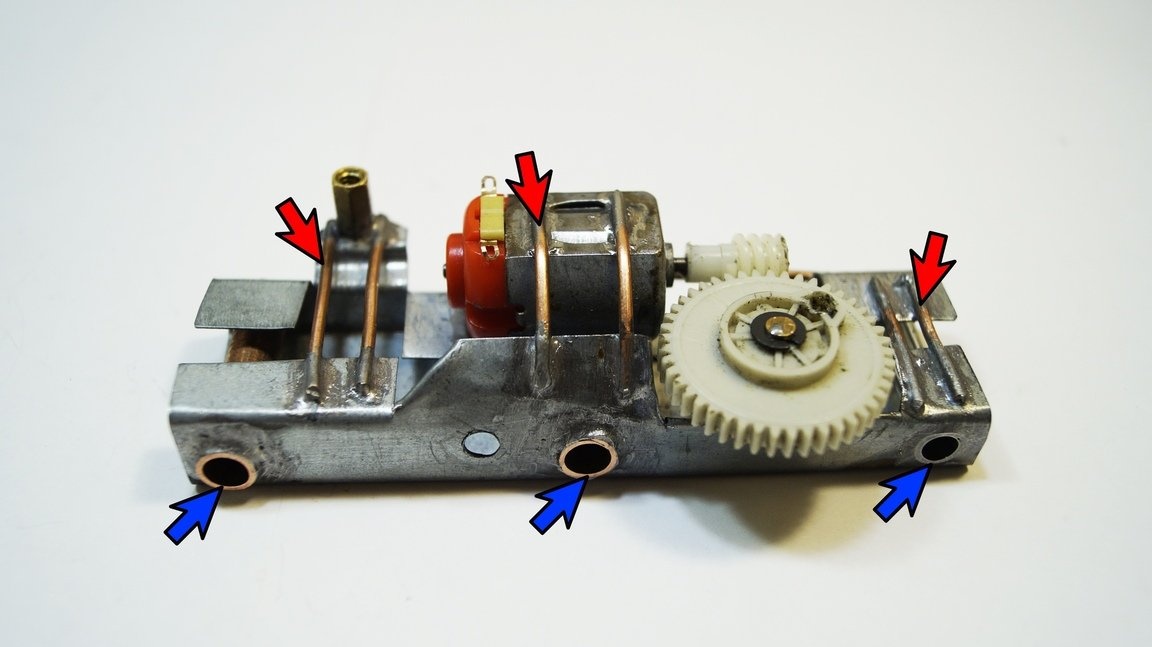
Untuk melampirkan kaki cakar ke bingkai, anda perlu menggerudi lubang dengan gerudi 8mm. Kami menggerudi lubang di telinga di belakang motor elektrik dengan gerudi 3.2mm
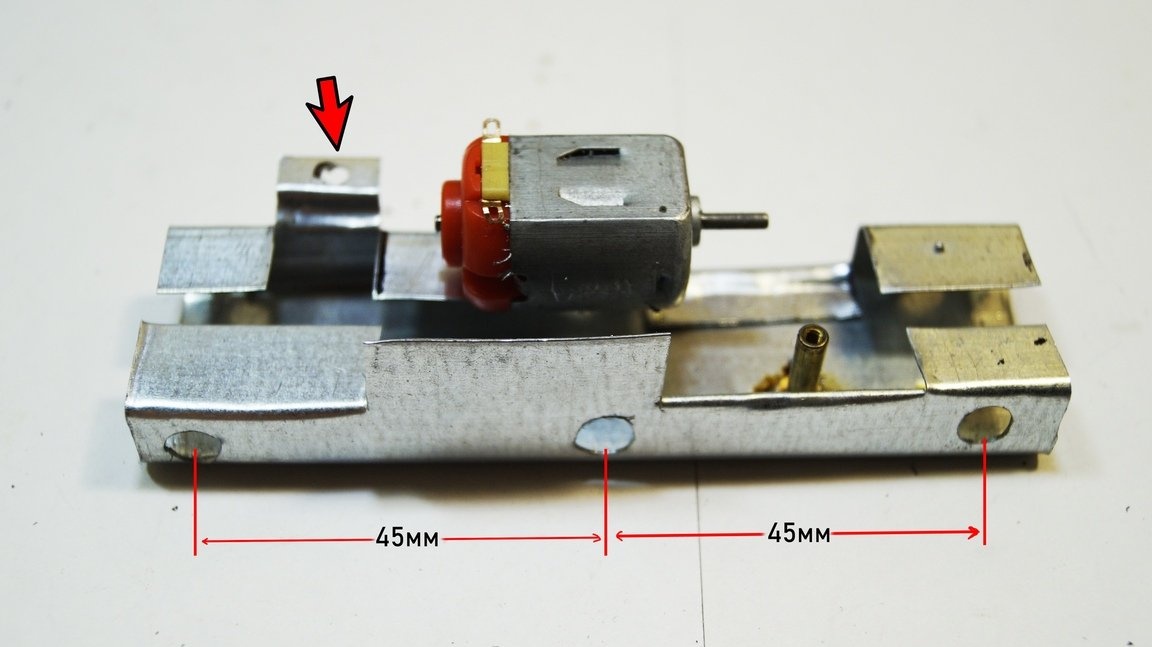
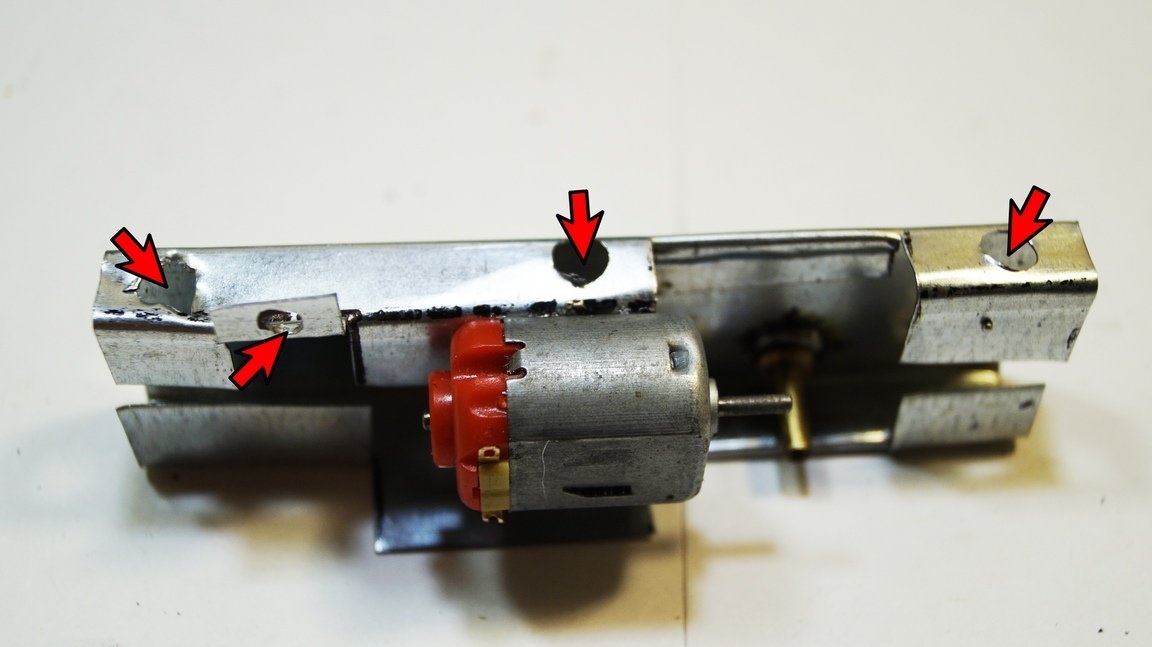
Kami juga menyebarkan kacang di telinga di belakang motor elektrik. Tuas yang bertanggungjawab untuk mengangkat kaki tengah di sepanjang paksi menegak akan dipasang pada kacang ini
Untuk mengukuhkan reka bentuk bingkai, pengetus disolder dengan wayar tembaga 2.5 mm.
Sekeliling 8mm juga disalurkan ke titik-titik lampiran cakar kecoa Foto 15.
4. Cakar kecoa.
Kawat logam dengan diameter 3 mm digunakan sebagai cakar kecoa, ia disalurkan ke kepala bolt M6. Foto 16. Pasangan tengah cakar kecoa dibuat berbeza, lubang dibor di kepala bolt di sepanjang diameter wayar. Kawat bengkok dalam bentuk huruf "S", ini akan membolehkan kaki kecoa bergerak secara menegak. Gambar 17.
Foto 16.
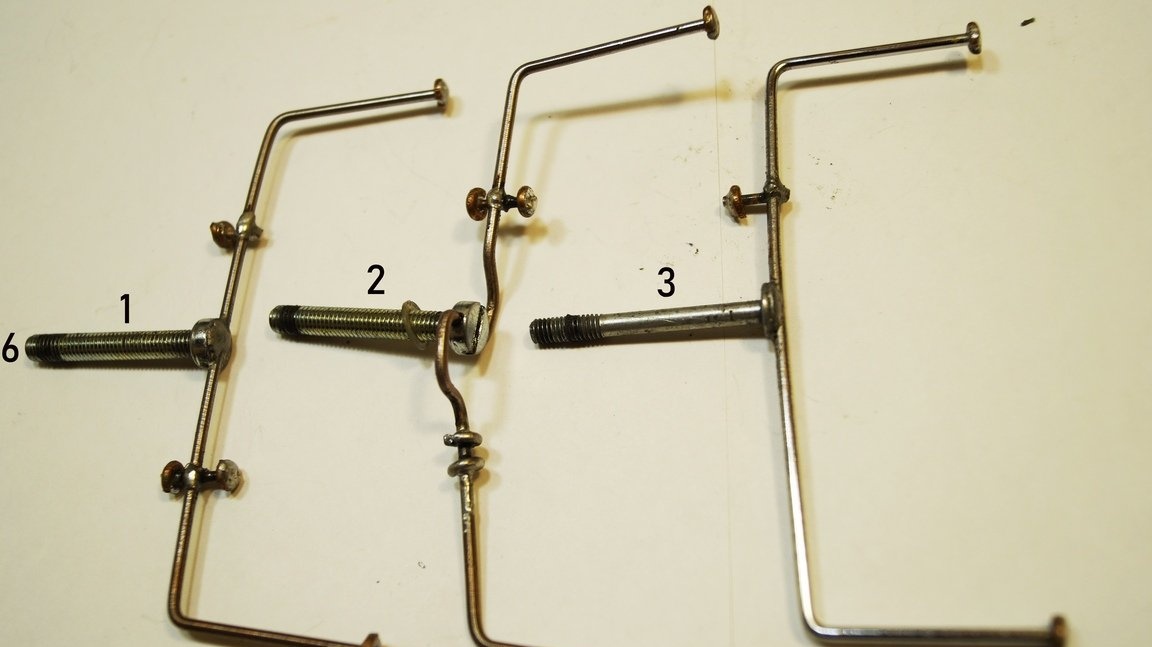
Foto 17.

Untuk pengancing rod, satu dawai tembaga dengan panjang seksyen 2.5 mm panjang 12 mm dipaterikan ke kaki cakar, cincin tembaga disolder ke hujungnya. Batang diperbuat daripada dawai tembaga dengan seksyen salib 2.5 mm, dimensi adalah anggaran, adalah dinasihatkan untuk membengkokkan dawai supaya pada masa akan datang terdapat kemungkinan penyesuaian sepanjang tempoh Photo 18.
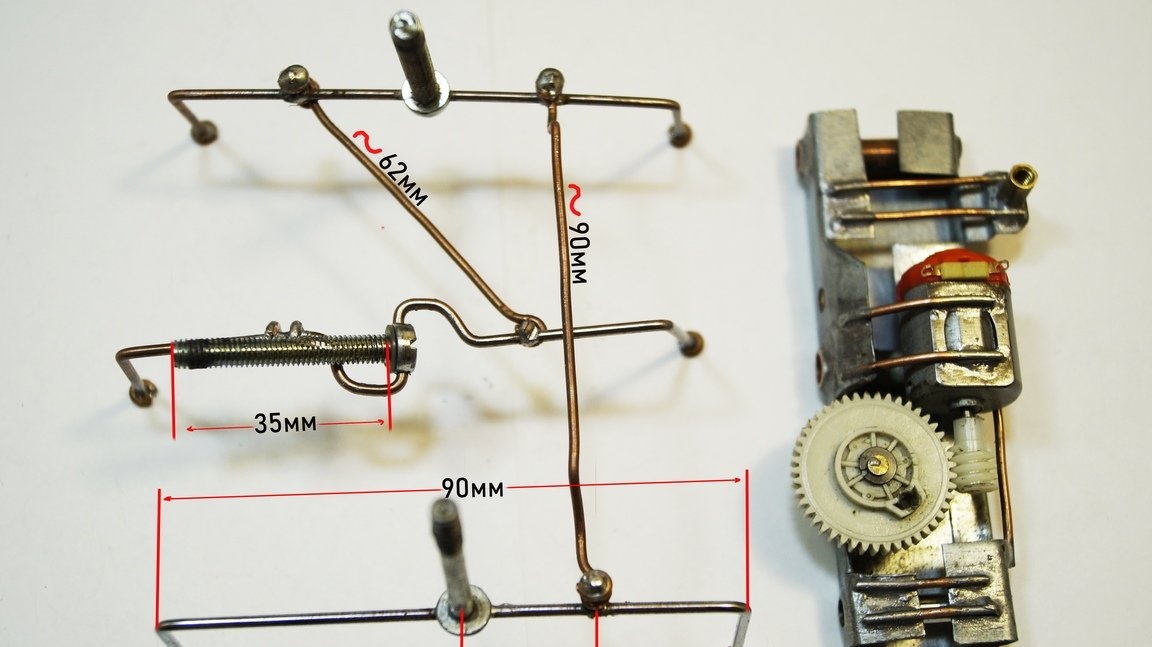
Foto 19 menunjukkan paparan bawah, dengan cakar dipasang pada bingkai.
Kami menubuhkan daya tarikan dari mekanisme engkol ke kaki hadapan lipas. Kami melakukan satu teras dengan keupayaan untuk menyesuaikannya. Crank radius 8mm Photo 20.
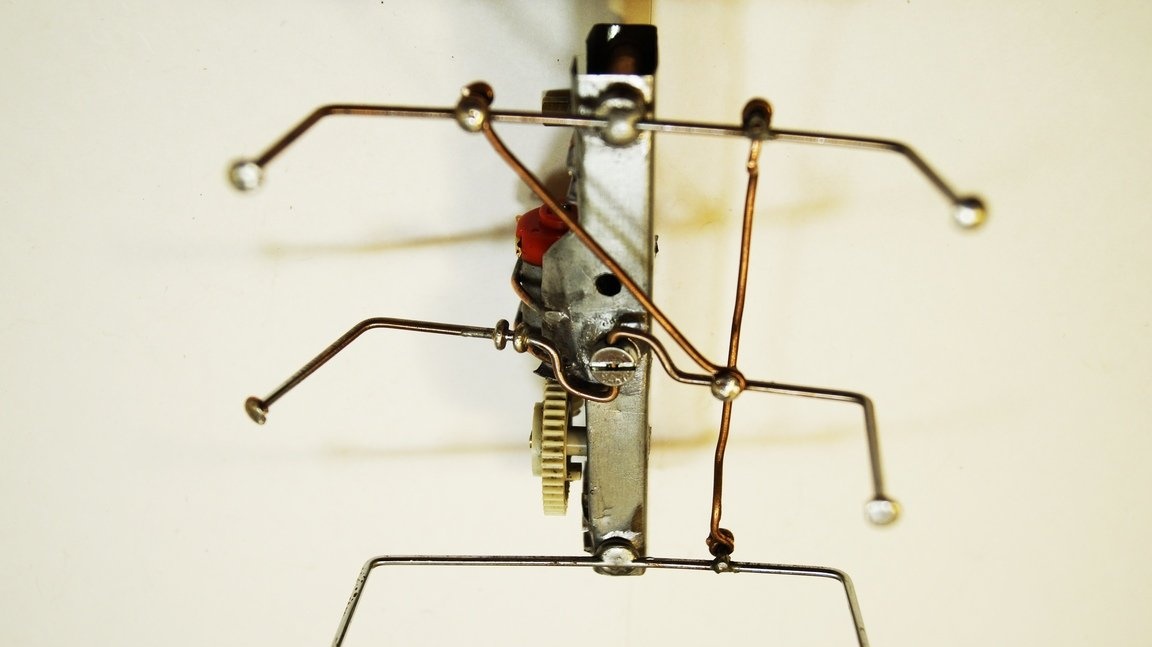
Kami membuat tuil untuk menggerakkan kaki tengah menegak dari tembaga dawai Foto 21.22.
Ini melengkapkan bahagian mekanikal lipas.
Foto 21.

Gambar 22. Lokasi kaki pada kedudukan bawah batang engkol ditunjukkan.
Foto 22.

5. Bahagian elektrik.
Melekatkan petak bateri pada pita bermuka dua ke bingkai kecoa. Guna butang kuasa pada petak bateri. Kami menyolder semua elemen Photo 23.
Robot - Lipas itu sudah siap !!!