

Vibrobots adalah seperti itu robotyang bergerak disebabkan oleh getaran. Walaupun reka bentuk mereka agak mudah, mereka tidak terlalu mengagumkan di tempat kerja daripada saudara-saudara mereka yang lebih teknikal dari segi teknikal. Robot sedemikian akan menggunakan bulu sebagai penggerak, ini adalah sejenis kakinya.
Robot yang diterangkan dalam artikel itu boleh secara bebas mengubah trajektori pergerakan dan dengan sendirinya mengelilingi halangan. Sebagai eksperimen, penulis mencipta dua robot di mana sumber tenaga dan enjin yang berbeza dipasang. Pada dasarnya, tidak ada standard yang ketat mengenai bahan yang digunakan, perkara utama adalah mematuhi skema yang diberikan ketika memasang robot.

Bahan dan alat untuk pembuatan:
- Hubungan nilon dalam saiz 3x150mm;
- penebat pita warna hitam;
- 9 bateri voltan (6F22);
- cakera laser (CD atau DVD tiada perbezaan);
- sarung pelindung;
- penyambung bateri 9 volt;
- eksentrik (padam).

Proses pembuatan robot:
Langkah pertama. Buat dasar robot
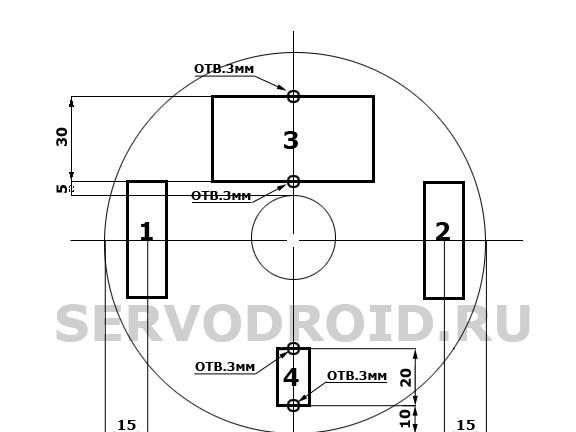
Sebagai asas robot, cakera CD atau DVD biasa akan digunakan. Buat lubang di dalamnya dengan jelas mengikut skema, yang dibentangkan dalam foto. Tanpa pengecualian, semua lubang dibor dengan gerudi 3 mm. Diameter ini cukup cukup apabila digunakan untuk melampirkan ikatan nilon. Sekiranya anda memutuskan untuk menggunakan kaedah pengikat yang berbeza, maka lubang-lubang itu boleh digerudi ke saiz lain. Lukisan yang dicadangkan sesuai untuk sebarang pemasangan robot.
Bilangan 1 dan 2 menunjukkan lokasi pemasangan berus, bateri dipasang di alun-alun dengan nombor 3, dan motor dipasang di dataran 4.
Langkah Dua Kami membuat dan memasang penggerak
Terima kasih kepada pendorong, robot akan bergerak. Untuk menjadikannya anda perlu mengambil dua berus gigi. Ia adalah yang terbaik bahawa berus adalah sama dalam ketinggian dan bentuk rambut. Sekiranya bentuknya berbeza, ia boleh diperbetulkan dengan gunting.
Kini bulu perlu menetapkan arah. Untuk ini, pita pelekat diambil dan bulu dibungkus dengan cara yang sama seperti yang ditunjukkan dalam gambar. Dalam kedudukan ini, berus perlu diadakan selama kira-kira sejam, supaya bulu-bulu mengingati kedudukan ini. Dalam foto, anak panah kelabu menandakan arah di mana bulu di condong.

Selepas bentuk yang diingini ditetapkan, anda perlu memotong bahagian dengan bulu dari sikat gigi. Kemudian anda perlu mengambil senjata gam dan memasang bulu pada cakera di tempat yang ditentukan. Semua kerja mesti dijalankan dengan cepat dan tepat, kerana gam panas menyejukkan dengan cepat dan mengeras.Anda perlu cuba memasang berus supaya mereka berdiri sejajar antara satu sama lain.
Bulu berus harus menunjuk ke belakang, dengan kata lain, ke arah bateri pada 9 volt. Semasa operasi, robot akan bergerak ke arah arah bulu, iaitu, lokasi bateri akan menjadi belakang robot.

1 - cakera, 2 - pelekat panas-mencair, 3 - lubang untuk memasang enjin, 4 - lubang untuk memasang bateri. Anak panah putih menunjukkan arah bulu.
Langkah Tiga Membuat eksentrik
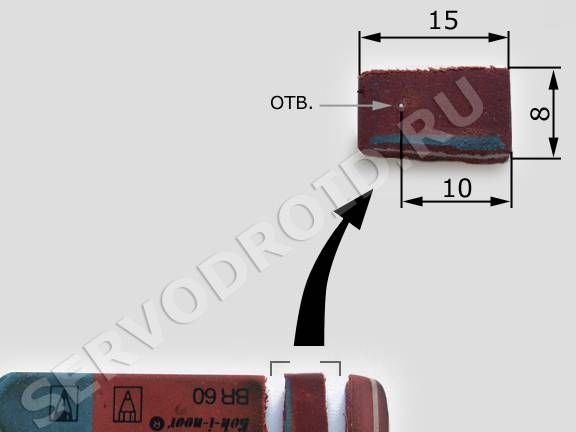
Untuk mendapatkan getaran, objek eksentrik, iaitu objek tidak seimbang, mesti dipasang pada batang motor. Penulis membuat eksentrik penghapus dengan memotong saiz yang sesuai. Buat lubang di tempat yang ditunjukkan oleh anak panah putih. Ia tidak boleh menjadi besar, kerana sipi akan melepaskan batang motor. Ia boleh dibuat dengan jarum.
Langkah Empat Pengeluaran perlindungan pelindung.
Oleh kerana getaran dibuat oleh pemutar berputar untuk robot berfungsi, disarankan untuk melindungi tempat ini daripada pelbagai objek. Di samping itu, perlindungan seperti itu akan memberikan robot yang lebih menarik. Penutup pelindung dibuat dari kertas, yang terdiri dari beberapa lapisan. Anda perlu membuat silinder dari kertas; saiznya bergantung pada saiz enjin. Untuk memberi lebih ketegaran kepada kertas, ia boleh dioles dengan gam dan oleh itu, gunakan beberapa lagi lapisan. Atau anda boleh menggunakan kadbod untuk tujuan ini.
Untuk membuat bentuk silinder, motor hanya dibalut dengan kertas di atas.




Langkah Lima Perhimpunan akhir robot itu
Enjin dipasang di tempat tertentu dan kemudian diperbetulkan dengan senarai nilon. Skor seperti itu boleh dibeli di kedai-kedai yang mengkhususkan diri dalam penjualan bahan binaan.
Bateri juga dipasang dengan tepat. Adalah penting untuk mempertimbangkan bahawa bateri mesti dipusatkan dengan jelas, jika tidak, trajektori robot mungkin berubah. By the way, dengan cara ini pada masa akan datang adalah mungkin untuk menetapkan trajektori pergerakan buatan sendiri.


Sekarang antara penyambung klip dan motor anda perlu memasang suis kecil. Kesimpulannya, ia tetap menyambungkan penyambung klip ke bateri dan anda boleh mula menguji robot. Wayar dihubungkan dengan warna.
Walau bagaimanapun, apabila menggunakan bateri Kron, tidak perlu memasang suis, anda boleh menghidupkan robot dengan menyambungkan penyambung.
Nah, untuk versi kedua robot, anda hanya boleh mengeluarkan bateri dari peranti, tetapi sudah tentu suis lebih menjanjikan.
Itu sahaja, robot sudah bersedia, anda boleh mula menguji. Untuk mencapai hasil yang diinginkan, anda boleh cuba mengubah polaritas, jadi motor akan berputar ke arah yang bertentangan, dan robot akan berperilaku secara berbeza.