
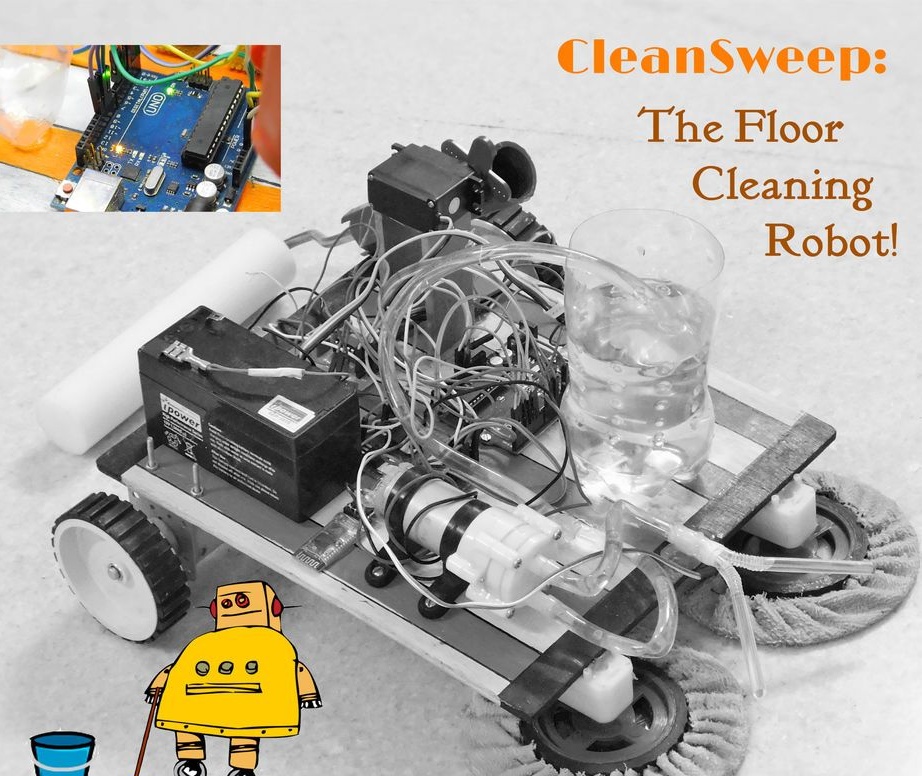


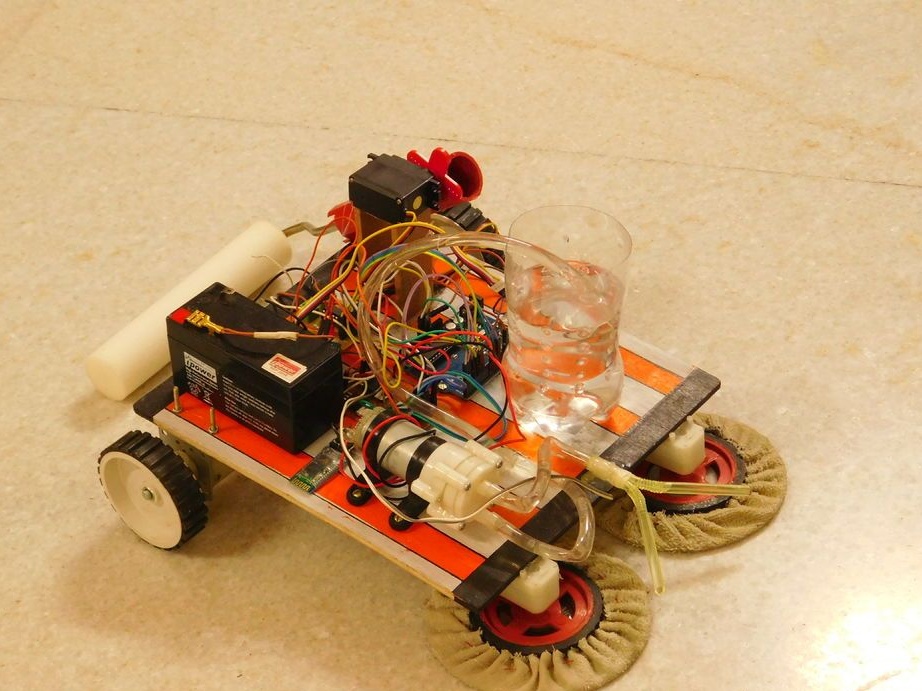
RobotPenuai itu ada di dalam gudangnya dua berus berputar yang dipasang di depan batang gearmotor. Kotak gear berputar pada kelajuan 75 rpm. Robot ini mempunyai tangki air di atas kapal. Roller dipasang di bahagian belakang robot. Robot dicampur dengan bantuan roda yang dipasang pada paksi gear pemotor. Pembersih dikawal oleh telefon pintar melalui bluetooth. Pada masa akan datang, Master merancang untuk membuat robot itu sepenuhnya autonomi. Mari lihat bagaimana peranti ini berfungsi.
Alat dan bahan:
-Motor gear 100 rpm -2 pcs;
-Beli untuk mesin -2 pcs;
-Motor-reducer dengan roda 75 rpm - 2 pcs;
-Arduino UNO;
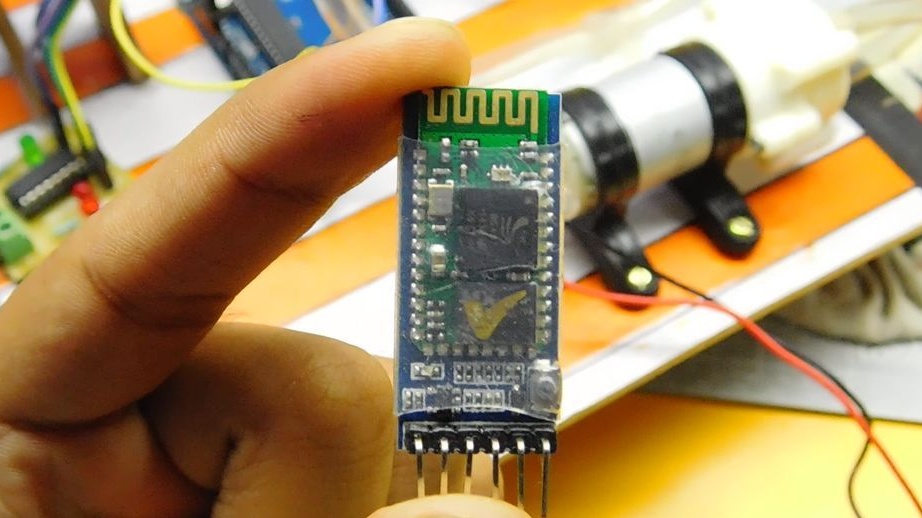
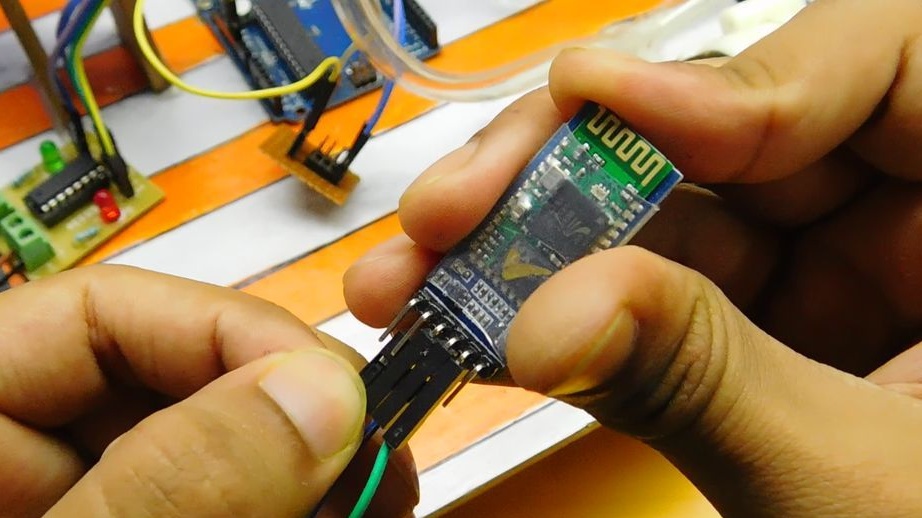
- Modul Bluetooth HC-05/06;
-Driver L293D;
- Servomotor (putaran 180 darjah);
-12V bateri;
- Pam 12 V;
Transistor TIP31C;
Transistor TIP122;
- Pemacu CD - 2 pcs;
- Penggelek cat;
- Tuala kain;
- Jarum dengan benang;
-Tube;
-Wire;
- Pelompat;
-Mount board;
-Fasteners;
-Plywood;
-Plastik botol;
-Pemeterian besi;
-Glue gun;
-Drill;
- Tang;
-Dremel;
- berus;
-Paint;
-Marker;
- gunting;











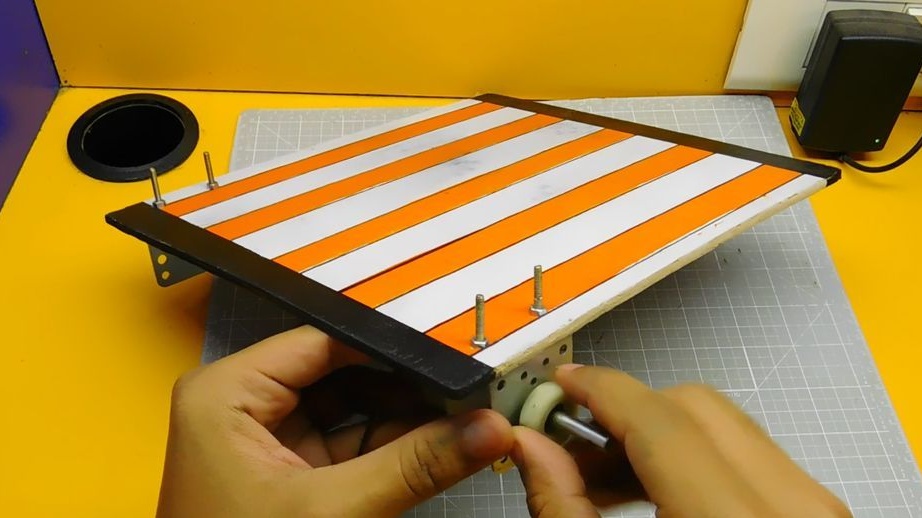
Langkah Pertama: Yayasan
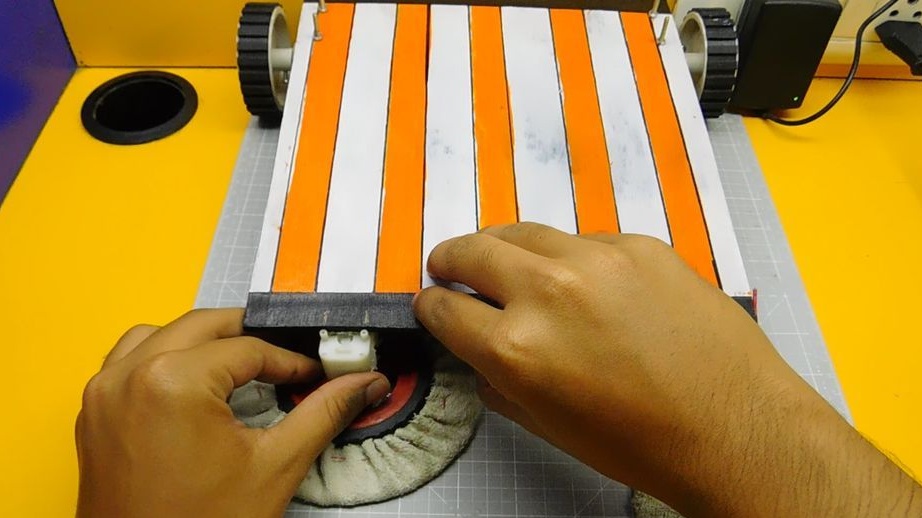
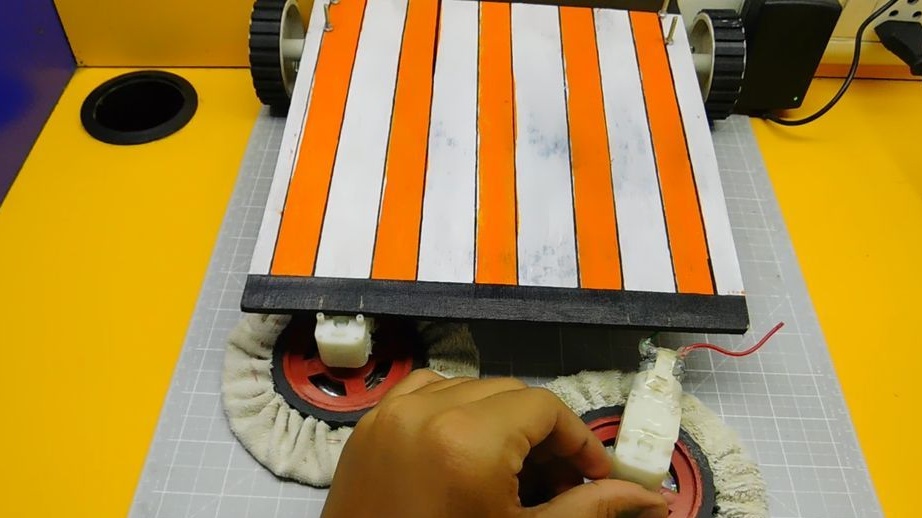
Dari papan lapis memotong pangkalannya. Saiz asas ialah 30 * 22 cm. Cat asas. Di satu pihak, ia membaiki motor gear. Secara sepusat memperbaiki motor gear di bahagian lain pangkalan.



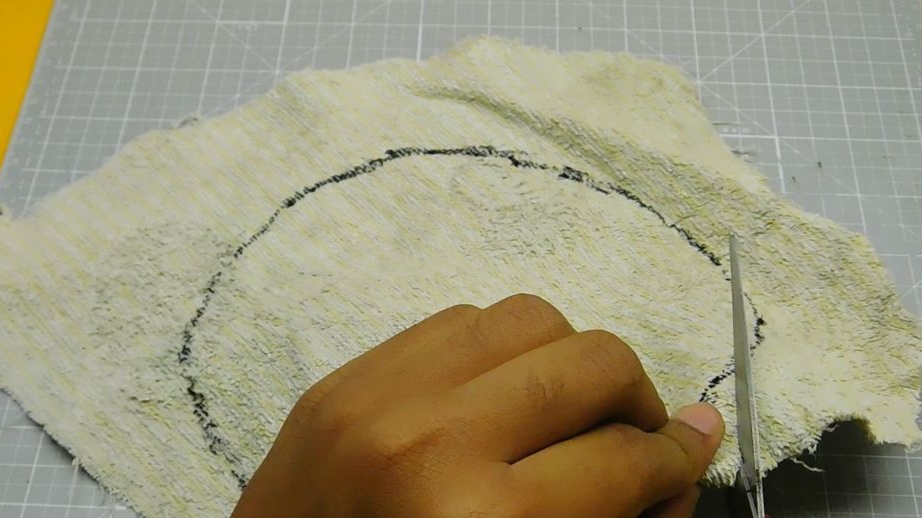
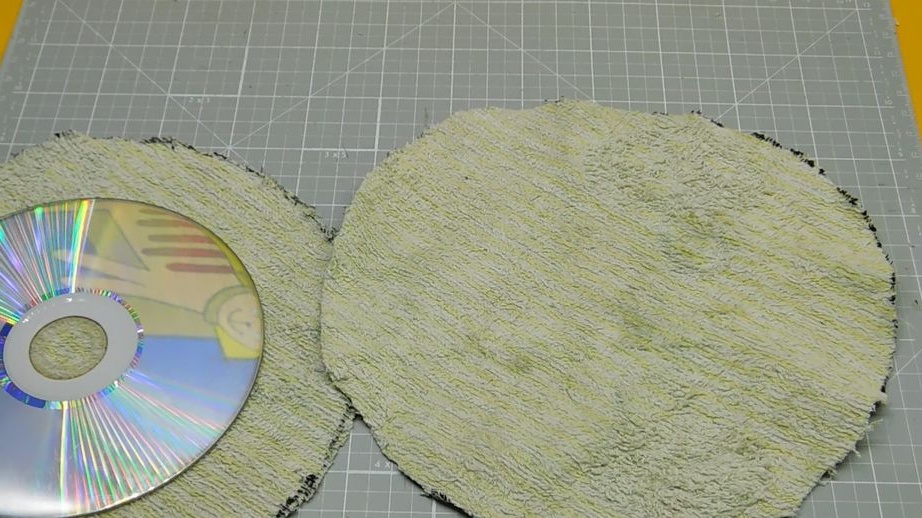
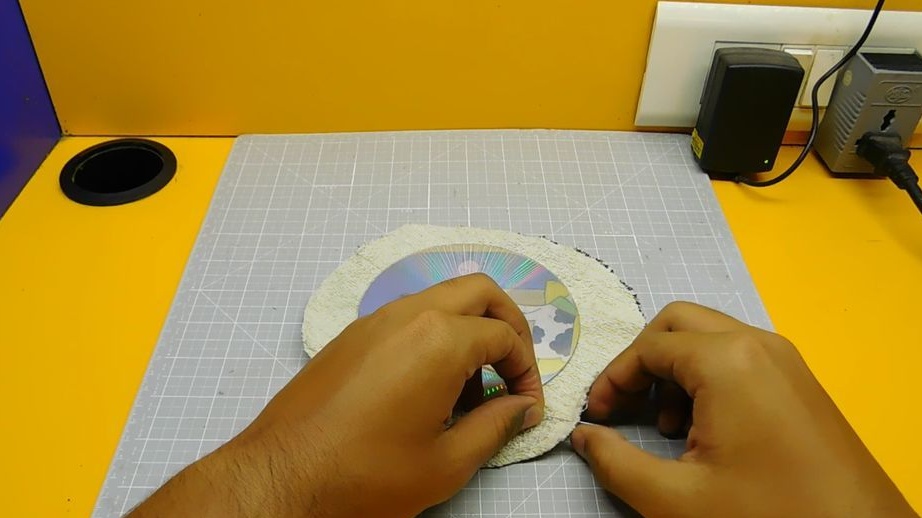
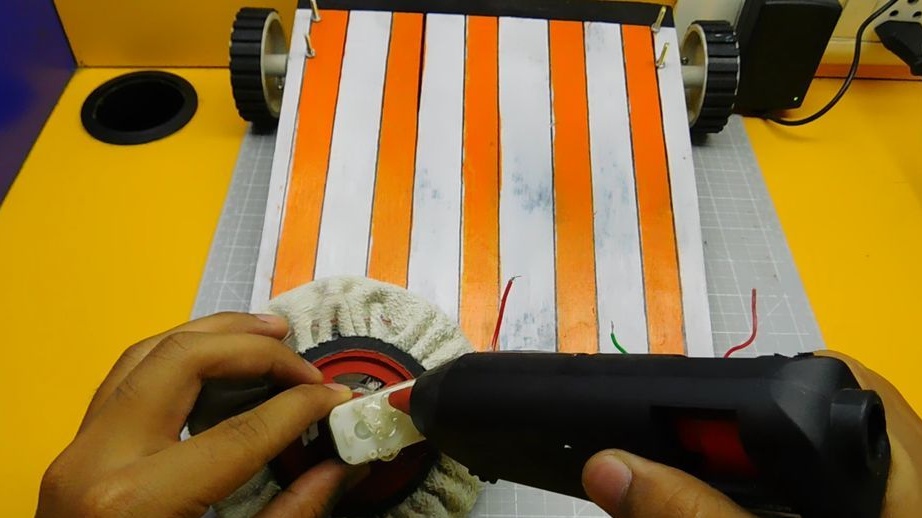
Langkah Dua: Berus
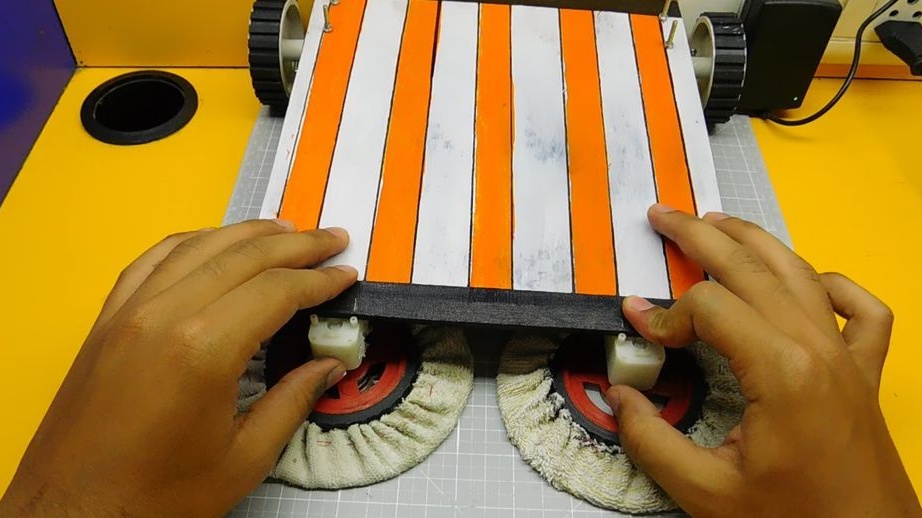
Sarjana membuat berus dari CD lama. Potong kain. Memandangkan dia memandu. Operasi berulang dengan cakera yang lain. Mengamankan cakera dengan pelekat mencairkan panas pada roda roda gear. Mengamankan kedua-dua motor gear di hadapan platform.








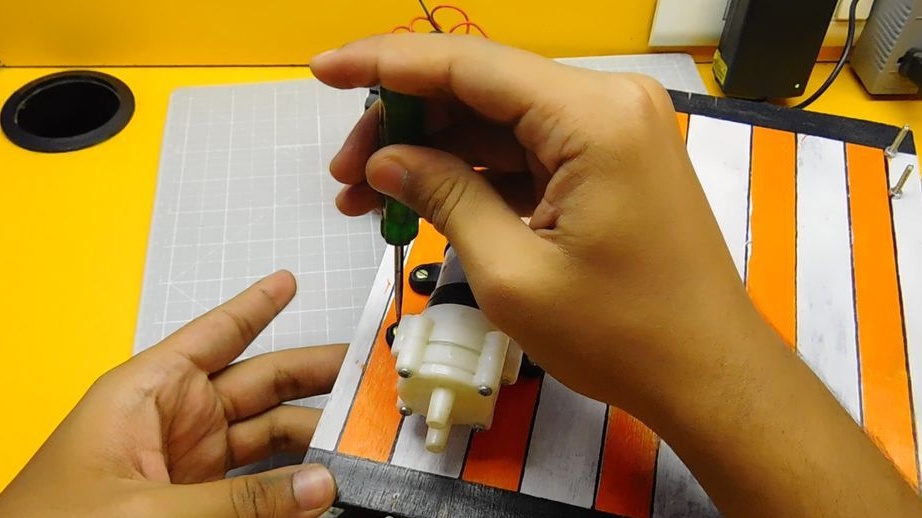
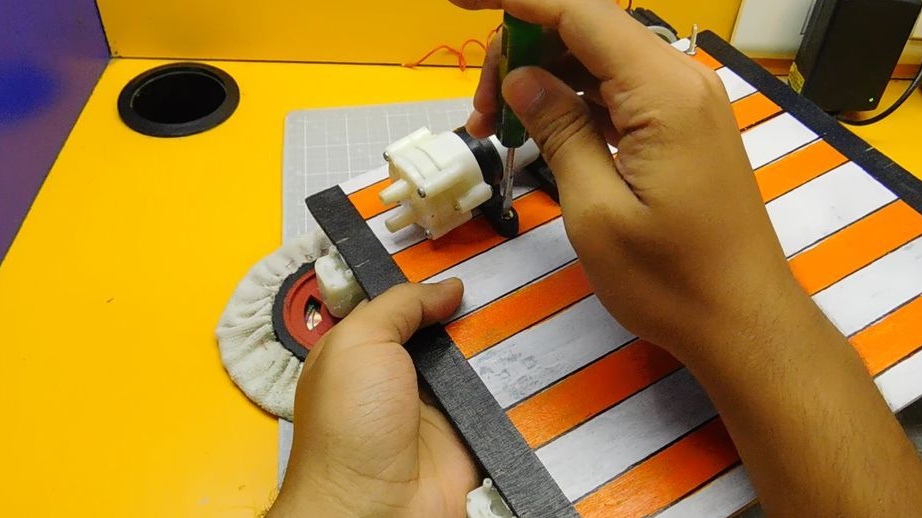
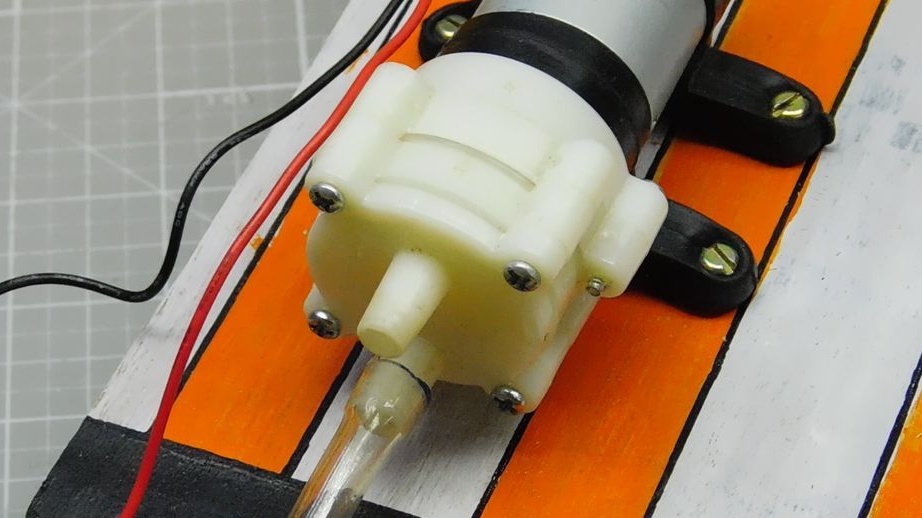
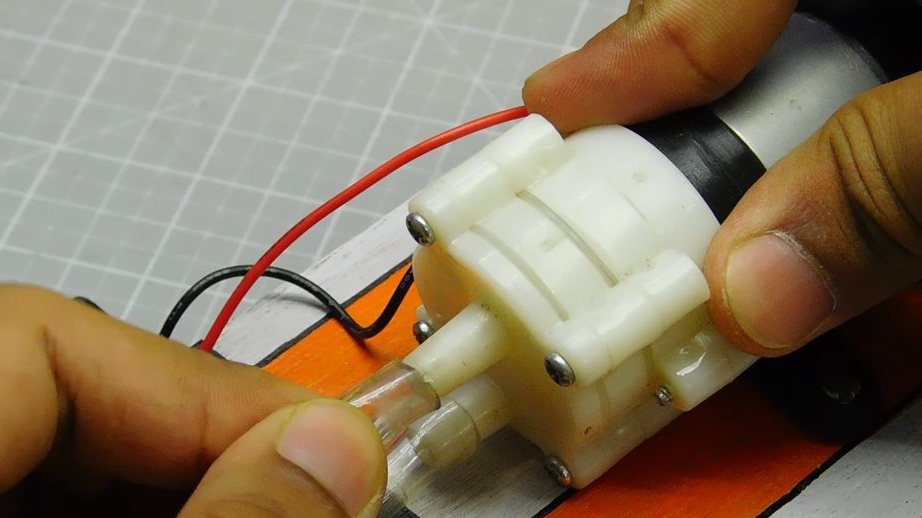
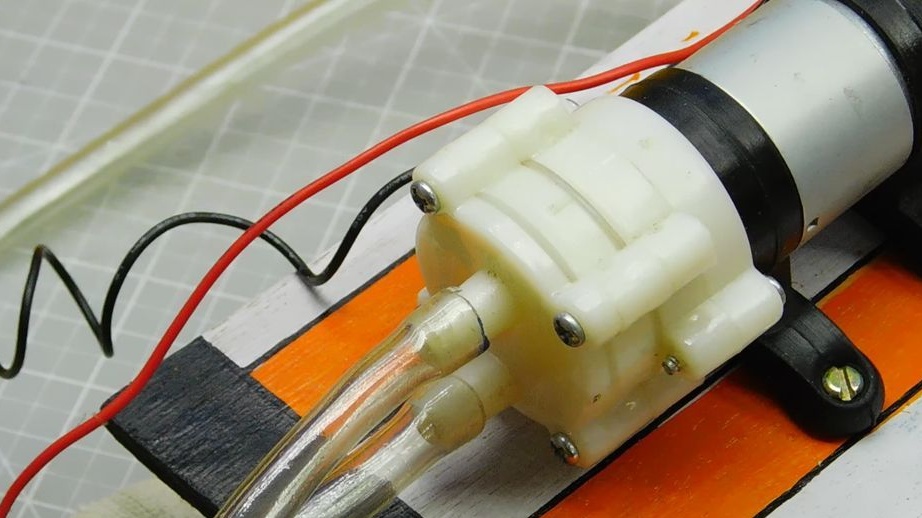
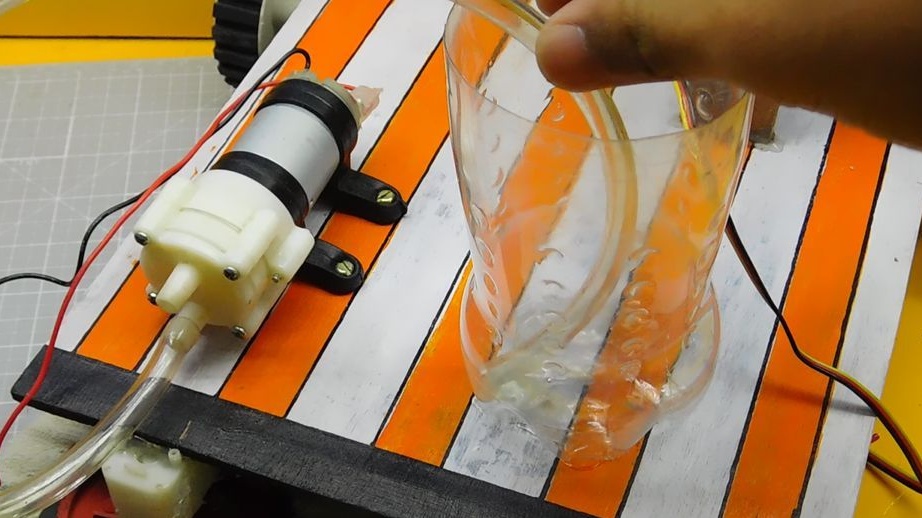
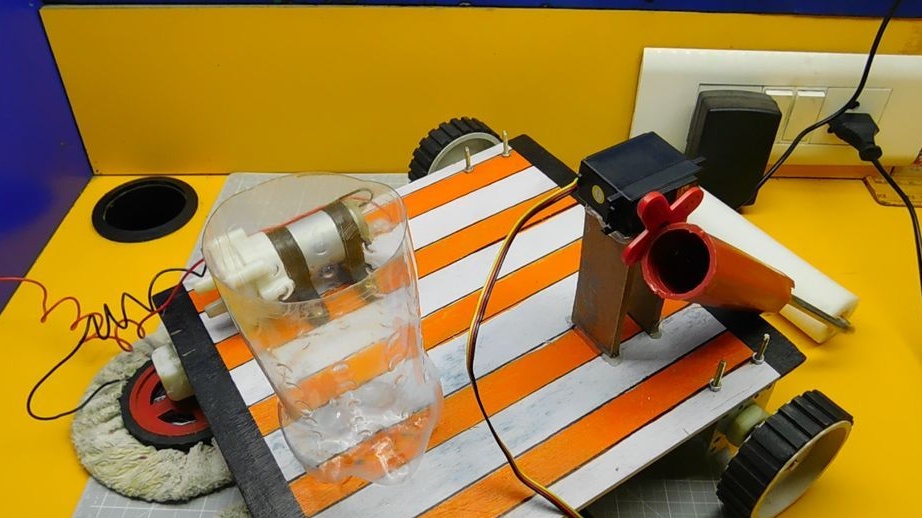
Langkah Kedua: Bekalan Air
Selamatkan pam ke platform. Memotong bahagian atas botol plastik. Selamat botol ke platform. Memasang paip pengambilan air. Kemudian, paip bekalan air ke berus akan ditetapkan.




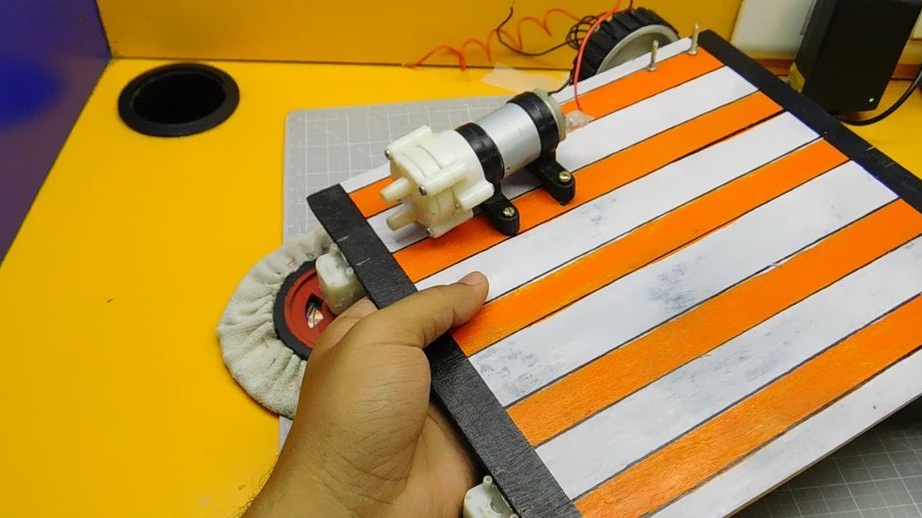




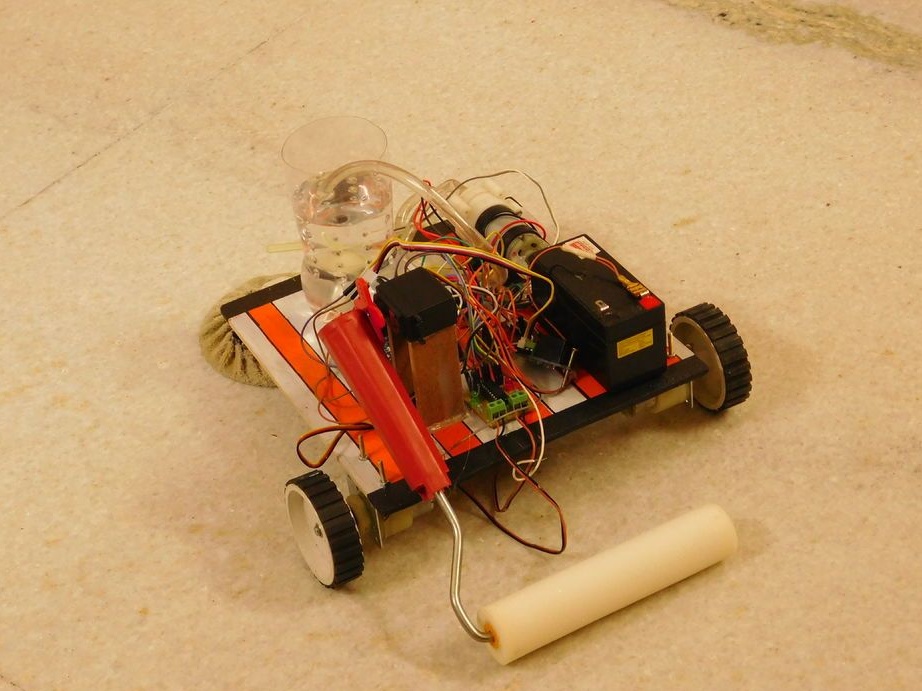
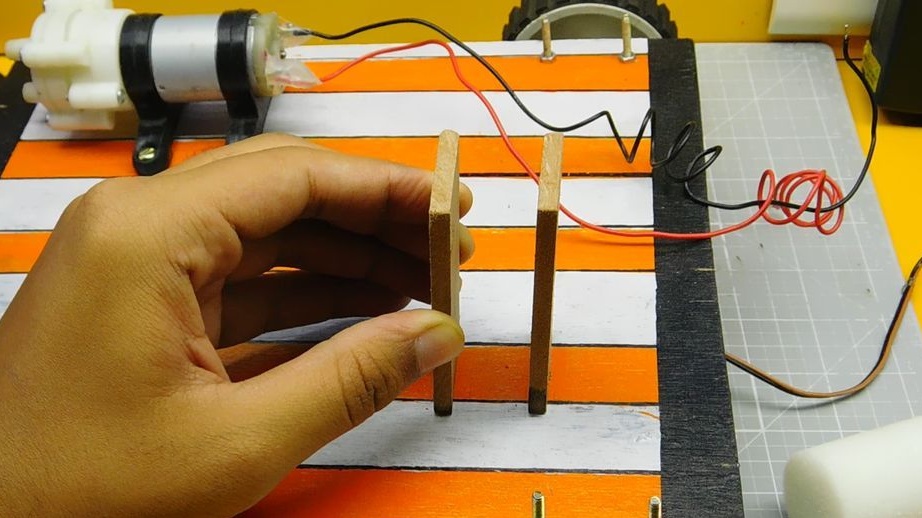
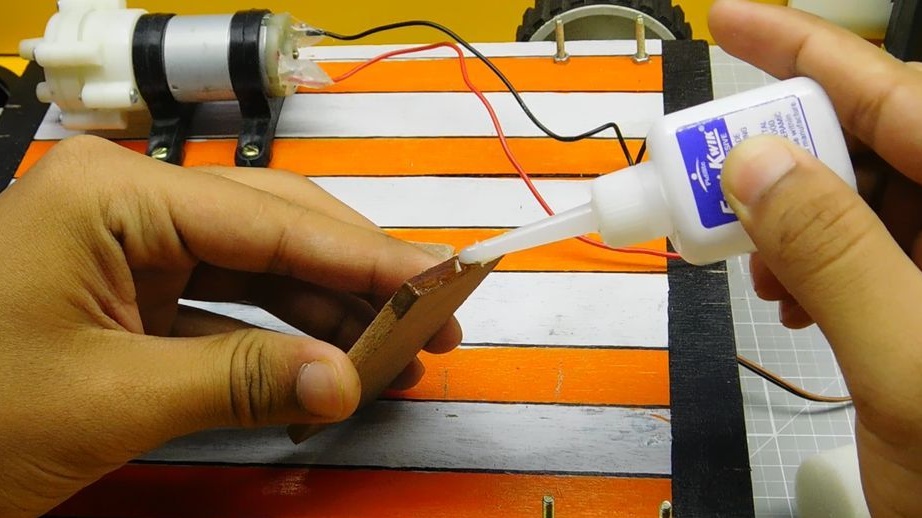
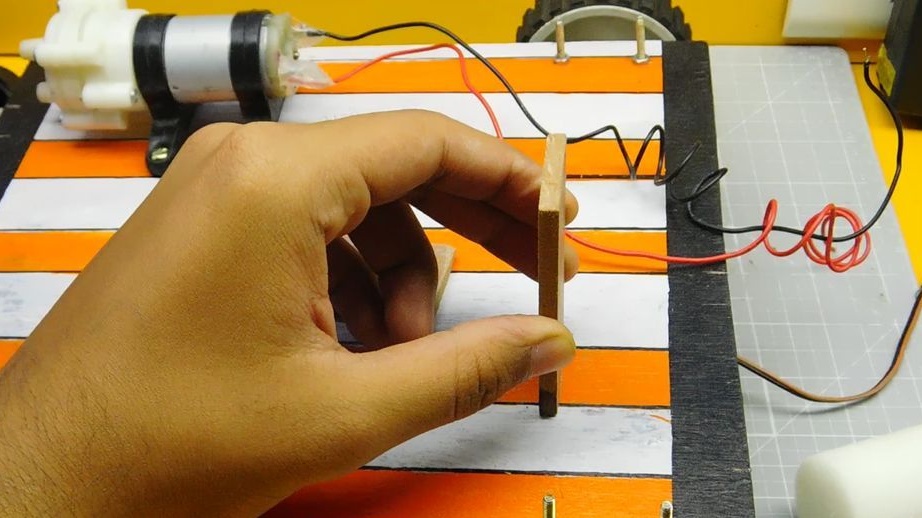
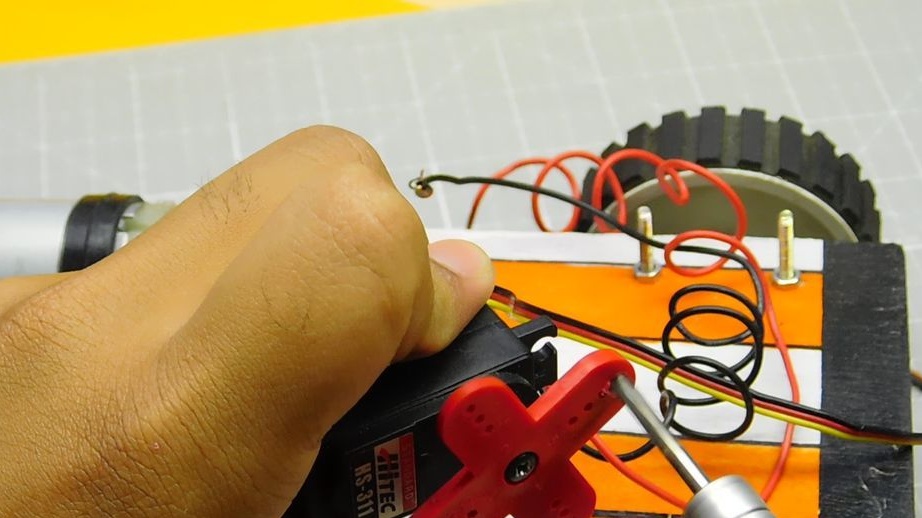
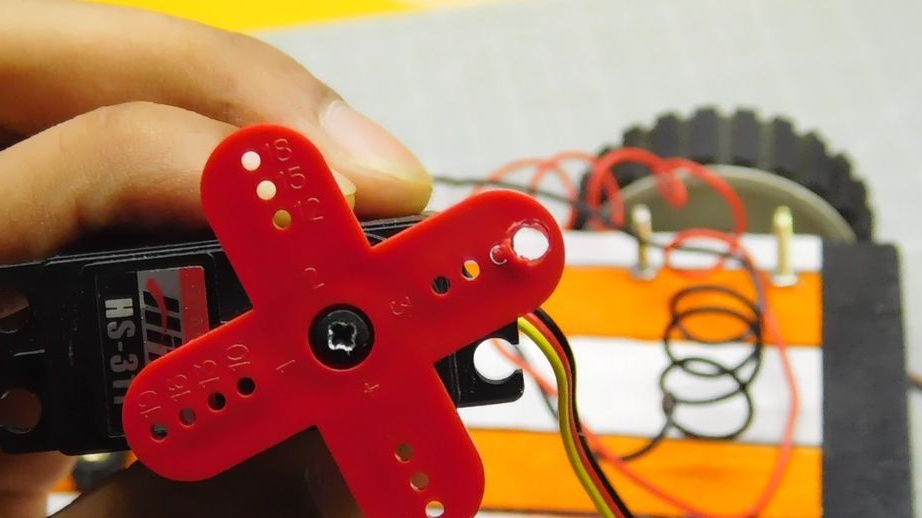
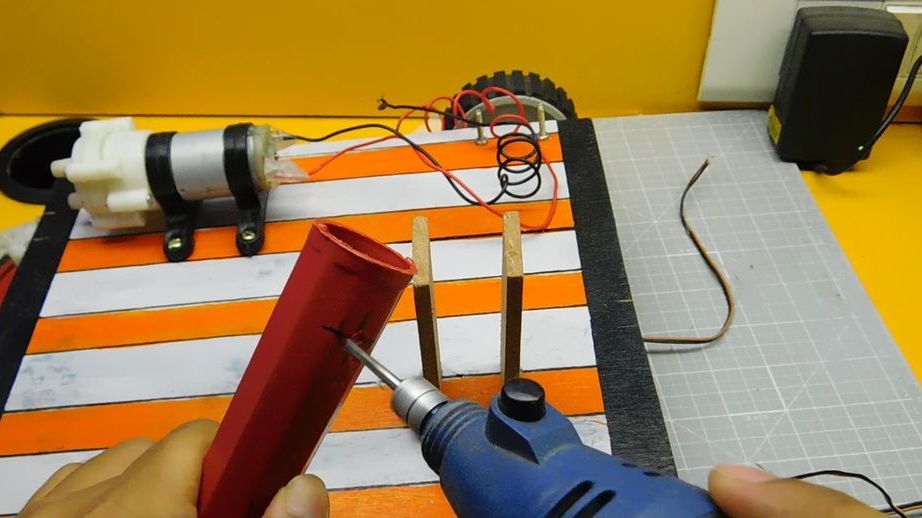
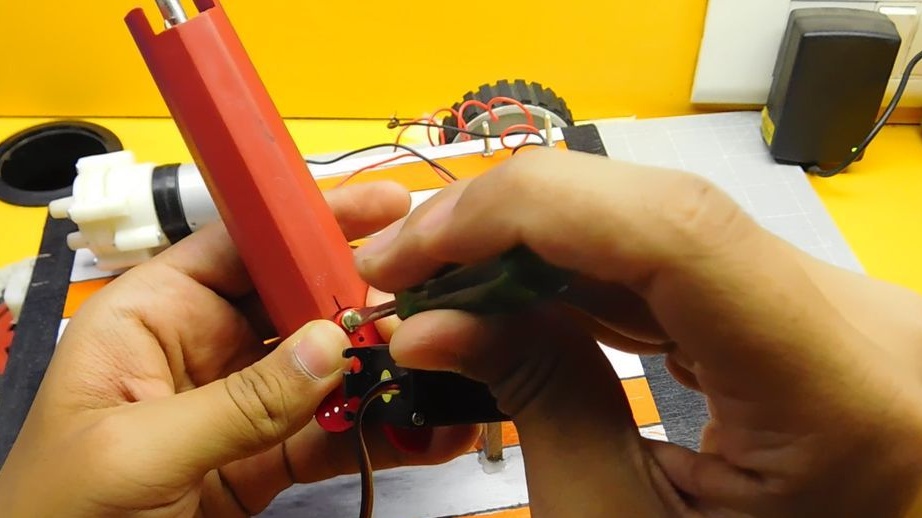
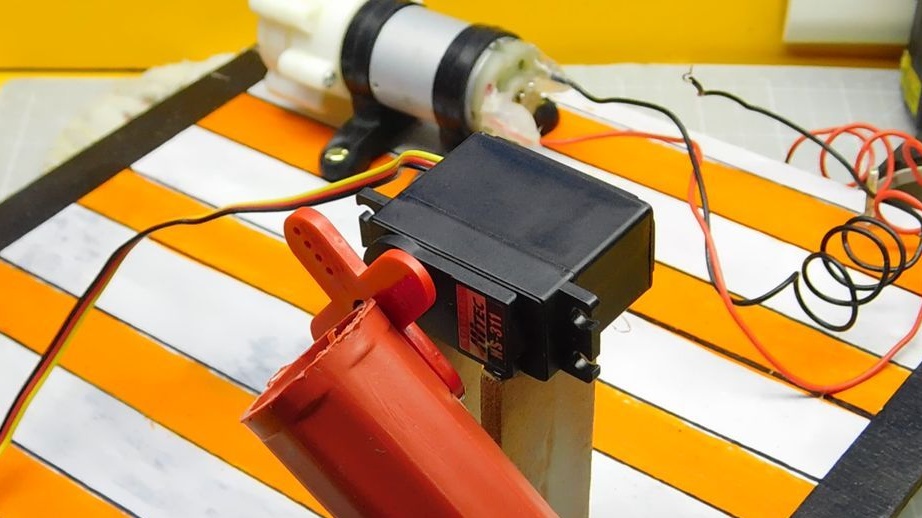
Langkah Tiga: Mekanisme Lif Roller
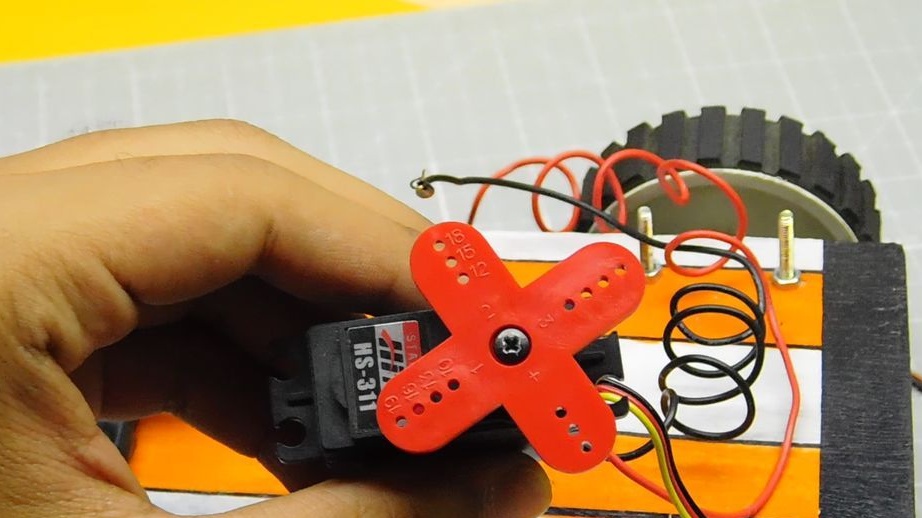
Tugas roller adalah mengumpulkan debu halus. Sejak roller kadang-kadang diperlukan, tuan memutuskan untuk membuat mekanisme untuk menaikkan dan menurunkan roller. Memperbaiki dua bilah pada platform sejajar antara satu sama lain. Membuat dua lubang, satu di servo tuil, yang kedua dalam pemegang roller. Skru pemegang roller ke tuil. Selamat servo ke selat.


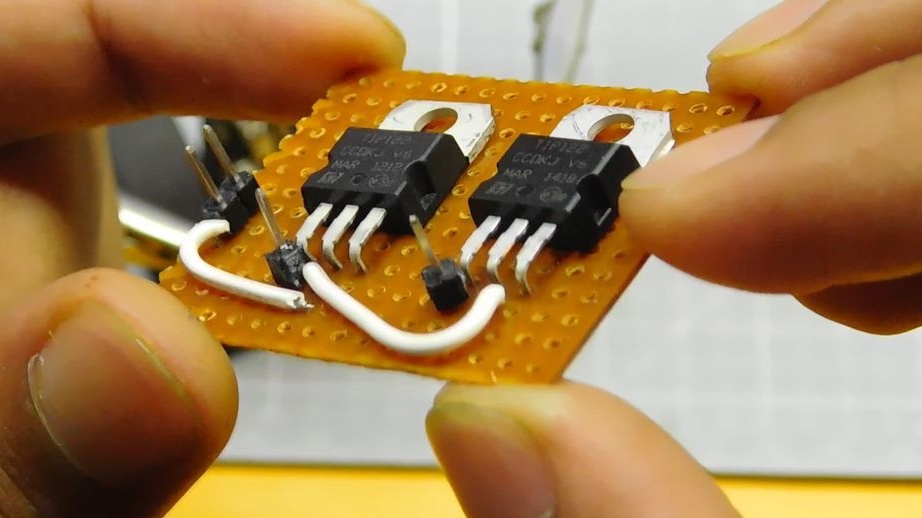
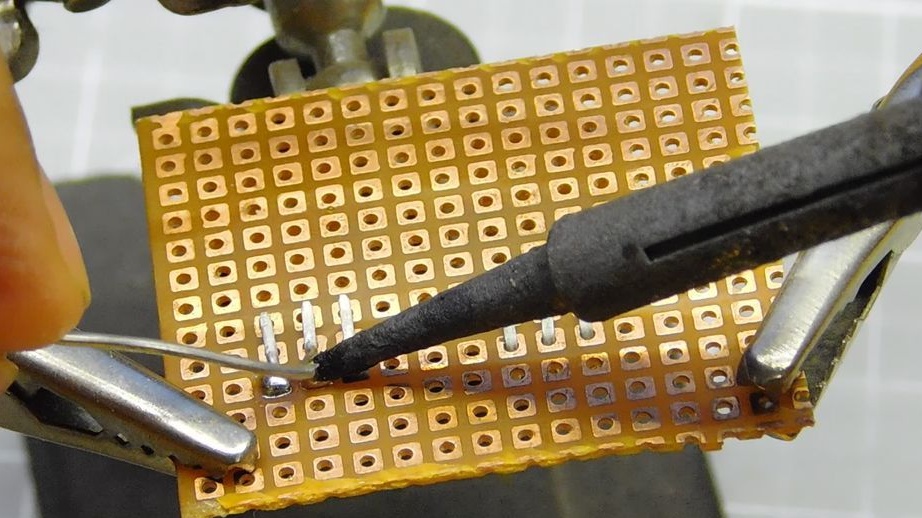
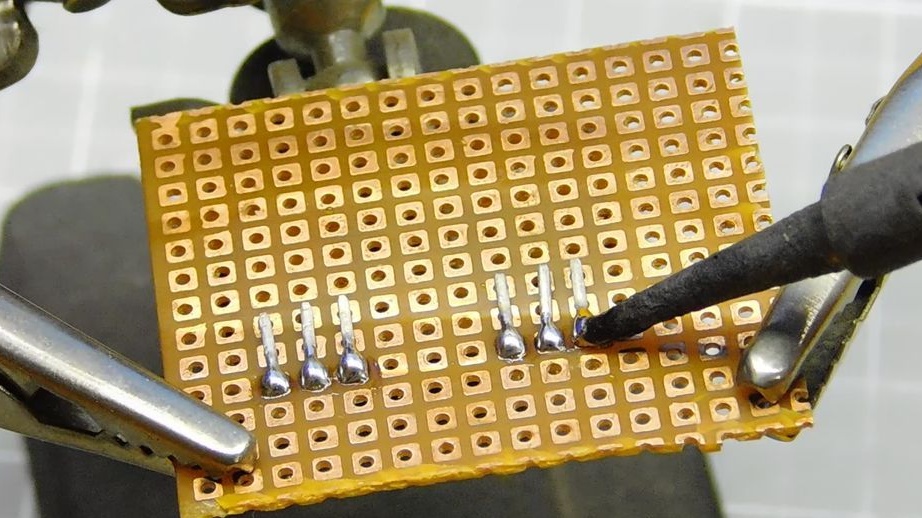
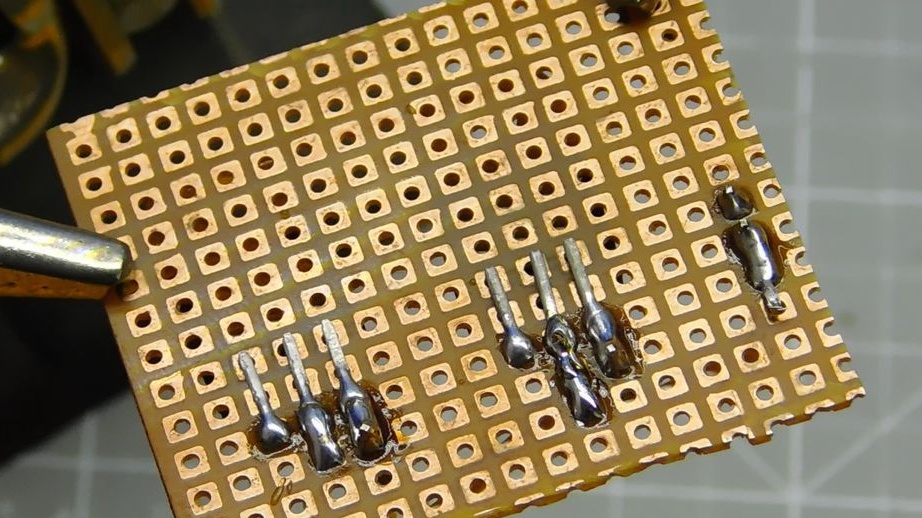
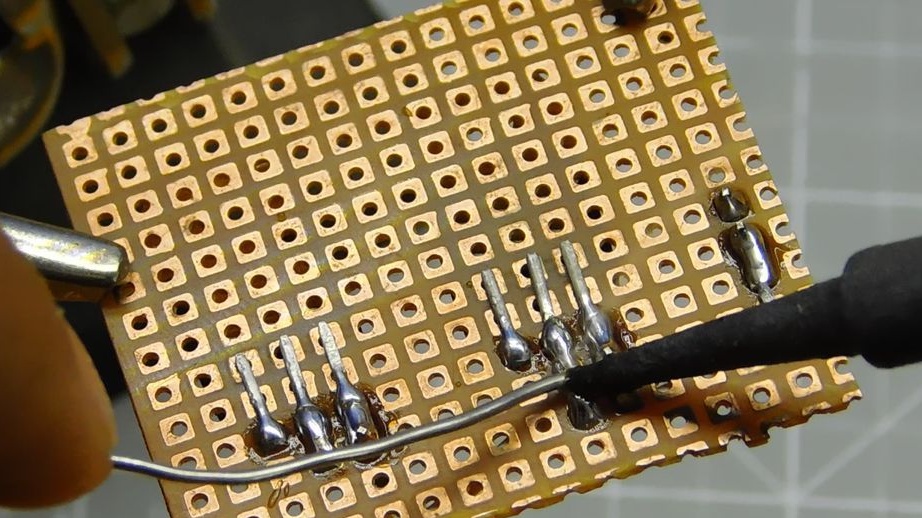
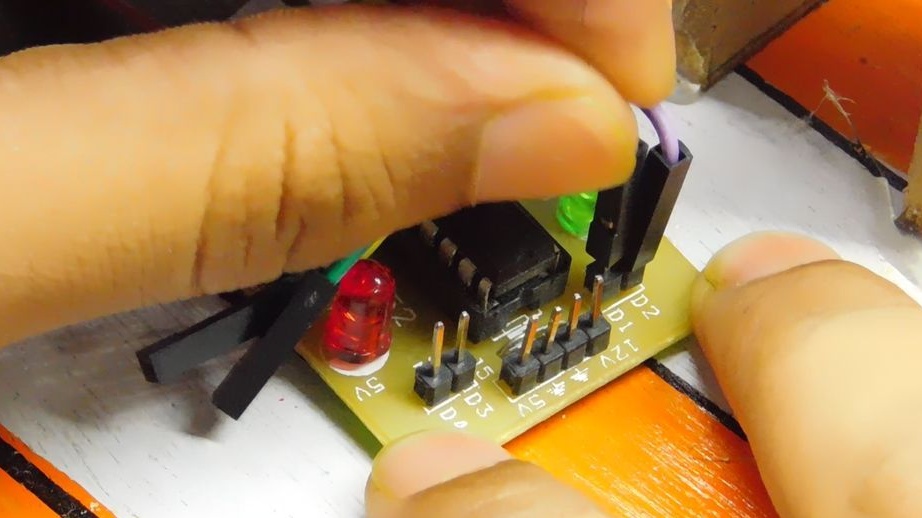
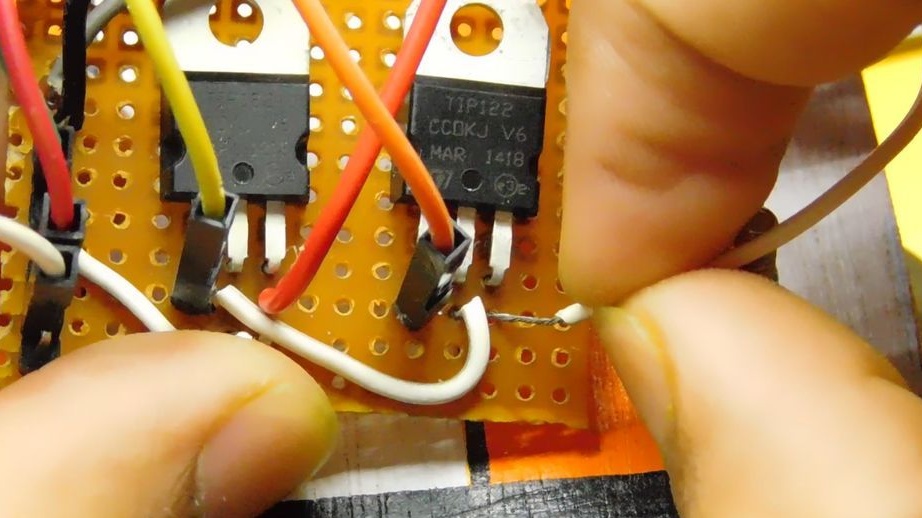
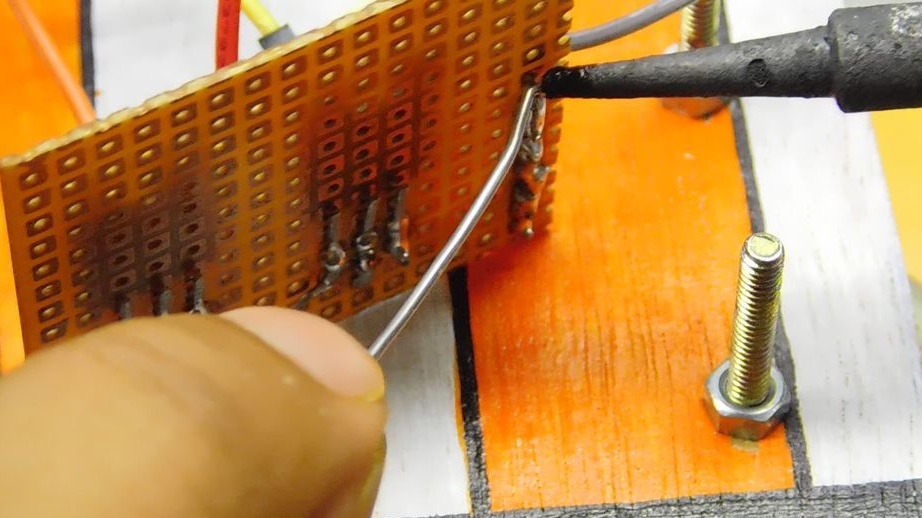
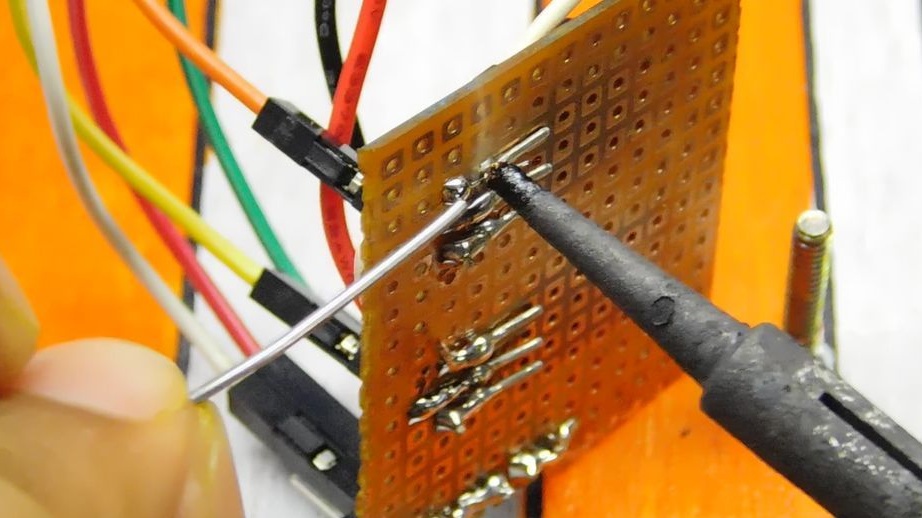
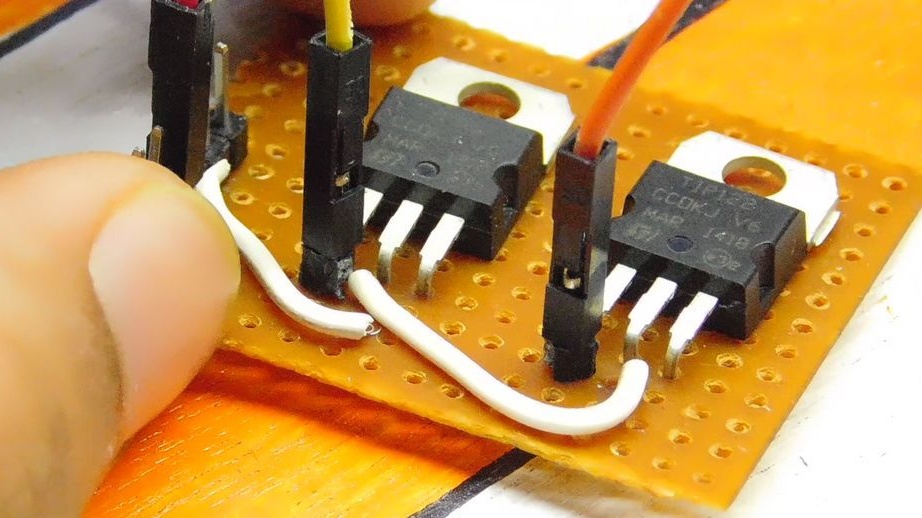
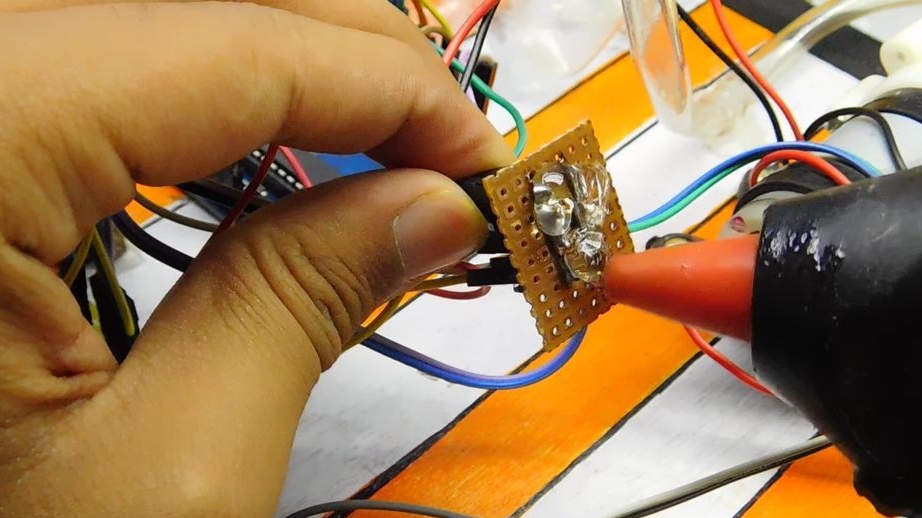
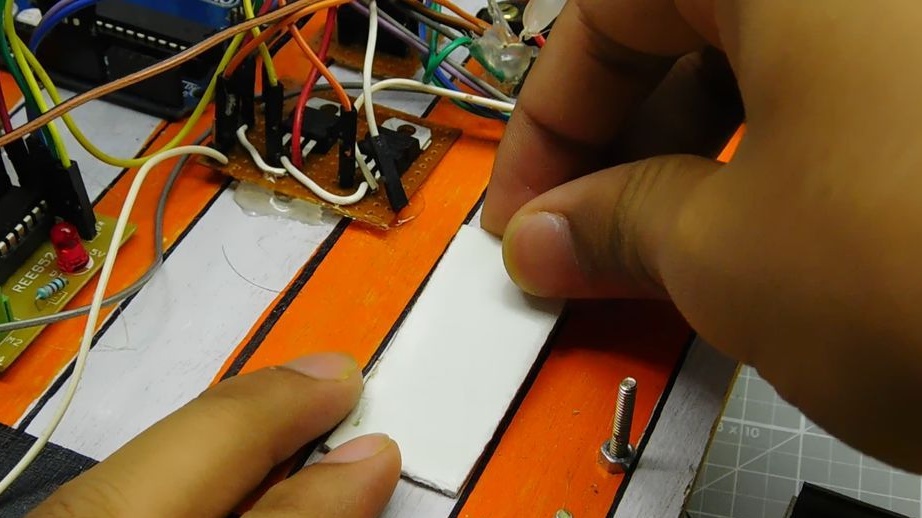
Langkah Empat: Transistor
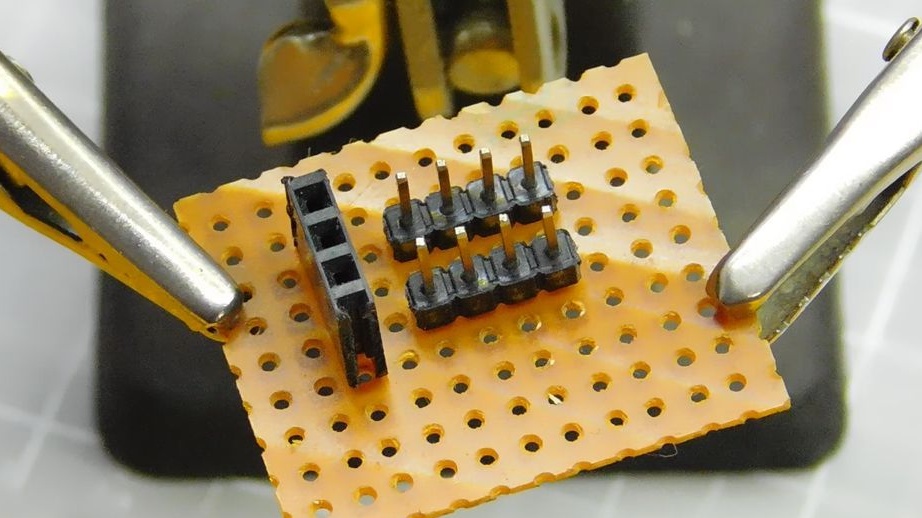
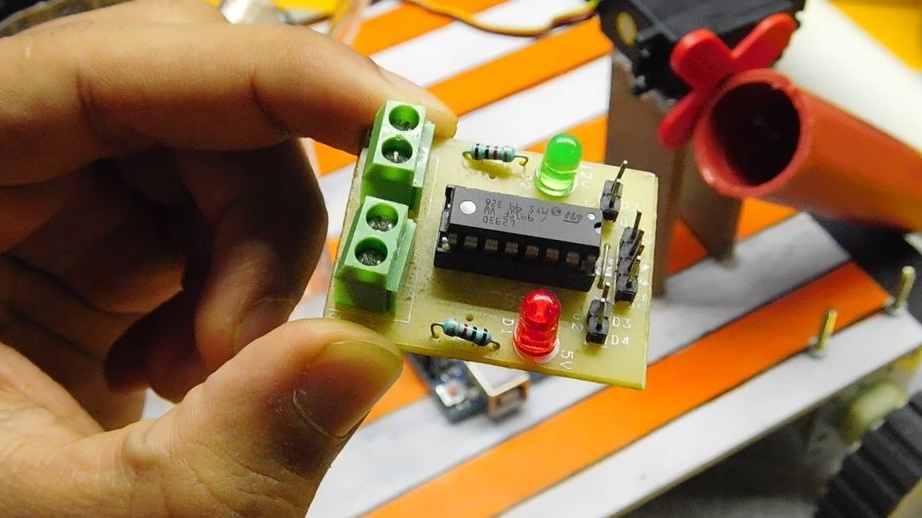
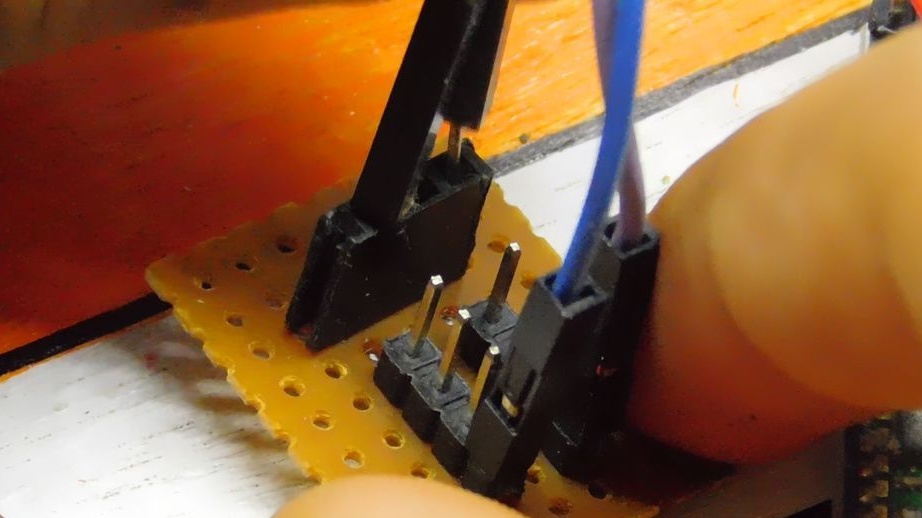
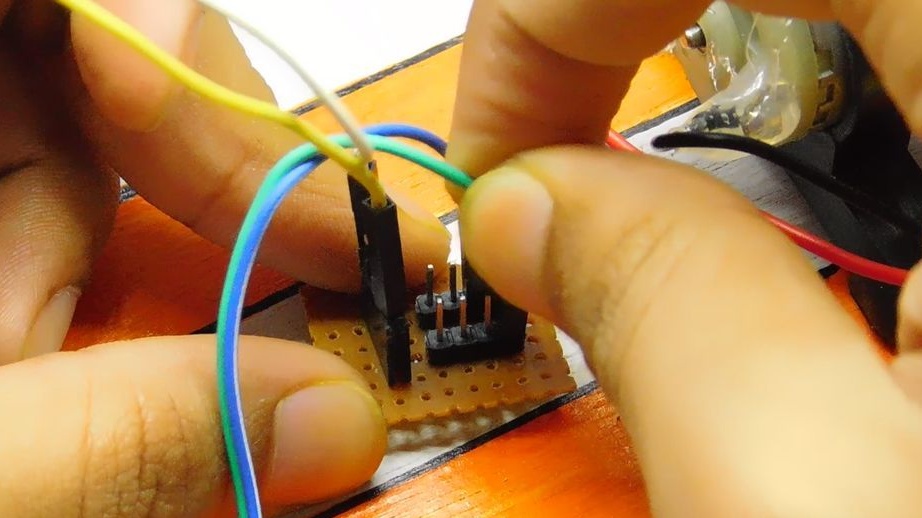
Untuk pam air dan motor, kuasa 12 V diperlukan.Tetapi, sejak Arduino memberikan hanya 5 V, tuan mengumpul litar pada transistor TIP122.Juga, penyihir menambah beberapa + 5V dan Gnd pin ke papan litar.
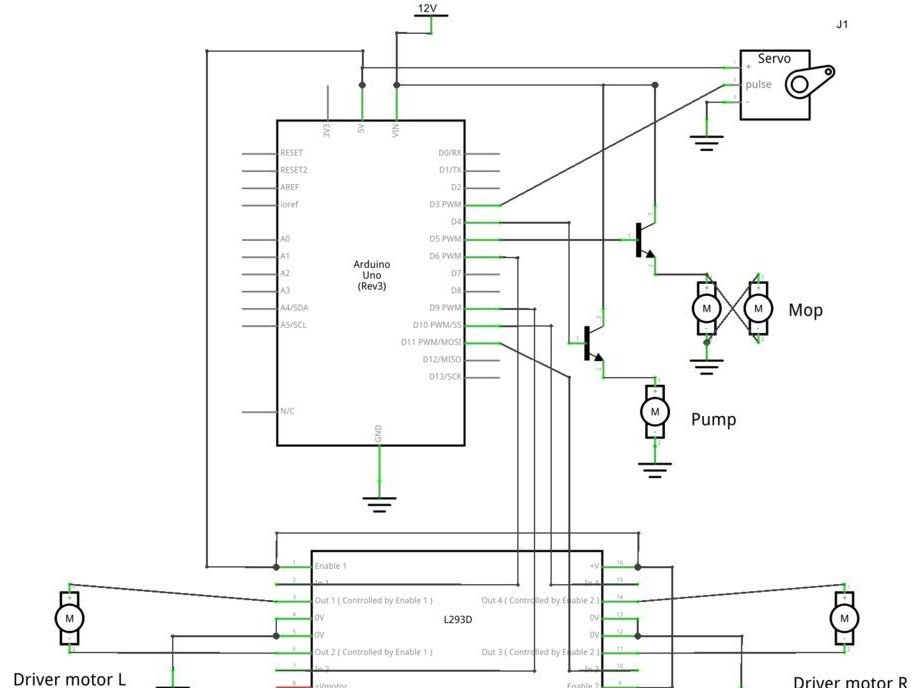
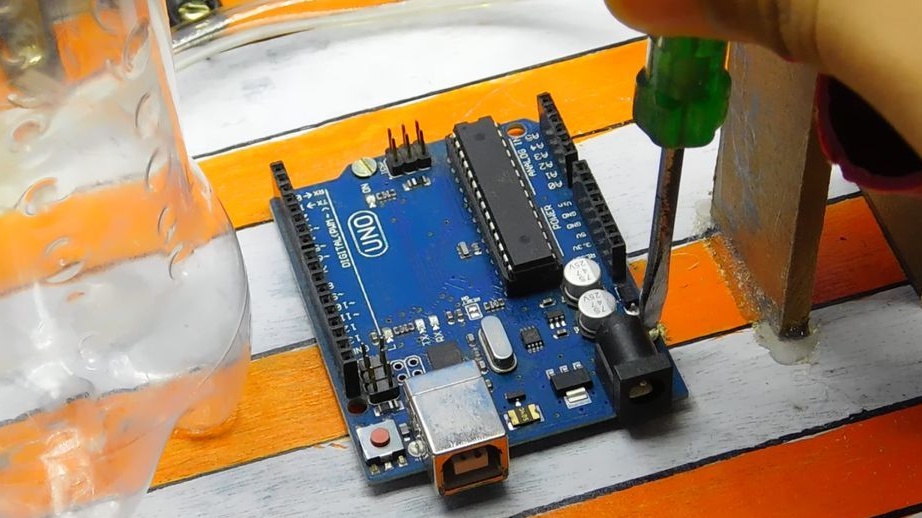
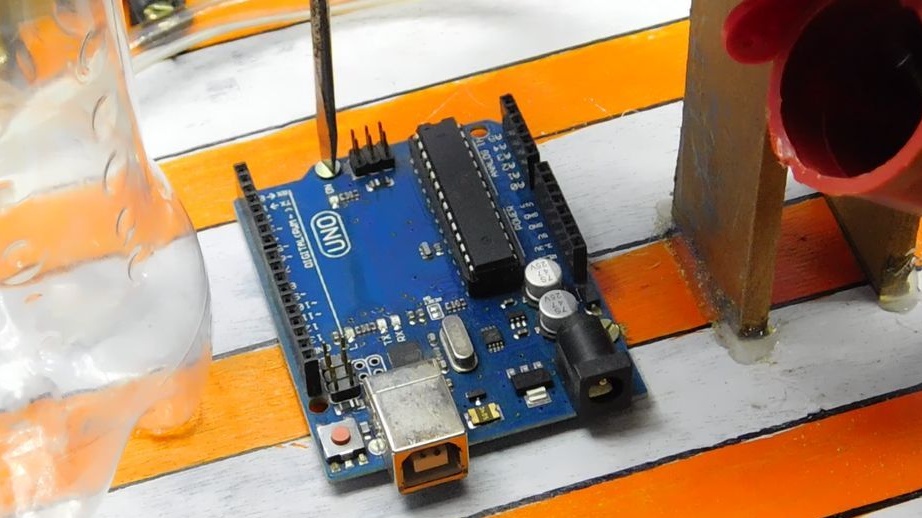
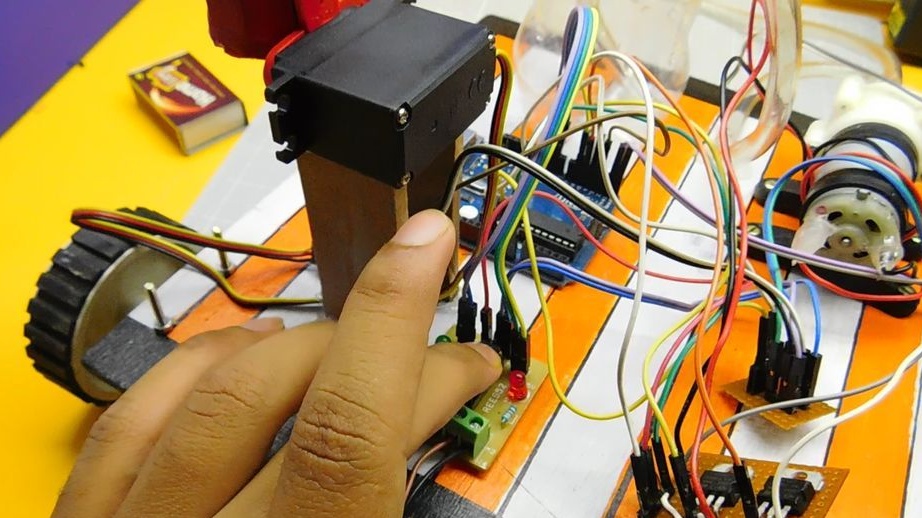
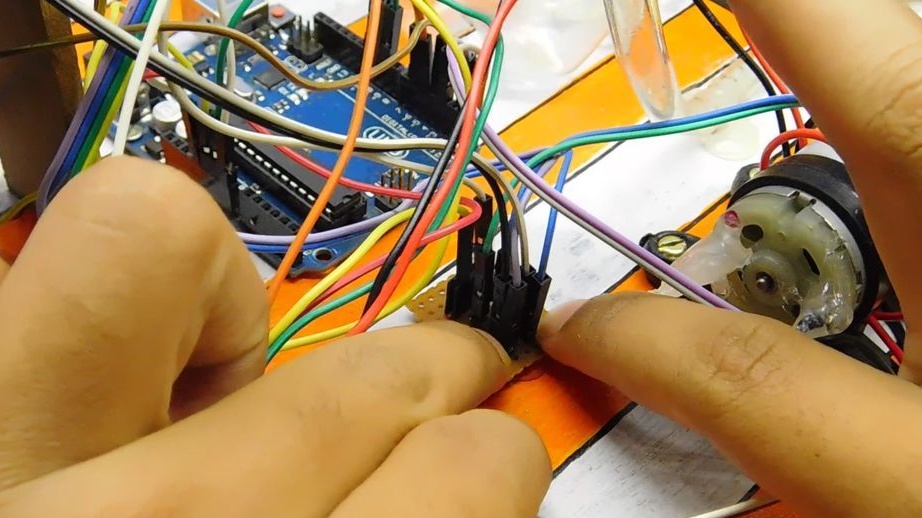
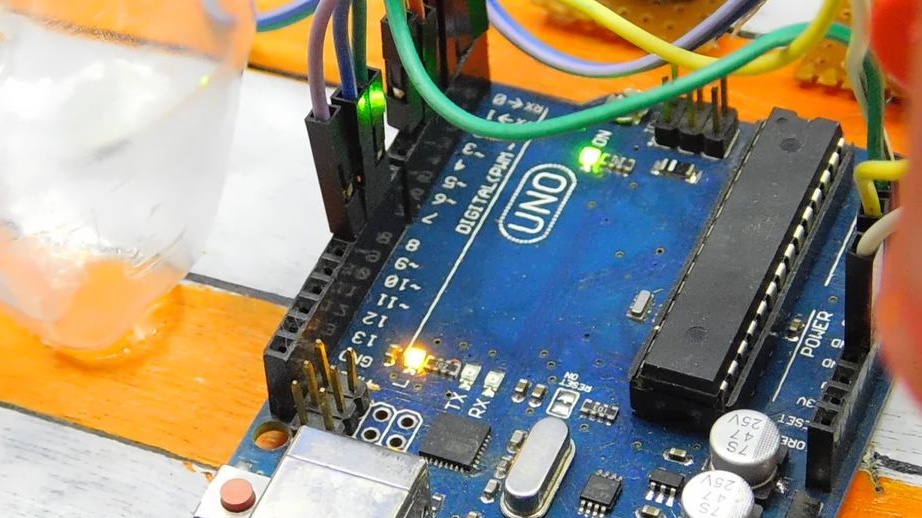
Langkah Lima: Memasang Litar Arduino
Selamat Arduino ke platform dan sambungkan peranti elektrik ke papan.
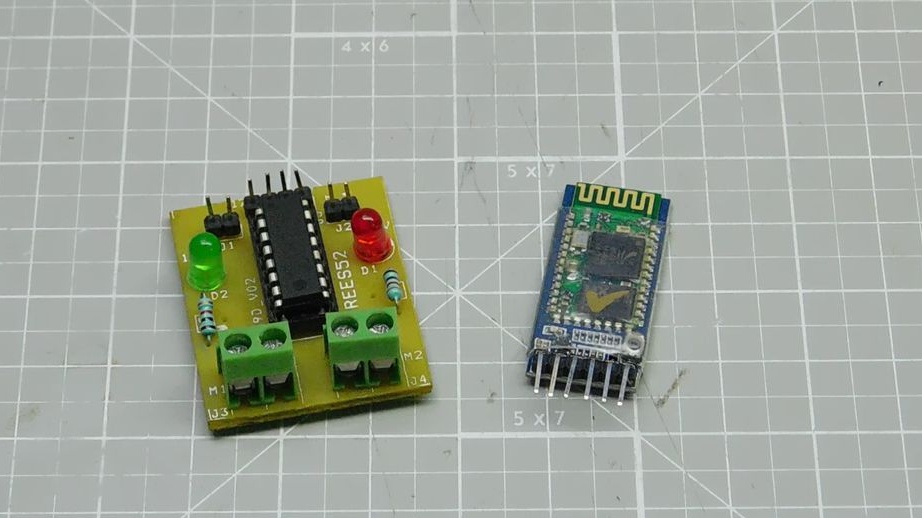
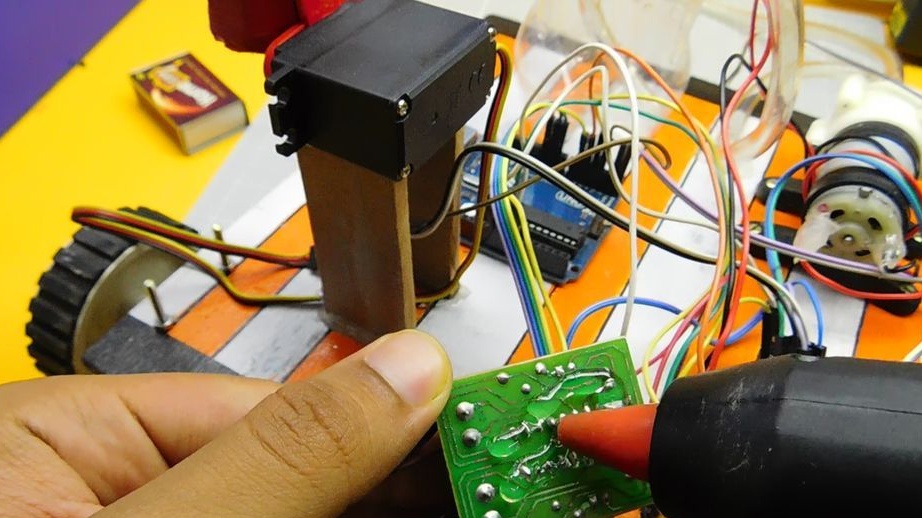
Modul kawalan enjin.
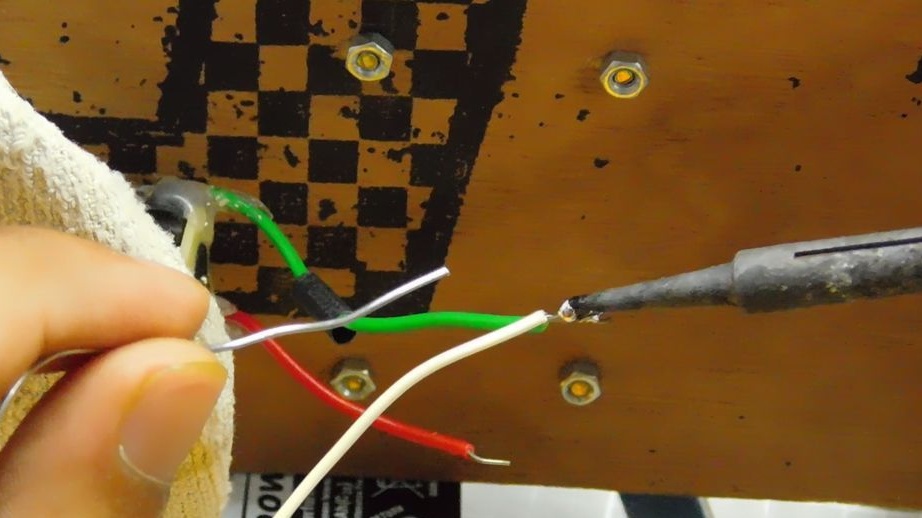
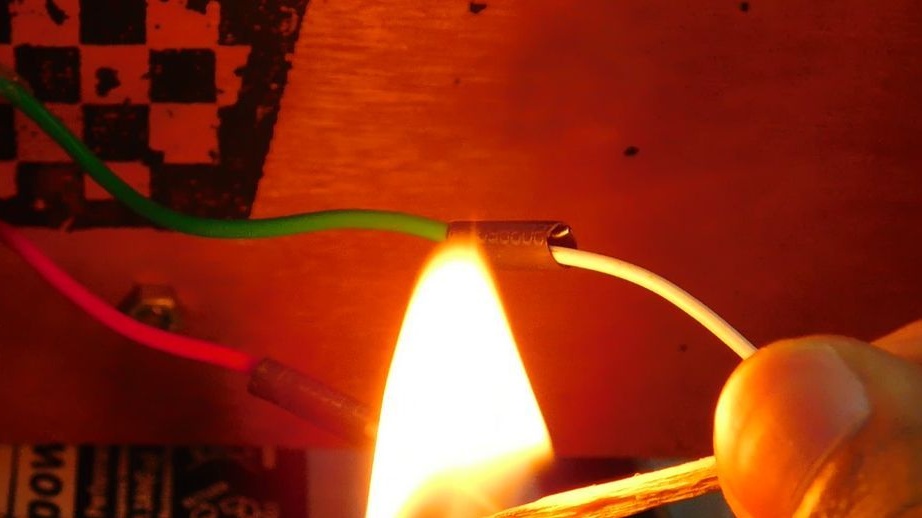
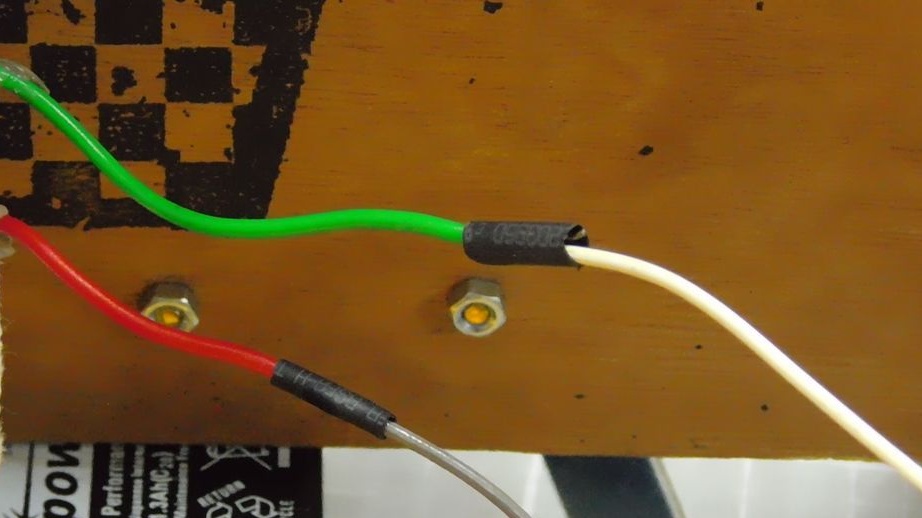
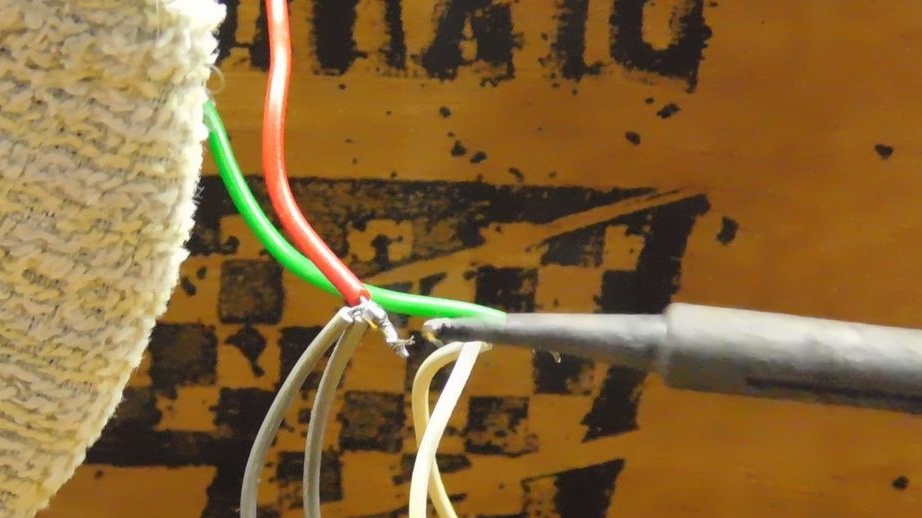
Ia menjualnya kepada motor (di mana roda dipasang untuk pergerakan, bukan berus) wayar. Mempadatkan wayar dalam soket pemasangan modul. Seterusnya, sambungkan modul ke Arduino seperti berikut.
Modul ::: Arduino
1 - D6
2 - D9
3 - D10
4 - D11
+ 5V - + 5V
Gnd-gnd
+ Modul 12V akan disambungkan ke bateri.
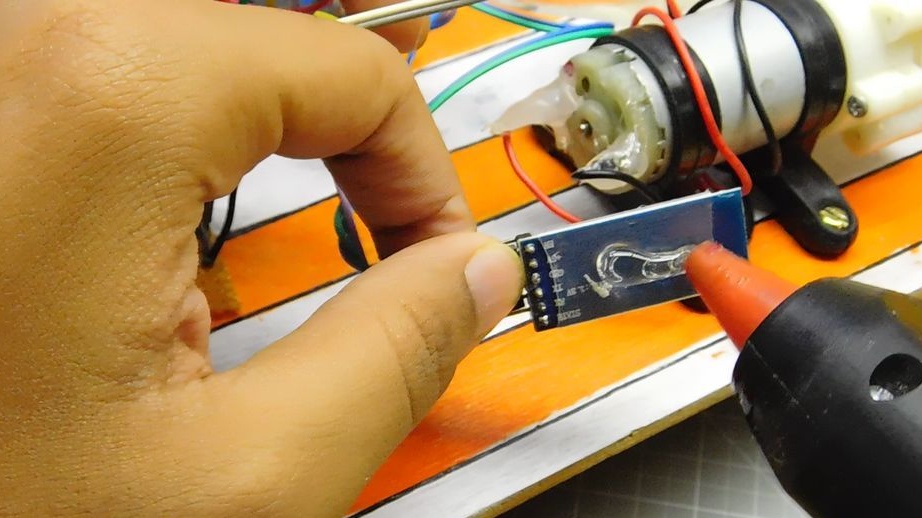
Sambungan Bluetooth.
Bluetooth ::: Arduino
Vcc - + 5V
Gnd - gnd
Rx - Tx
Tx - Rx
Servo motor ::: Arduino
Vcc - + 5V
Gnd - gnd
Isyarat - D3
Kemudian ia menghubungkan pam dan motor berus mengikut skema. Motor berus disambung secara selari dan berputar ke arah yang berbeza, betul mengikut arah jam dan kiri lawan arah.

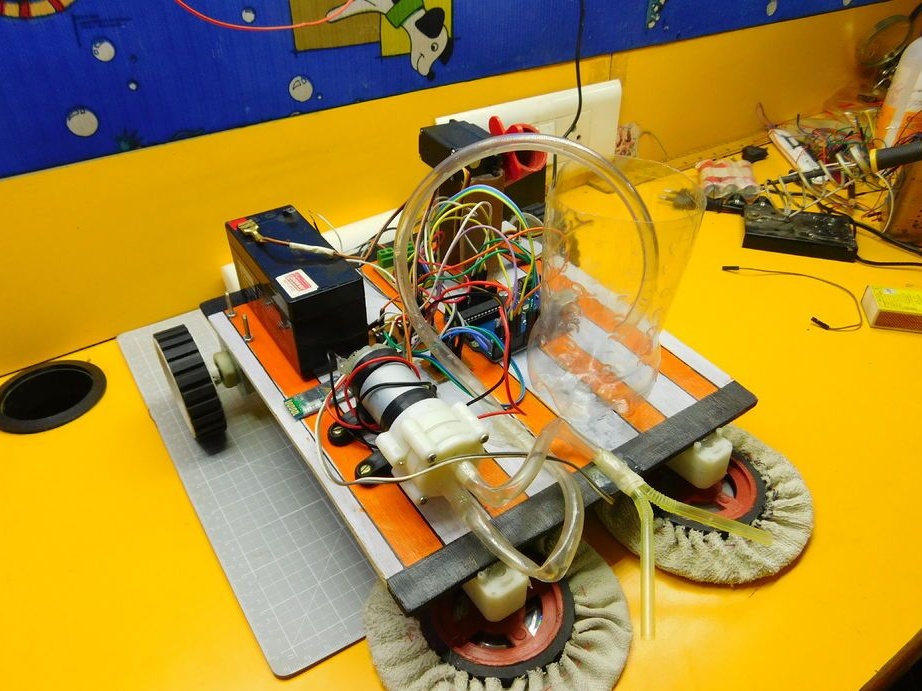
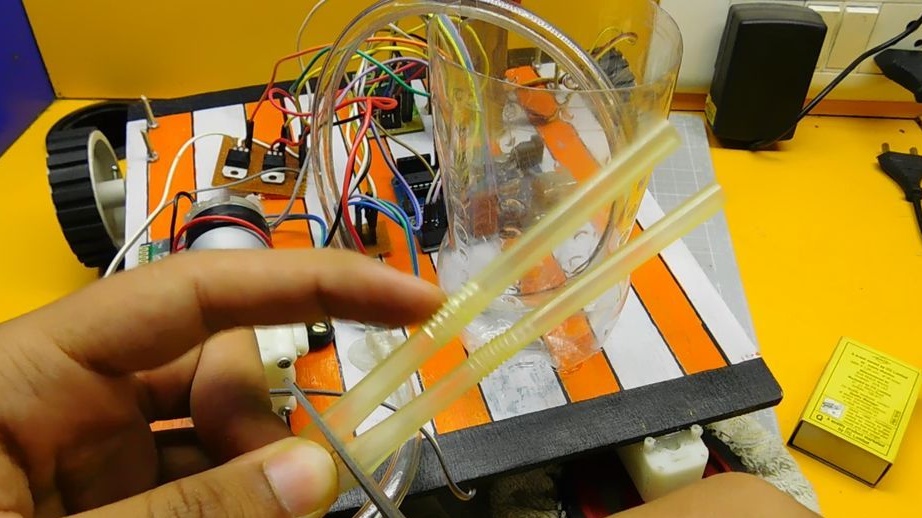
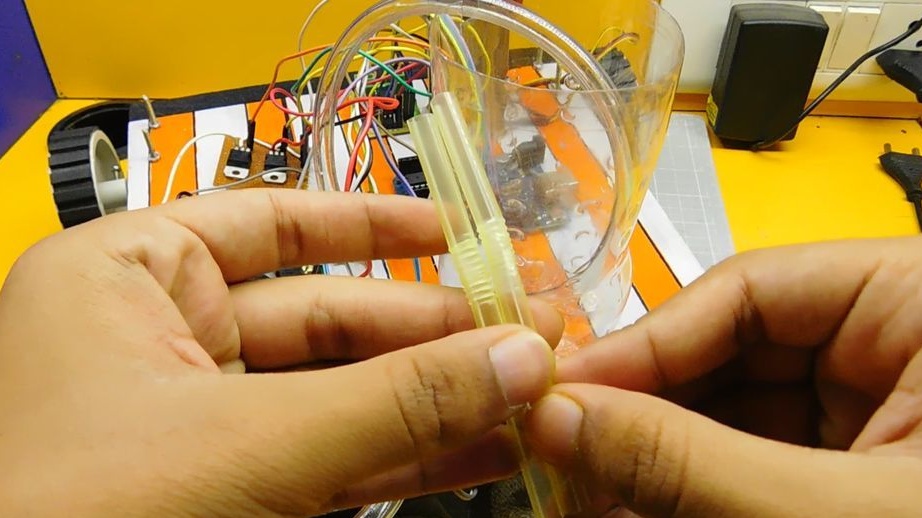
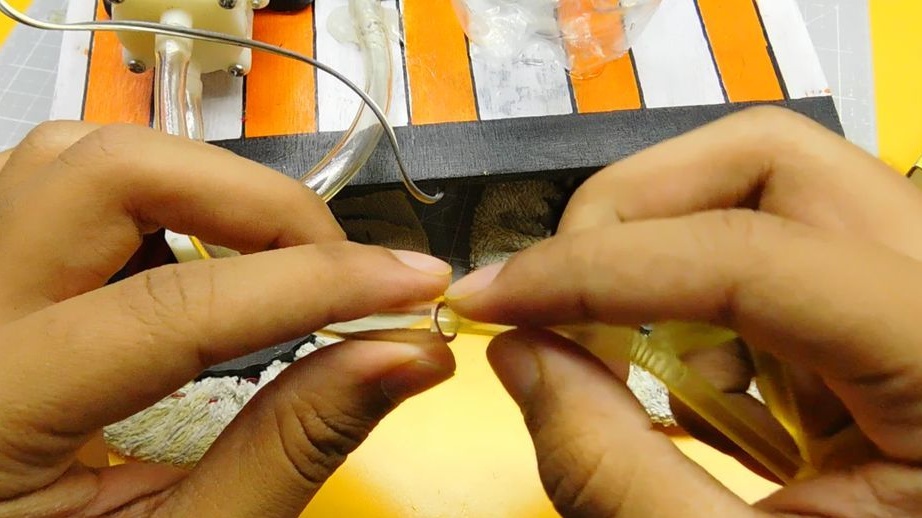
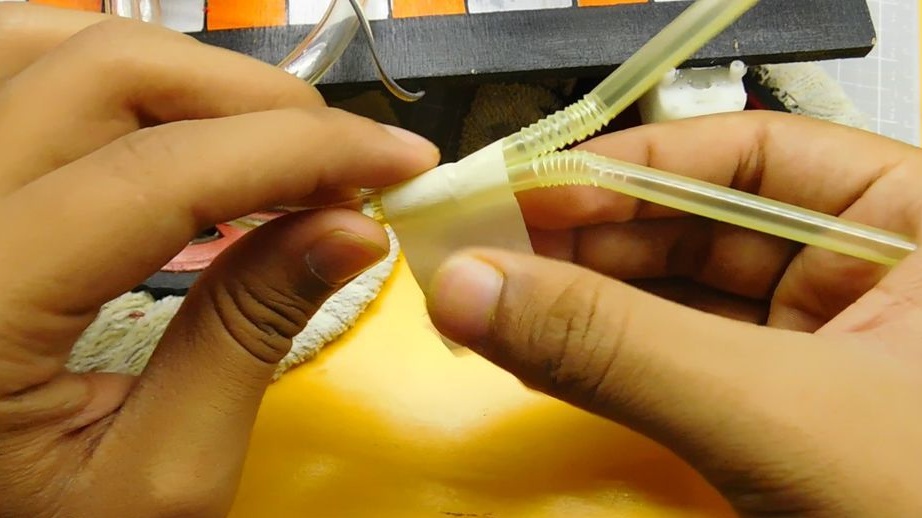
Langkah Enam: Pemasang Bahagian Robot
Potong dua strawberi koktel kira-kira 7 cm setiap satu. Masukkan jerami ke dalam paip bekalan air. Mempercepatkan jerami di hadapan berus.




Kunci pada platform elektronik komponen.

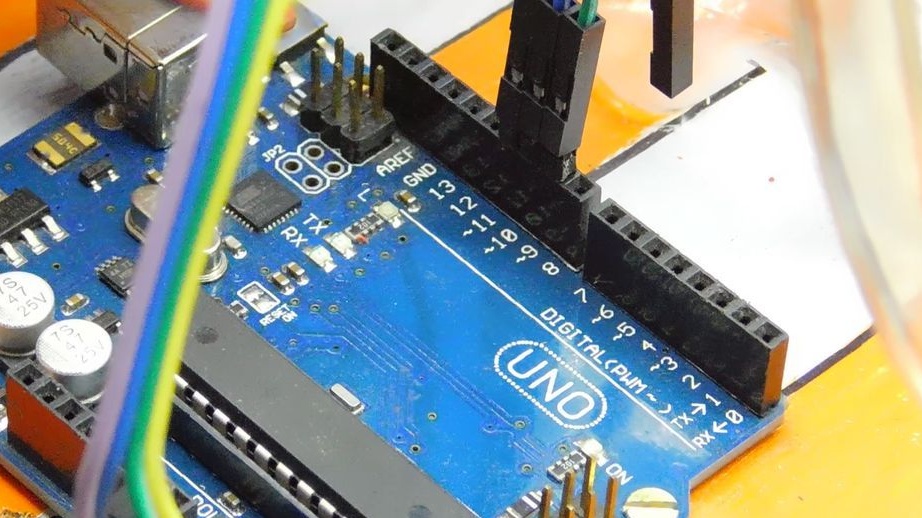
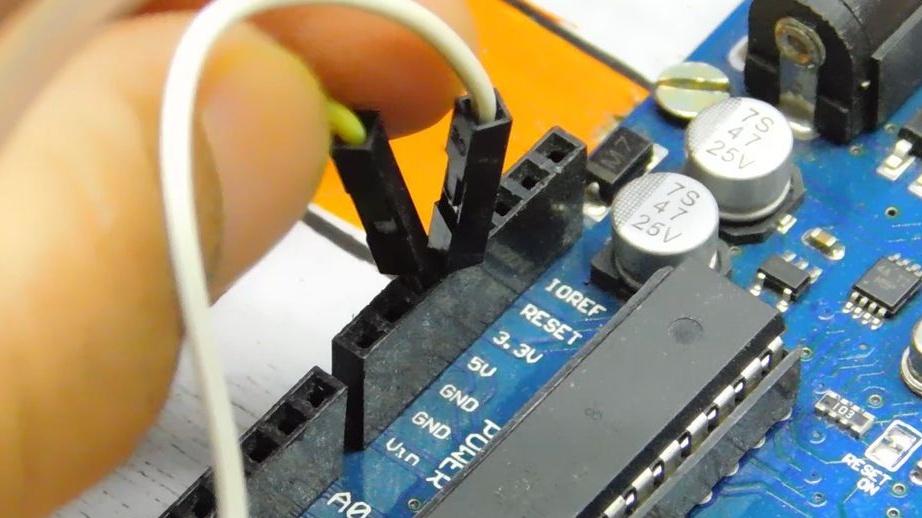
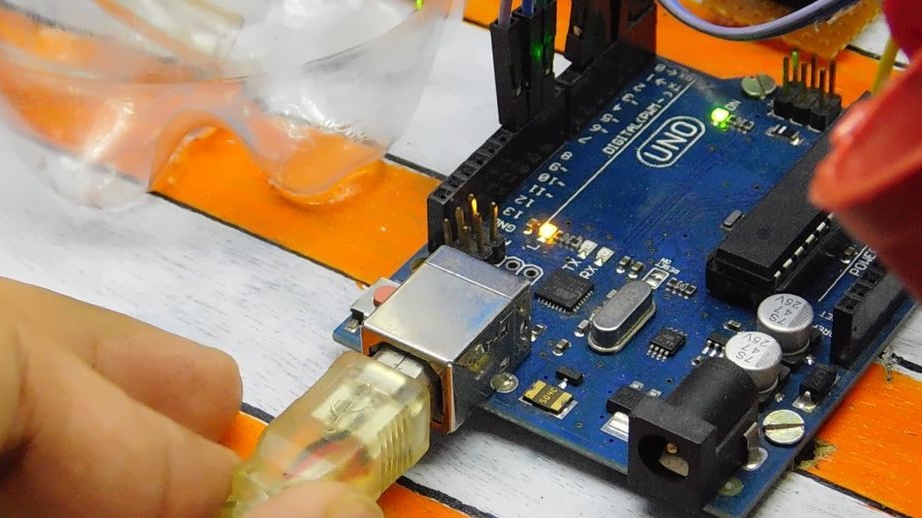
Langkah tujuh: muat turun kod
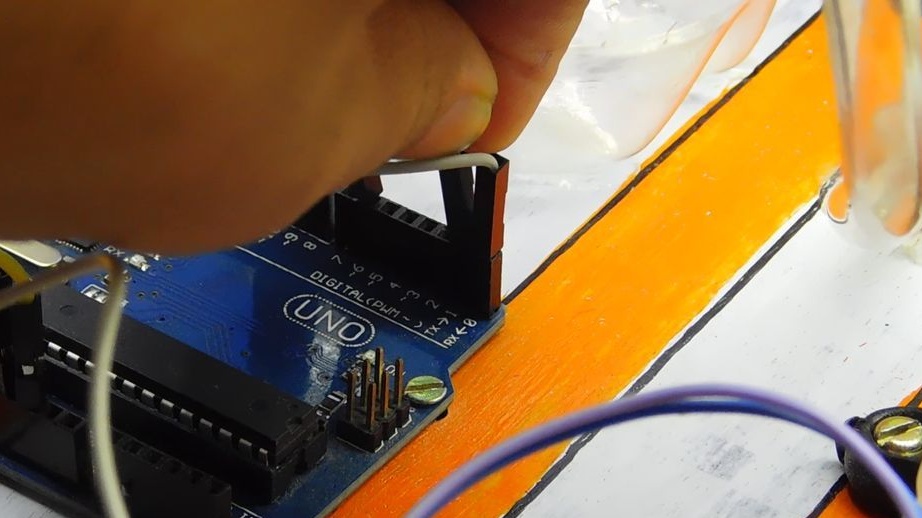
Menanggalkan pelompat Rx dan Tx dari papan Arduino. Sambungkan papan ke komputer. Memuatkan kod. Menetapkan penerjun di tempatnya. .
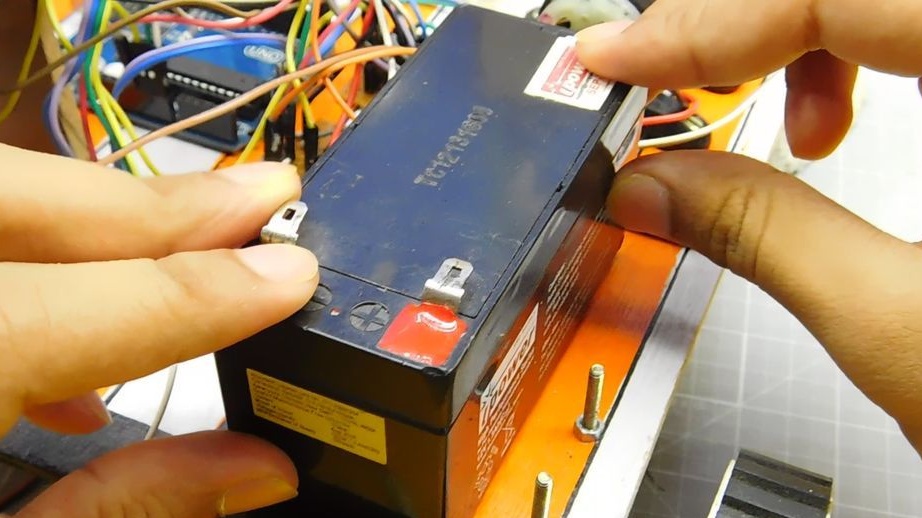
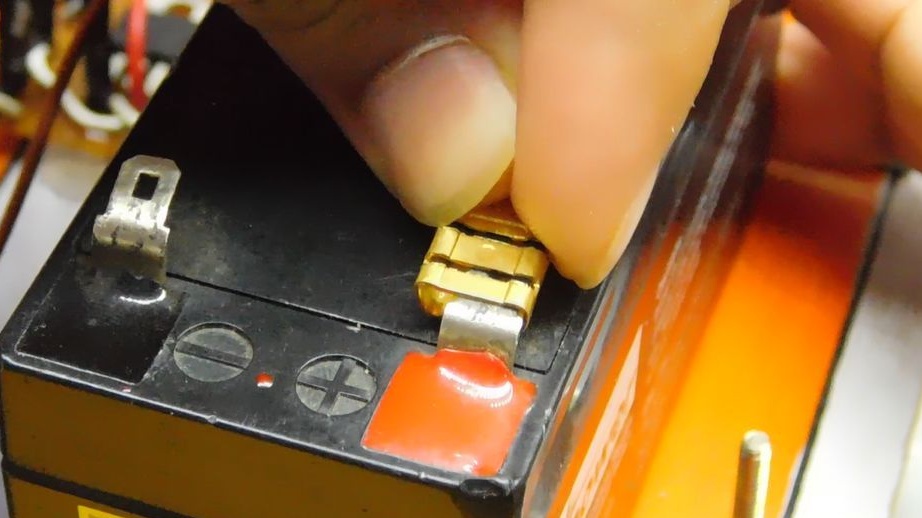
Langkah Lapan: Bateri
Mengamankan, menggunakan pita bermuka dua, bateri pada platform. Menyambung peranti elektronik ke bateri. Arduino menasihati untuk menyambung melalui pembahagi voltan. Anda juga boleh menambah suis ke litar.

Langkah sembilan: mengawal robot
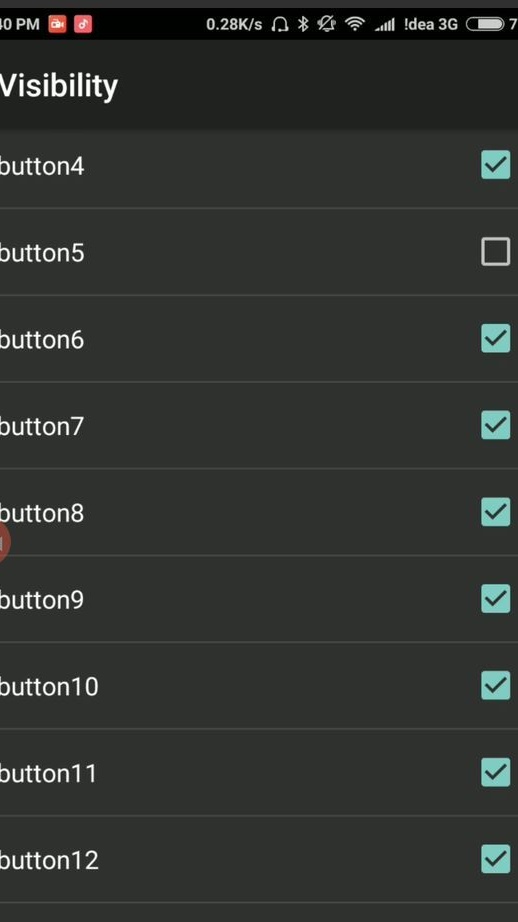
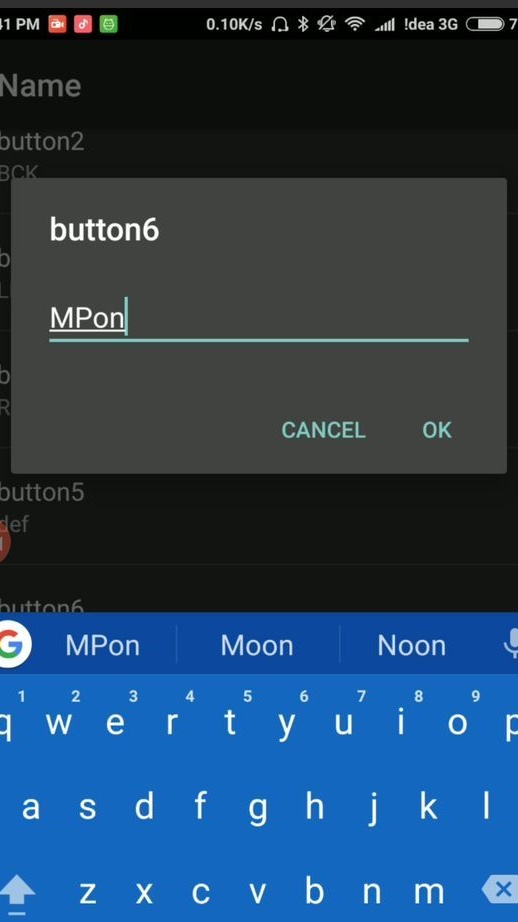
Dari Google Play, wizard memuat turun aplikasi 'Pengawal Serial Bluetooth'. Membuka permohonan. Pergi ke tetapan> keterlihatan. Melumpuhkan butang 5, 9, 12. Pergi ke nama. Berikan butang 2-3 huruf kepada setiap butang. Lihat gambar di bawah.
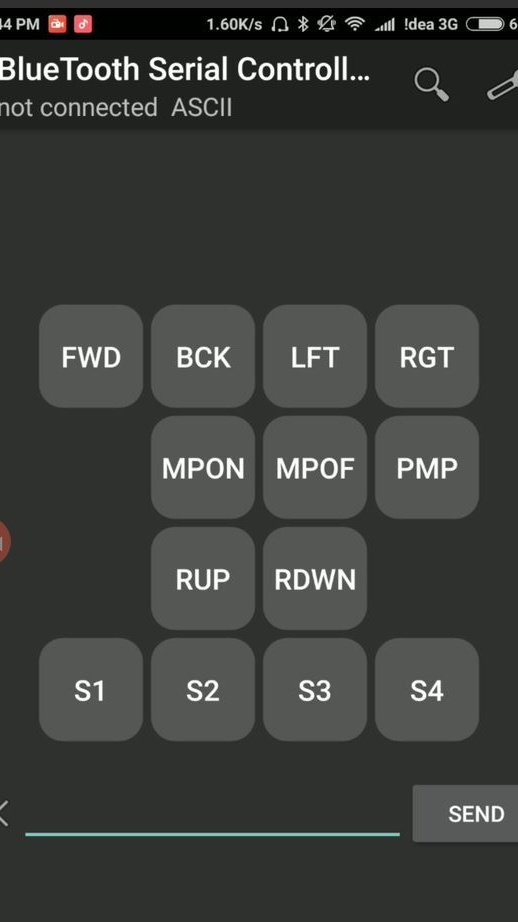
Kemudian setiap butang memasang arahan (petikan perlu dikeluarkan, tidak berubah):
Button 1 (FWD): 'F'
Button 2 (BCK): 'B'
Butang 3 (LFT): 'L'
Butang 4 (RGT): 'R'
Button 6 (MPON): 'M'
Butang 7 (MPOF): 'm'
Butang 8 (PMP): 'P'
Button 10 (RUP): 'U'
Butang 11 (RDWN): 'u'
Butang 13 (S1): '1'
Butang 14 (S2): '2'
Butang 15 (S3): '3'
Butang 16 (S4): '4'
Dalam perintah berhenti> arahan, serahkan arahan kepada butang ini sahaja:
Butang 1: 'S'
Butang 2: 'S'
Butang 3: 'S'
Butang 4: 'S'
Butang 8: 'p'

Kini ia kekal untuk menyambung ke modul bluetooth ("HC-05"), masukkan kata laluan (1234 atau 0000) dan anda boleh cuba membersihkan bilik -)))
Terima kasih kepada tuan induk, dan kami ingin dia memperbaiki robot itu dan mendapatkan kerja yang sepenuhnya dari segi autonomi.
Proses pemasangan keseluruhan pembersih robot dapat dilihat dalam video.