


Saya mengambil bahagian dari reka bentuk saya dari arahan pemasangan untuk Lego Technic 42049 dan Lego Technic 42041. Selebihnya adalah penambahbaikan saya. Untuk kawalan, saya akan menggunakan modul Bluetooth yang dikaitkan dengan peranti android atau komputer. Jadi kita perlukan:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- Pemandu enjin L9110S
- 1 pemacu servo SG-90
- Modul Bluetooth HC-05 atau setaraf
- USB-UART untuk firmware arduino
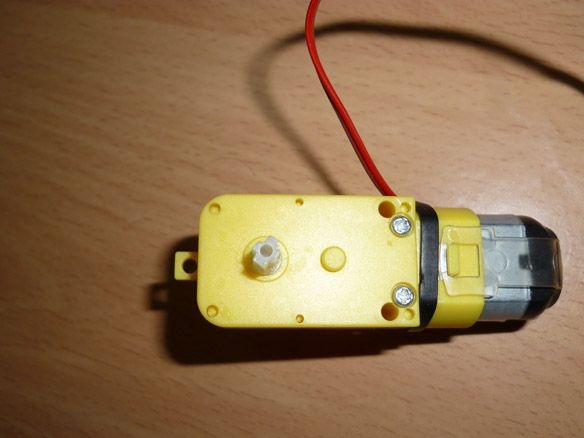
- Kotak gear motor 6v 1: 150 100 rpm
- 2 LED
- 2 resistor 150 ohms
- Kapasitor 10v 1000uF
- 2 satu baris sisir PLS-40
- Induktor 68mkGn
- 6 NI-Mn 1.2v 1000mA bateri
- Penyambung ayah-ibu dua pin ke wayar
- Homutik
- Wayar warna yang berbeza
- solder
- Rosin
- besi pematerian
- Bolt 3x20, kacang dan pencuci untuk mereka
- Bolt 3x40
- Bolt 3x60
Langkah 1 Perhimpunan Gandar Belakang
Melangkah ke hadapan - ke belakang akan dilakukan oleh motor gear dengan motor 6V, nisbah gear 1: 150 dan kelajuan terbiar 100 rpm. Anda boleh mencuba nisbah gear yang lain, tetapi, pada pandangan saya, ini adalah optimum. Sumbu kotak gear di kedua-dua belah pihak mesti diikutkan dalam bentuk salib dan memakai butiran lego:
Seterusnya, kami mengumpul asas gandar belakang mengikut arahan Lego 42029 bahagian 1, bermula dari 3 muka surat hingga 8 termasuk. Dan tambahkan beberapa butiran supaya anda boleh memasang enjin dan kotak gear.
Lihat fail dalam talian:
Lihat fail dalam talian:



Langkah 2 Memasang Gandar Hadapan
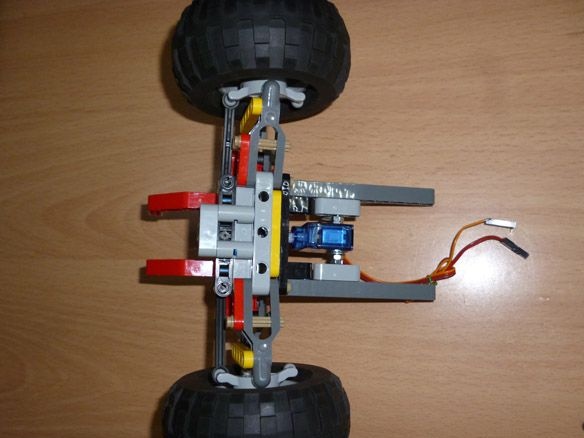
Kami memasang bahagian depan suspensi mengikut arahan Lego 42029 bahagian 1, dari muka surat 21 hingga 23. Kami mengambil trapezoid dari bahagian kedua Lego dari halaman 6 hingga 11. Servo SG-90 sangat sesuai untuk menukar roda. Untuk membetulkannya pada model kami, perlu berhati-hati supaya tidak menyentuh bahagian dalaman servo, melalui lubang dengan garis pusat 3.2 mm atau hanya dipotong dengan pisau alat tulis. Dan juga memotong bahagian-bahagian yang menonjol ("sayap" untuk mengikat). Kami memasukkan bolt ke lubang yang dibuat dan membetulkannya dengan kacang. Pada servo aci kita memakai tuas dengan bahagian yang kacau dari lego:





Langkah 3 Memasang asas dan teksi
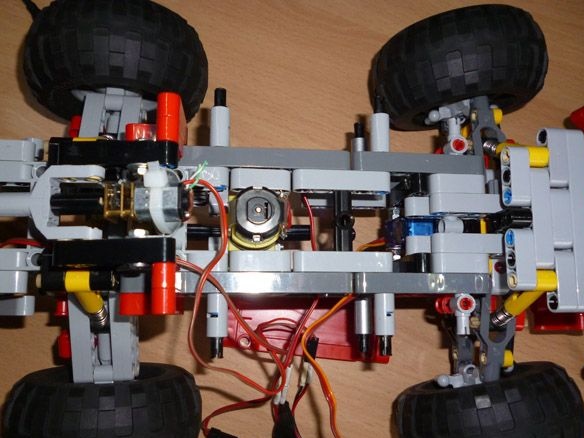
Kami menghubungkan kedua-dua jambatan seperti yang ditunjukkan dalam foto:
Kami memasang kabin mengikut arahan Lego 42041. Bermula dari halaman 39 hingga 47 bahagian pertama. Selanjutnya dari halaman 5 hingga 28 bahagian kedua. Dan juga bumper di muka surat 38 hingga 43 bahagian kedua arahan.
Lihat fail dalam talian:
Lihat fail dalam talian:


Lihat fail dalam talian:
Lihat fail dalam talian:
Langkah 4 Elektrik
Untuk kawalan, kami akan menggunakan Arduino Pro Mini dan modul Bluetooth. Pro Mini boleh digantikan dengan mana-mana papan Arduino yang lain. Saya memilih Pro Mini, jadi ia adalah yang terkecil. Pemandu motor diperlukan untuk menyambungkan motor.
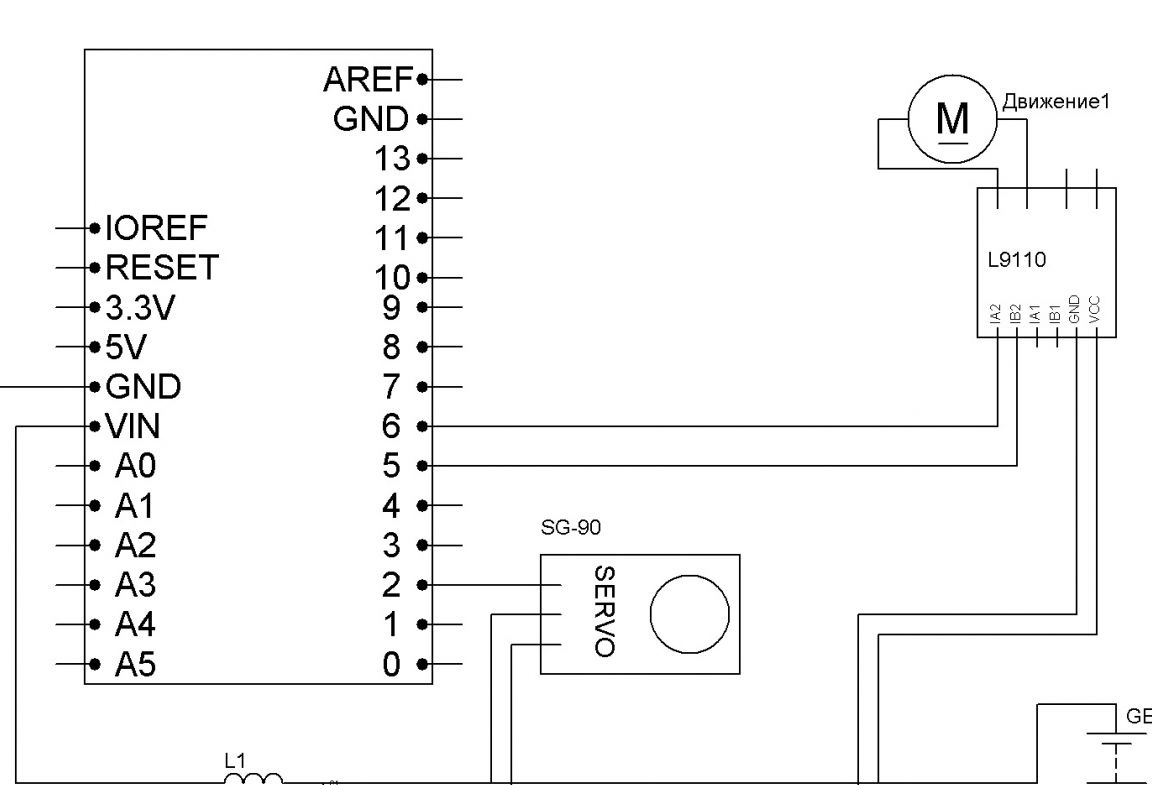
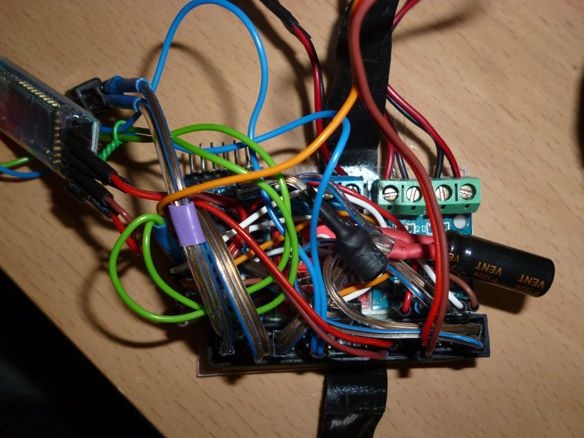
Sambungan semua komponen dengan wayar Ibu-ke-Dupont. Kuasa - 6 NI-Mn 1.2v bateri 1000mA disambungkan dalam siri. Kapasitor mana-mana kuasa rendah, induktor juga anda akan dapati, anda perlu menstabilkan kuasa mikrokontroler. Anoda kedua-dua LED disambungkan kepada 4 pin arduino, katod kepada GND. Resistor dipilih untuk LED yang digunakan. Untuk kemudahan, gulung bateri dengan pita.

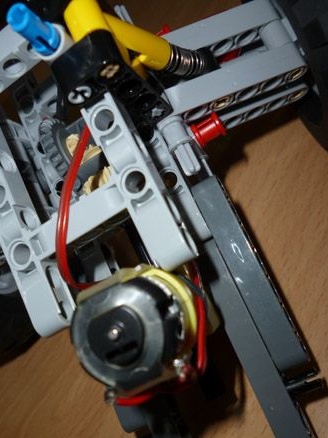
Kami melekatkannya pada pita dua sisi berdasarkan:
Kami meletakkan juruelektrik kami di antara roda dan tutup:
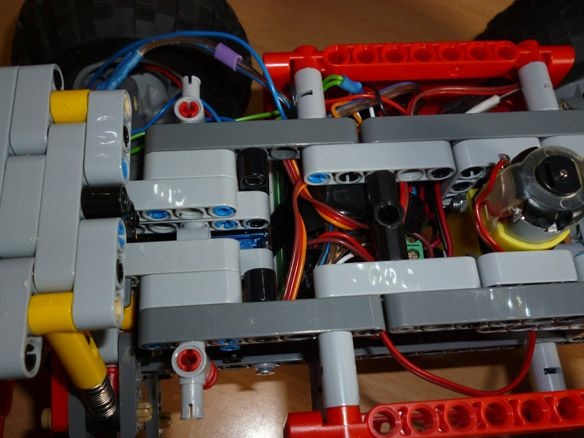
Tambah beberapa pukulan:


Langkah 5 Persediaan Bluetooth
Modul Bluetooth yang paling berpatutan hari ini ialah HC-05 dan HC-06. Mereka banyak terdapat di kedai dalam talian Cina. Perbezaan di antara mereka adalah yang pertama boleh bekerja dalam mod master (hamba) dan dalam mod hamba (tuan). Yang kedua adalah peranti hamba yang murni. Dengan kata lain, HC-06 tidak dapat mengesan peranti berpasangan dan mewujudkan sambungan dengannya, ia hanya boleh mematuhi tuan.
Ciri-ciri ringkas modul:
- Cip Bluetooth - BC417143 dihasilkan oleh
- protokol komunikasi - Spesifikasi Bluetooth v2.0 + EDR;
- jejari tindakan - sehingga 10 meter (tahap kuasa 2);
- Sesuai dengan semua penyesuai Bluetooth yang menyokong SPP;
- Jumlah ingatan kilat (untuk menyimpan firmware dan tetapan) - 8 Mbit;
- kekerapan isyarat radio - 2.40 .. 2.48 GHz;
- antara muka tuan rumah - USB 1.1 / 2.0 atau UART;
- penggunaan kuasa - semasa semasa komunikasi adalah 30-40 mA. Nilai semasa purata adalah kira-kira 25 mA. Selepas komunikasi ditubuhkan, penggunaan semasa ialah 8 mA. Tiada mod tidur.
Biasanya, modul dijual sebagai dua papan disold bersama. Yang lebih kecil ialah modul kilang, digunakan secara meluas dalam pelbagai jenis elektronik peranti. Besar - roti papan khas untuk DIY.
Inilah modul HC-05 dan HC-06 DIY seperti:
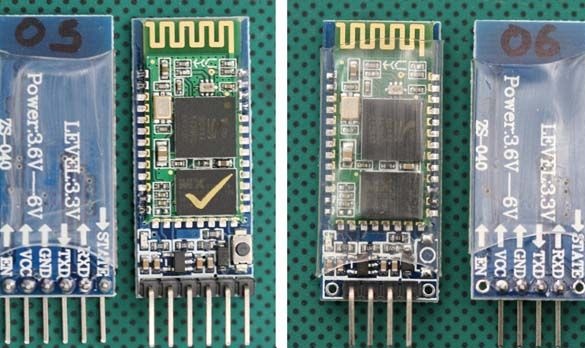
Pada dasarnya, anda boleh menggunakan modul apa sahaja yang anda suka. Modul tanpa papan roti kurang, tetapi kemudian anda perlu mengurus bekalan kuasa 3.3 V untuk modul dan menyiksa diri anda dengan wayar penyolder ke modul. Saya memilih yang optimum, pada pendapat saya, dalam nisbah harga / fungsi HC-06.
Kami menyambung seperti berikut:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND -GND
Untuk operasi yang betul, modul mesti dikonfigurasikan. Kami akan mengkonfigurasi perintah AT yang dimasukkan ke dalam tetingkap terminal. Saya memberi contoh untuk menubuhkan modul HC-05. Jika anda mempunyai tetapan yang berbeza mungkin berbeza. Agar modul kami menerima arahan, mula-mula kami melancarkan Arduino dengan firmware berikut:
Dalam kes ini, Arduino bertindak sebagai jambatan antara komputer dan modul. Dalam firmware, saya menggunakan perpustakaan SoftwareSerial. Pada kelajuan tinggi, ia berfungsi dengan tidak stabil. Sekiranya anda mahu kelajuan tinggi, anda boleh menyambungkan modul terus ke kenalan Arduino RX dan TX dan menulis semula firmware. Tetapi dalam kes saya, kita akan bekerjasama dengan modul pada kelajuan 9600. Jadi selepas firmware, buka terminal dan masukkan:
"AT" (tanpa petikan) jawapan "OK" harus datang (ini bermakna semuanya disambung dengan betul dan modul berfungsi)
"AT + BAUD96000" (tanpa petikan) jawapan "OK9600" sepatutnya datang.
Jika anda mempunyai jawapan yang betul, pergi ke langkah seterusnya.
Langkah 7 firmware
Untuk menulis firmware dan firmware itu sendiri, saya menggunakan Arduino IDE. Versi semasa untuk hari ini ialah 1.8. Sebenarnya firmware:
Langkah 8 Sediakan telefon anda.
Pada telefon Android, anda perlu memasang program untuk mengawal robot melalui Bluetooth. Terdapat banyak daripada mereka. Anda boleh memasukkan "Bluetooth Arduino" dalam mainan Google dan pilih selera anda. Saya suka BT Controller. Muat turun dan pasang pada telefon atau tablet Android anda. Seterusnya, melalui tetapan Android, anda perlu mewujudkan sambungan dengan modul kami. Kata laluan untuk sambungan ialah "1234" atau "0000". Seterusnya, atur program untuk arahan yang sesuai. Senarai adalah di bawah.
Langkah 9 Persediaan Komputer (jika perlu)
Jika perlu, atau hanya kemudahan untuk mengawal, anda boleh menggunakan komputer atau komputer riba. Untuk melakukan ini, komputer mesti mempunyai Bluetooth. Kami menubuhkan komunikasi dengan modul kami melalui kawalan di komputer. Seterusnya, kami memerlukan terminal untuk menghantar arahan. Mana-mana yang mudah untuk anda.Setelah merekodkan firmware, kawalan dilakukan dengan butang berikut (perintah):
W - ke hadapan
S - belakang
A - kiri
D - betul
F - berhenti
G - roda stereng
K - lampu
L - lampu mati
Sentiasa memasukkan arahan adalah menyusahkan, jadi saya cadangkan menggunakan program untuk menghantar arahan. Saya menggunakan Z-Controller. Dalam program ini, pilih port (port com yang mana sambungan dibuat) dan konfigurasikan kekunci untuk arahan. Sediakan terbiar dan intuitif.
