Hari ini saya mahu berkongsi seterusnya saya buatan sendiri. Ia berdasarkan kepada Lego dan Arduino. Untuk kawalan, kami akan menggunakan alat kawalan jauh dengan pemancar 433 MHz. Kali ini saya mahu membuat perlumbaan sebuah kereta. Teruskan:
- Lego Technic 42022
- Arduino Nano
- DRV 8833
- Servo SG-90
- 433 MHz modul komunikasi radio
- Motor reducer 200 rpm, dengan garis pusat aci 3 mm
- 2 LED
- 2 resistor 150 ohms
- Kapasitor 10v 1000uF
- 2 satu baris sisir PLS-40
- 2 penyambung PBS-20
- Induktor 68mkGn
- 6 NI-Mn 1.2v 1000mA bateri
- Penyambung ayah-ibu dua pin ke wayar
- Homutik
- Wayar warna yang berbeza
- solder
- Rosin
- besi pematerian
- Bolt 3x40 dan kacang dan pencuci untuk mereka
- Bolt 3x20
Langkah 1 berhimpun kes itu.
Ia adalah perlu untuk memasang mesin kami mengikut arahan Lego 42022 pilihan kedua dengan beberapa perbaikan. Kami melakukan semua tindakan dari halaman 3 hingga 6. Kami tidak memerlukan mekanisme gear. Enjin Lego juga tidak perlu dipasang. Walau bagaimanapun, anda memerlukan pemasangan enjin pada halaman 14-19, kecuali gear dan aci. Seterusnya, kami mengumpulkan semua dari halaman 20 hingga 74, kecuali untuk tuas pada halaman 25.
Langkah 2 mengurutkan badan.
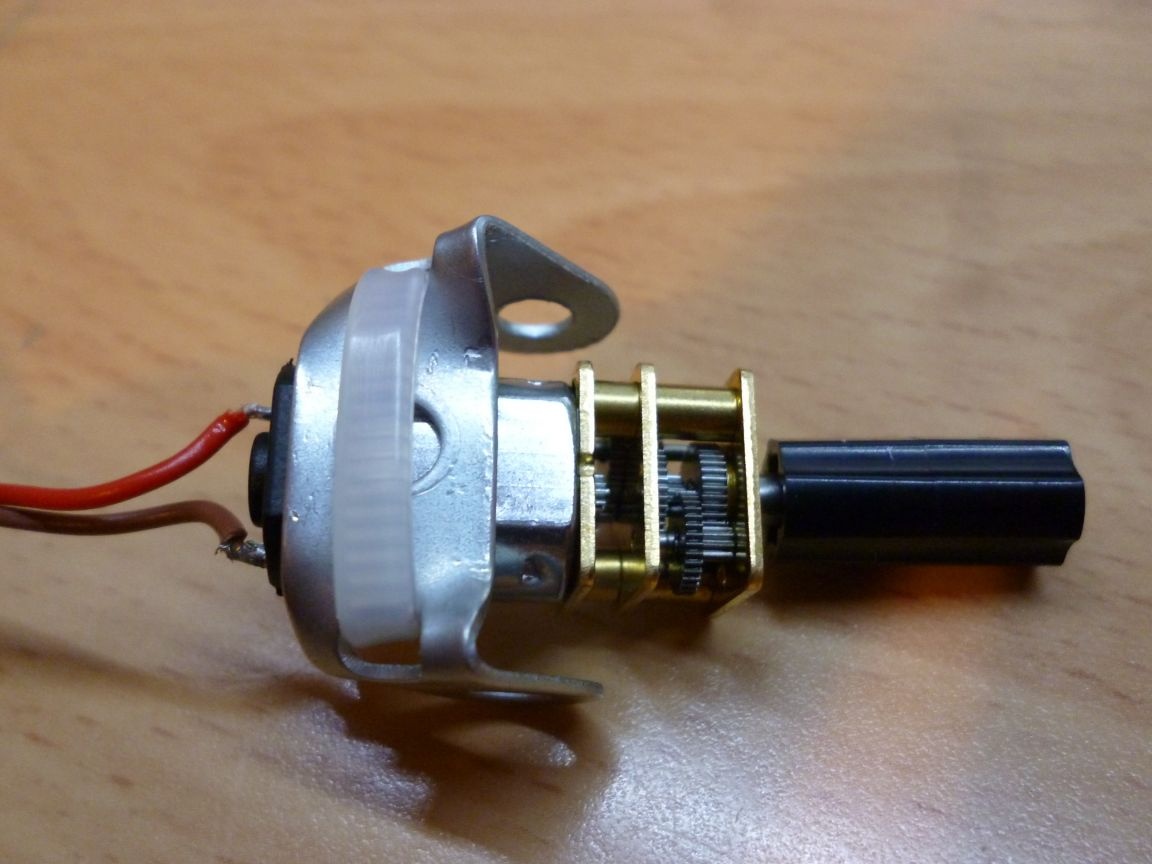
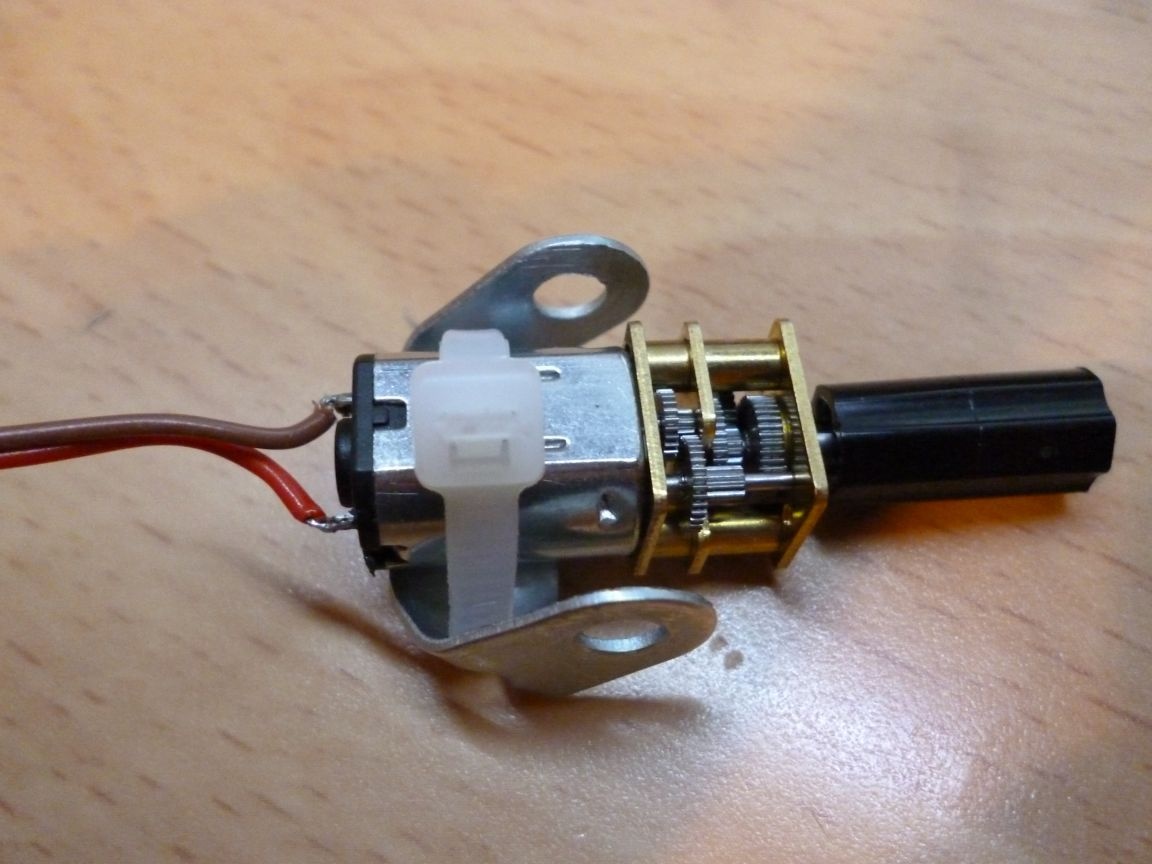
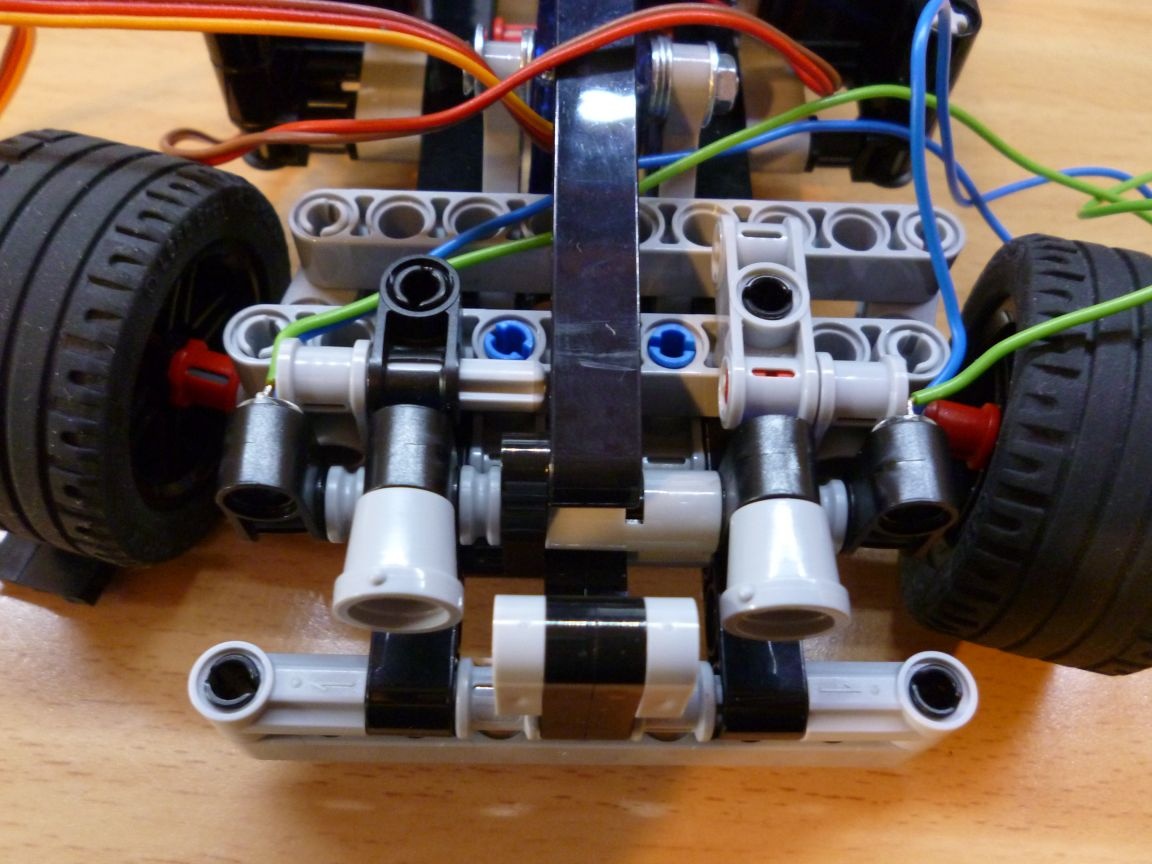
Menggerakkan kami model itu akan ada motor gear dengan kelajuan 200 rpm. Boleh digunakan dengan nisbah gear yang berbeza. Tetapi, pada pandangan saya, ini adalah pilihan terbaik. Pada 100 rpm - terlalu perlahan, 300 rpm - tidak ada kuasa yang mencukupi dan enjinnya sangat panas. Pada aci gearmotor, letakkan pada "Legovskaya" yang menyambungkan lengan dan selamatkannya dengan memutar perlawanan dengan trim. Untuk membaiki motor kita pada model, adalah perlu untuk membengkokkan bahagian dari pembina logam dengan huruf "P" dan pasangkan motor gear ke plat dengan pengapit. Hasilnya adalah sebagai berikut:
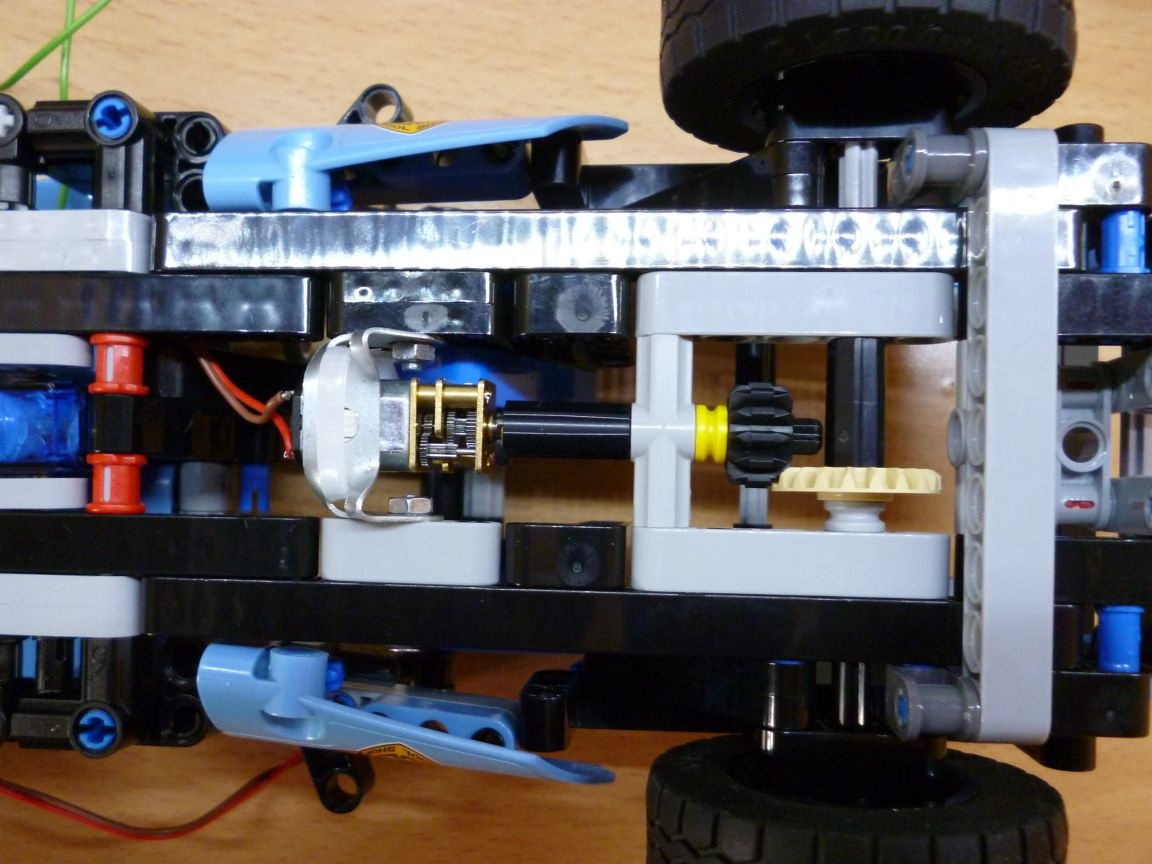
Dengan bantuan bolt 3x20, kami memasang motor kami kepada model. Jangan ketatkan terlalu banyak! Jika tidak, anda boleh merosakkan bahagian-bahagian pembina Lego. Mengenai model, ia kelihatan seperti ini:
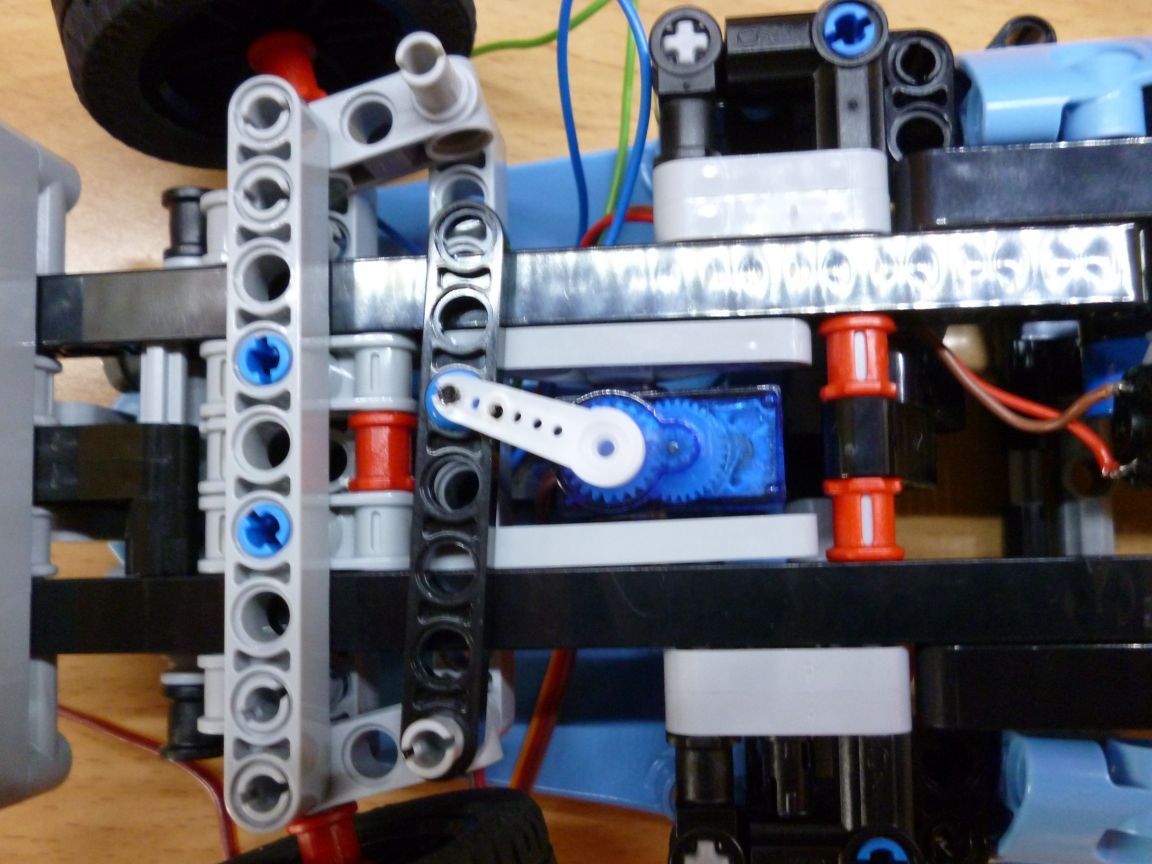
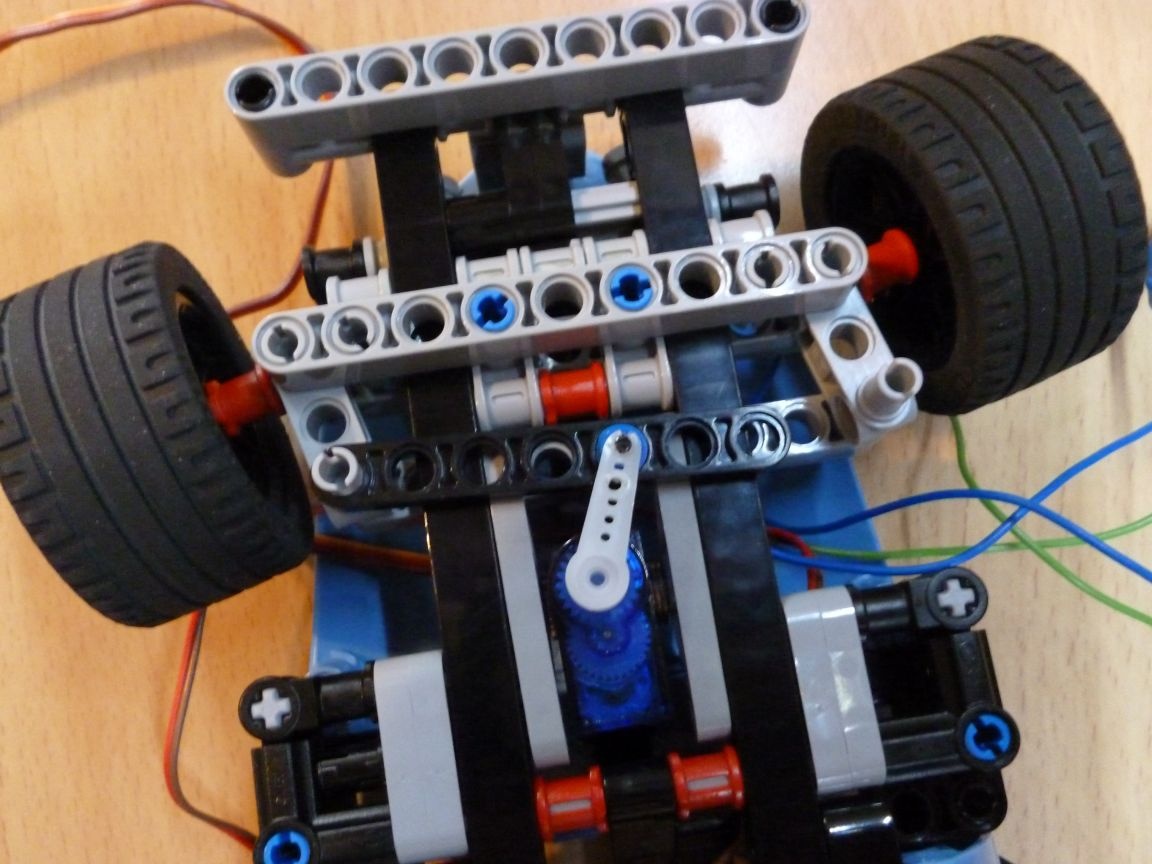
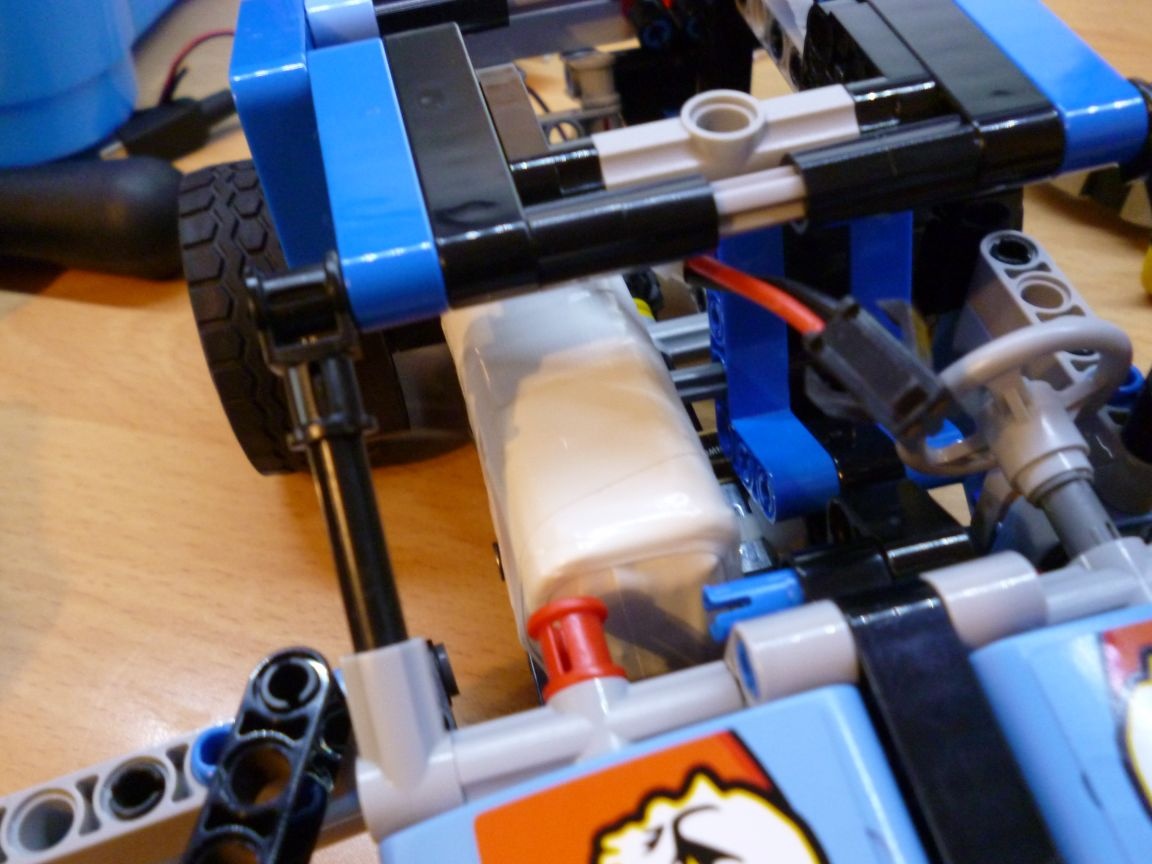
Untuk membuat gilirannya, ambil servo sedikit diubahsuai SG-90. Kes ini mesti digerakkan dengan berhati-hati agar tidak menyentuh bahagian dalaman, melalui lubang dengan diameter 3.2 mm atau hanya dipotong dengan pisau alat tulis.

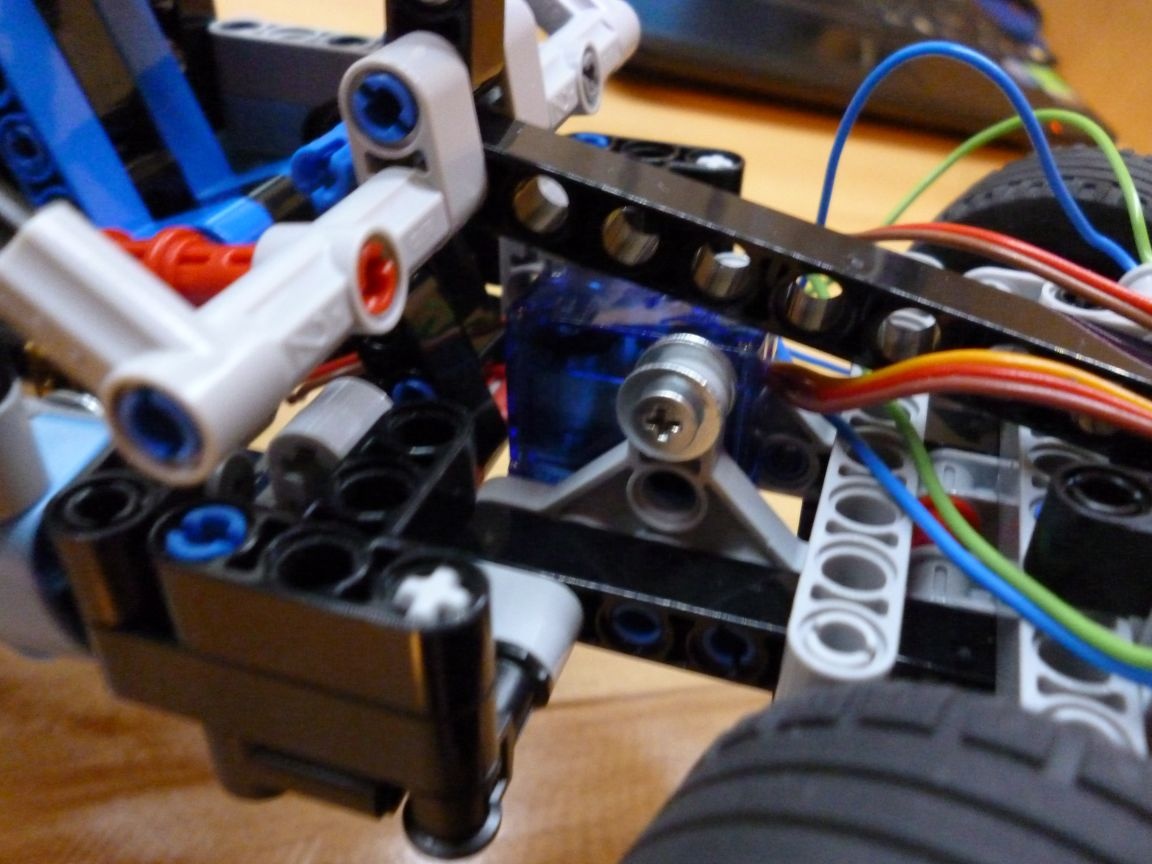
Kami memasukkan bolt ke dalam lubang yang dibuat, dan di tepi kami meletakkan pada pinggan segi tiga dan diperbaiki dengan kacang. Kami meletakkan tuil pada aci servo dan mengikat bahagian ke tuil Lego. Pada mesin taip, ia kelihatan seperti ini:
Langkah 3 adalah juruelektrik.
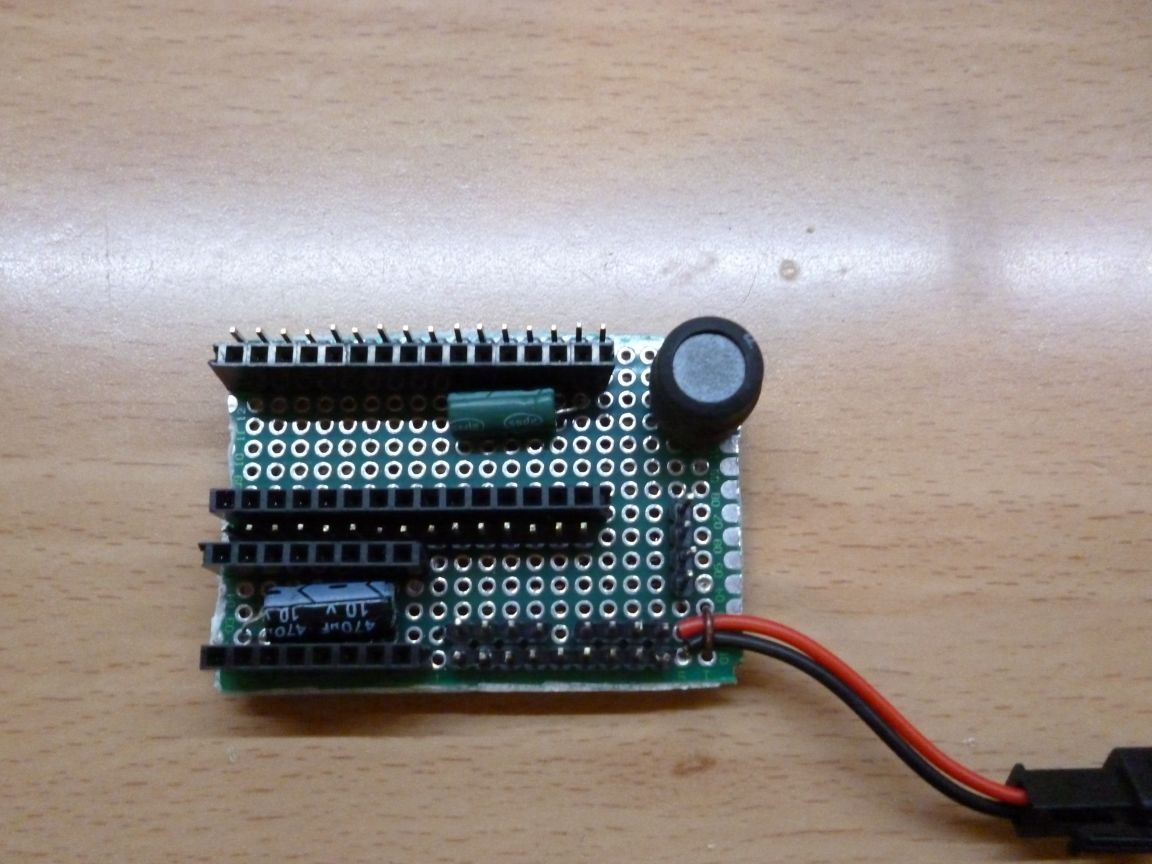
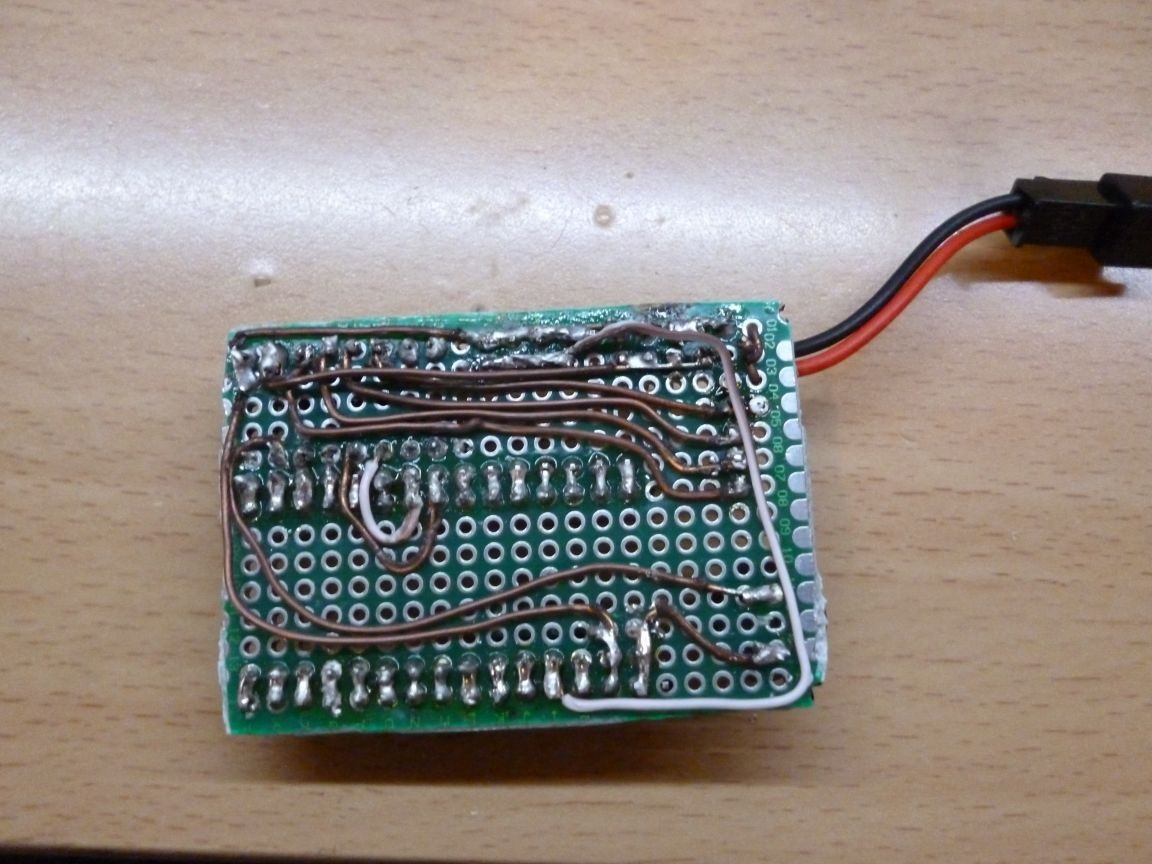
Pematerian besi di tangan dan pergi. Semua elektrik boleh dipasang hanya dengan menyambung wayar pemasangan. Tetapi ini menyusahkan, kerana ia memerlukan banyak ruang. Di samping itu, terdapat kebarangkalian yang tinggi untuk hubungan berkualiti rendah. Oleh itu, adalah lebih baik untuk menyebarkan segalanya di papan litar mengikut skema berikut:
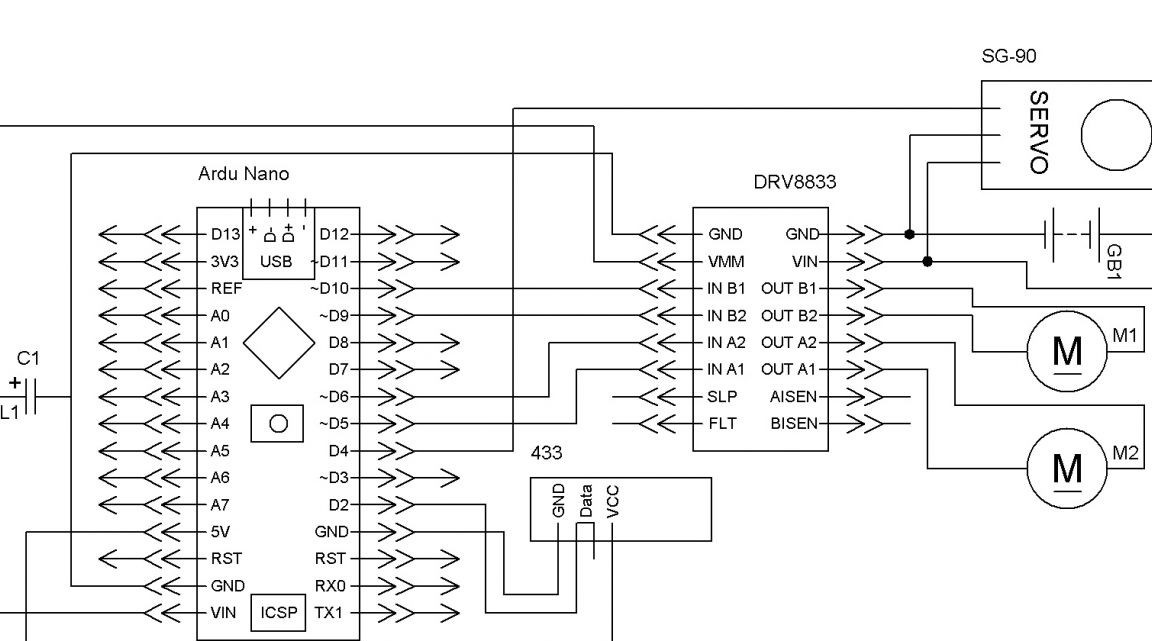
Saya akan membawa kejelasan sedikit: anda boleh mengambil mana-mana kapasitor kuasa rendah, anda juga boleh mencari induktor apa-apa jenis, ini perlu untuk menstabilkan voltan mikropengawal itu. Antena mesti disalurkan kepada penerima. Saya mendapat yang berikut:
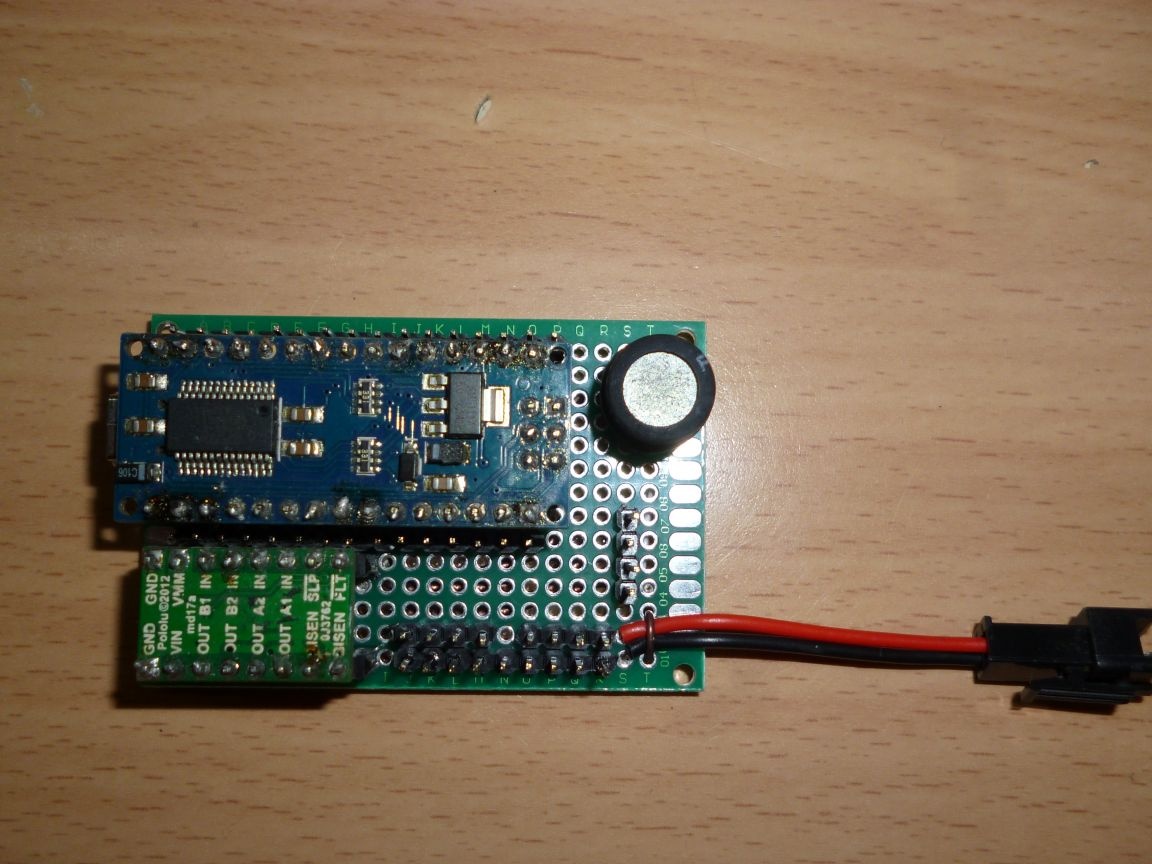
Kami meletakkan Arduino Nano dan DRV 8833 di tempat mereka:
Untuk kuasa kami akan menggunakan 6 Ni-Mn 1.2v 1000mA bateri, solder dalam siri dan luka dengan pita elektrik. Letakkannya pada kerusi penumpang pita pelekat bermuka dua.

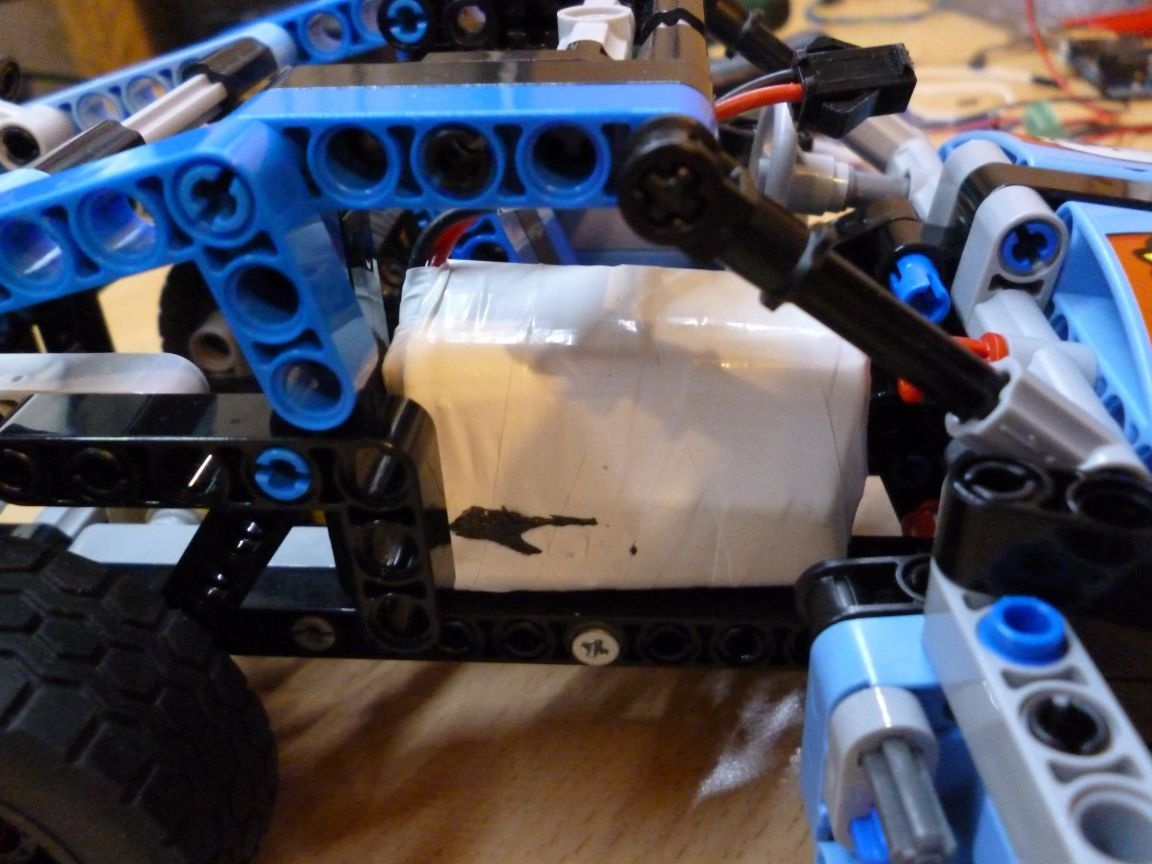
Kami menyambung semuanya mengikut skema dan memasang di belakang mesin. Anda juga boleh menambah beberapa LED. Letakkannya di lampu dan sambungkan ke pin 14 (A2).
Langkah 4 firmware.
Untuk menulis firmware, saya menggunakan Arduino IDE. Versi semasa pada masa penulisan ialah 1.8.1. Ia mudah untuk melaksanakan protokol komunikasi menggunakan modul 433 MHz menggunakan perpustakaan rc-switch-2.52. Anda perlu memuat turun dan menambahnya ke folder "pustaka" Arduino IDE.
Kami menyambung Arduino dan flash dengan firmware berikut:
Untuk menguji prestasi model kami, kami memerlukan papan kedua Arduino. Ia perlu menyambungkan pemancar radio 433 MHz ke papan kedua. Pemancar disambungkan seperti berikut:
VCC (pemancar) hingga 5+ (Arduino),
GND kepada GND,
DATA kepada D10.
Tulis skrip SendDemo yang diubahsuai di sana. Ia ada dalam contoh di perpustakaan yang kami pasang, dan berfungsi untuk menghantar arahan. Sebelum berkelip lakaran, anda perlu sedikit mengubahnya, iaitu mengubah arahan yang dihantar. Bergantung kepada apa yang anda perlu periksa, tulis arahan berikut ke baris hantar:
"1" - pergerakan ke hadapan (tulis arahan tanpa tanda petikan!)
"2" - pergerakan ke belakang
"15" - hentian penuh
"3" - putar roda stereng ke kiri
"4" - putar stereng di sebelah kanan
"5" - tetapkan roda stereng di tengah
"10" - hidupkan lampu
"11" - matikan lampu
Membuat kawalan jauh dengan pemancar radio 433 MHz adalah topik untuk artikel berasingan. Saya pasti akan menulis arahan untuk pembuatan kawalan jauh itu.
Saya ingin mengatakan bahawa pilihan ini sesuai untuk hampir mana-mana model kereta Lego. Ia cukup untuk menyambung semua mekanik dan mencari tempat untuk lembaga. Dan jika anda memasukkan fantasi, maka anda boleh membuat mekanisme apa-apa model.