Malam Jumaat yang akan datang, penulis ingin mengumpulkan sesuatu yang menarik. Ingat bahawa, dia melihat projek-projek robot lukisan, dan mempunyai servo putaran berterusan, ia telah memutuskan untuk memasang robot itu. Servo rotasi berterusan boleh dibuat dari biasa.
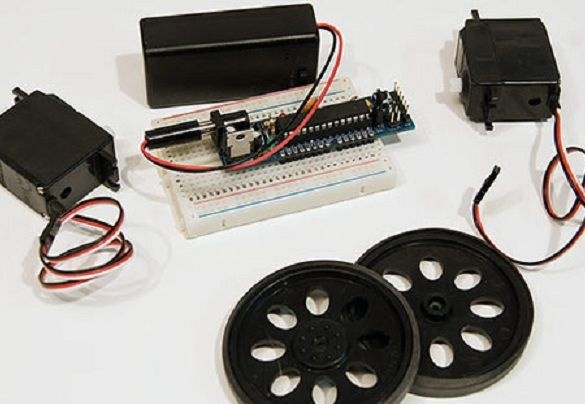
Bahan:
- DC Boarduino (ini adalah klon Arduino)
- Servo pusingan berterusan 2 keping
- Servo roda 2 pcs
- papan roti
- Penyambung bateri 9V dengan palam dan suis 2.1 mm
- menyambung wayar
Ia tidak perlu menggunakan Boarduino dalam projek ini, mana-mana papan Arduino sudah cukup. Penulis memilih lembaga ini kerana saiznya. Anda juga akan memerlukan sebilangan penanda, anda boleh membeli satu set warna yang berbeza untuk robot ini.
Di samping itu, anda memerlukan bateri 9V dan asas untuk badan robot lukisan.
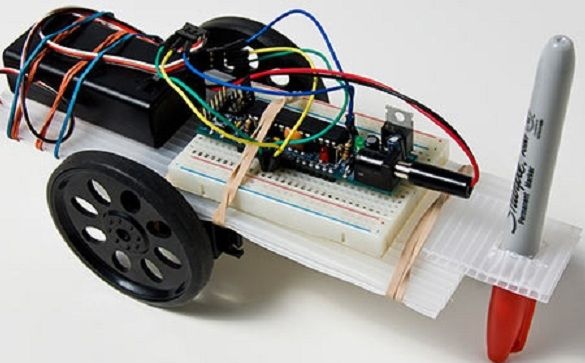
Tidak ada yang rumit dalam pemasangan robot itu. Pertama sekali, penulis mengikatkan roda dengan dua servos dengan pita pelekat, dan mengukur jarak antara roda. Ia adalah perlu bahawa lebar asas adalah sedikit kurang daripada jarak antara roda. Penulis menggunakan plastik beralur, kerana ia agak ringan dan tahan lama, dan tidak sukar untuk bekerja dengannya. Penggunaannya, tentu saja, tidak penting, anda juga boleh menggunakan kadbod atau plastik daripada kes-kes untuk cakera.
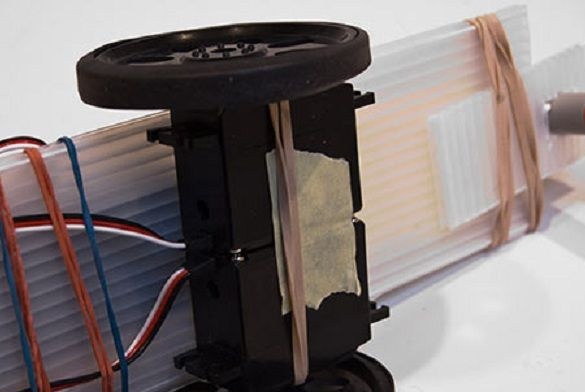
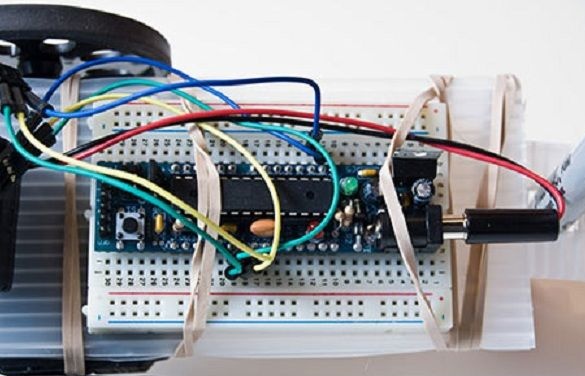
Pemacu servo disambungkan ke pangkal dengan jalur getah. Apabila meletakkan bateri dan papan roti, kesukaran timbul, kerana perlu mengekalkan keseimbangan. Penulis ingin membuat lebih banyak ruang di sisi dengan penanda itu diletakkan, tetapi tidak mahu membuat kelebihan di sebaliknya. Dengan bantuan band getah, agak mudah untuk menyesuaikan lokasi komponen, menentukan yang optimum.
Sepanjang projek ini, wayar dengan pin BLS digunakan untuk menyambung ke papan roti, pemacu servo juga dihubungkan dengannya.
Apabila penulis selesai semua kerja memasang robot itu, dia segera mahu memeriksa prestasinya. Ia mengambil sedikit masa untuk mencari kod. Setelah tersandung pada artikel mengenai mengawal servis rotasi berterusan Parallax menggunakan Arduino, dia menyedari bahawa dia berada di landasan yang betul. Kod itu dipermudahkan sebanyak mungkin, pada masa ini Drawbot hanya boleh masuk dalam kalangan.Sudah tentu, ini primitif, tetapi ia juga merupakan permulaan yang hebat dan asas untuk pembangunan dan pemodenan. Kod ini boleh dimuat turun di bawah artikel.
Sekarang penulis telah menerima robot yang bergerak dalam bulatan. Melanjutkan kerja, penulis mengambil sisa plastik bergelombang dan membuat lubang di dalamnya dengan bantuan pisau. Lubang dipotong dengan diameter sedikit lebih kecil daripada yang diperlukan, terima kasih kepada lubang yang dikurangkan penanda di dalamnya dipasang dengan sempurna. Jika anda menggunakan kadbod, maka kesan ini tidak akan berlaku, dan penanda tidak akan tahan dengan baik atau jatuh.

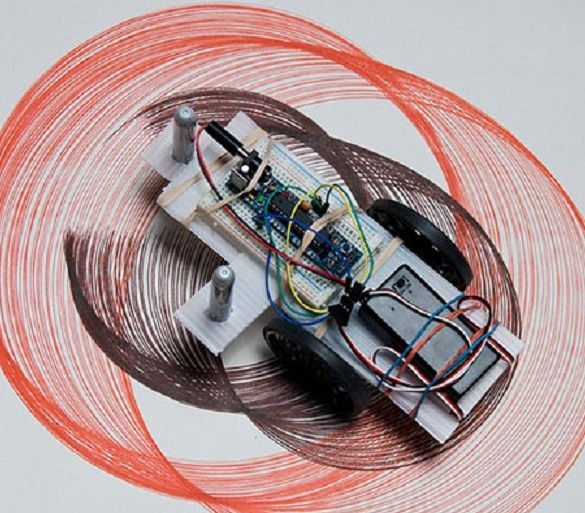
Selepas memasang penanda, sudah tiba masanya untuk menguji robot. Dengan menetapkannya ke pusat lembaran 24x18 dan menghidupkannya, penulis akhirnya melihat Drawbot beraksi. Dia mula memutarkan bulatan lukisan. Kita boleh mengatakan bahawa penulis berjaya membuat robot yang mencipta sejenis karya seni.
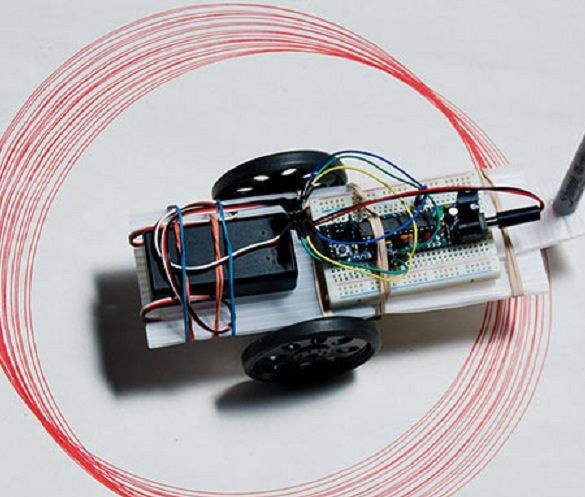
Gambar itu agak canggung kerana lembaran yang terletak di lantai, dan ia tidak cukup, dan kemungkinan besar, servos tidak berputar serentak. Ternyata satu bulatan boleh menjadi lebih rendah, yang kedua lebih tinggi, dan yang seterusnya masih sedikit lebih tinggi atau lebih rendah. Mungkin, di lokasi yang ideal, semua kalangan akan diselaraskan dalam satu baris. Ia kelihatan lebih cantik dalam penampilan.
Penulis berpendapat bahawa penanda kedua dapat mencerahkan keadaan, dan robot itu akan membuat gambar lebih menarik. Hasilnya adalah baik, lingkaran mula bersilang antara satu sama lain. Ia akan menjadi lebih menarik untuk melihat bagaimana Drawbot berkelakuan pada kertas besar.
Dengan melepaskan robot ke permukaan kertas, penulis boleh mendapatkan bulatan atau sekumpulan bulatan. Tetapi dengan robot yang sudah siap, anda sudah boleh memikirkan memperbaikinya dengan mengubah kod.