


Saya mengambil bahagian dari reka bentuk saya dari arahan perhimpunan untuk Lego Technic 42029. Selebihnya adalah penambahbaikan saya. Jadi kita perlukan:
- Lego Technic 42029
- Arduino Nano 382P
- DRV 8833 (lebih baik daripada Populus, tetapi rakan sejawatannya juga mungkin)
- 2 pemacu servo SG-90
- Penerima IR
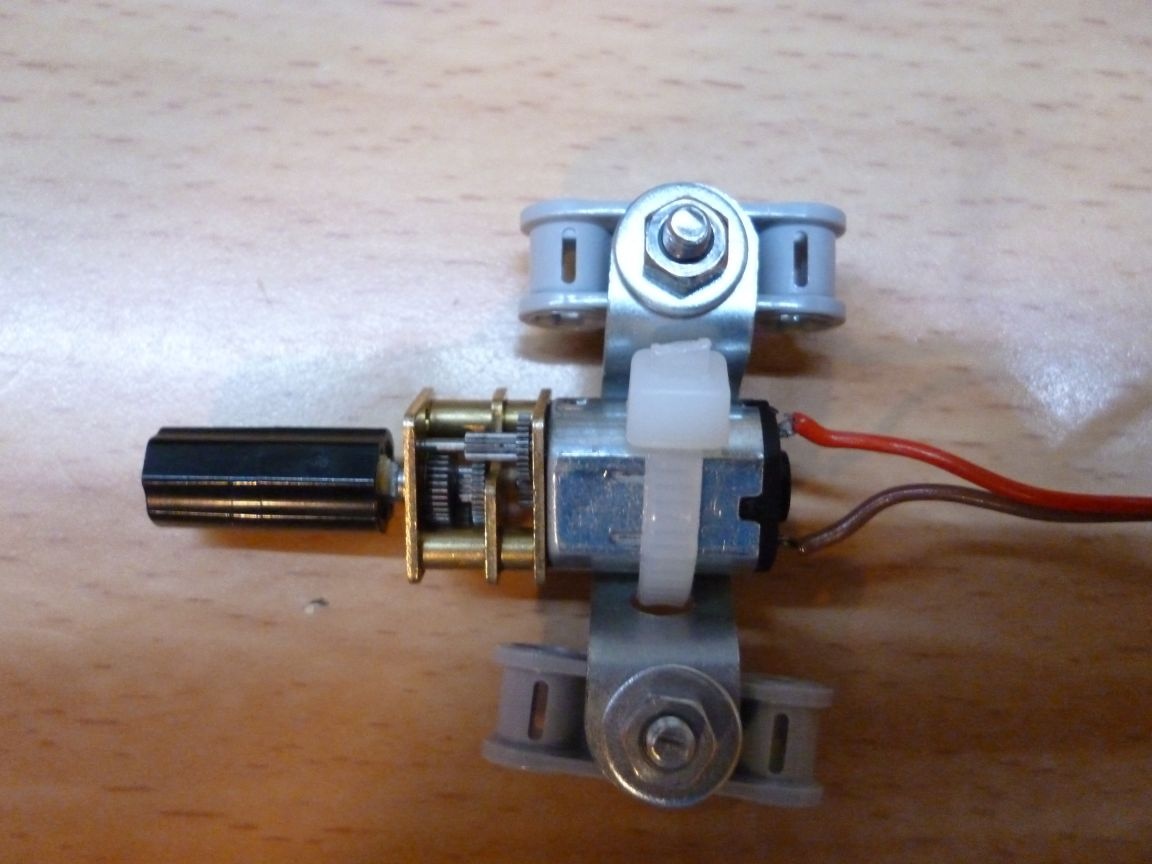
- Kotak gear motor 200 rpm
- 2 LED
- 2 resistor 150 ohms
- Kapasitor 10v 1000uF
- 2 satu baris sisir PLS-40
- 2 penyambung PBS-20
- Induktor 68mkGn
- 6 NI-Mn 1.2v 1000mA bateri
- Penyambung ayah-ibu dua pin ke wayar
- Homutik
- Wayar warna yang berbeza
- solder
- Rosin
- pisau alat tulis
- besi pematerian
- Bolt 3x40 dan kacang dan pencuci untuk mereka
- Bolt 3x60
- Bateri Ni-Mn 1.2v 1000mA 6pcs.
Langkah 1 kami mengumpul belakang penggantungan.
Pertama, anda perlu memasang belakang penggantungan mengikut arahan Lego 42029 bahagian 1, bermula dari 3 muka surat dan 8 termasuk. Seterusnya, tambahkan beberapa butiran supaya anda boleh memasang enjin dan kotak gear.

Langkah 2 penggantungan depan.
Kami memasang bahagian depan suspensi mengikut arahan Lego 42029 bahagian 1, dari halaman 21 hingga 23. Kami mengambil trapezoid dari bahagian kedua arahan Lego dari halaman 6 hingga 11. Kami memasang win dari bahagian kedua halaman 14-22. Dan bahagian kedua bumper adalah 34 -36 halaman.
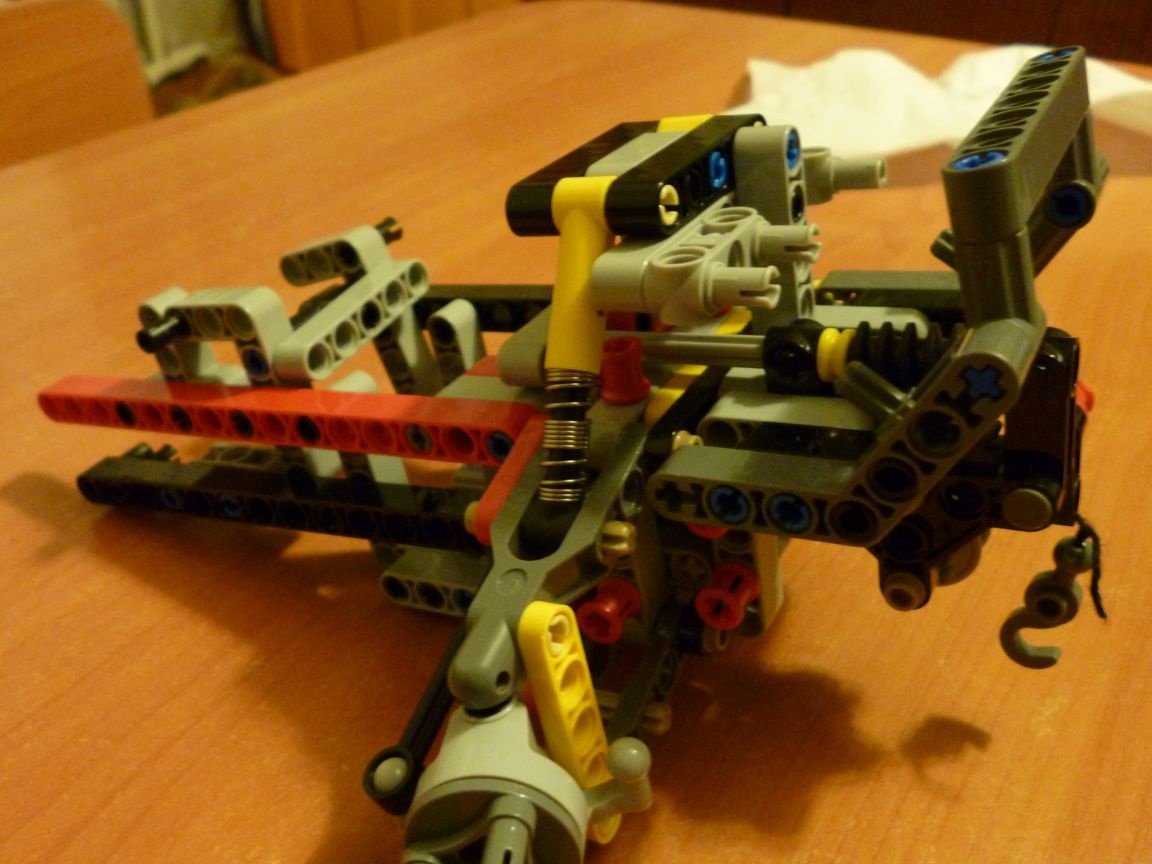
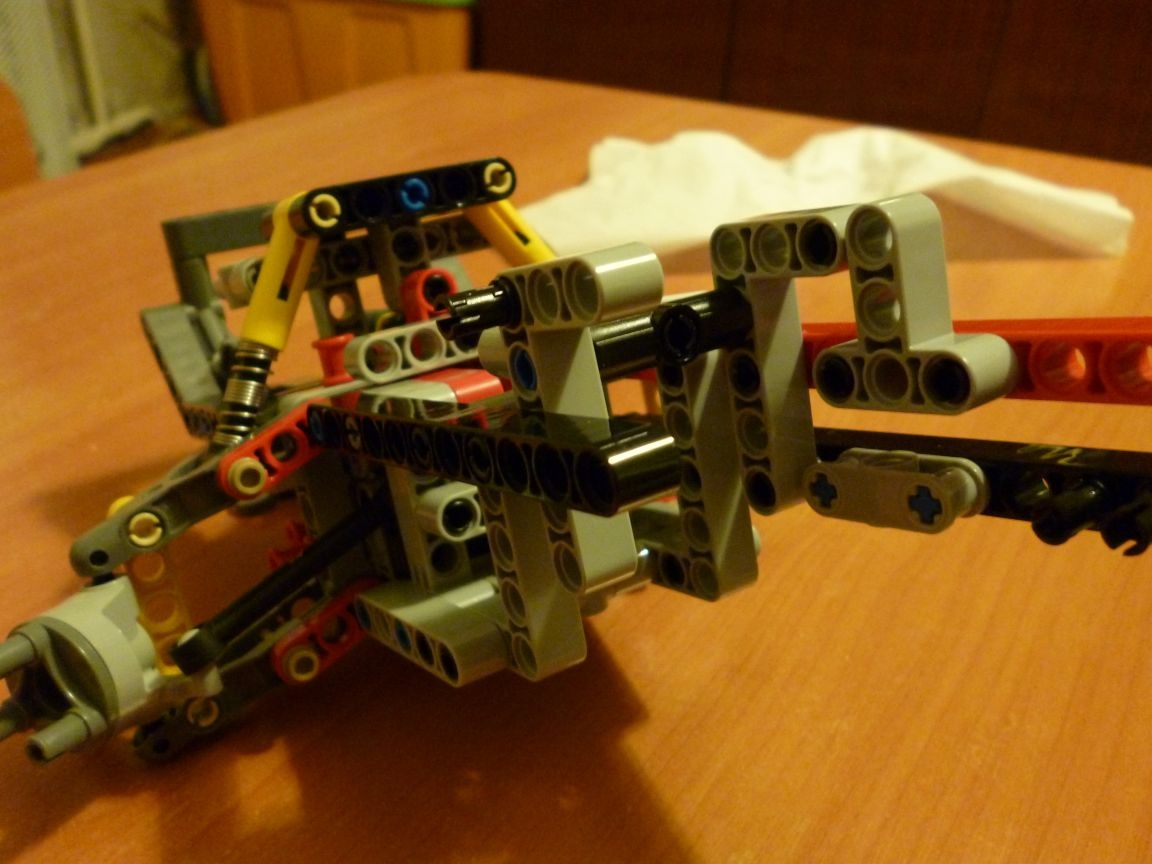
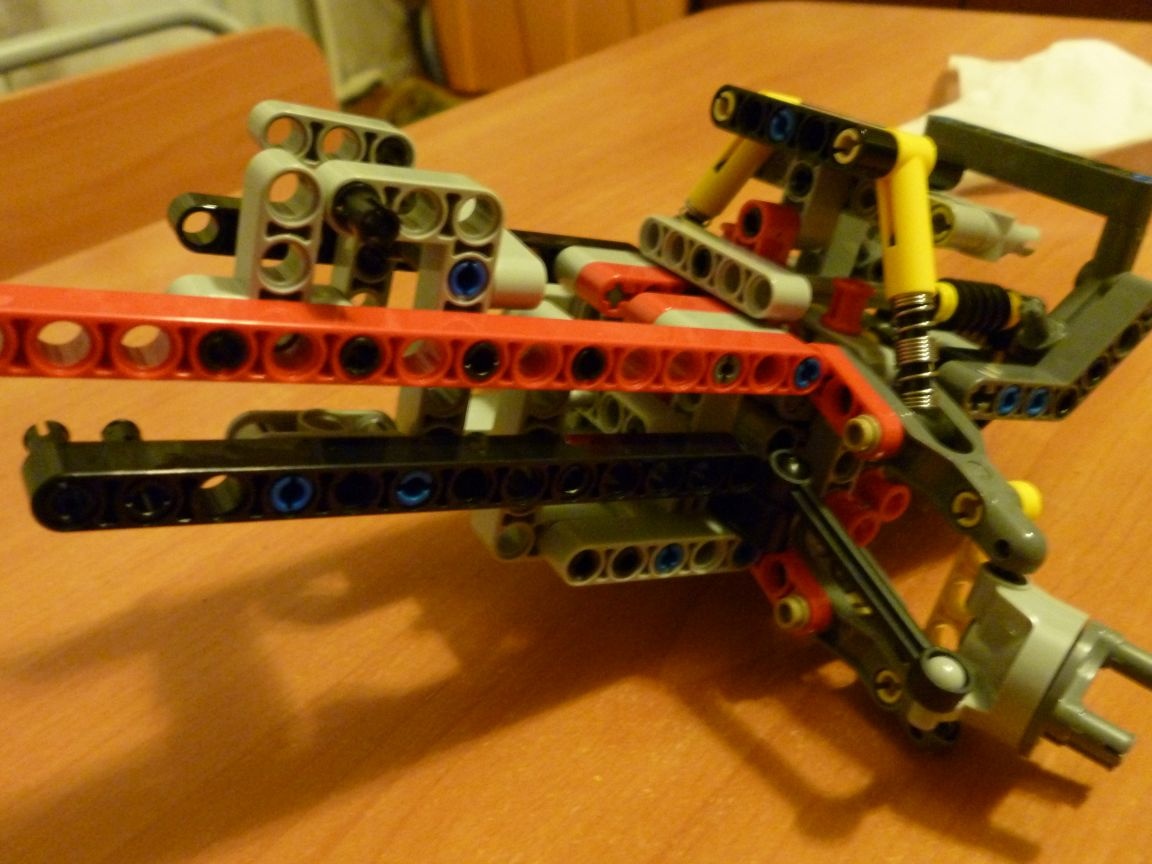

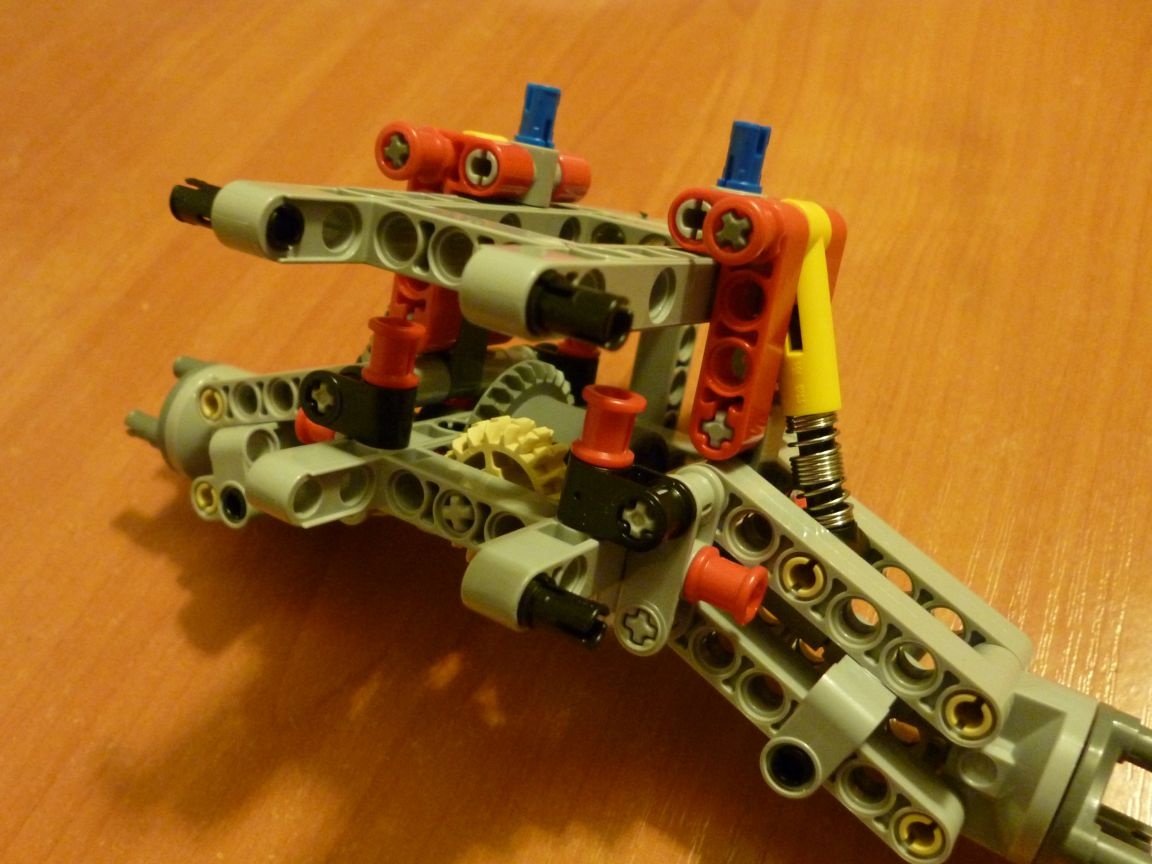
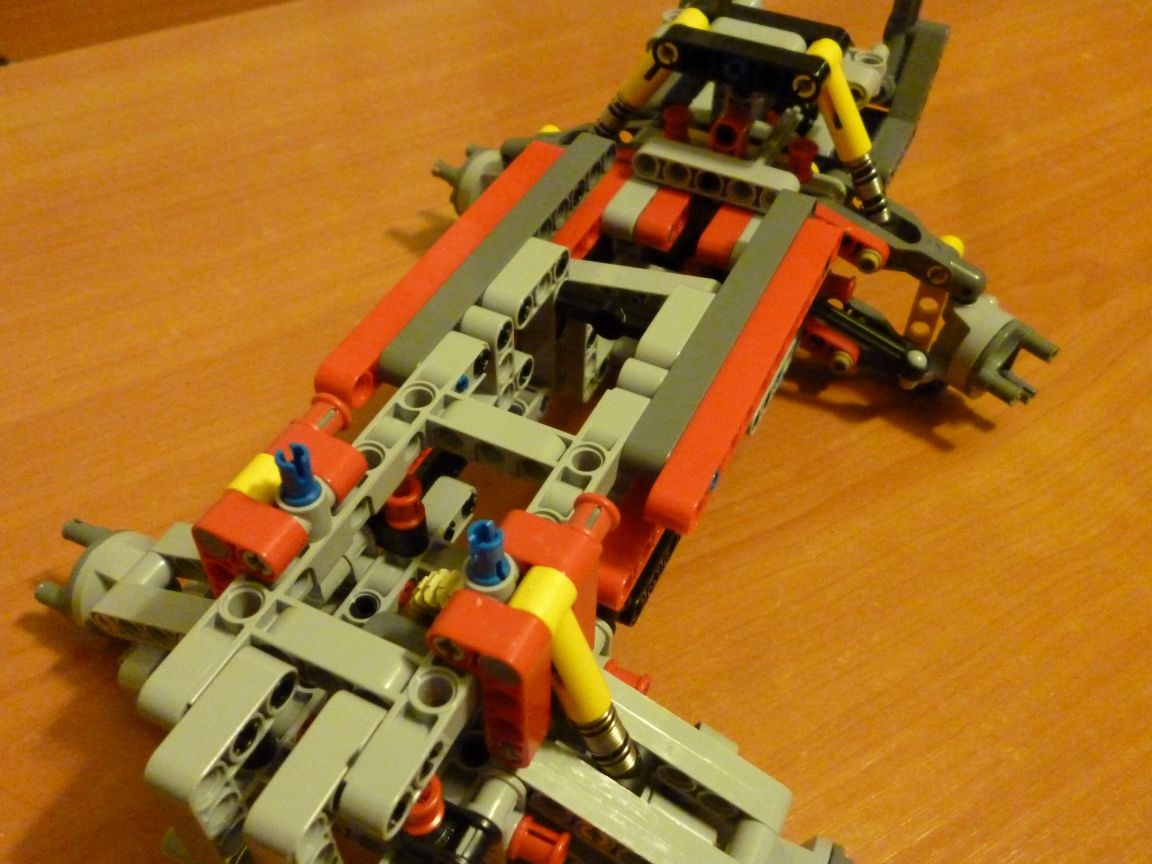
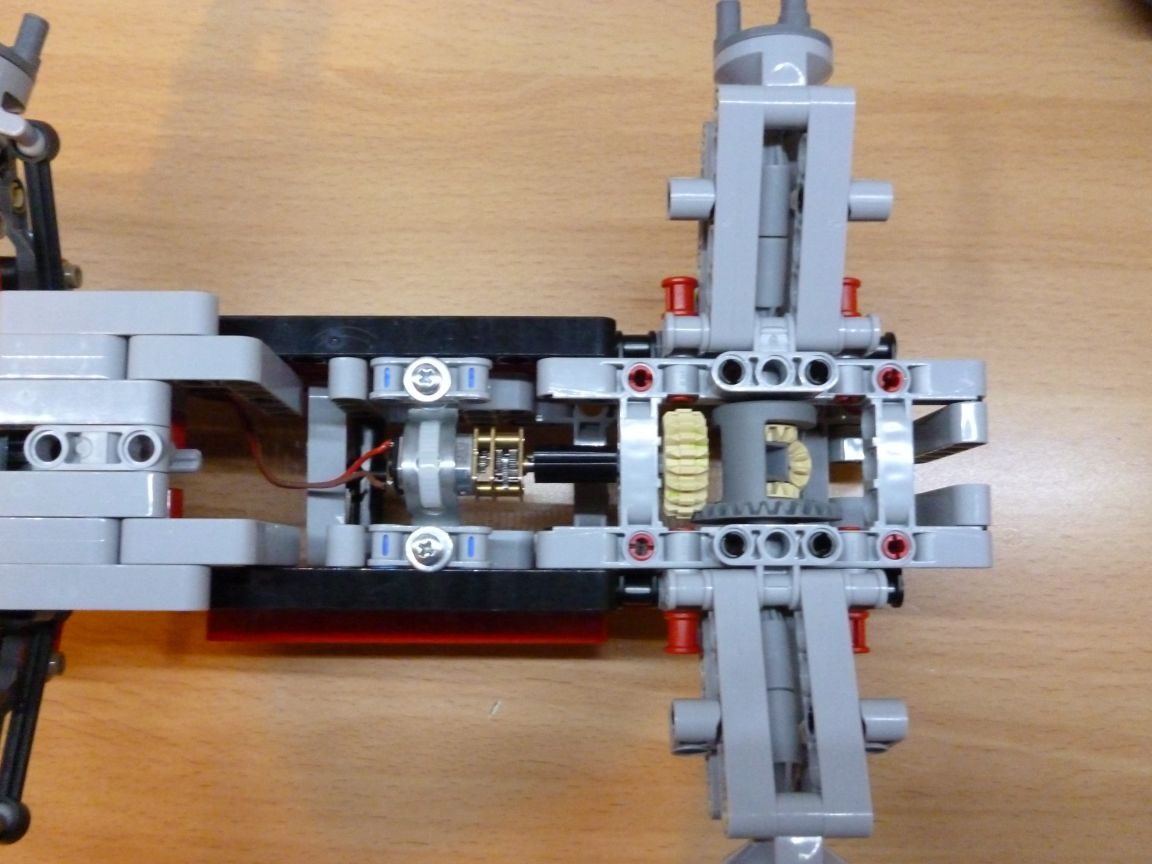
Langkah 3 memasang casis.
Kami menyambung kedua-dua bahagian seperti yang ditunjukkan dalam foto:

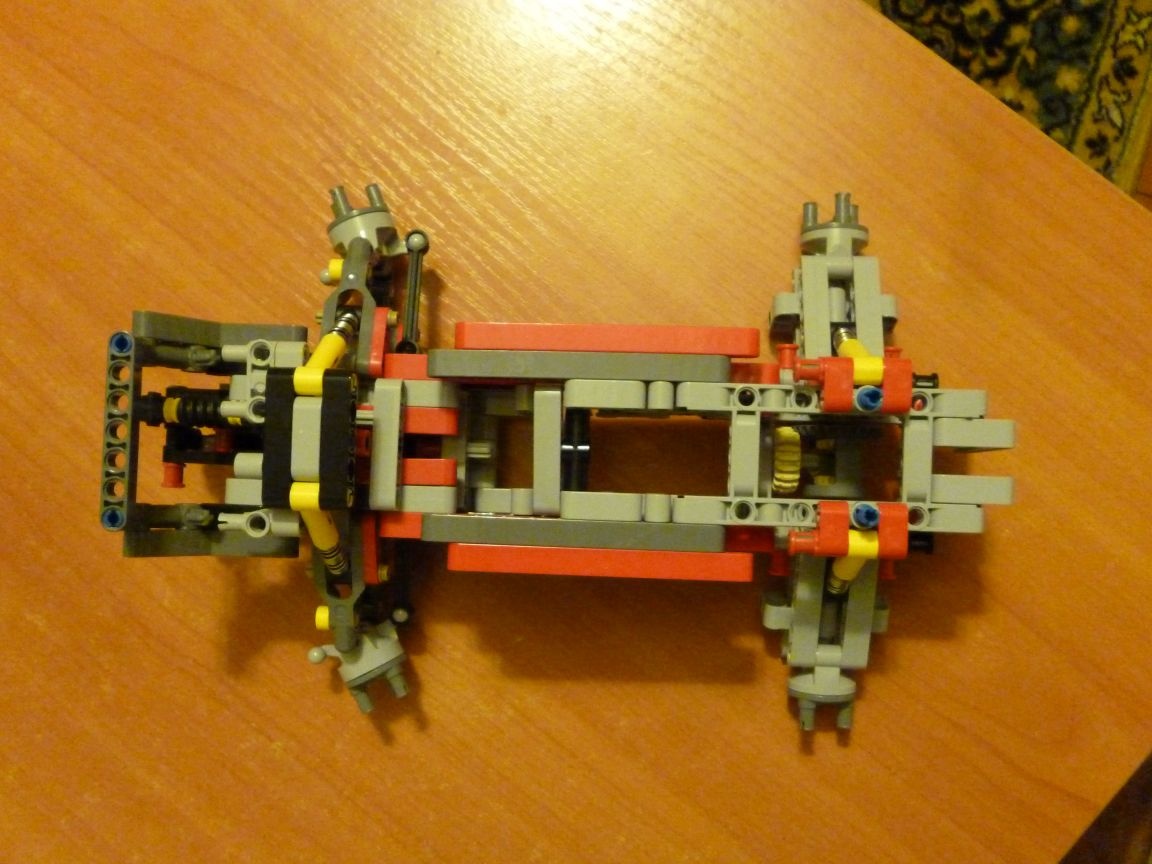
Saya menyelesaikan masalah menyambung gearmotor dengan bahagian-bahagian pereka seperti berikut: Saya meletakkan lengan yang menghubungkan pada paksi gearmotor dan memasukkan sekeping perlawanan untuk penetapan. Untuk memasang motor gear menggunakan plastik logam daripada pereka besi dan pengapit.
Ternyata perkara berikut:
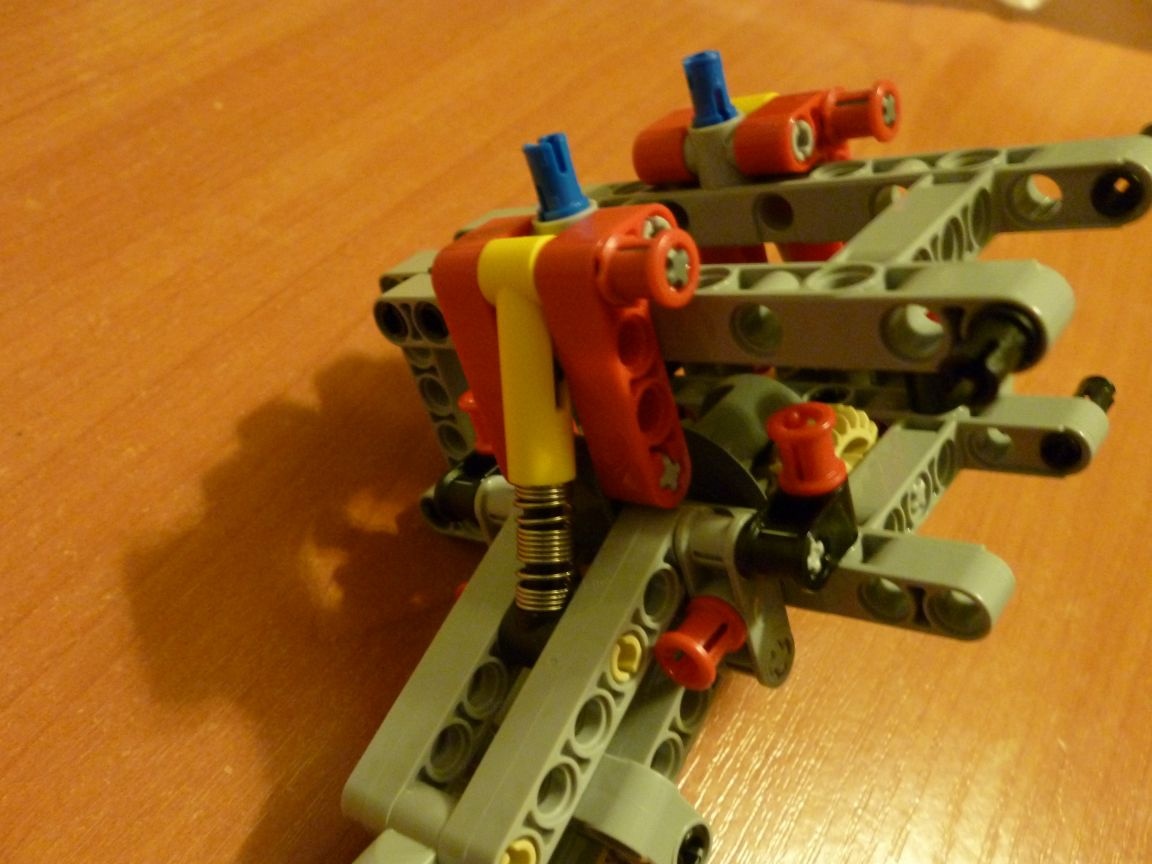
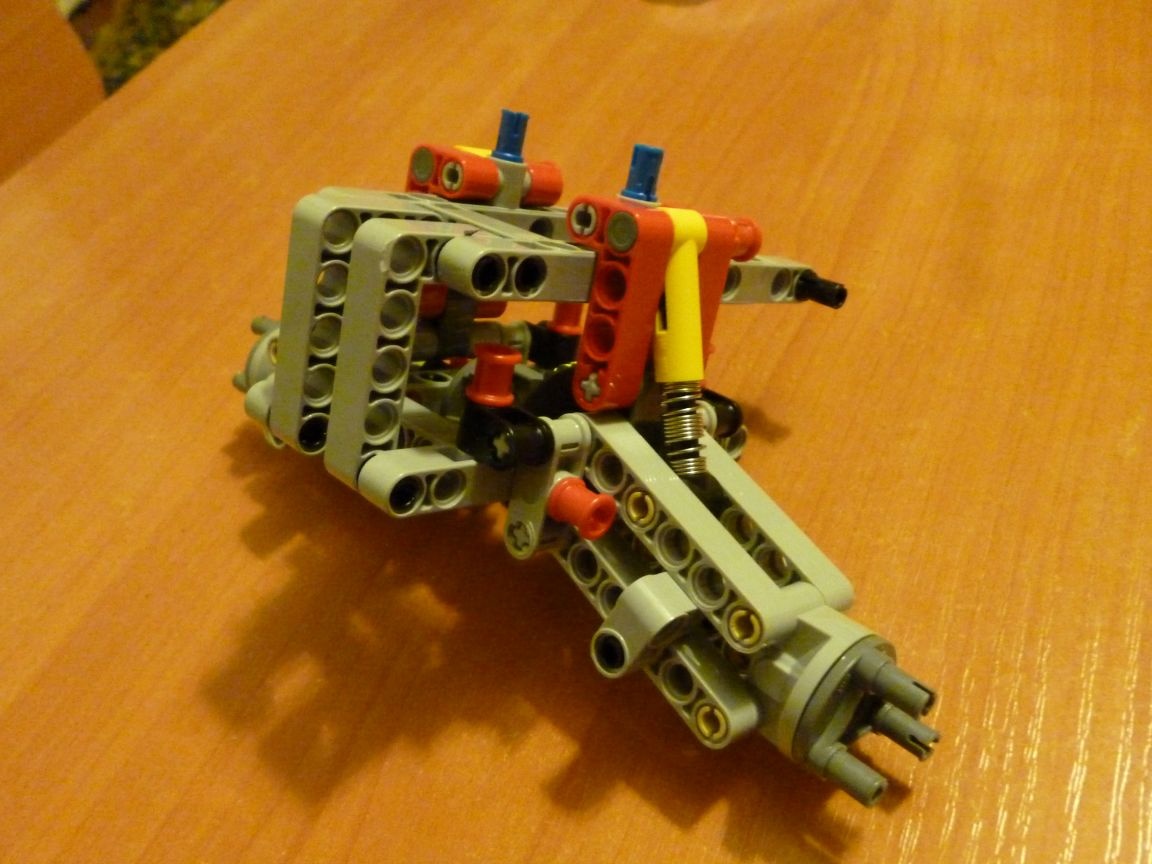
Gunung pada casis:
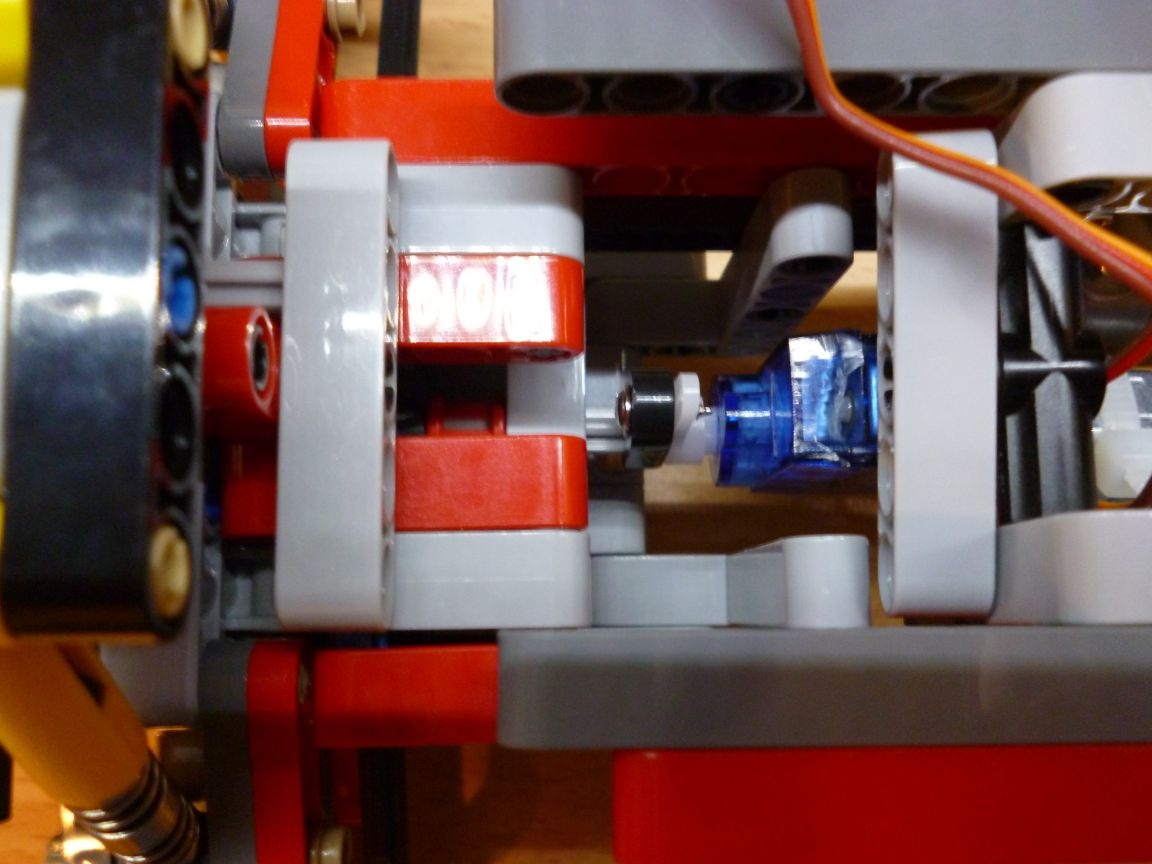
Untuk menjalankan penggiliran mengambil servo SG-90. Ia perlu berhati-hati supaya tidak menyentuh bahagian dalaman, melalui lubang dengan diameter 3.2 mm atau hanya dipotong dengan pisau perkeranian. Dan juga memotong bahagian-bahagian yang menonjol ("sayap" untuk mengikat). Kami memasukkan bolt ke lubang yang dibuat dan membetulkannya dengan kacang. Pada servo aci kita memakai tuas dengan bahagian yang kacau dari lego:
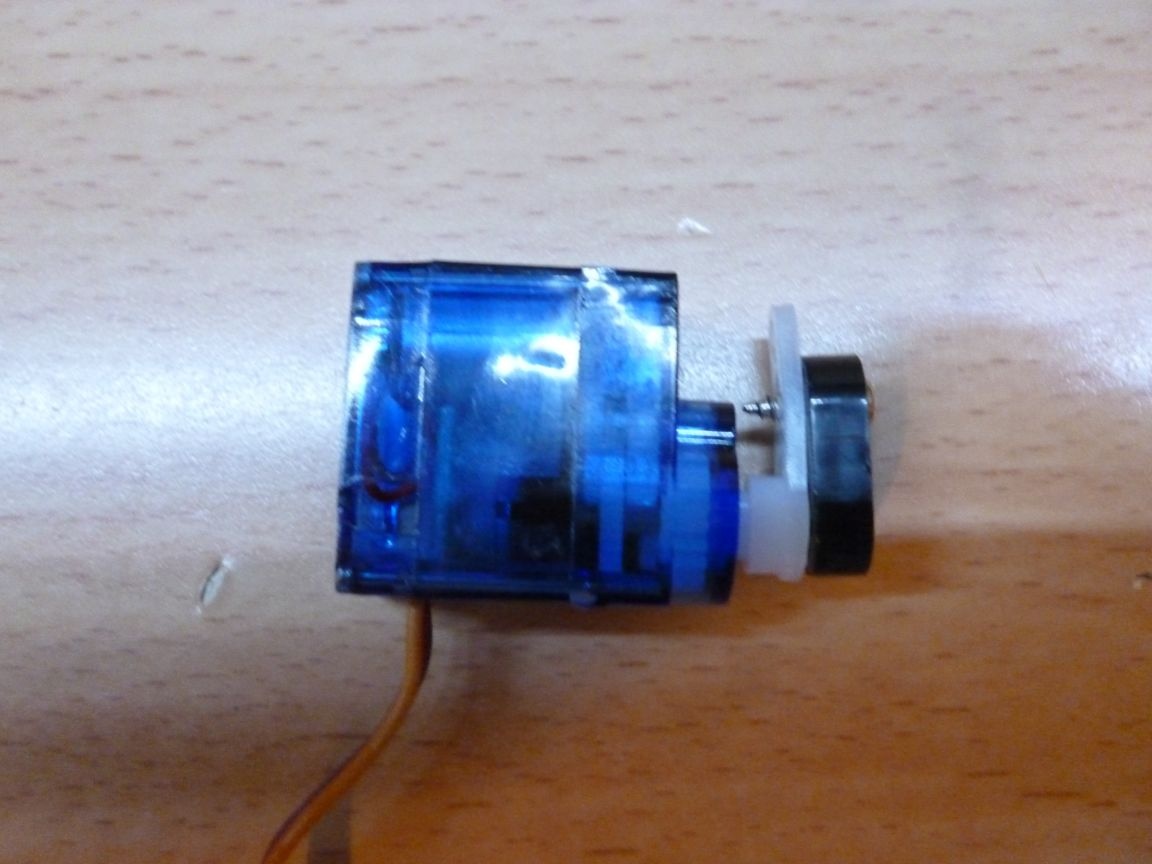
Pasang:
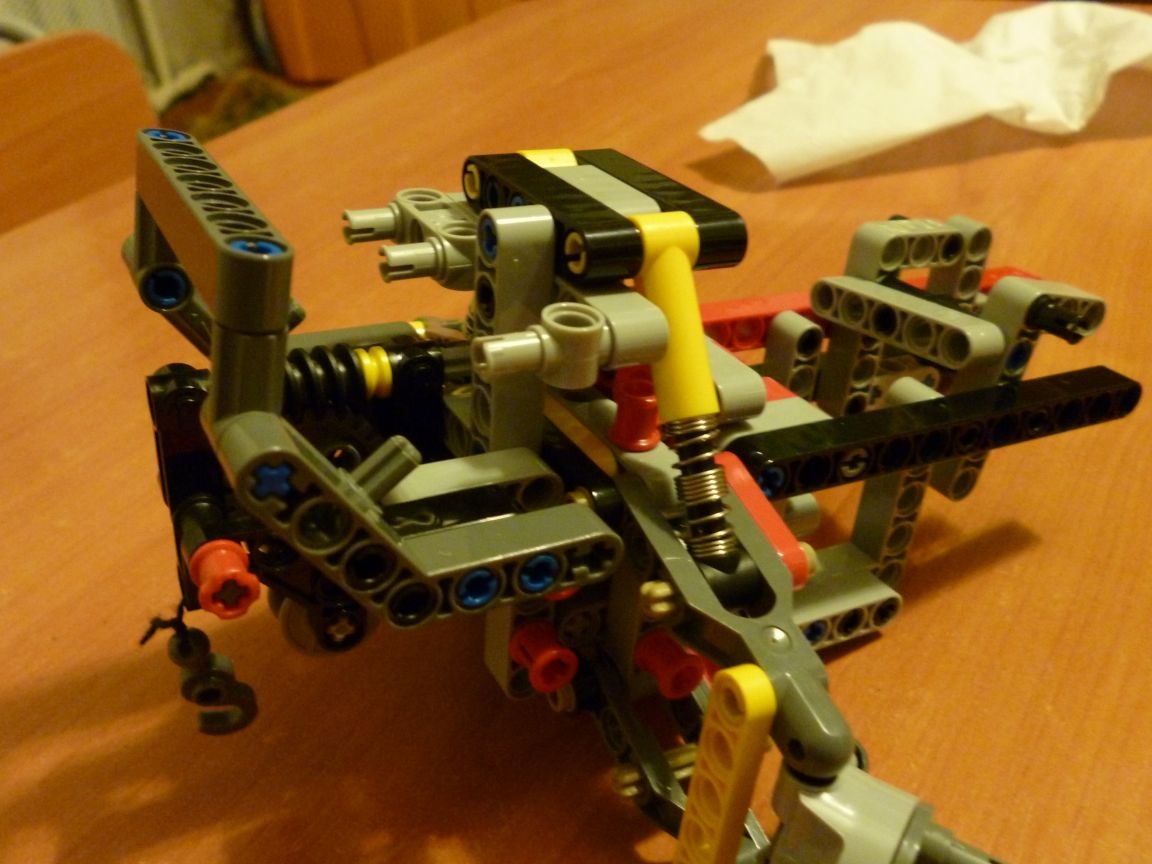
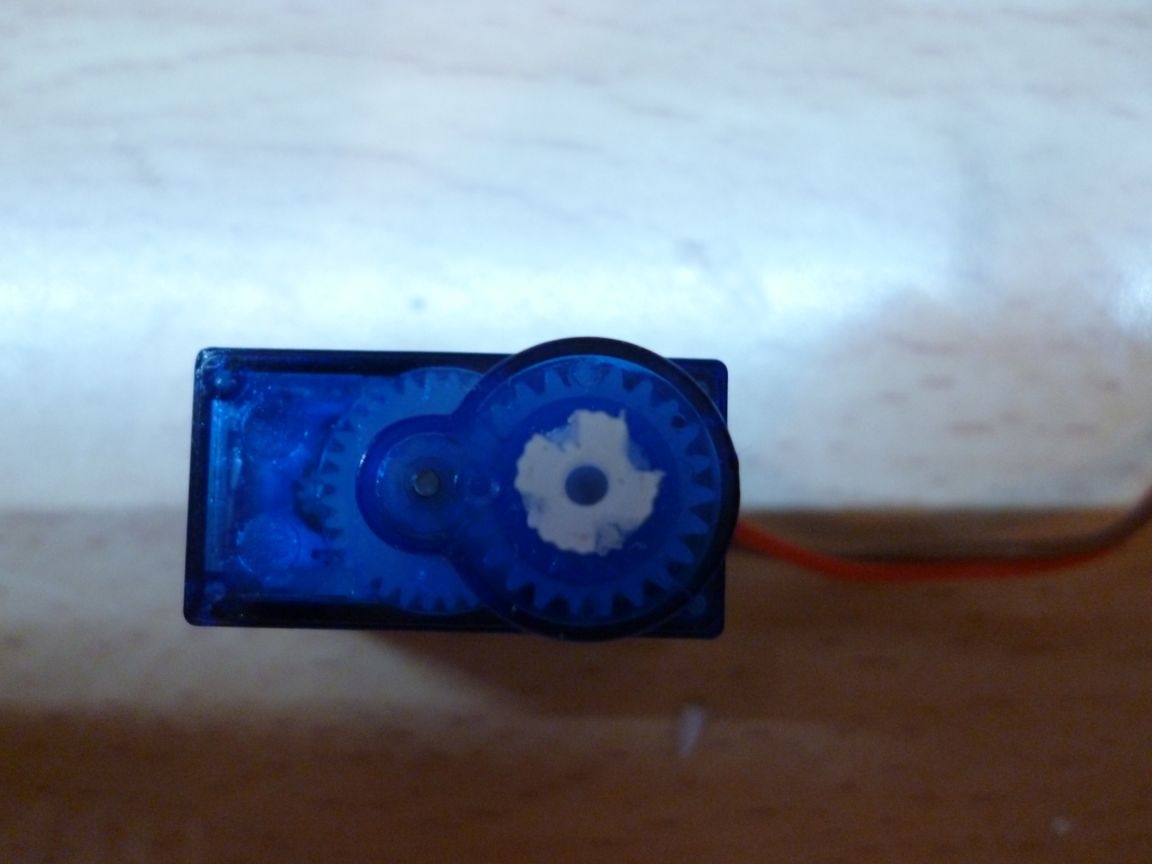
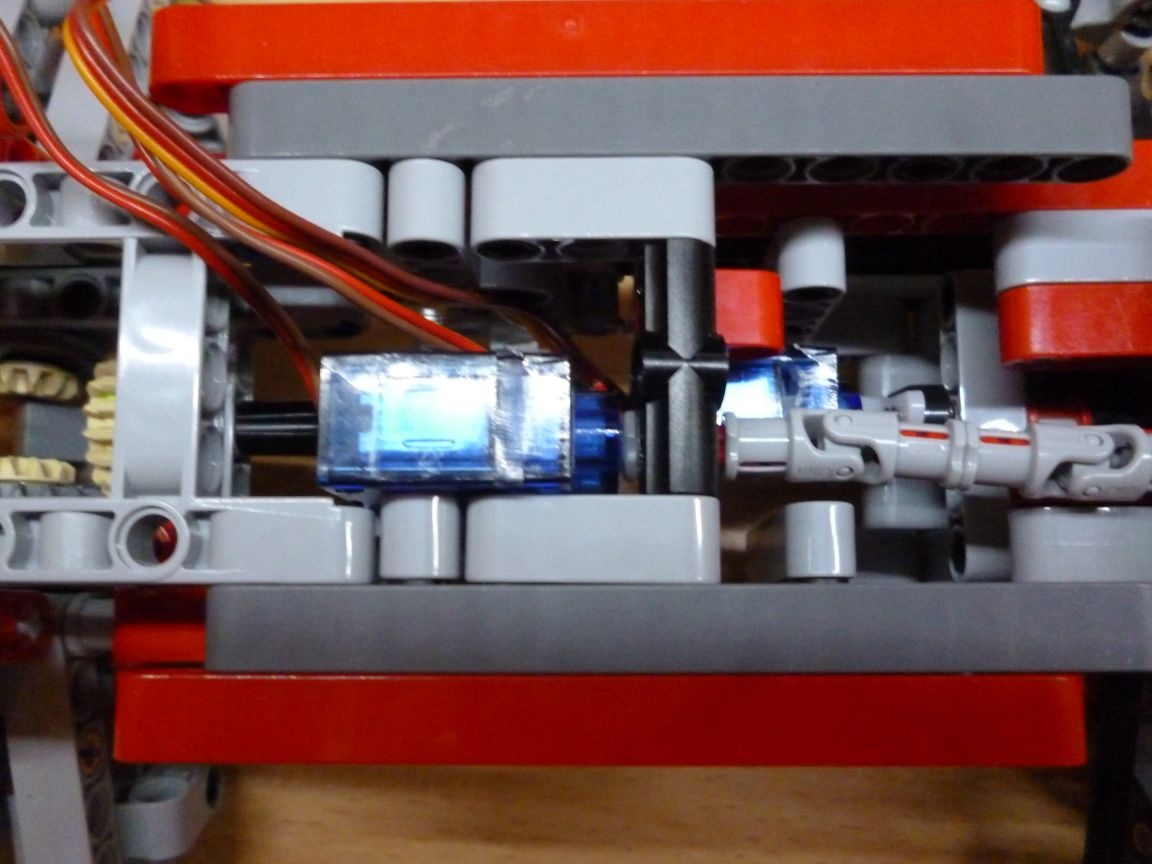
Kami akan menggunakan servo kedua untuk win. Kami melakukan perkara yang sama seperti yang pertama. Dan kini, ia perlu dimodenkan supaya ia berputar dengan bebas. Untuk melakukan ini, kami membongkar pemacu servo, keluarkan papan dan pateri wayar secara langsung ke motor. Kami mengambil gear utama dan memotong perhentian perjalanannya.Dan akhirnya, kami membuat slot dengan pisau perkeranian pada gear utama seperti dalam gambar:
Kami menyambung ke winch kami dan memakai casis:

Langkah 4 Menguruskan Pengawal
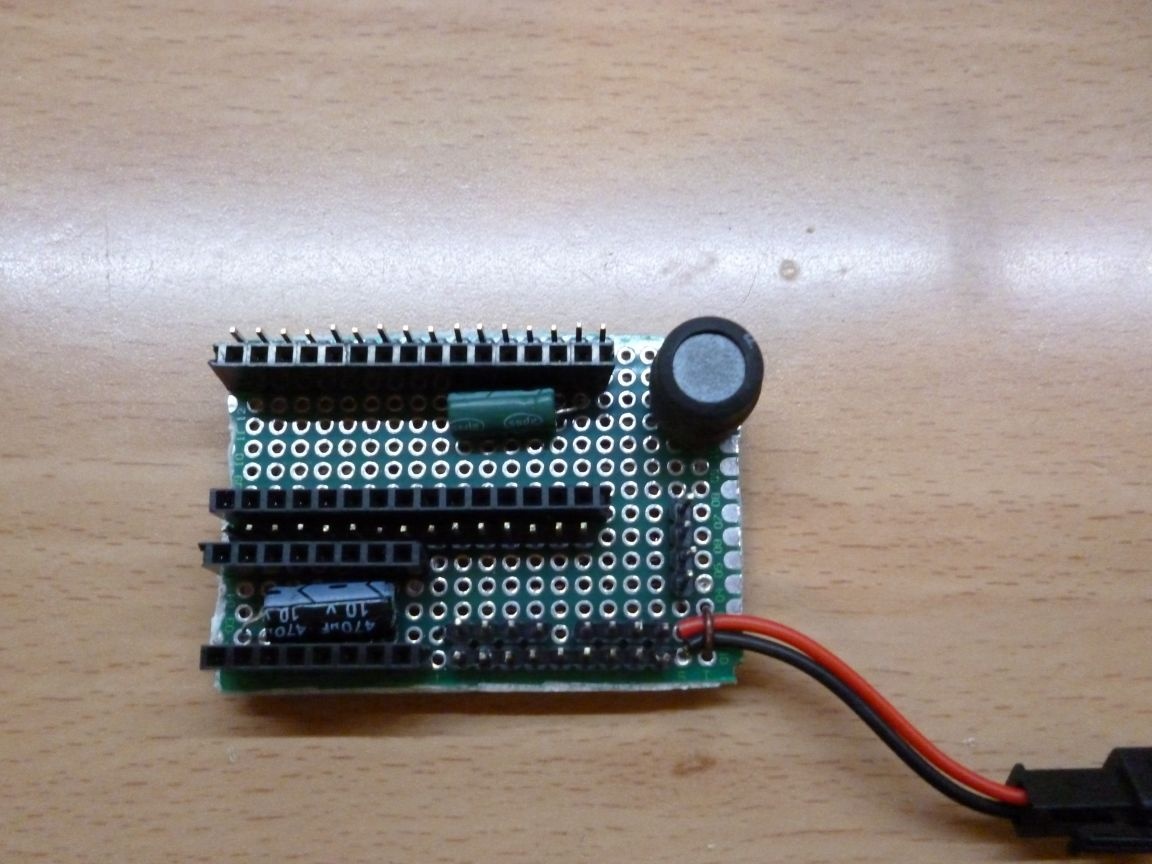
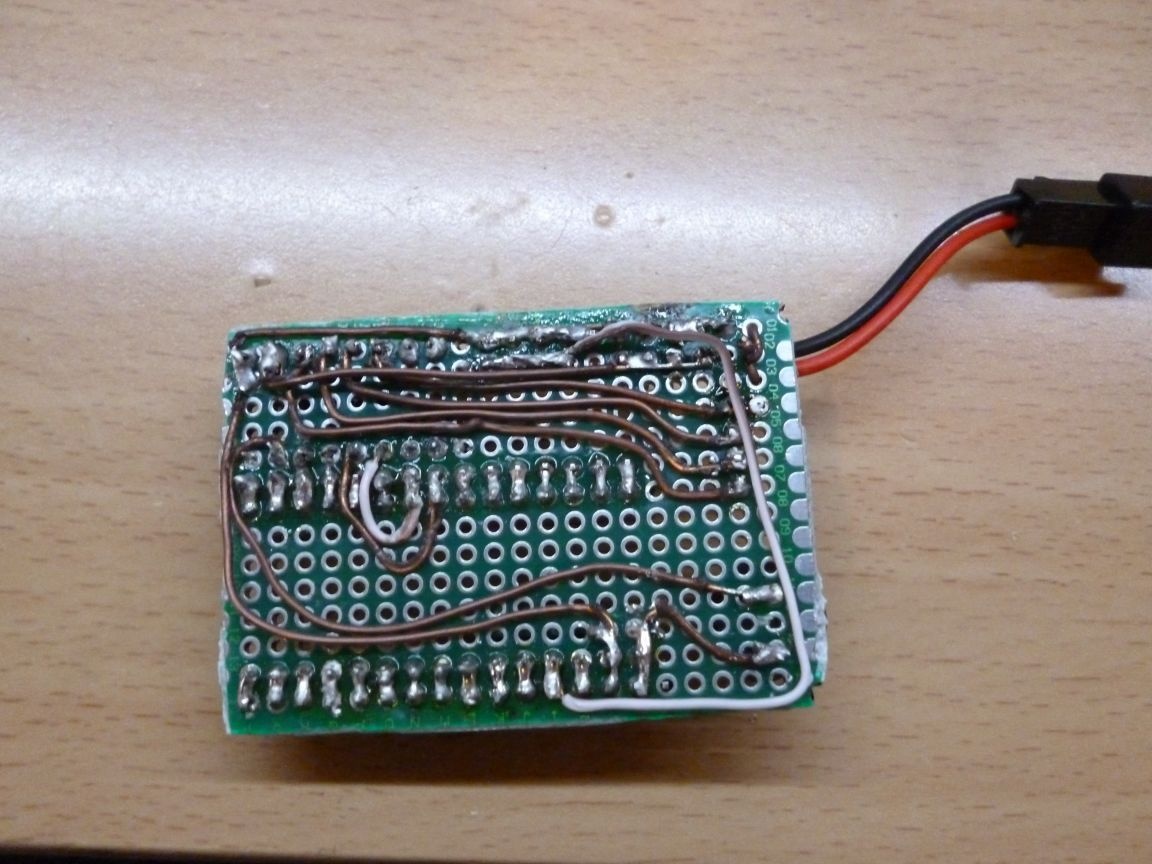
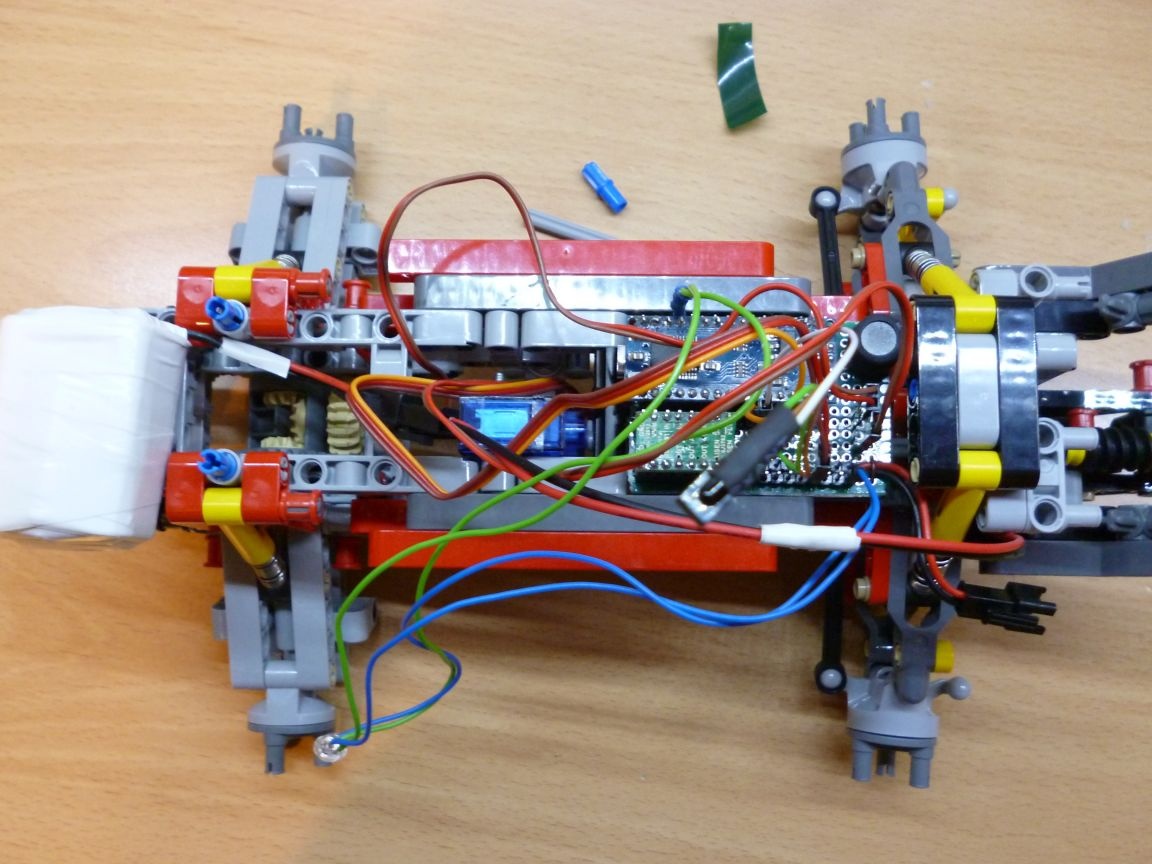
Untuk kawalan kami akan menggunakan penerima Arduino dan IR. Kami mengambil besi pematerian dan memasang berikut di papan litar:
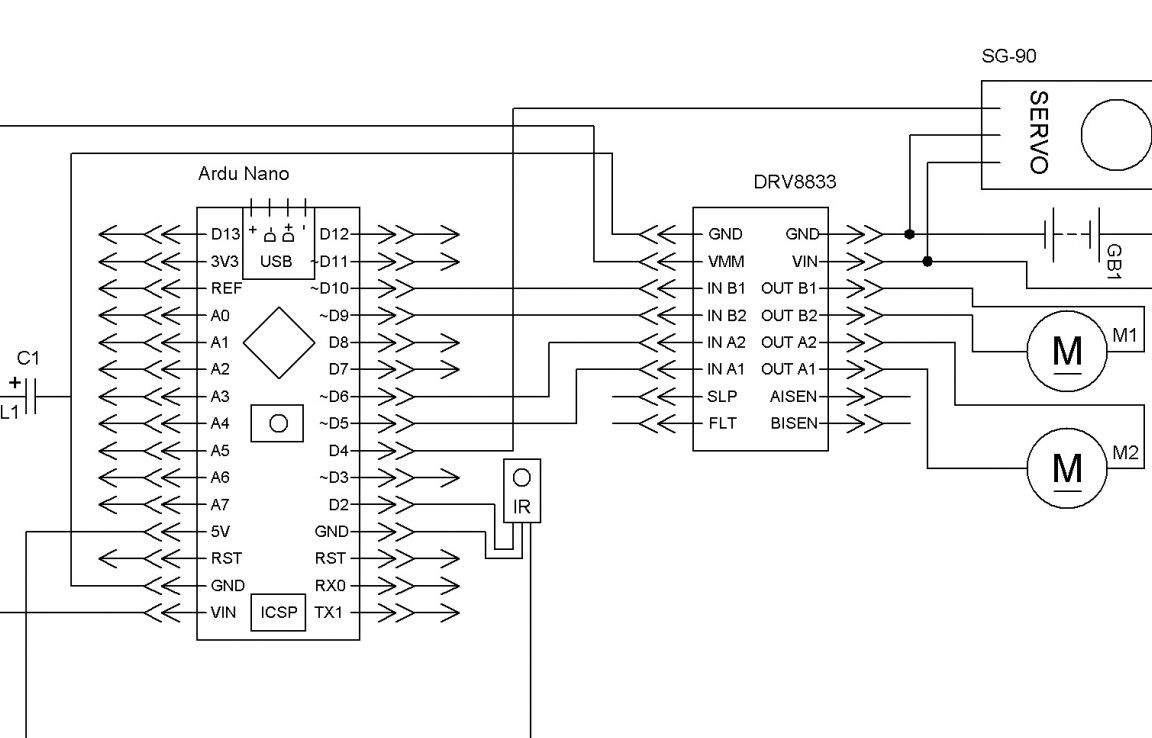
Saya terangkan: mana-mana kapasitor kuasa rendah, gegelung induktansi yang anda juga akan dapati, anda perlu menstabilkan voltan mikropengawal itu. Resistor dipilih untuk LED yang digunakan. Penerima IR atau TSOP boleh diambil dari mainan lama, atau dibeli di kedai radio. Sekiranya terdapat gangguan yang kuat, tambah kapasitor pada litar kuasa penerima IR.
Akibatnya, kami dapat:
Kami memasang Arduino Nano dan DRV 8833 di tempat mereka:
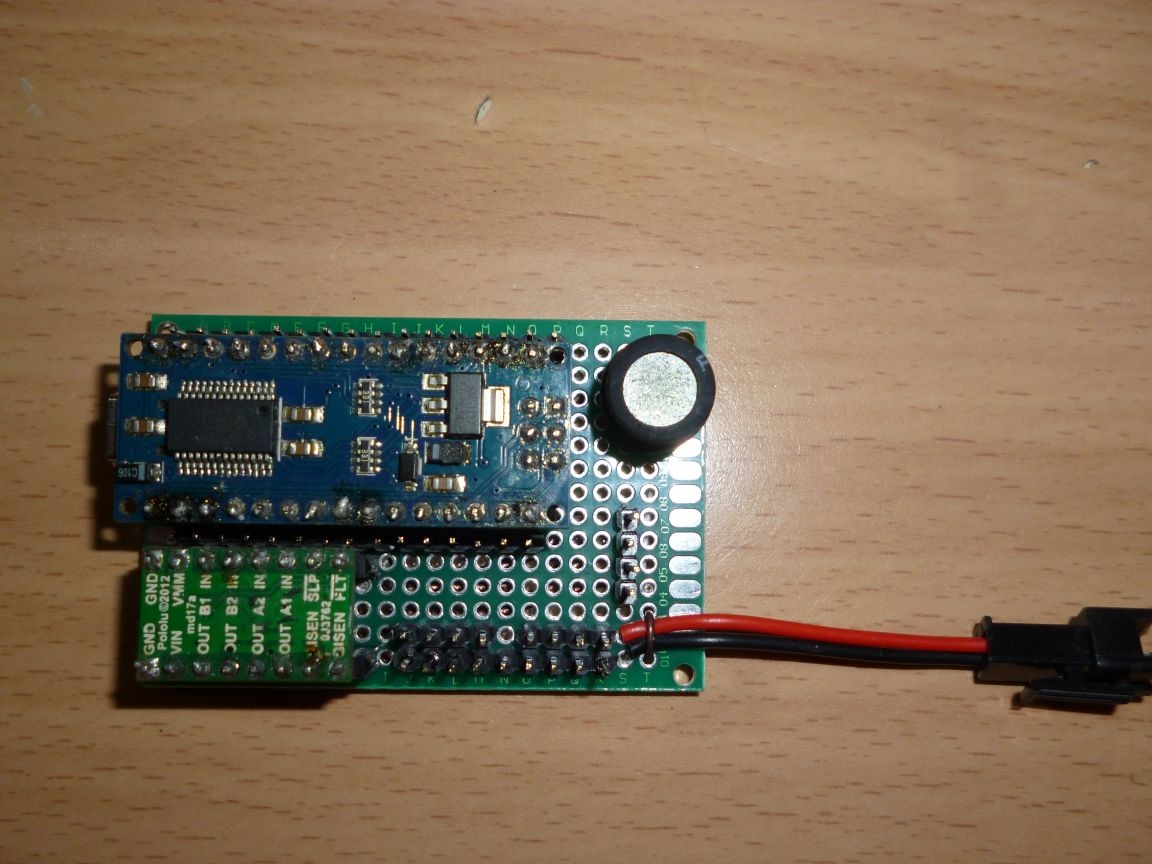
Dan letakkan papan pada casis:
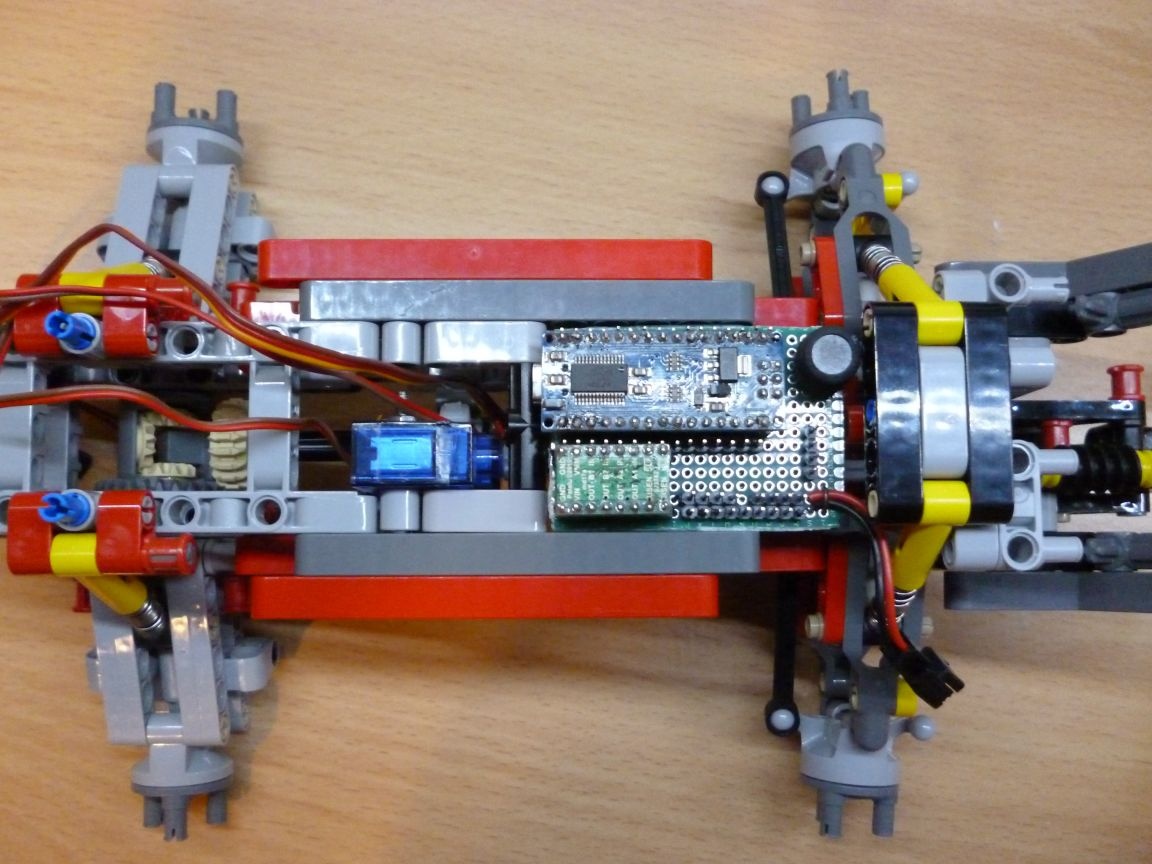
Bekalan kuasa - 6 bateri Ni-Mn 1.2v 1000mA. Adalah perlu untuk menyolder mereka dalam siri dan angin mereka dengan pita elektrik. Lem pada pita bermuka dua di bahagian belakang casis.
Kami menyambungkan keseluruhan struktur kami:
Langkah 5 Kabin
Kabin secara peribadi adalah penambahbaikan saya, tidak ada arahan yang sudah siap, jadi anda perlu mengambil dari gambar.



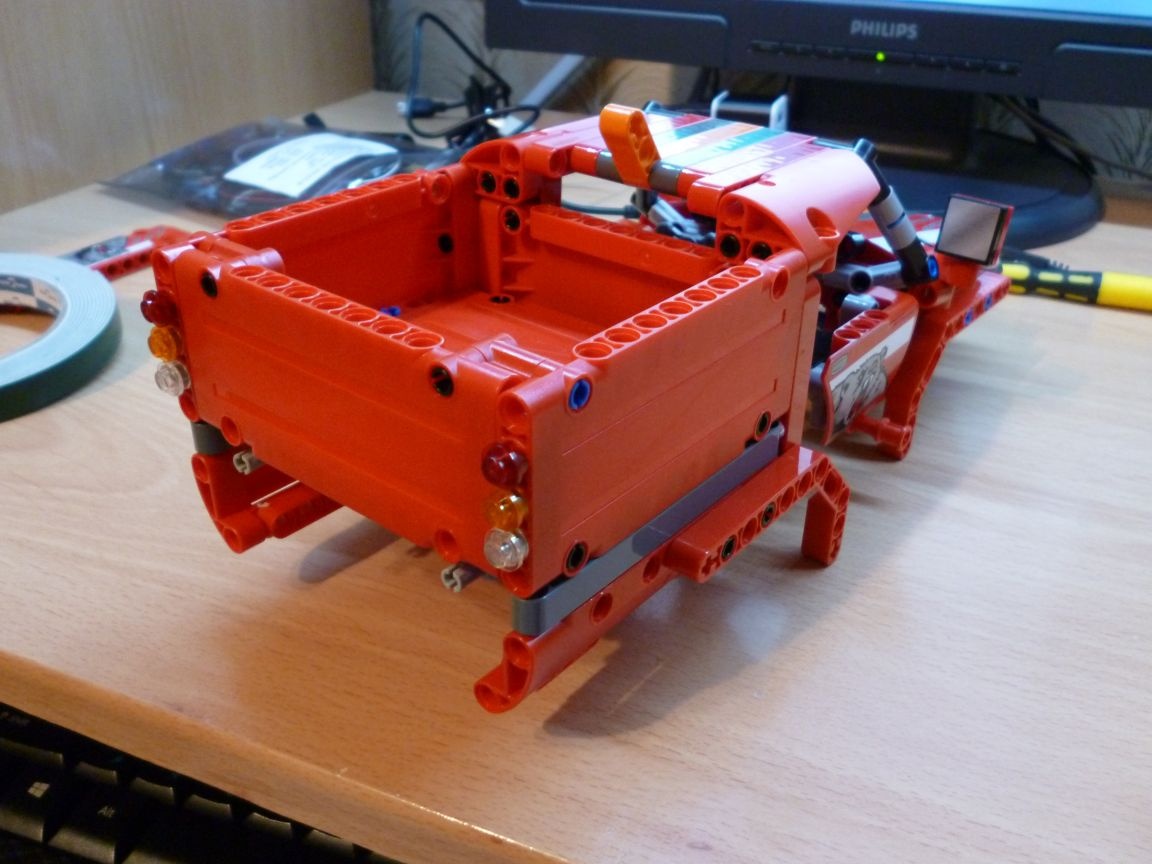
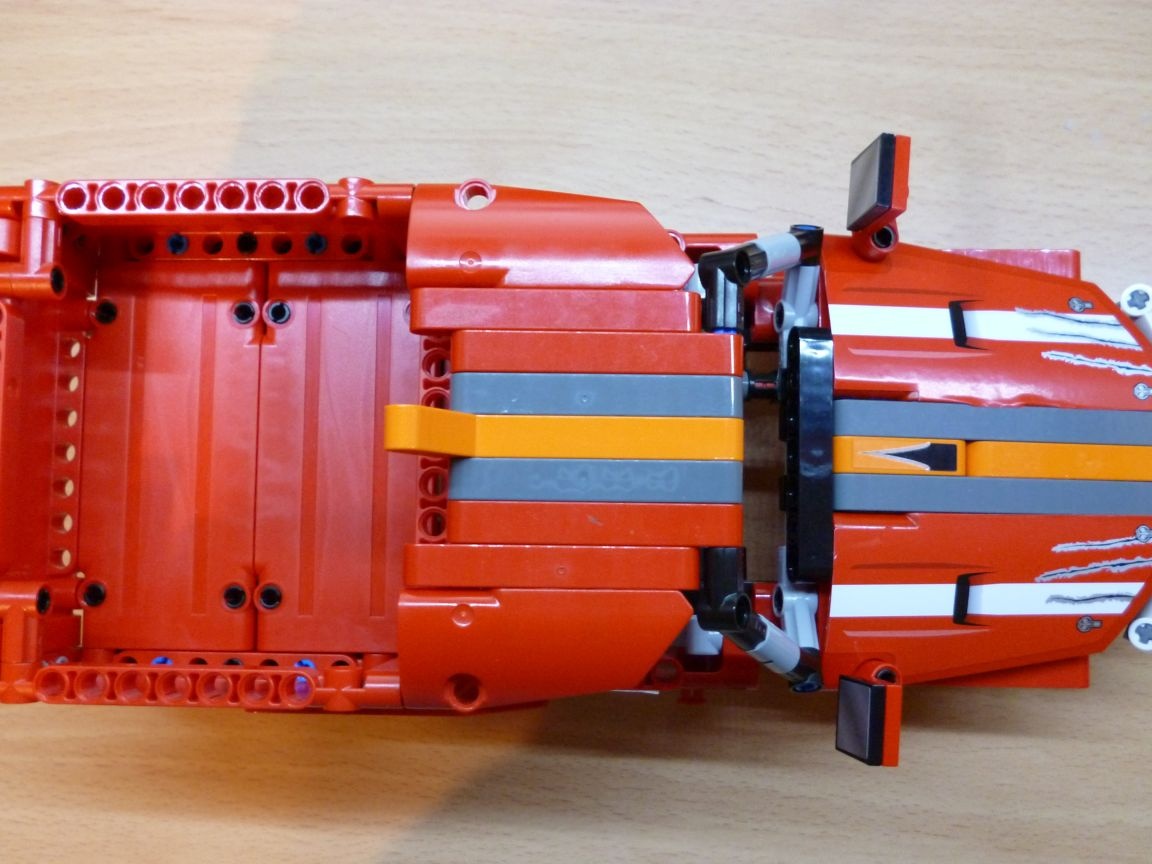
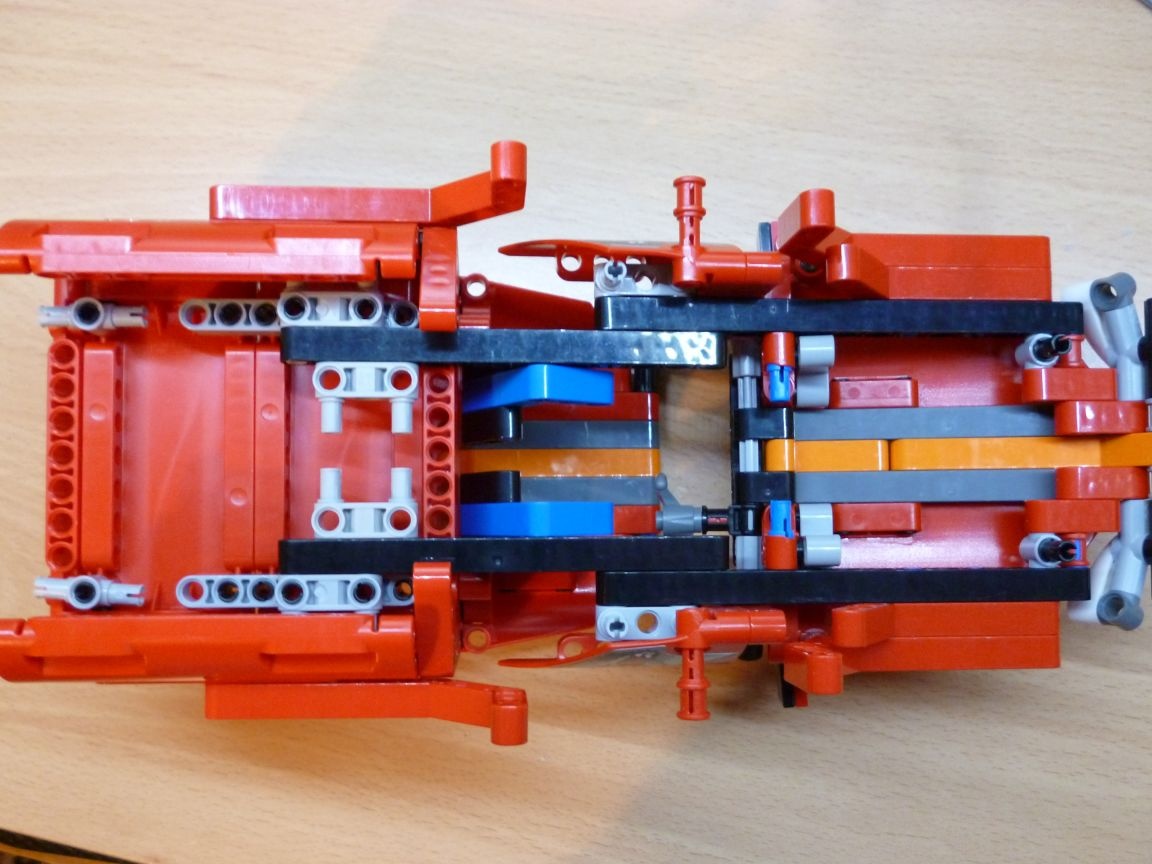
Anda boleh memasang versi anda sendiri, anda hanya perlu menyesuaikannya di bawah casis. Perkara utama di sini adalah untuk memadankan pemasangan dengan casis. Terdapat empat daripada mereka dan mereka kelihatan jelas dalam foto dari bahagian bawah teksi.
Langkah 6 firmware.
Hari ini, bagaimanapun, seperti biasa, saya program dalam IDE Arduino. Mula-mula anda perlu mengisi firmware saya dan melalui paparan terminal pada kod kawalan jauh yang akan anda gunakan. Anda boleh mengambil mana-mana jarak jauh IR, contohnya dari TV, pemain DVD atau memasang sendiri (saya mempunyai kawalan jauh buatan sendiri dari kayu bedik Sega). Dengan menekan butang, di terminal kita akan melihat kod butang yang ditekan, menuliskannya pada sekeping kertas. Kami melakukan ini dengan semua butang yang kami ingin program tindakan tersebut. Seterusnya, edit lakaran. Kami menuliskan kod kami ke dalamnya untuk tindakan yang diperlukan dan memancarkannya semula. Firmware ini dikonfigurasikan pada remote joystick Sega saya. Dalam proses bermain dengan mesin, saya dapati beberapa nuansa atau kesulitan. Adalah sukar untuk mencapai penerimaan IR arahan semasa pergerakan. Dan ia berlaku seperti ini: tekan panah ke hadapan, mesin menerima perintah untuk pergi, dan bergegas ke hadapan, mengeluarkan anak panah, tetapi ia tidak menerima arahan berhenti, dan terus memandu sehingga ia pecah atau terjebak, ia penuh dengan kerosakan. Sebahagiannya, masalah ini dapat diselesaikan dengan meningkatkan bilangan pengembalian menghantar arahan, namun, ini hanya mungkin jika menggunakan remote control sendiri. Tetapi saya akan memilih penyelesaian yang lebih kardinal - saya akan beralih menggunakan 433MHz pemancar - penerima. Saya akan menulis tentang perkara ini dalam artikel seterusnya.
Langkah 7 memakai roda.
Jadi, kita perlu meletakkan teksi di casis, memakai roda dan memeriksa SUV kami dalam tindakan.

