

Artikel ini akan mempertimbangkan contoh untuk membuat robot legendaris yang disebut "Canbot". Sebahagian besar butiran untuk robot dicetak pada pencetak 3D. Robot dikawal dari jauh.
Bahan dan alat untuk buatan sendiri:
- Satu mikrokontroller Satu Atmel Attiny85;
- dua microservices HXT900 atau analog mereka;
- satu bateri LiV 3.7V;
- satu penerima inframerah pada 38kHz;
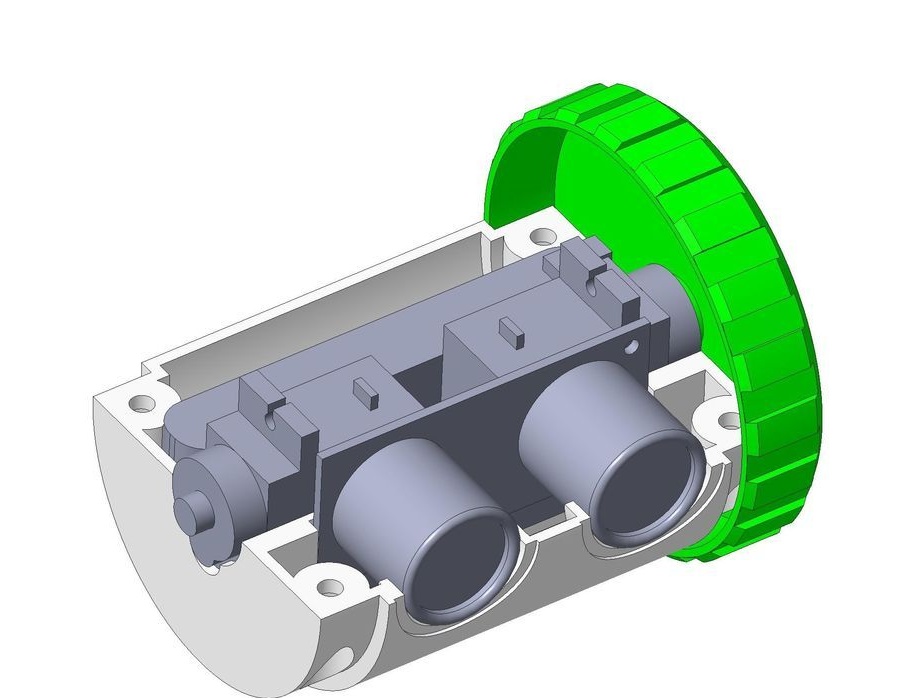
- jenis transduser ultrasonik HC-SR04;
- Suis atau pelompat 9x4mm;
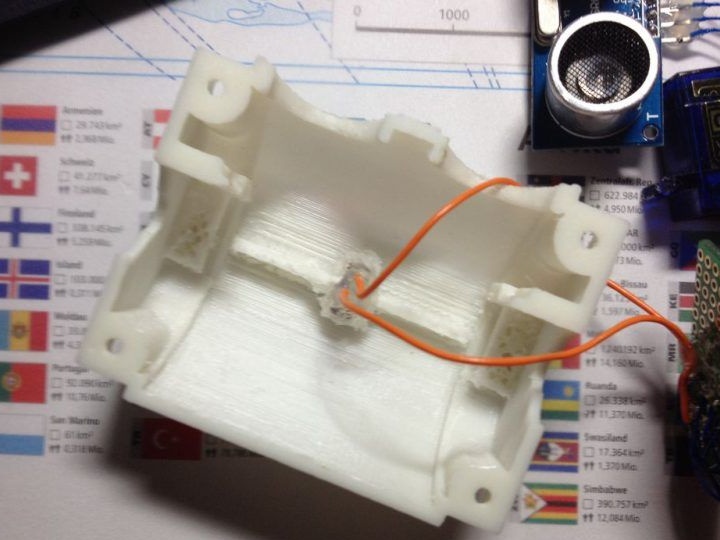
- Bahagian 3D (mungkin). Ia akan mengambil satu bahagian atas (top.stl), satu bahagian bawah (bottom.stl) dan dua roda (wheel.stl).
Sudah tentu, alat pematerian, gam panas, alat pemutar skru, skru, wayar dan lain-lain perkara kecil akan diperlukan.

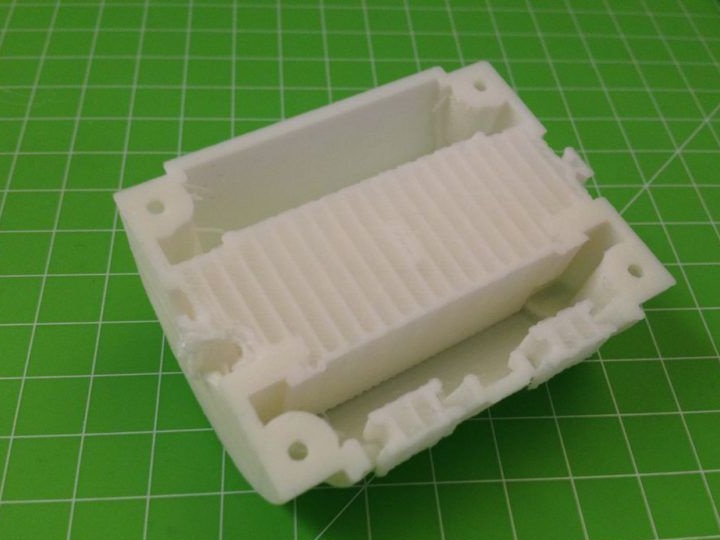
Bahagian atas dan bawah perlu dicetak di sebelah bawah menggunakan pilihan "struktur sokongan". Bergantung pada jenis pencetak yang digunakan, bahagian yang siap perlu dibersihkan pada akhir.
Proses pembuatan robot:
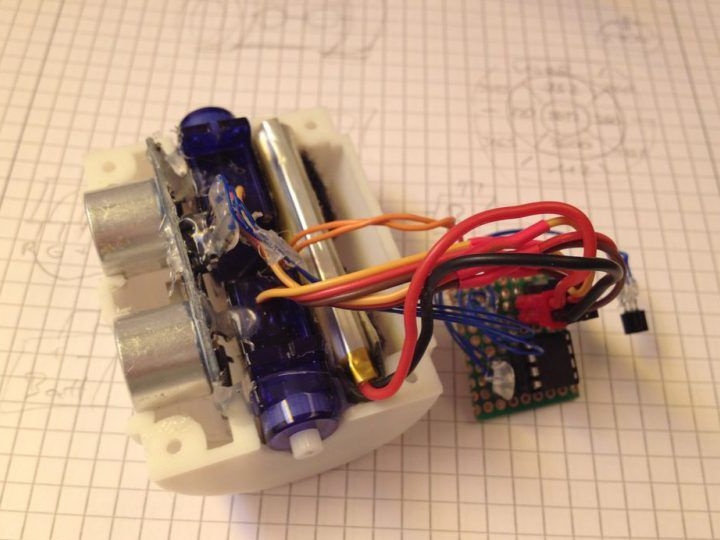
Langkah pertama. Elektronik sebahagian robot
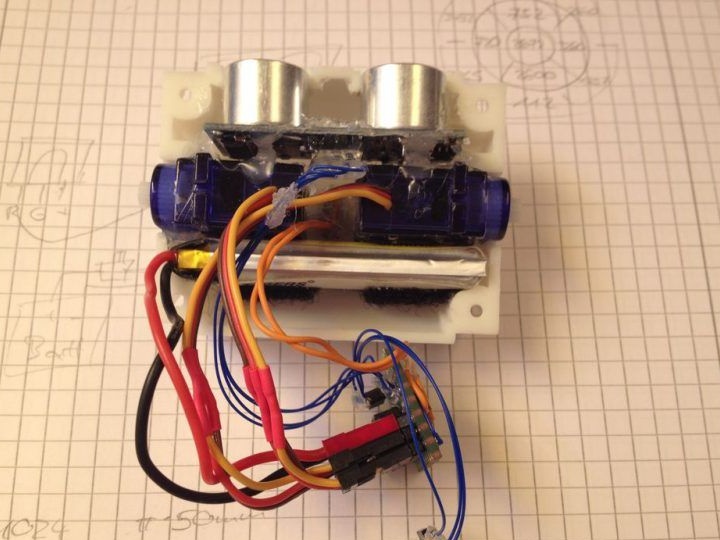
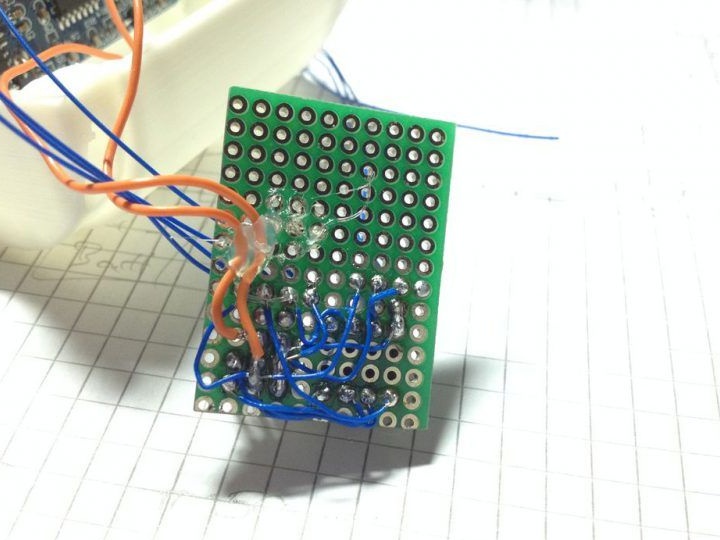
Pertama anda perlu mengkonfigurasi servos, mereka perlu ditukar kepada putaran berterusan. Bagaimana untuk melakukan ini, terdapat banyak arahan di Internet. Nah, maka semua elemen elektronik perlu dipasang seperti ditunjukkan dalam gambar rajah. Untuk memasang bahagian elektronik adalah mudah, anda boleh mengambil sekeping kecil papan roti, serta wayar nipis.


Langkah Dua Bahagian perisian robot
Jika anda mendekati proses membuat robot dengan profesionalisme tertinggi, maka bahagian perisian boleh ditulis secara bebas. Tetapi untuk ini anda perlu belajar bahasa pengaturcaraan. Dalam versi yang lebih mudah, anda boleh memuat turun kod siap pakai dan hanya memuat naiknya ke mikropengawal.
Menurut penulis, yang terbaik robot itu menerima isyarat inframerah daripada kawalan jauh jenama Sony. Pada masa akan datang, ia perlu untuk "reflash" bahagian kod Arduino dan output data melalui fungsi Serial.print (). Akibatnya, mungkin untuk mengetahui pengekodan apa pada setiap butang.
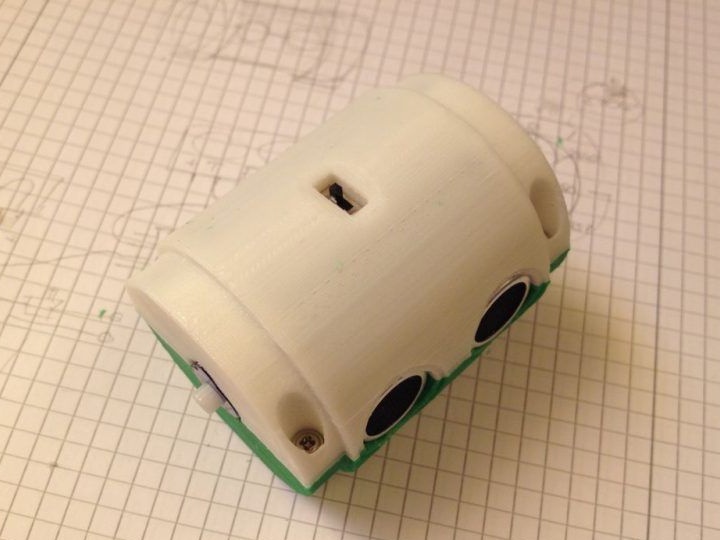
Langkah Tiga Peringkat terakhir. Kumpulkan robot itu
Nah, kesimpulannya, robot sedang berjalan. Untuk tujuan ini, anda memerlukan gam panas. Dengan itu, anda perlu menetapkan wayar agar tidak bergerak ketika robot bergerak.Ia juga perlu untuk menetapkan suis dan menetapkan sensor ultrasonik dengan baik. Kesimpulannya, penutup robot disambungkan menggunakan empat skru, sebagai akibatnya, jika perlu, ia dapat dengan mudah disassembled. Dengan cara ini, skru untuk servos sesuai untuk pemasangan.

Itu sahaja, kini robot itu hampir siap. Ia tetap memasang roda pada servomotor aci dan anda boleh mula menguji robot. Anda dapat melihat secara terperinci bagaimana kerja buatan sendiri pada video.