


Dalam artikel ini, Wizard akan menunjukkan kepada kami bagaimana beliau membuat laksamana Lego 60193 Air Transport Artik model itu quadrocopter. Tugas utama dalam pembuatan quadrocopter, sebagai tambahan kepada kualiti terbang, adalah untuk menyelamatkan sebanyak mungkin bahagian asli.
Mari kita lihat video pendek yang menunjukkan operasi kuadrobopter.
Jadi, untuk pembuatan quadrocopter seperti itu, tuan menggunakan perkara berikut
Alat dan bahan:
-LEGO City Artik Helikopter - 60193:
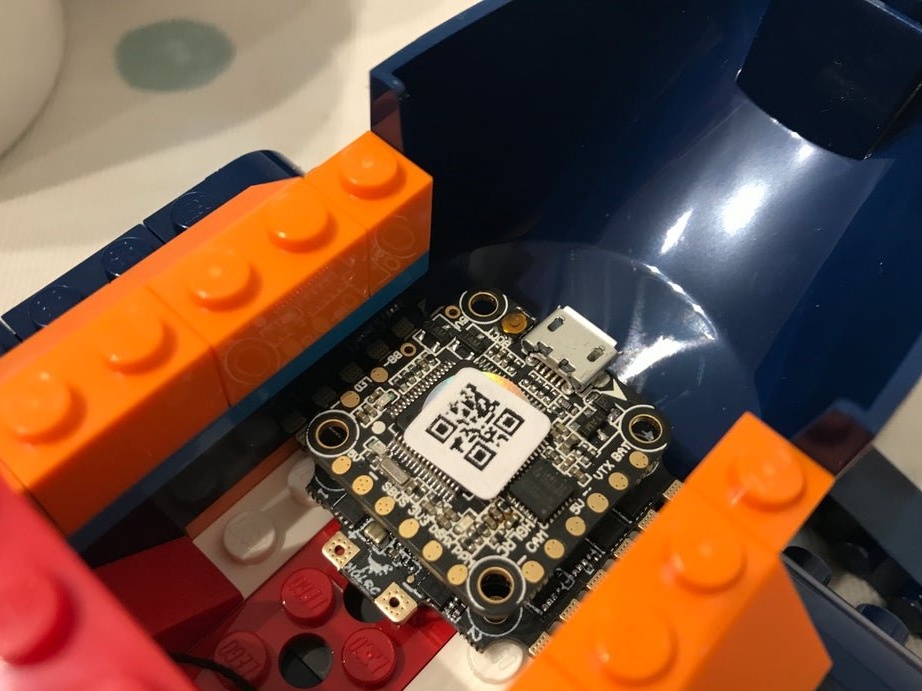
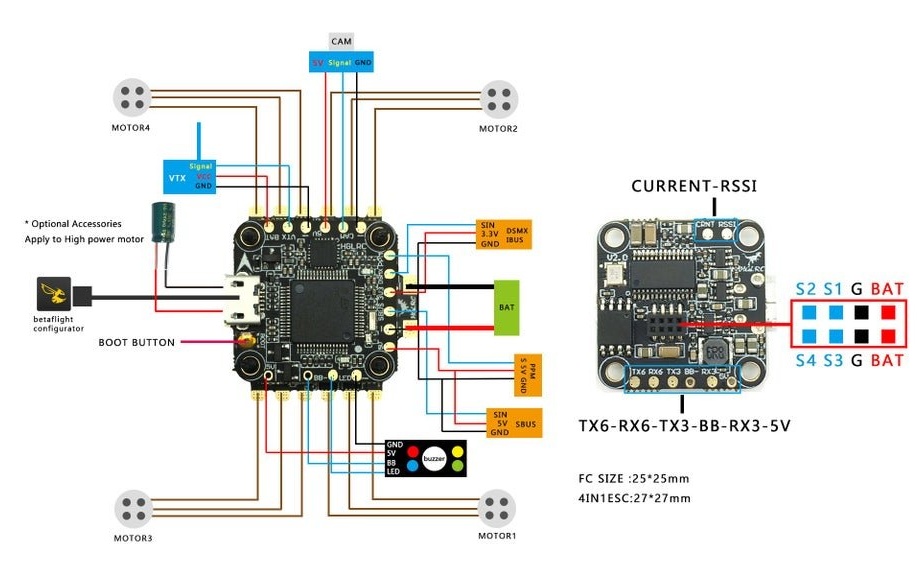
- Pengawal dan ESC 20x20 mm, sebagai contoh, HGLRC XJB F428 Micro F4 AIO OSD;
- Motor tanpa siku - 4 pcs;
Kipas
-Bateri 950 mAh;
-Kelayan;
-Wire;
-Radio module (pemancar dan penerima);
-Fasteners;
-Knife;
-Pemeterian besi;
-Glue gun;
- pemutar skru;
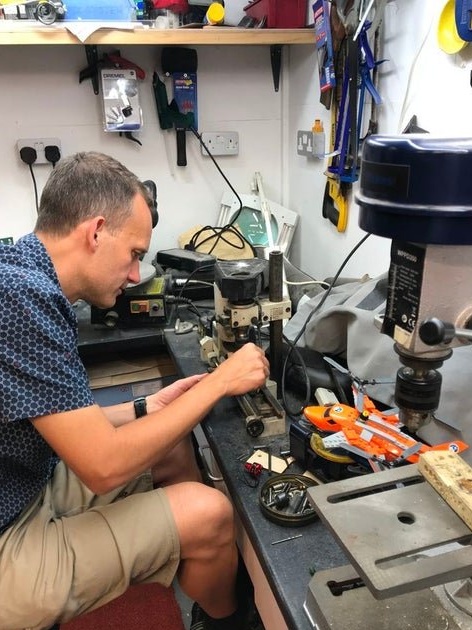
-Drill;
Langkah Pertama: Lego Build
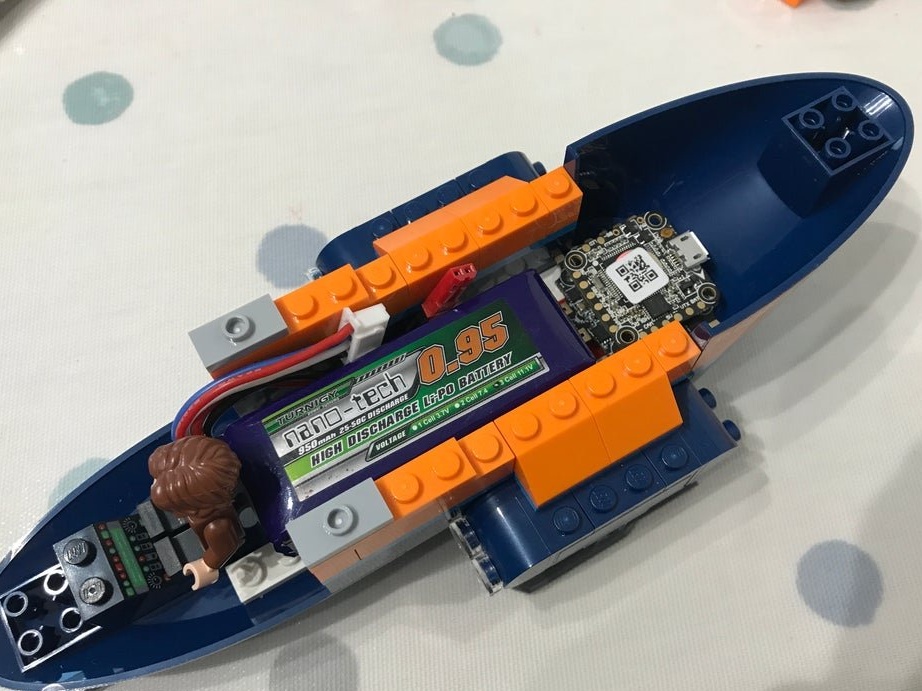
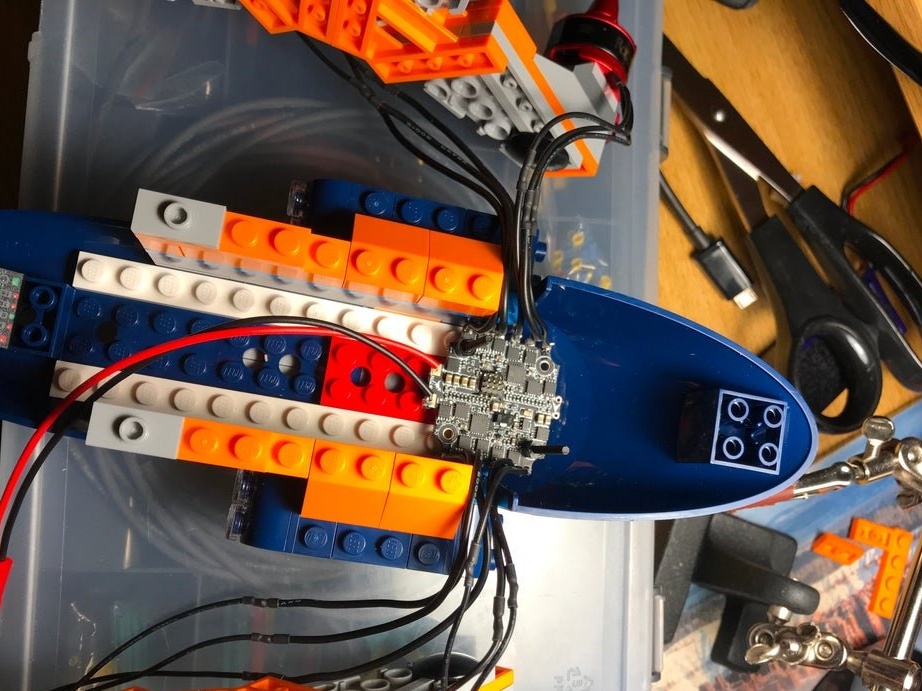
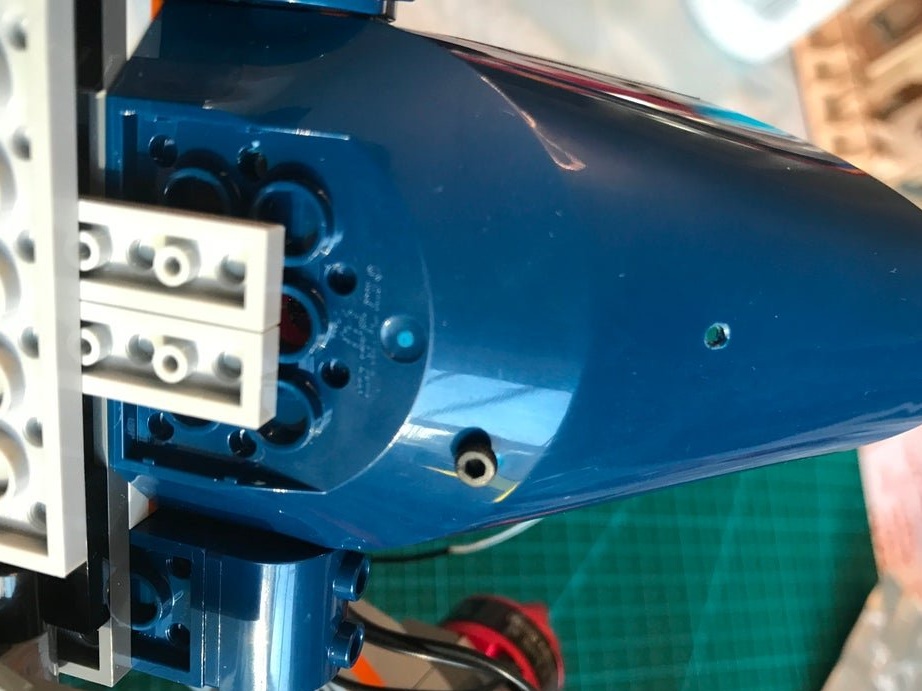
Pertama, tuan mengumpul LEGO-Artik. Kemudian model itu sebahagiannya dibongkar. Di dalam, anda perlu meletakkan bateri dan pengawal, memerhatikan pengimbangan model.


Langkah Dua: Mount Engine
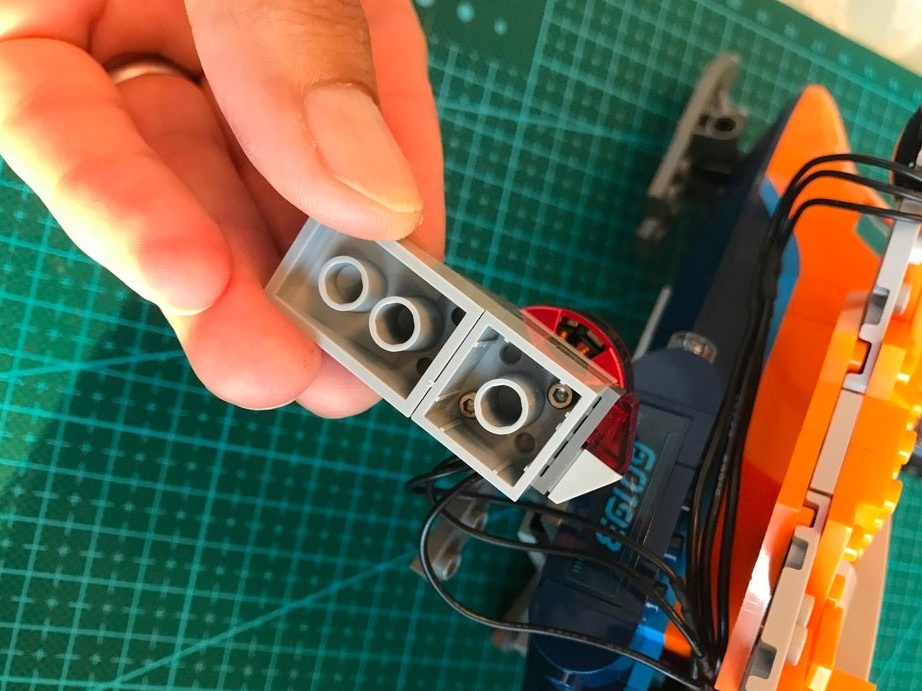
Lubang-lubang pelekap untuk motor berus 1806 standard cukup sama seperti kancing pada plat LEGO 2x2 standard. Setiap "enjin" dipasang pada quadrocopter mempunyai jubin kelabu gelap 2x2 (LEGO 3022) dan jubin kelabu cahaya 2x2 dengan pin vertikal (LEGO 2460), yang biasanya diadakan di hab kipas LEGO di atas.
Tuan menggerudi lubang pelekap. Pada motor, di tengah-tengah terdapat air pasang surut. Lubang di bawahnya dibor di tengah jubin. Selamatkan enjin.








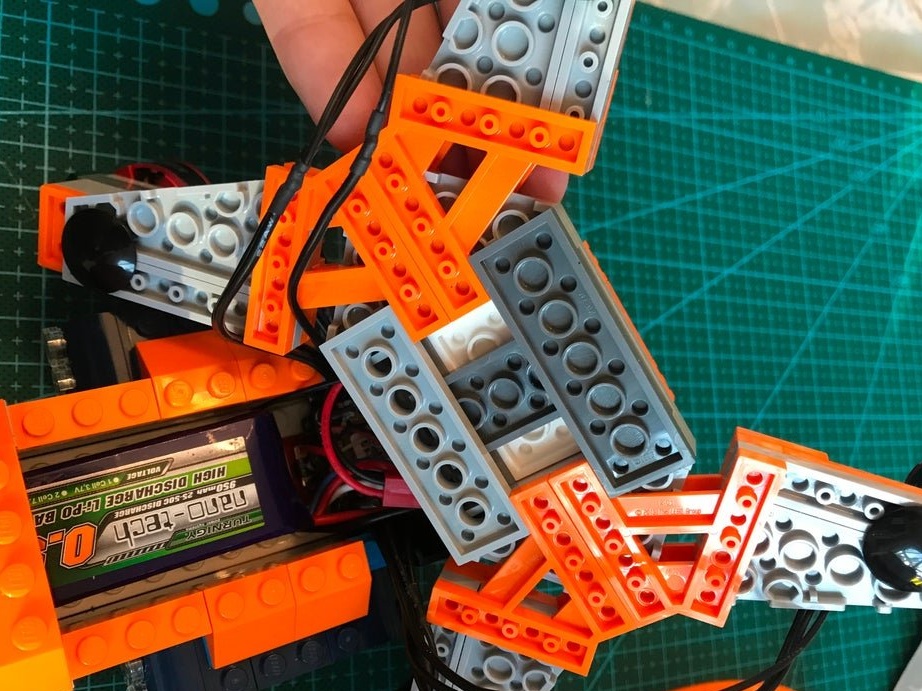
Langkah Tiga: Bahu
Menetapkan semula "bahu" dari quadrocopter, anda boleh sedikit mengubah susun atur untuk menyediakan susunan enjin yang lebih luas atau sempit dan lokasi skru relatif terhadap satu sama lain.
Perhimpunan LEGO standard (foto pertama) mempunyai "bahu" dan enjin terletak luas (mendatar) dengan overlap yang agak besar. Tuan remake "bahu" dan melemparkan enjin dan, dengan itu, skru.



Langkah Empat: elektronik
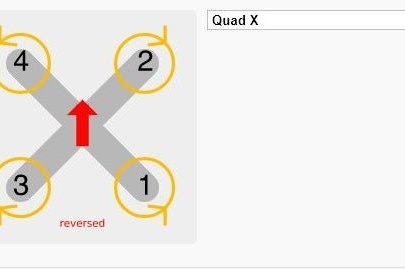
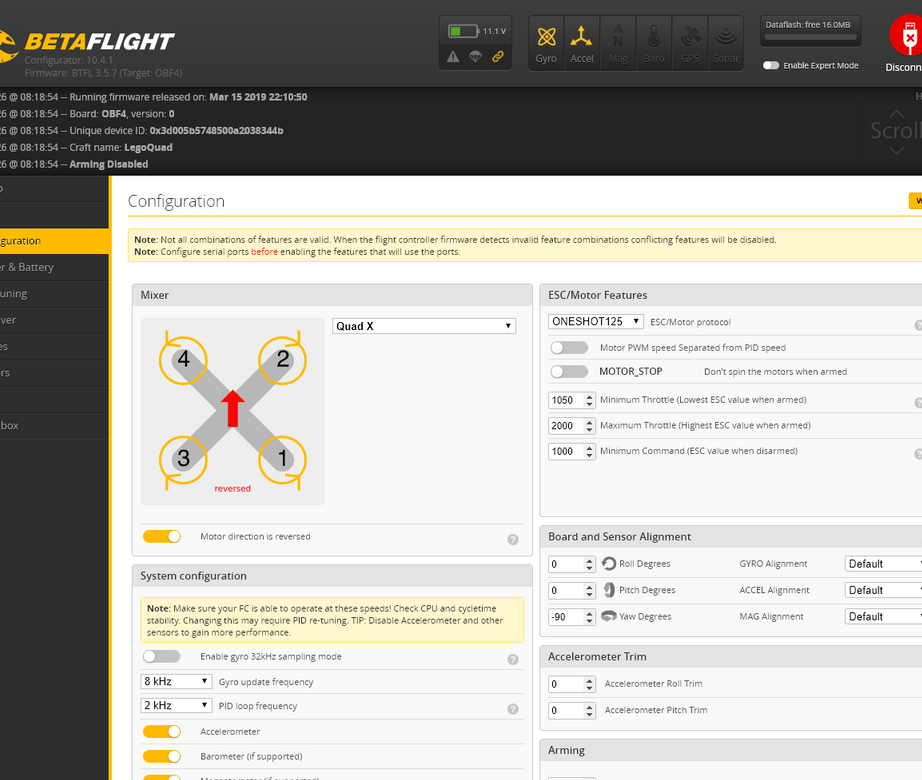
Menurut skim, ia memasang elektronik. Gambar pertama menunjukkan gambarajah arah putaran enjin. Arah putaran juga boleh diubah pada peringkat pengaturcaraan.

Selepas pemasangan selesai, dan sebelum menyambungkan bateri, wizard memeriksa sambungan untuk mencegah kerosakan atau litar pintas.
Apabila anda menghidupkan kuasa, anda perlu melihat lampu pada pengawal penerbangan dan beberapa bip dari ESC.
Langkah Lima: Persediaan
Sekarang segala-galanya bersambung, sudah waktunya untuk mengkonfigurasi pengawal.Ini bermakna memuat turun perisian (perisian tertanam) yang melaksanakan tugas isyarat kawalan pengekodan dari pemancar RC, memproses isyarat masukan sensor (pemecut, giroskop) dan menyediakan isyarat kawalan untuk ESC untuk memutar enjin pada kelajuan tertentu.
Keluarkan kipas untuk keselamatan! Bateri tidak diperlukan untuk beberapa langkah persediaan yang pertama, hanya kuasa USB.
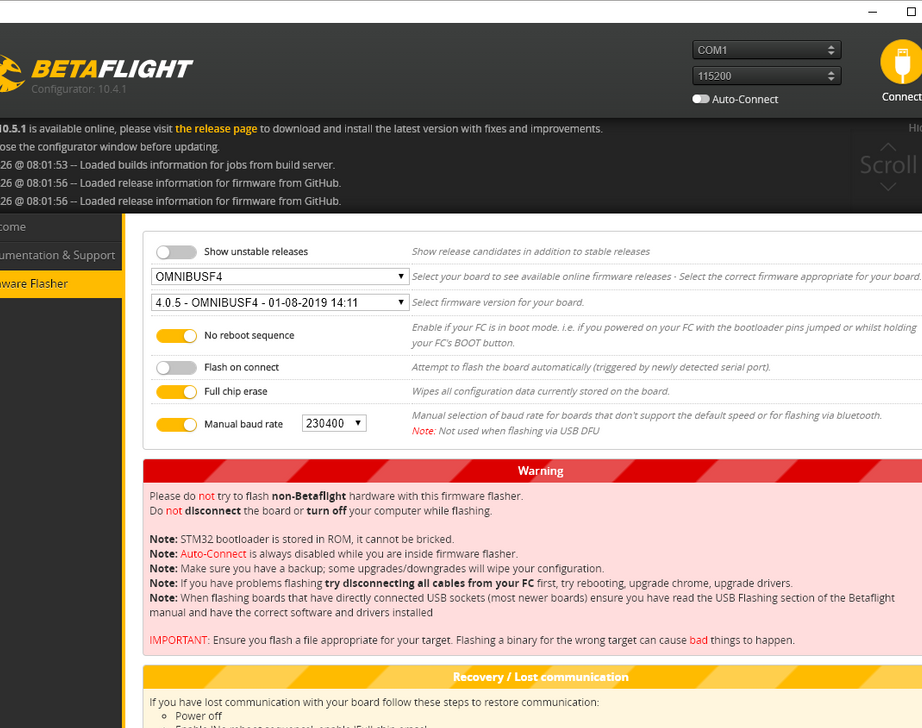
Muat turun Beta Configurator
Sambungkan kabel USB mikro ke pengawal penerbangan. Sila ambil perhatian bahawa ini mungkin lebih mudah dilakukan jika pengawal tidak diskru ke casis.
Muat turun dan muat naik firmware yang sesuai untuk pengawal penerbangan.
betaflight-settings-legoquad.txt
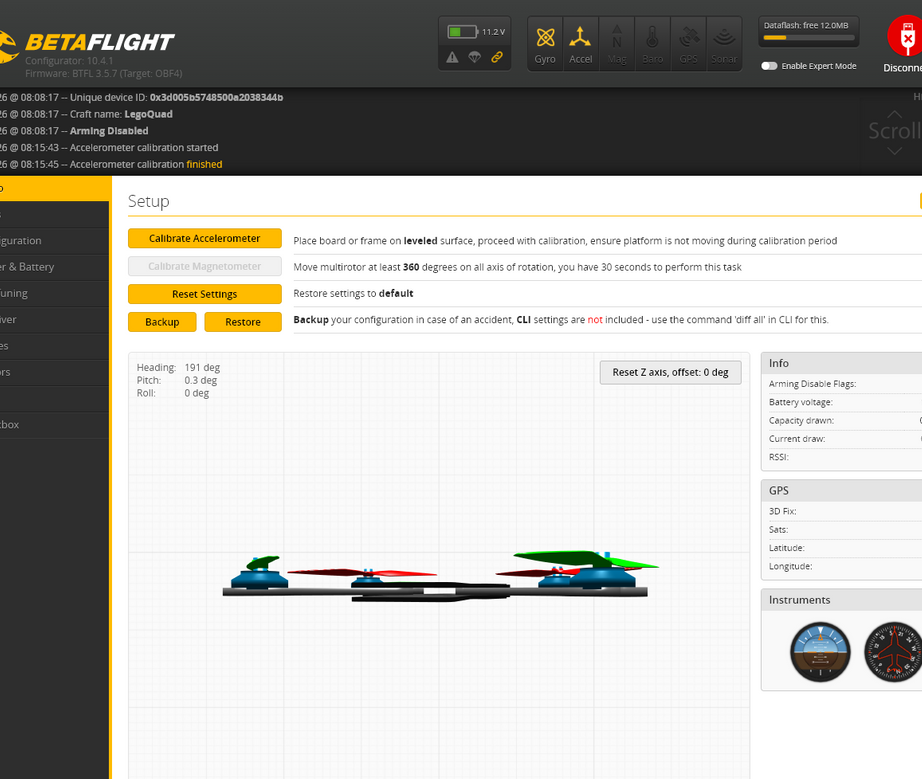
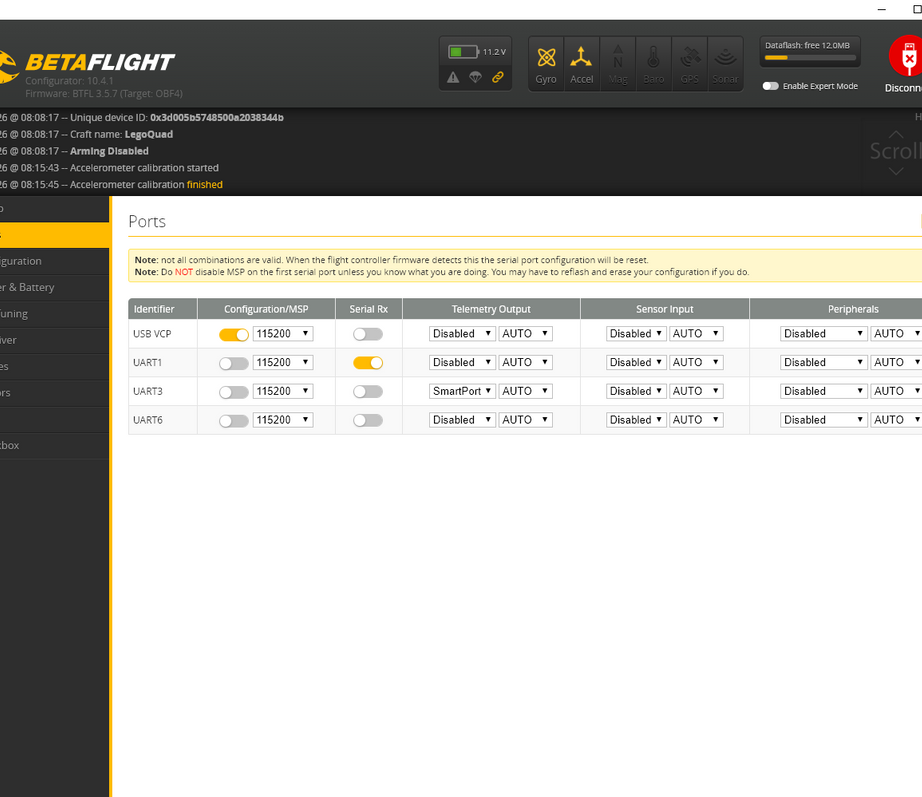
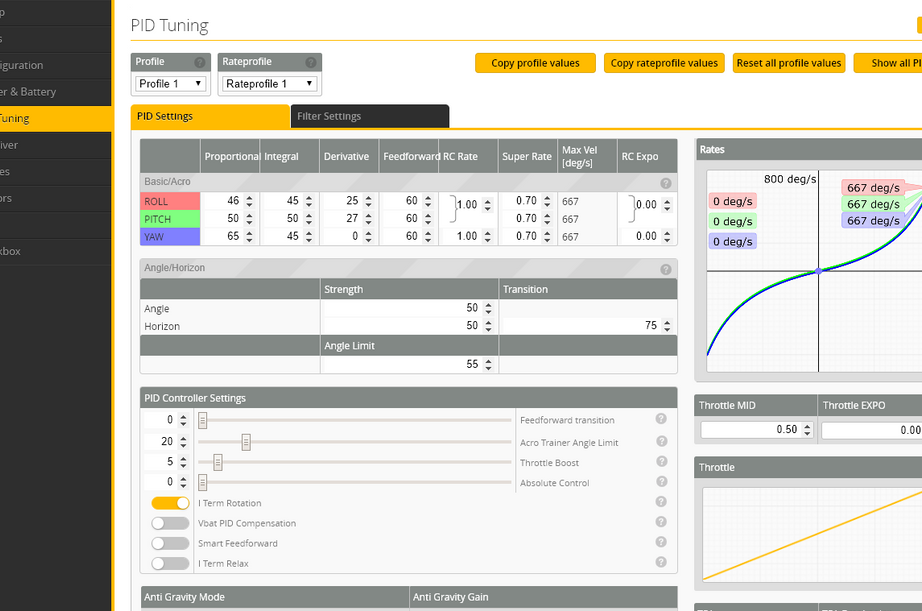
Klik butang "Sambung" dan konfigurasikan tetapan berikut:
1. Persediaan - penentukuran model enjin
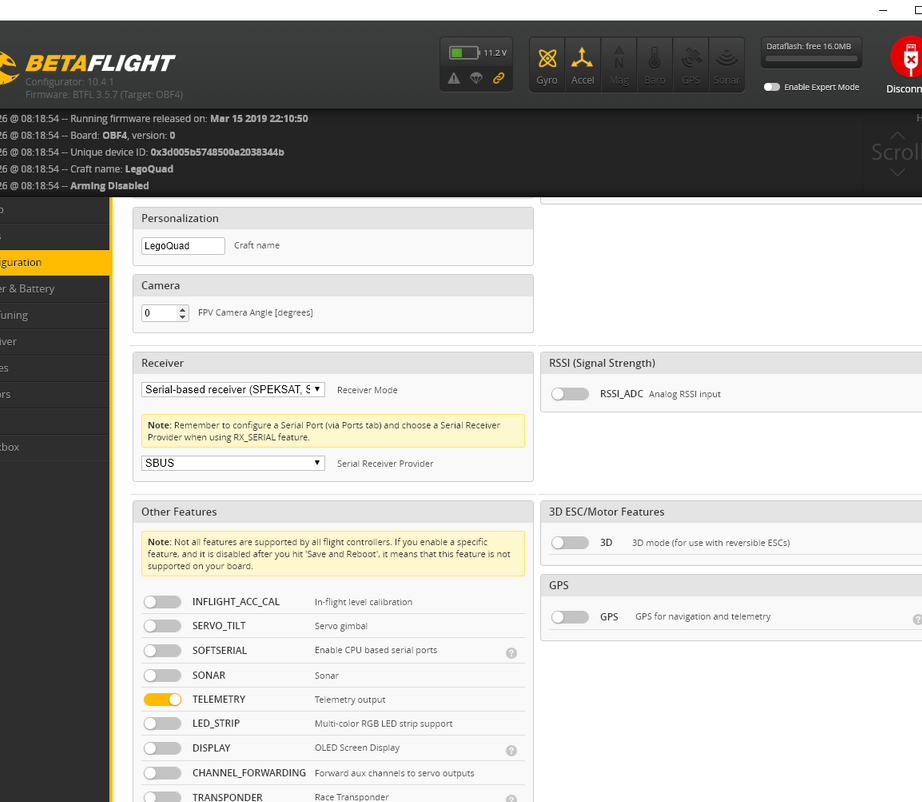
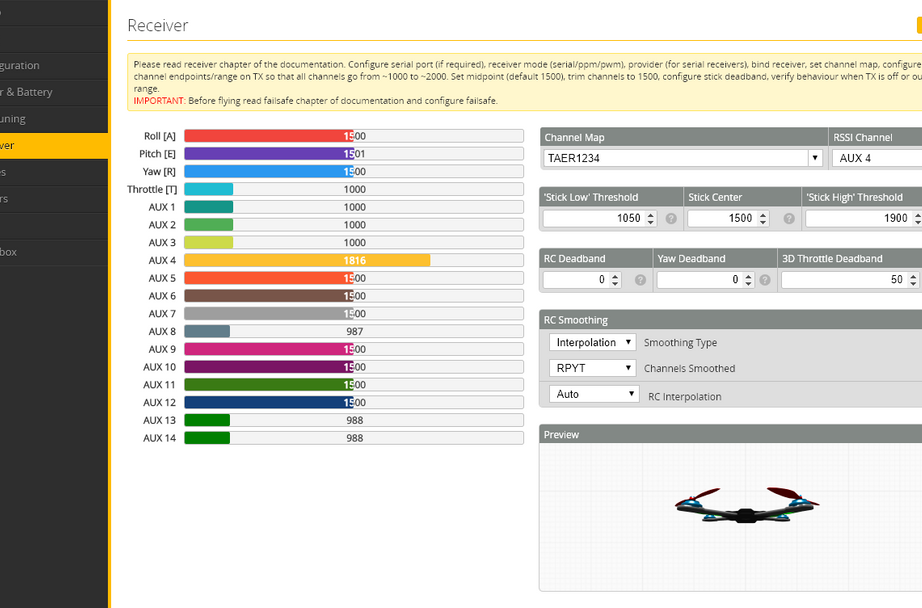
2. Tentukan port - UART1 - Serial RX untuk menyambung penerima SBUS RC
3. Penjimatan dan reboot
4. Menubuhkan sambungan antara penerima dan pemancar
5. Kelebihan beban
6. Nilai untuk induk PID ditetapkan kepada 250
7 Sambungkan bateri
8. Laraskan voltan.
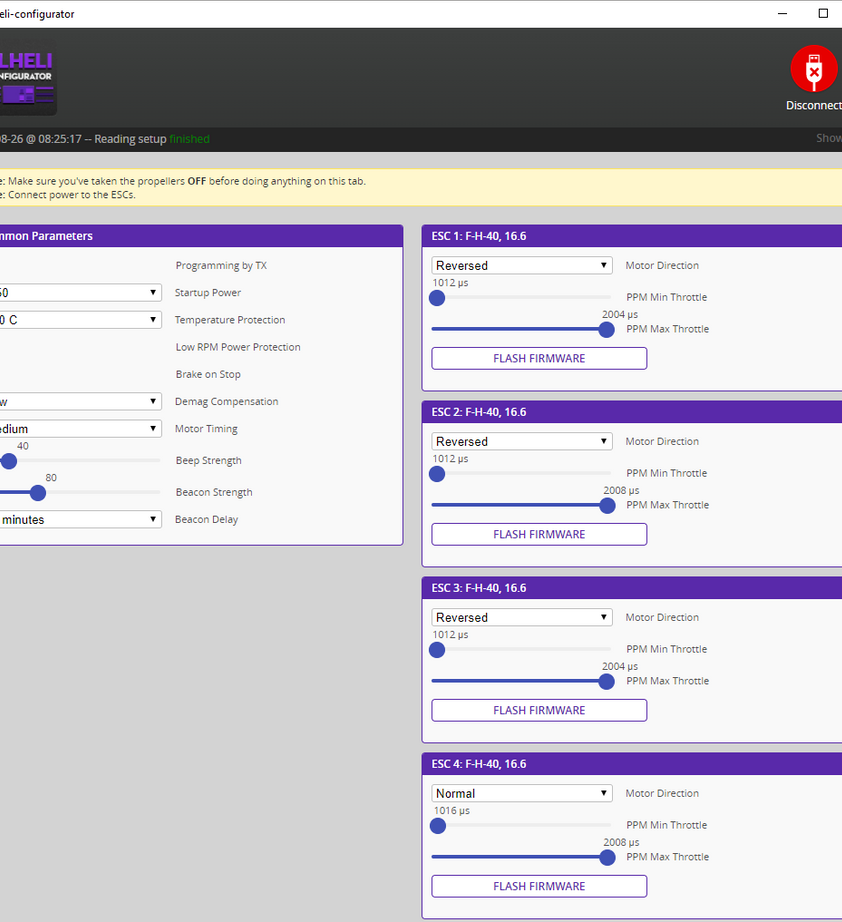
9. Pastikan bahawa paparan saluran dan kawalan anda adalah betul, apabila semuanya ditetapkan, imej model kuadrobter di sudut kanan bawah harus bergerak dalam semua arah yang betul apabila menggerakkan joysticks pada pengawal RC.
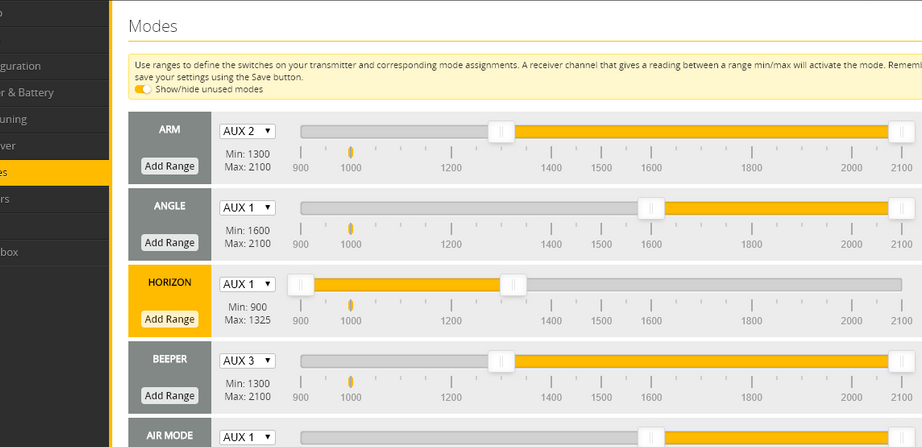
Mengkonfigurasi mod.
ARM hidup / mati
HORIZON self-leveling / ACRO untuk penerbangan FPV tradisional
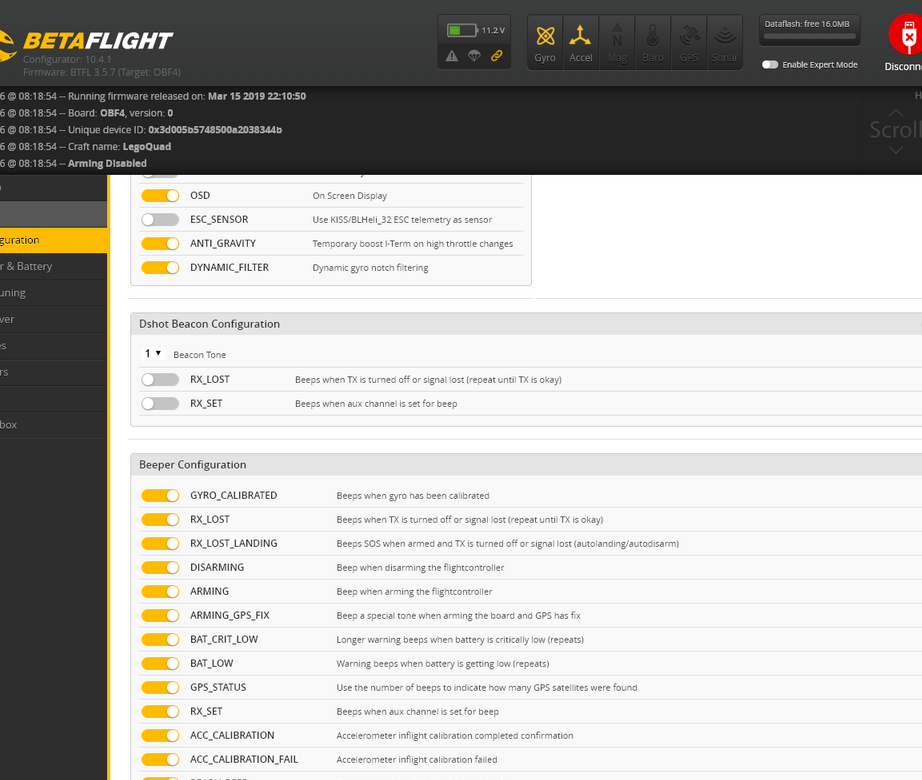
BEEPER - Berguna jika anda kehilangan model di rumput atau semak tinggi.
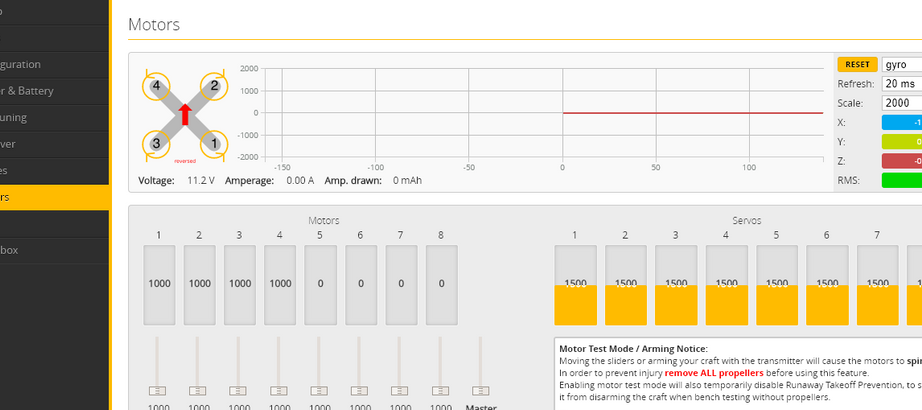
Tab "Motors" - gunakan pilihan ini untuk memeriksa setiap enjin secara individu, dan, pentingnya, tandakan arah putaran masing-masing
Betulkan sebarang arah putaran yang salah dengan konfigurasi BLHELI
Selepas semua langkah ini, anda boleh mencabut USB dan bateri, dan kemudian hidupkan kuasa dan semak bahawa semuanya berfungsi:
Hidupkan pemancar dan kuasa
Sambungkan bateri dan pasangkan alat quadrocopter pada permukaan rata
Hidupkan suis ARM dan motor mesti mula berputar pada kelajuan rendah.
Semak pendikit sambil meningkatkan kelajuan
Dalam mod mendatar, cuba menyambung quadrocopter dan pastikan bahawa enjin bertindak balas dengan sewajarnya, contohnya, condong ke hadapan dan enjin depan akan mempercepatkan.

Langkah Enam: Perhimpunan Akhir
Hampir keseluruhan struktur kes itu diadakan dengan kunci pemasangan. Tuan hanya menggunakan pelekat panas-mencair untuk memasang motor.


Segala-galanya sudah siap dan anda boleh menguji.



