Semasa pendidikannya, penulis bermain permainan dengan sokongan pecutan pada telefonnya. Dia benar-benar suka memandu kereta di telefon hanya dengan mencondongkan, dan kemudian dia mula bermimpi membuat kereta dengan kawalan yang sama dalam kehidupan sebenar. Sekarang ada Arduino dan setelah memperoleh kemahiran pengaturcaraan, sudah tiba masanya untuk membuat mesin yang diurus di Android, dia menyebutnya Hercules.
Dia mendapat nama ini kerana tork besar dan kelajuan tinggi. Model boleh dikawal menggunakan telefon Android melalui Bluetooth. Mana-mana telefon dengan sistem operasi ini sesuai untuk dikawal, penulis tidak mengehadkan satu alat kawalan jauh. Juga, menggunakan telefon menyimpan wang, kerana saya tidak perlu membelanjakan wang untuk mencipta kawalan jauh.
Bahan dan alat:
- Arduino Uno
- Pemancar Bluetooth
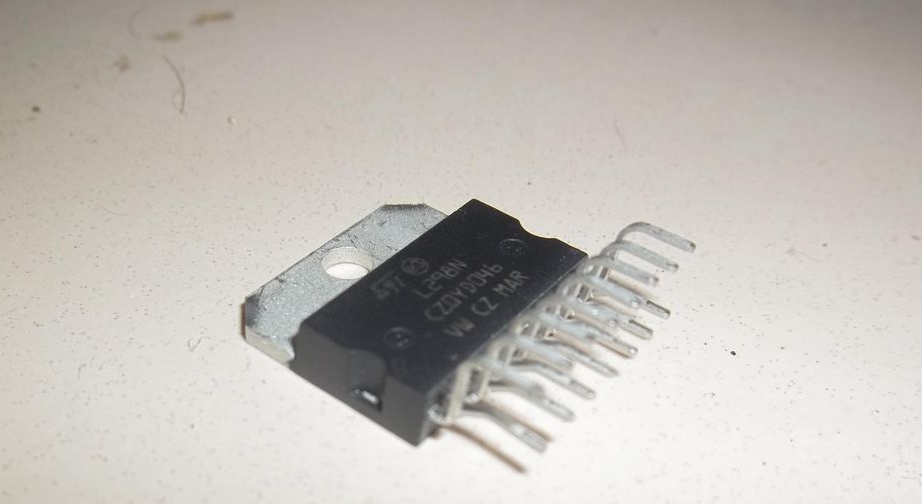
- Pemandu enjin dua (dengan jambatan L298 H)
- Motor dengan gear 4 buah (kuasa dipilih bergantung pada penggunaan mesin)
- Roda 4 pcs
- Bateri 1Ah SLA 12V
- Asas untuk komponen (casis)
- papan roti
- Kotak untuk 4 unit perumahan
- Tukar SPST
- Menyambung wayar untuk Arduino
- Wayar solder
- Kacang dan skru saiz kecil
- Resistor 10 kOhm 1 pc
- Resistor 20 kOhm 1 pc
- Telefon Android
- besi pematerian
- solder
- temp solder
- gerudi





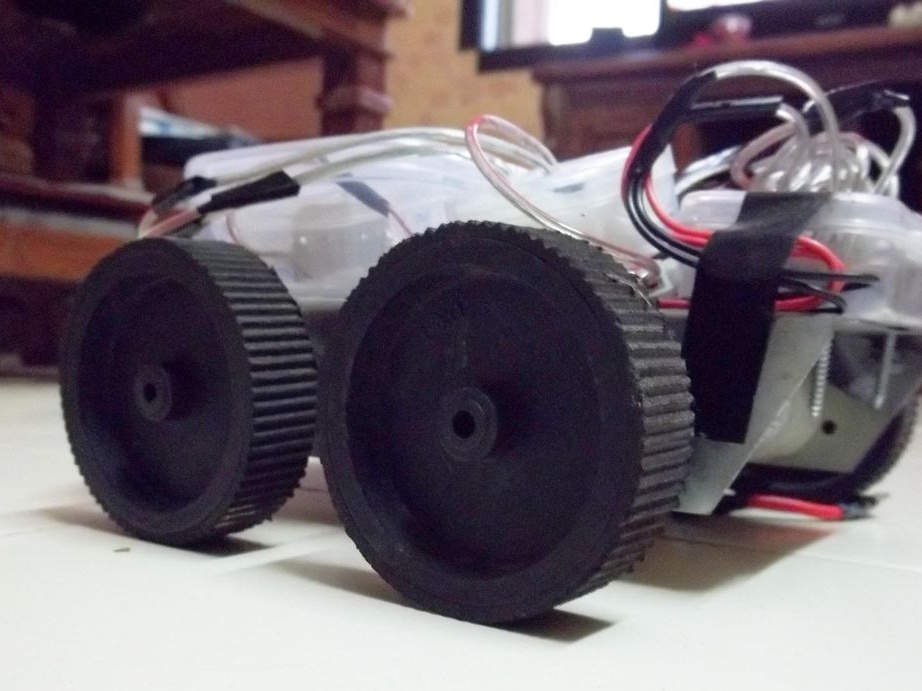
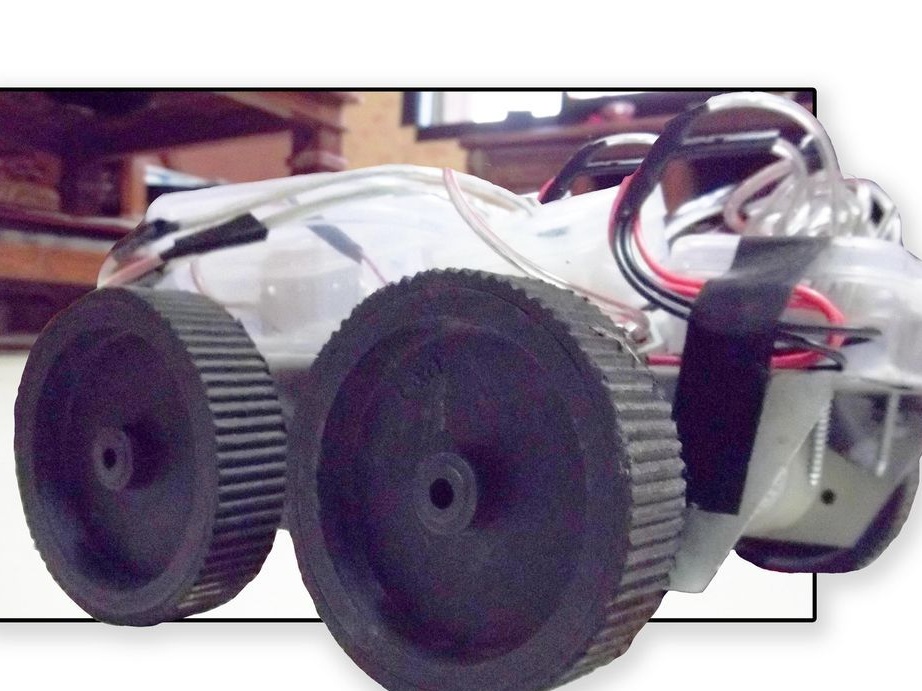
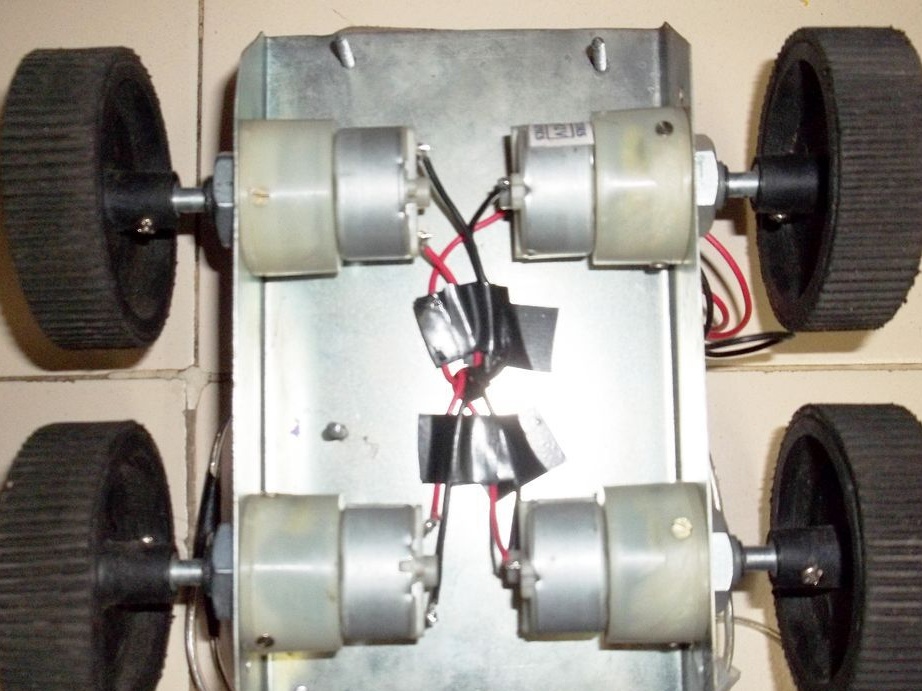
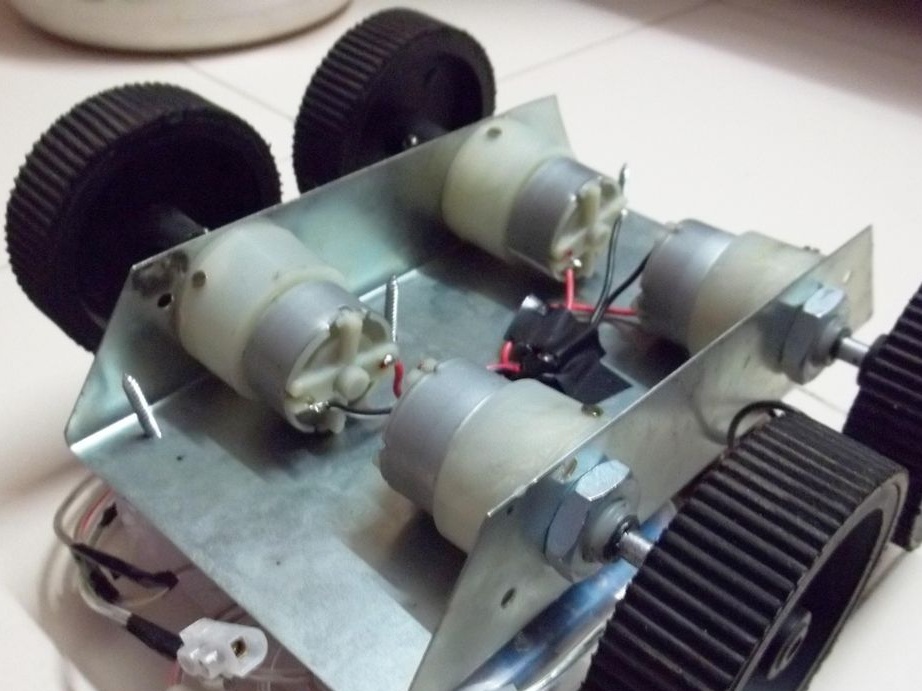
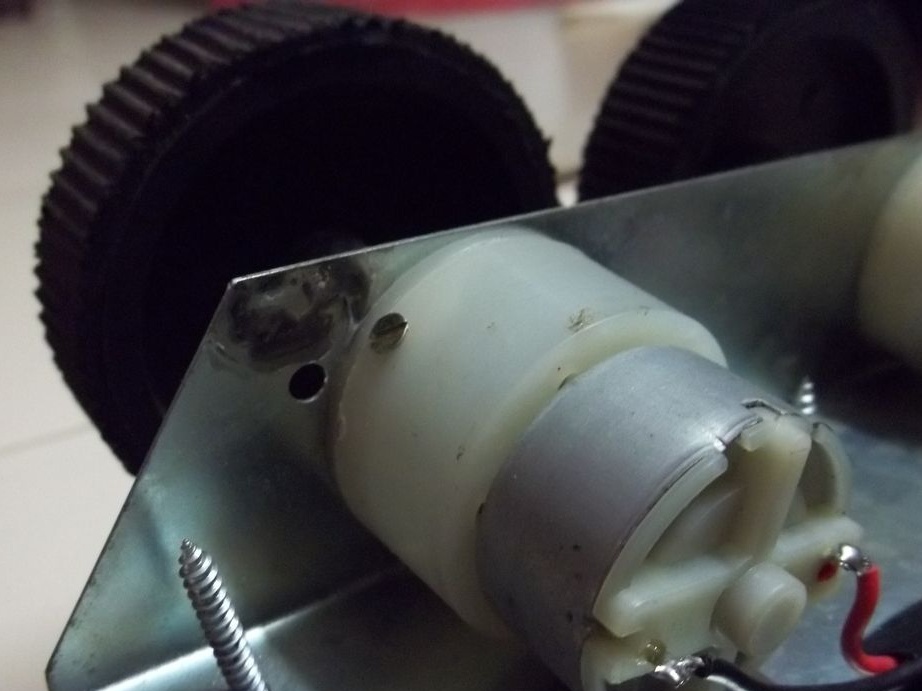
Langkah pertama. Roda dan casis.
Skru enjin menjadikannya mudah untuk dipasang pada casis menggunakan kacang. Roda dipasang sepanjang jalan ke batang enjin. Dua motor yang betul dihidupkan sejajar dengan satu sama lain, serta dua yang kiri. Apa jenis casis selepas memasang empat roda dan enjin boleh dilihat dalam gambar di bawah.
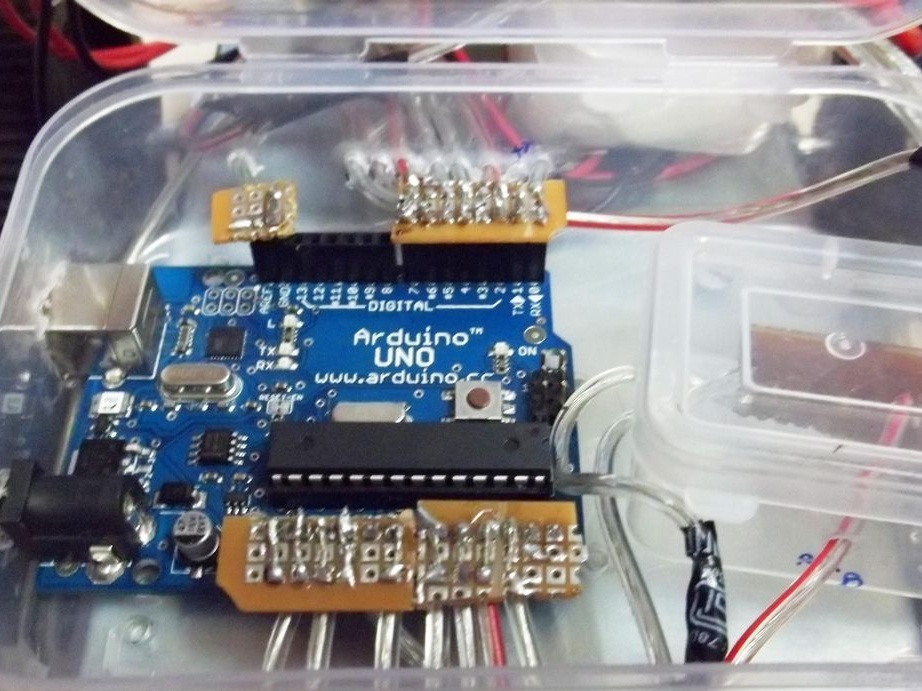
Langkah Dua Perumahan untuk Arduino.
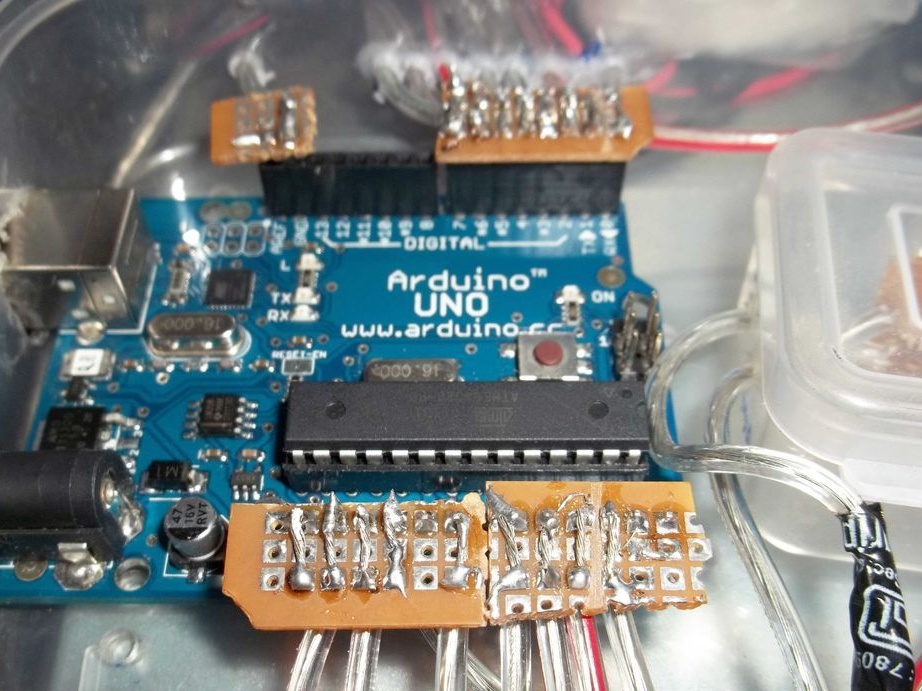
Rajah kes Arduino dibahagikan kepada beberapa bahagian. Penyelesaian reka bentuk modular sedemikian akan membantu pada masa depan untuk menyokong litar, atau menghapuskan kerosakan yang mungkin. Jika salah satu komponen rosak atau terbakar, ia boleh diganti dengan cepat, dan tanpa melanggar reka bentuk. Kotak untuk Arduino telah dicipta seperti berikut:
- Empat bahagian dipotong dari papan roti, dua daripadanya dengan saiz lubang 8x3, kedua dua bahagian 6x3.
- PIN BLS disolder ke setiap papan di sebelah panjang.
- Setiap pin di papan roti juga disalurkan dengan wayar kira-kira 10 cm panjang. Ini dilakukan supaya wayar tidak akan keluar dari Arduino, kerana sekarang beban mula diedarkan secara sama rata.
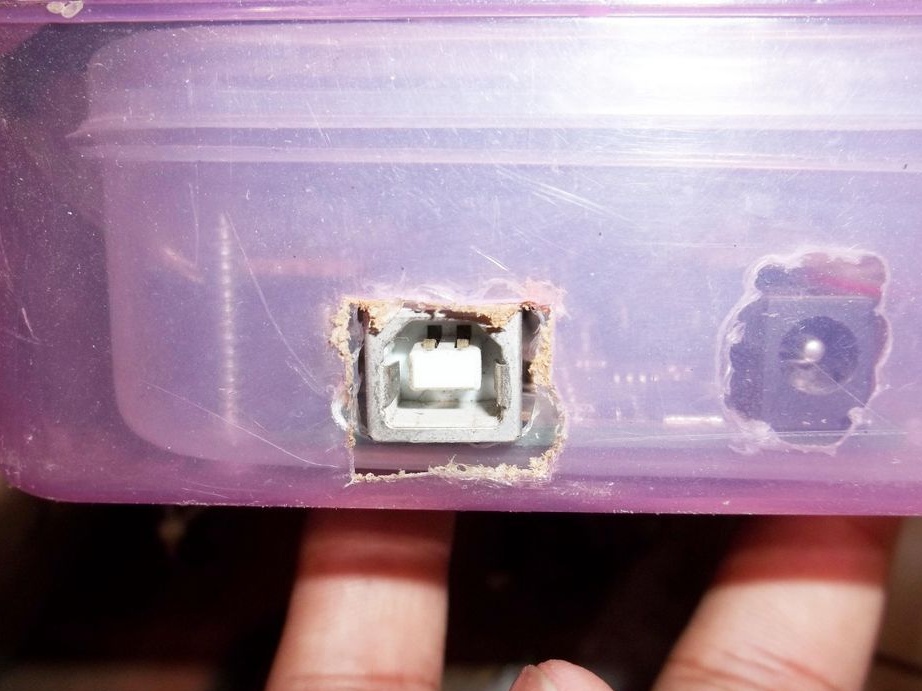
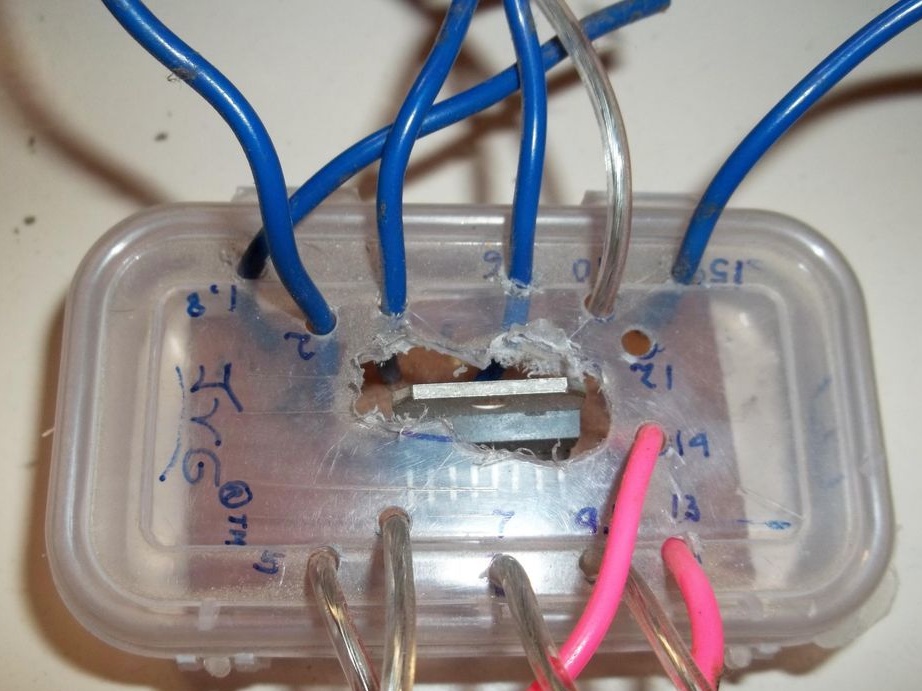
- Seterusnya, papan Arduino diletakkan dalam kes itu supaya output USB menyentuh dinding. Lubang telah dipotong untuk output ini, ini akan membantu memuat program tambahan ke dalam mesin, atau membuat pembetulan kepada yang sedia ada. Di sisi kotak, lubang dipotong untuk wayar yang akan keluar dari papan. Lubang tambahan dipotong di bahagian bawah kotak, di bawah penyambung pemasangan Arduino.


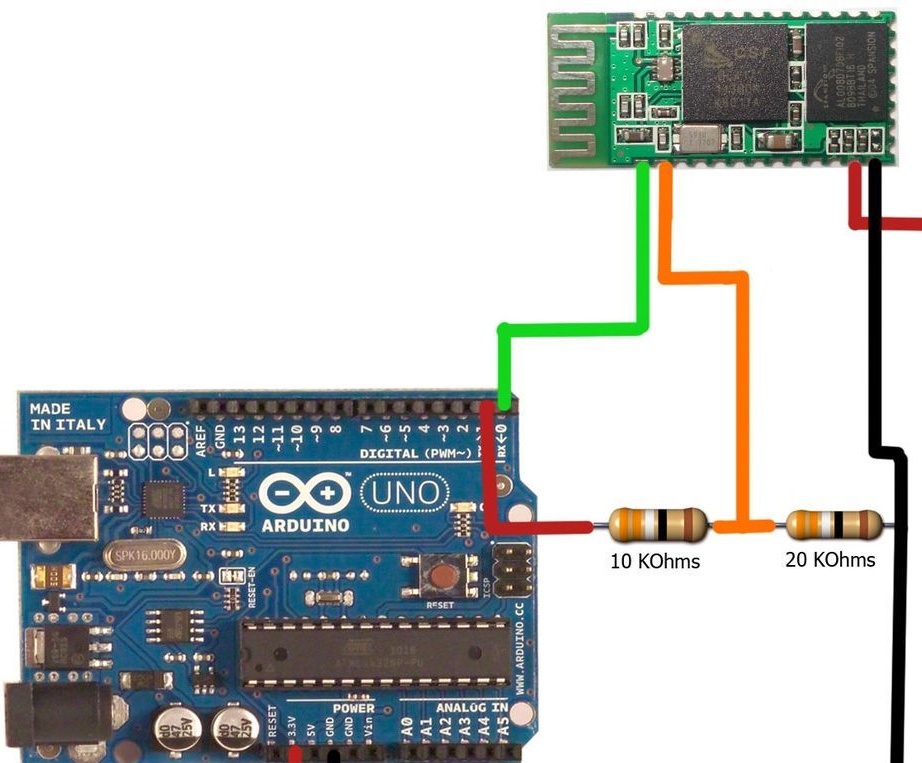
Langkah Tiga Transceiver Bluetooth.
Wayar pematerian ke penerima transceiver Bluetooth adalah tugas yang paling sukar dalam memasang projek ini, penulis tidak mempunyai tangan ketiga apabila menyolder. Empat konduktor panjang 10 cm digunakan, mereka disalurkan ke pin 1 (Tx), 2 (Rx), 12 (+ 3.3B) dan 13 (GND). Sekarang transceiver boleh diletakkan di dalam perumahan dengan lubang pra-siap untuk wayar. Penulis melekatkan wayar ke kotak untuk mengelakkan wayar mengoyakkan kenalan.



Langkah keempat. Perumahan untuk perintang.
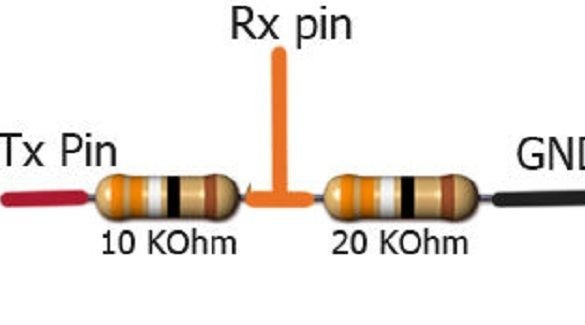
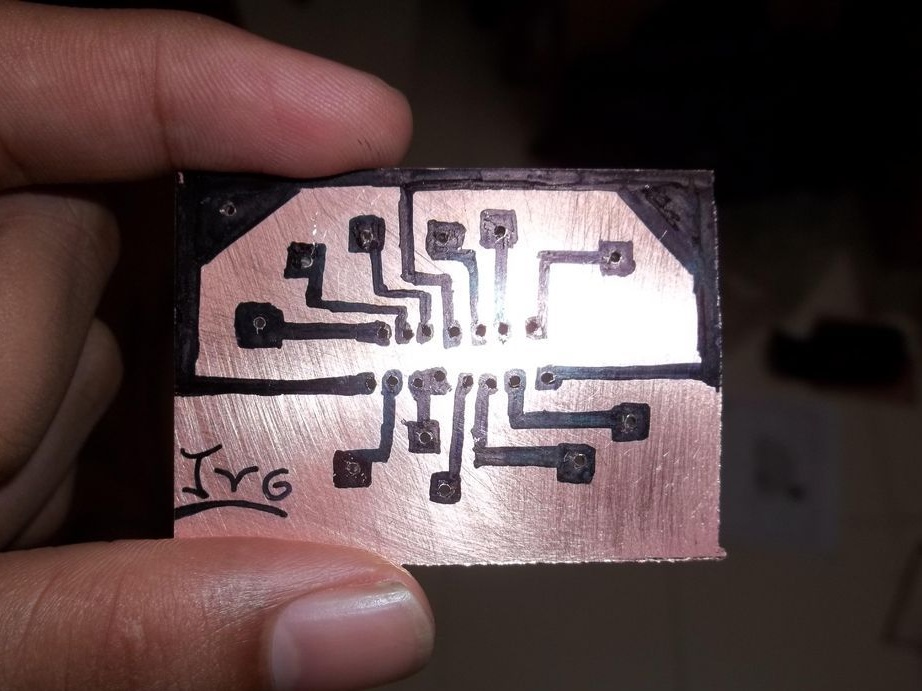
Oleh kerana output Arduino Tx menghantar isyarat dengan voltan 5V, dan modul Bluetooth berfungsi dengan voltan 3.3V, ia perlu untuk menukar 5V kepada 3.3V. Untuk tugas ini, penulis menggunakan pembahagi voltan. Menurut litar yang disediakan di bawah ini, dia mematerkan sebuah perintang ke bahagian selebihnya papan roti itu. Sudah tentu, adalah mungkin untuk meletakkan litar ini dalam kes Arduino, tetapi tidak ada ruang yang cukup, jadi penulis membuat yang berasingan untuk perintang.


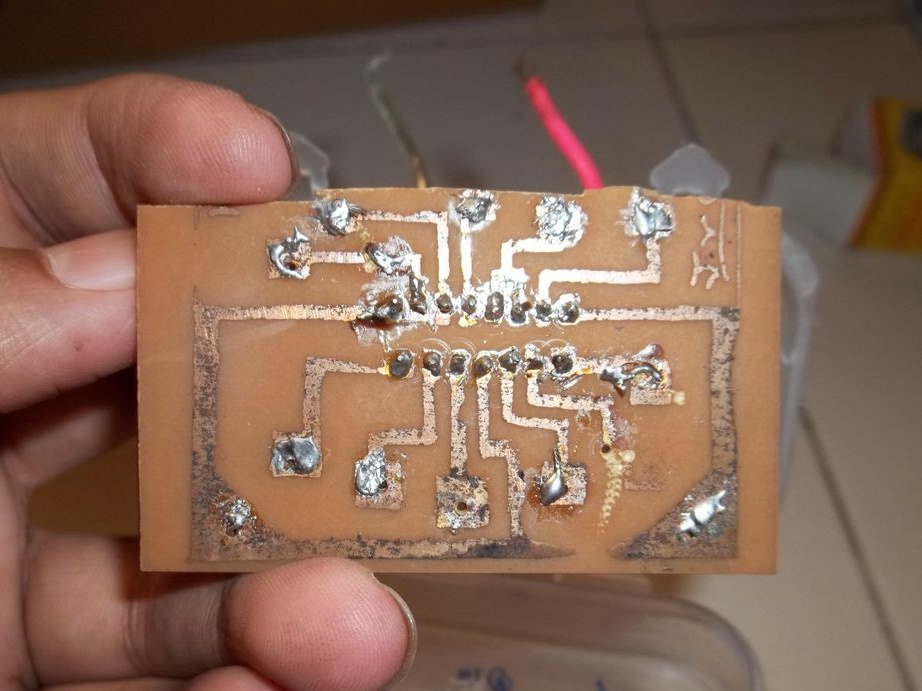
Langkah Lima Pemandu enjin.
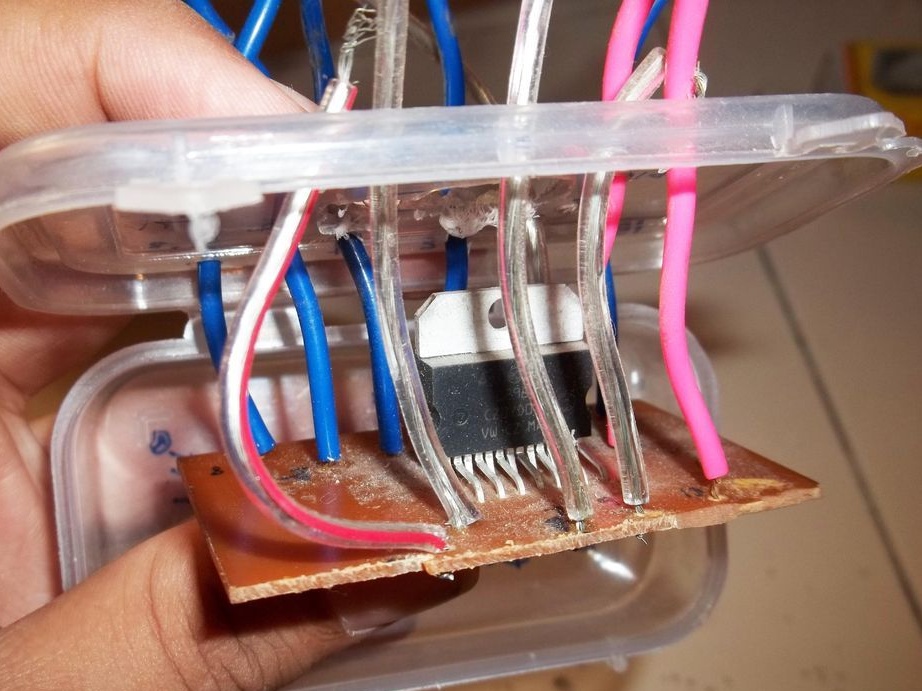
Penulis menggunakan pemandu dua dengan jambatan H-jambatan L298, dia mengawal empat enjin. Bagi beliau, penulis mencipta papan untuk memudahkan wayar penyolder kepadanya, lembaga itu sendiri dalam foto di bawah. Selepas pematerian, pemandu juga diletakkan dalam kes berasingan dengan lubang untuk wayar.
Langkah Enam Perhimpunan akhir.
Setiap komponen individu disambungkan kepada Arduino mengikut skema.
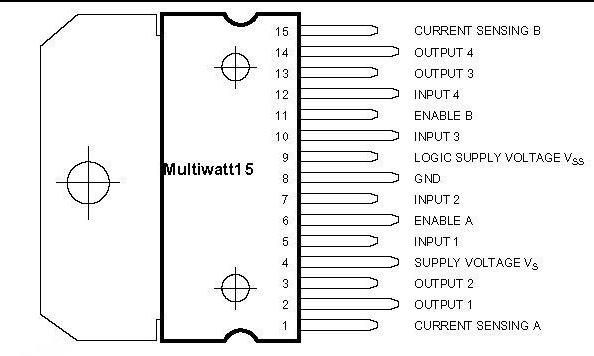
Menyambung pemandu enjin dengan Arduino berlaku mengikut pinout ini:
1 kepada GND
2 untuk sentuhan pertama motor kiri
3 untuk sentuhan kedua motor kiri
4 hingga bateri 12V
5 pin Arduino 2
6 hingga pin Arduino 3
7 hingga pin Arduino 4
8 kepada GND
9 hingga 5V dengan Arduino
10 pin Arduino 5
11 untuk pin Arduino 6
12 hingga pin Arduino 7
13 untuk sentuhan pertama motor yang betul
14 untuk sentuhan kedua motor yang betul
15 kepada GND
Kuasa 12V disambungkan ke pin Vin Arduino dan pin 4 daripada L298. GND Arduino masing-masing untuk bekalan kuasa GND.
Langkah ketujuh. Program untuk Arduino.
Untuk program ini berfungsi dengan betul, perlu memasang pustaka Amarino, yang boleh dimuat turun. Anda boleh memuat turun kod sumber untuk Arduino di bawah artikel.
Langkah Lapan. Perisian untuk Android
Perpustakaan Amarino adalah toolkit untuk bekerja dengan telefon pintar Android. Dengan memasang aplikasi tambahan pada telefon anda, anda boleh mula menulis program.
Aplikasi dan plugin Amarino boleh dimuat turun dari. Selepas memasangnya di telefon, ia tetap hanya untuk menghidupkan mesin dan menyambung kepadanya, dan pilih bahagian Tambah Peristiwa-> Sensor Percepatanometer.
Video dengan memasang Amarino dan pluginnya:
Kelajuan mesin adalah sama dengan kecondongan telefon. Jika mesin bergerak ke arah yang salah, anda perlu menukar wayar dari enjin.