

Robot DIY akan menjadi mainan yang hebat untuk kanak-kanak, juga dengannya anda boleh bermain saudara-mara atau rakan-rakan. Intipati robot adalah seperti berikut. Ia adalah kotak dengan suis. Sebaik sahaja seseorang mengklik suis pada kotak, pintu mula dibuka, dari mana satu tangan keluar dan meletakkan suis kembali ke keadaan asalnya. Walaupun kesederhanaan luar robot, sebenarnya, semua ini kelihatan agak lucu.
Asas untuk membuat robot adalah litar Arduino. Terdapat juga beberapa elemen mekanikal yang akan dibincangkan di bawah. Mari kita perhatikan lebih terperinci bagaimana boleh lakukan sendiri memasang robot semacam itu.
Bahan dan alat untuk pembuatan:
- Papan Arduino, apa sahaja dengan output PWM akan lakukan;
- servomotor, dua keping (sesuai model itu Futaba - S3003, kuasa enjin sedemikian cukup untuk membuka pintu, peranti menghasilkan kuasa sehingga 3.2 kg / cm);
- bateri;
- jenis suis SPST atau SPTT;
- suis untuk mengawal kuasa bateri;
- anda memerlukan butang untuk memulakan semula Arduino;
- wayar, jumper dan lain-lain perkara kecil.

Di samping itu, anda juga memerlukan kotak gear (sesuai untuk kereta yang dikawal oleh radio), papan untuk motor elektrik yang disebut perisai motor Arduino, motor servo RC. Komponen-komponen ini diperlukan untuk membuat kotak bergerak, seperti pengarang.
Untuk mengurangkan tahap bunyi semasa operasi peranti, kapasitor jenis elektrolisis dengan nilai nominal 10mF, perintang 10K, dan inverter 74HC04 diperlukan.
Proses pembuatan robot:
Langkah pertama. Cara membuat kotak
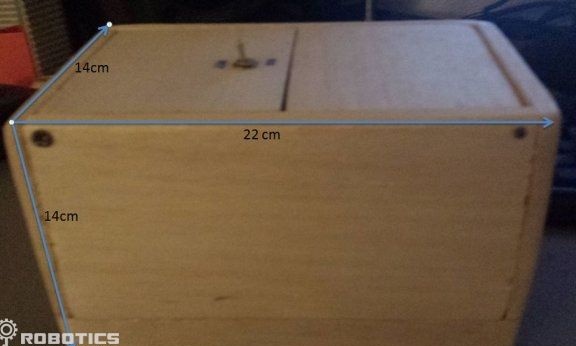
Untuk membuat kotak, iaitu badan robot, anda perlu mencari papan lapis atau gabus. Di samping itu, anda memerlukan gam yang kuat untuk melekatkan kayu. Adalah penting untuk memahami bahawa semakin banyak struktur yang berat, lebih banyak tenaga akan dimakan. Bagi saiz kotak, ia adalah 22cm x 14cm x 14cm.
Langkah Dua Rajah skematik e bahagian
Bahagian atas robot termasuk papan utama Arduino, dua servo, dan suis. Bagi litar, yang bertanggungjawab terhadap jumlah bunyi bising, ia boleh diganti dengan perintang biasa.
Pemacu servo dikuasakan melalui pin kelima papan Arduino. Bagi wayar isyarat, ia disambungkan kepada kenalan 9 dan 10. Terima kasih kepada kenalan PWM ini, sudut putaran servomotor dikawal. Ini adalah sudut dari 0 hingga 180 darjah.
Butang merah diperlukan untuk memulakan semula Arduino.
Di bahagian bawah litar adalah perisai motor Arduino.Di papan anda boleh melihat dua saluran, A dan B, terima kasih kepada mereka, jika dikehendaki, anda boleh menyambungkan dua motor sekaligus. Tugas utama lembaga ini adalah dengan itu anda boleh menetapkan kelajuan putaran, arahan, pemecahan untuk saluran mana-mana enjin. Sekiranya anda melihat rajah, maka saluran B digunakan, manakala hubungan 13 menentukan arah, hubungi 11 adalah laju, dan kenalan 8 digunakan untuk mengawal brek.
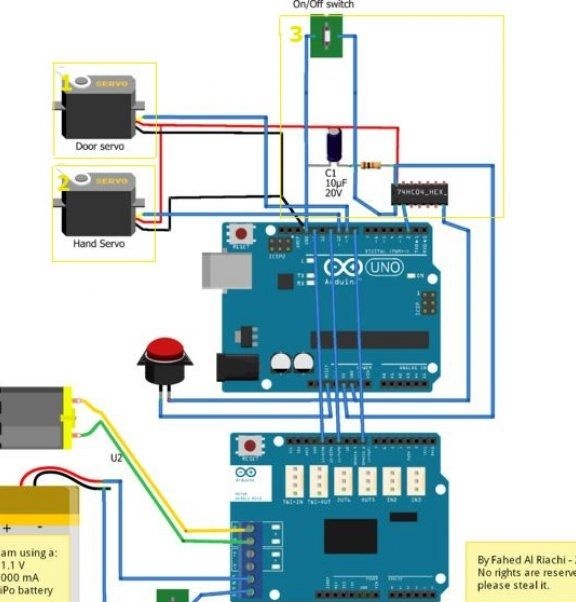
Sumber kuasa adalah bateri 11.1 / 1000 mA, ia menghubungkan ke papan perisai motor Arduino. Jika ia tidak akan digunakan, maka bateri disambungkan terus ke papan utama.
Langkah Tiga Pemasangan enjin
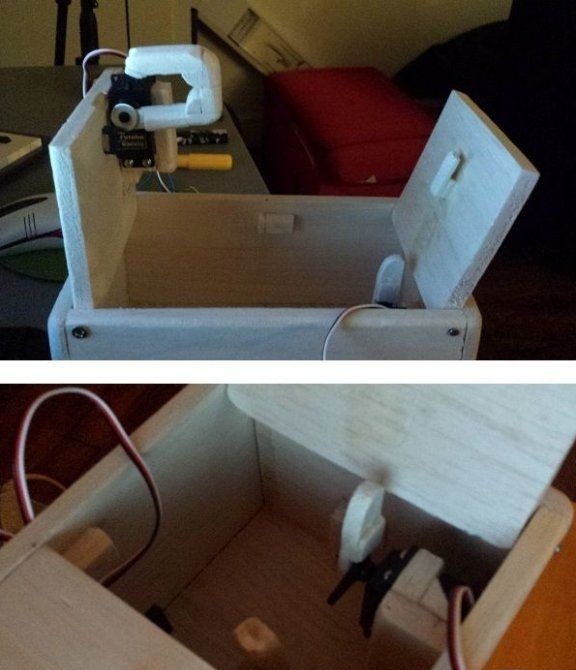
Pemacu servo dan tangan dipasang secara eksperimen, anda perlu menyemak amalan sama ada mekanik berfungsi dengan betul. Untuk memeriksa radius penyimpangan enjin, anda boleh menggunakan program IDE Arduino.
Untuk pembuatan kayu yang diambil dari sebarang jenis. Perkara utama adalah bahawa ia adalah cahaya, sebaliknya penggunaan tenaga akan meningkat. Bagi saiz tangan, ia diselaraskan semasa pemasangan, memilih panjang yang diingini, kesan yang diinginkan dicapai.
Penolak penutup dan tangan dipasang supaya mereka tidak menyentuh servomotor semasa operasi.
Langkah Empat Kami menyambungkan servomotor dan beralih ke Arduino
Menggunakan wayar dan jumper, anda perlu menyambungkan semua elemen elektronik antara satu sama lain mengikut skema yang ditetapkan. Wayar mesti diletakkan supaya mereka tidak mengganggu elemen bergerak robot.
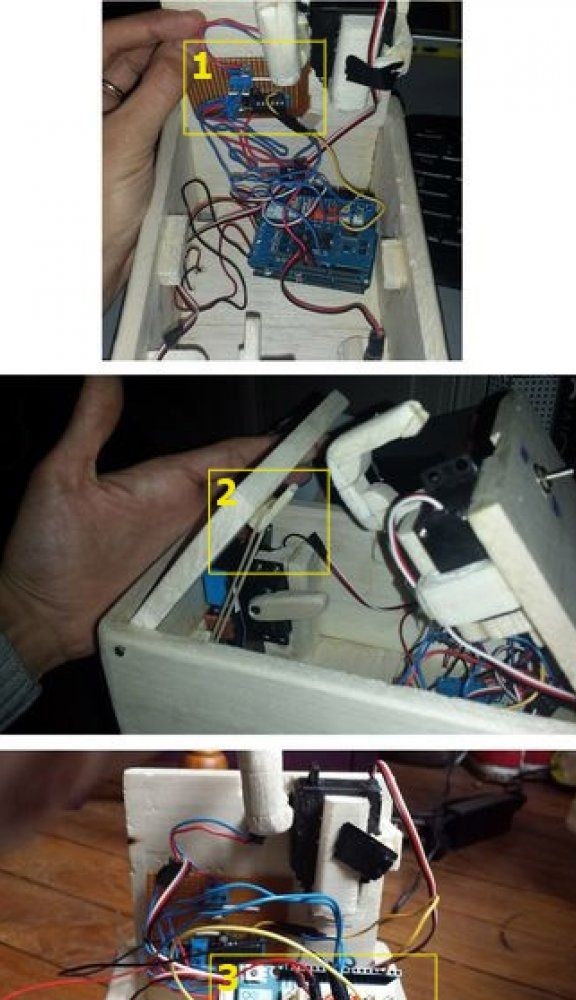
Di bawah nombor 1, anda dapat melihat bagaimana ia disambungkan dan di mana litar suis terletak. Nombor 2 menandakan elemen sedemikian sebagai jalur anjal, ia diperlukan agar pintu dibuka dengan beberapa ketegangan. Nah, angka 3 menunjukkan perisai enjin dipasang pada Arduino.
Langkah Lima Pemasangan bahagian mekanikal untuk menggerakkan kotak
Di bahagian bawah kotak ialah bateri, enjin dengan roda, kotak gear, butang reset, dan suis togol untuk mengawal kuasa robot. Sebelum melampirkan unsur-unsur, anda perlu mengira keseimbangan berat kotak. Agar robot menjadi stabil, sebagai tambahan kepada paksi utama, satu lagi tambahan dipasang.
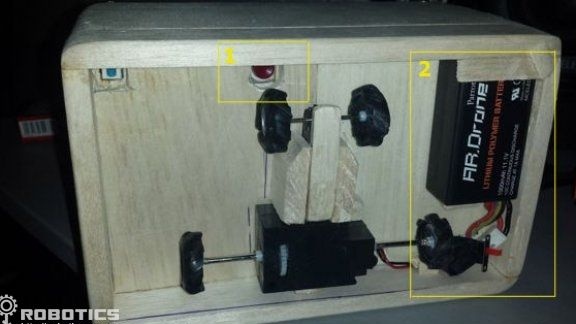
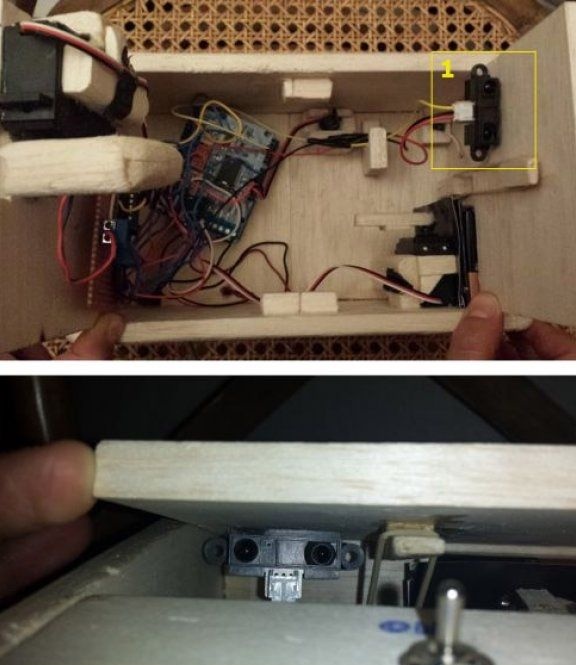
Langkah Enam Satu lagi ciri tambahan
Agar robot menentukan arah pergerakan, ia boleh dilengkapi dengan sensor IR. Pada masa yang sama, apabila seseorang cuba menyentuh suis togol, kotak akan bergerak ke kanan dan ke kiri. Untuk tujuan ini, sensor GP2Y0A21 sesuai, ia mempunyai tiga wayar. Kuning mesti disambungkan ke pin Arduino ketiga, merah ke pin 5, dan hitam ke tanah.
Itulah yang mudah dan pada masa yang sama robot lucu sudah bersedia. Mainan sedemikian akan membawa kegembiraan bukan sahaja kepada kanak-kanak, tetapi juga mengejutkan ramai orang dewasa.
Firmware: