

Dalam video, anda dapat melihat bagaimana robot berfungsi. Ia beransur-ansur berubah warna semasa operasi.

Bahan dan alat untuk memasang robot:
- Kurungan pemasangan berbentuk U;
- empat bateri 1.5V LR44 masing-masing;
- RGB-LED berbilang warna dengan fungsi pensuisan;
- tiub penebat;
- pushpin keluli;
- Motor jenis voltan rendah RF-300CA;
- butang untuk menghidupkan robot (dengan dua petunjuk);
- wayar untuk menyambungkan enjin;
- Penggera berkelip LED.
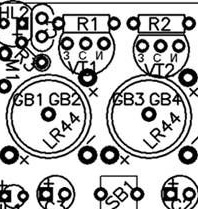

Mengenai yang diperlukan elektronik unsur-unsur, mereka ditunjukkan dalam angka tersebut. Papan litar bercetak diperbuat daripada lembaran foil PCB, dimensinya hanya 30X30 mm. Penulis juga mengesyorkan penggunaan kapasitor kutub kecil untuk pemasangan.
Proses pengilangan robot
Langkah pertama. Rajah skematik robot
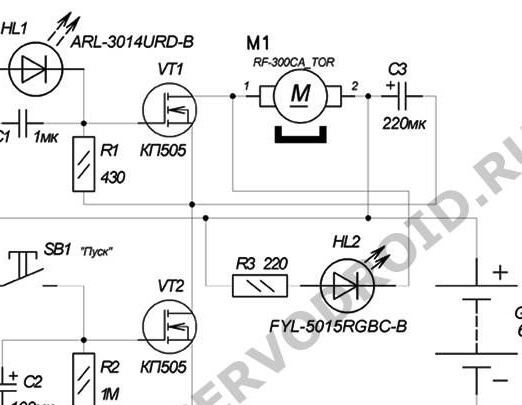
Litar robot dapat dilihat dalam gambar. Selepas memasukkan bateri, robot berada dalam keadaan mati, untuk menghidupkannya, tekan butang SB1. Sejurus selepas ini, kapasitor C2 dikenakan secara serta merta. Plat positif dari kapasitor disambungkan ke pintu masuk kesan transistor VT2. Dalam hal ini, apabila ambang bertukar tercapai, rintangan saluran sumber saliran saluran ini serta-merta berkurangan dan bentuk caj potensi negatif di longkang. Nah, apa yang berlaku seterusnya boleh dilihat lebih terperinci dalam rajah.
Langkah Dua Gunung RGB LED
LED di bawah nombor 1 dipasang di papan litar bercetak. Dalam lukisan, kedudukan ini dipanggil HL2. Setelah LED dipasang, kesimpulannya mesti ditekuk supaya LED diarahkan ke sisi. Oleh itu, semasa operasi, LED akan bersinar tidak, tetapi ke sisi, menerangi dinding. Di mana arah cahaya akan bersinar ditunjukkan oleh anak panah hitam.

Langkah Tiga Kurungan Mount Battery Mounting
Untuk memberikan hubungan antara bateri dan robot, pin tekan digunakan.Satu butang dipasang di tengah, dalam rajah ia ditandakan sebagai GB1, GB2, dan yang kedua ditetapkan ke kedudukan GB3, GB4. Untuk membetulkan kenalan dengan selamat, butang itu disolder dengan sejumlah besar solder.


Bateri dipasang pada butang logam di bawah nombor 3. Bateri ditetapkan dengan pengikat berbentuk U, di mana penebat dari tiub dipakai. Bahagian atas pendakap perlu sedikit bengkok dengan arka ke bawah, ini akan membolehkan bateri ditekan ke kenalan yang lebih rendah. Tiub penebat diperlukan supaya wajah menegak bateri tidak bersentuhan dengan yang mendatar.
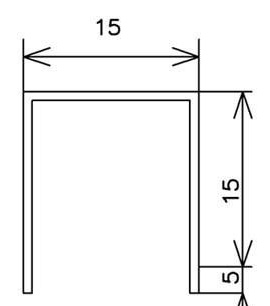
Untuk membuat pengikat berbentuk U, anda perlu menggunakan dua klip kertas. Mereka perlu dibengkokkan ke dalam bentuk U, seperti yang ditunjukkan dalam lukisan. Mana-mana tiub boleh digunakan, polyvinyl chloride digunakan di sini. Ketinggian mereka harus sama dengan ketinggian bateri.
Pasang pendakap dengan penyolderan, untuk ini anda perlu menamatkan hujungnya. Untuk tinning, perlu menggunakan fluks neutral, tanpa cuci.
Langkah Empat Pasang motor
Motor dipasang di tepi papan di mana trek lulus, ia terletak dengan batang bawah. Untuk mengikat motor, anda boleh menggunakan gam panas atau pita bermuka dua. Tetapi sebelum anda memasang enjin dengan ketat, anda perlu menyambungkannya dan memeriksa seluruh sistem untuk operasi.

Langkah Lima Persediaan dan ujian buatan sendiri
Selepas memasang robot, anda boleh menguji dan mengkonfigurasi. Untuk melakukan ini, anda perlu memasang bateri di robot, ia dipasang di tempat GB1, GB2 dan GB3, GB4. Dalam kes ini, elektronik mestilah berada di luar negeri. Selepas memasang bateri, robot boleh dihidupkan, ini dilakukan dengan menggunakan butang SB1. Selepas menekannya, enjin itu mula berfungsi, LED HL1 akan berkelip, dan LED RGB juga akan menyala.
Selepas beberapa lama, robot akan dimatikan secara automatik, ia akan berhenti dan semua diod akan keluar. Ia kemudiannya dihidupkan dengan cara yang sama seperti buat kali pertama, dengan menekan butang.

Untuk menyesuaikan masa robot, anda perlu mencuba dengan nilai-nilai perintang R2 dan kapasitor C2, mereka bertanggungjawab untuk fungsi ini. Jika anda perlu menetapkan operasi maksima robot, maka kapasitansi kapasitor harus serendah mungkin. Dengan cara yang mudah, anda boleh memasang robot yang menarik seperti itu.