
Melihat melalui pengukir laser di aliexpress, tuan melepasi beberapa model berkuasa USB. Ia menghairankan bahawa mereka boleh mengukir pada bahan yang berbeza, serta memotong bentuk dan corak dari pelekat dan kertas, dan melakukan semua kuasa ini dari USB 5V. Tetapi kelemahan pengukir ini adalah bahawa mereka mempunyai kawasan kerja kecil, dalam kebanyakan kes hanya 40 mm x 40 mm.
Kemudian tuan memutuskan untuk merancang dan mengeluarkan pengukir secara bebas menggunakan pencetak 3D untuk pembuatan. Sepanjang perjalanannya, dia membuat keputusan untuk membuat modular laser supaya laser mudah diganti dengan pen atau penanda. Fungsi sambungan Bluetooth juga telah ditambah.
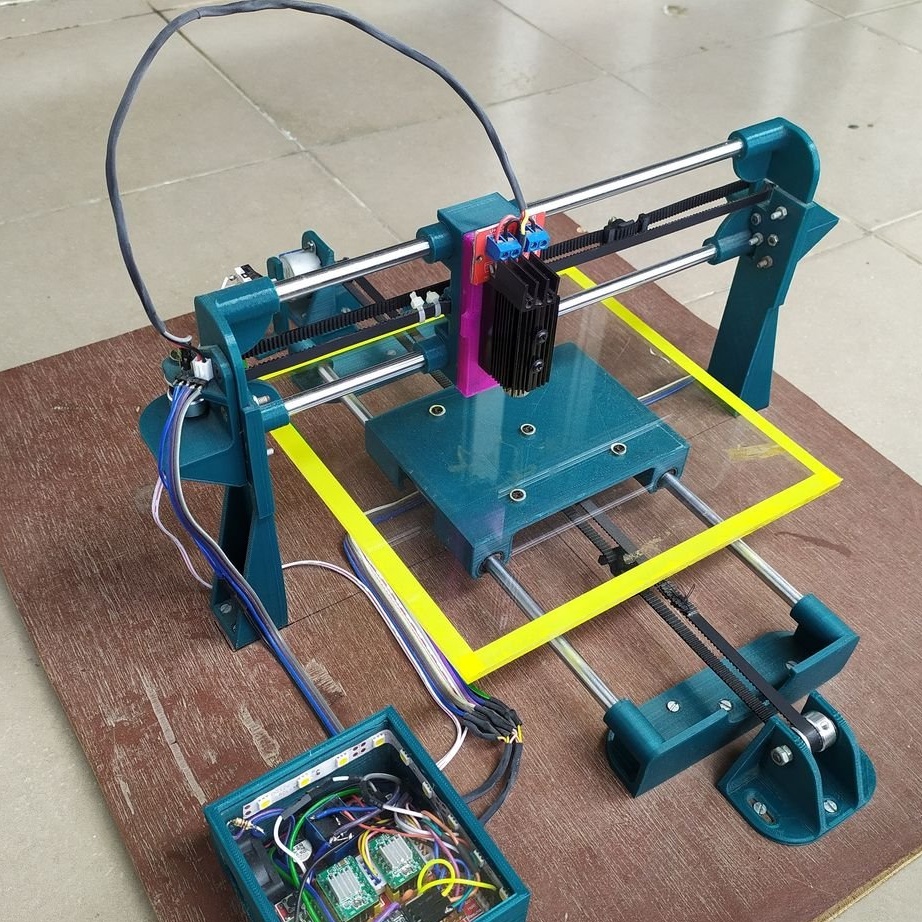
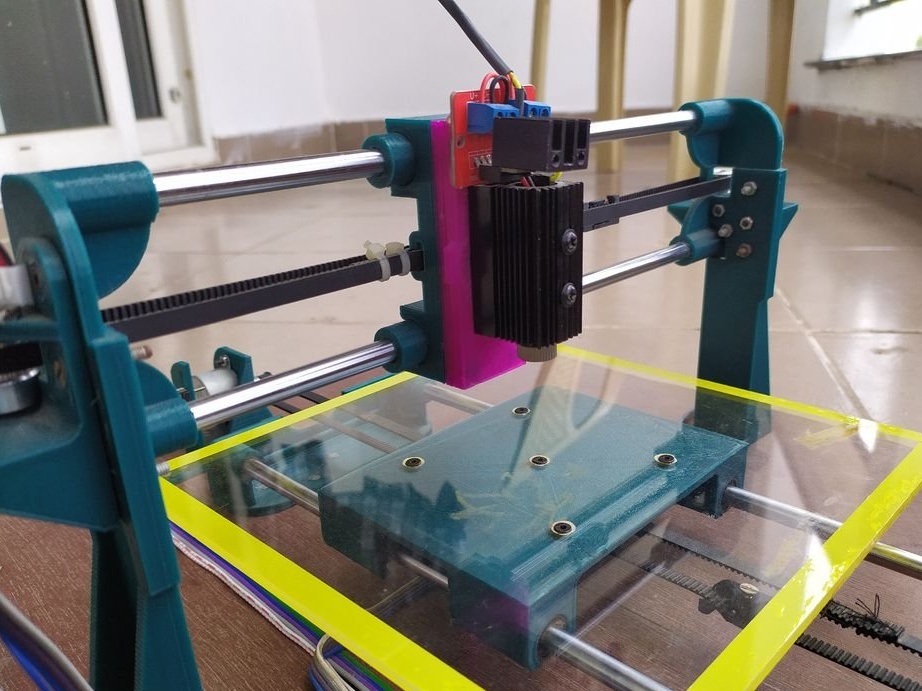
Spesifikasi teknikal pengukir adalah seperti berikut:
- Kawasan kerja 200 x 162 mm
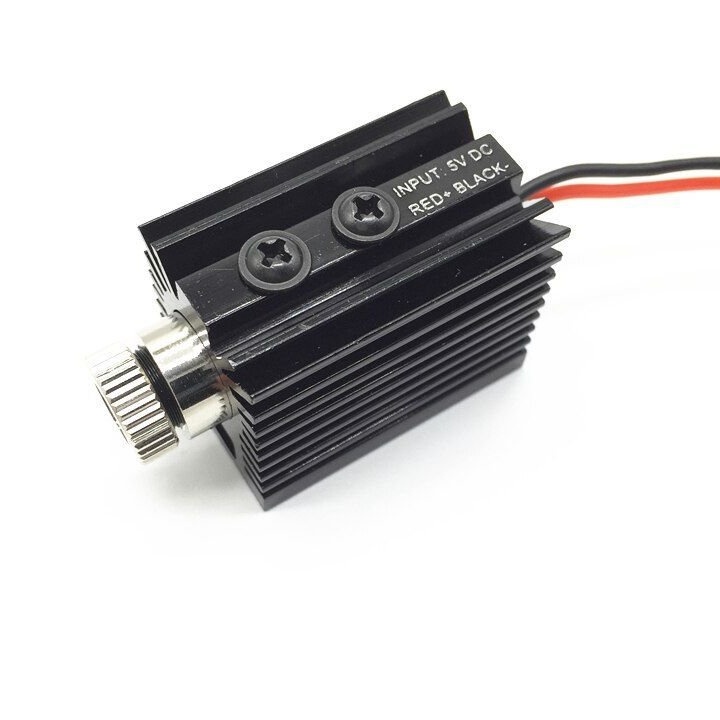
Modul -1000 mw laser
-Kerja dari sumber kuasa USB (5V)
-Panduan panduan auto
- Komunikasi Bluetooth antara pengukir laser dan PC
- Kawalan laser PWM. (Membantu dalam mencipta pelbagai warna hitam apabila potret ukiran)
-102.4 langkah-langkah setiap resolusi mm
- Mesin boleh mengukir, memotong dan menarik bahan-bahan yang berbeza

Alat dan bahan:
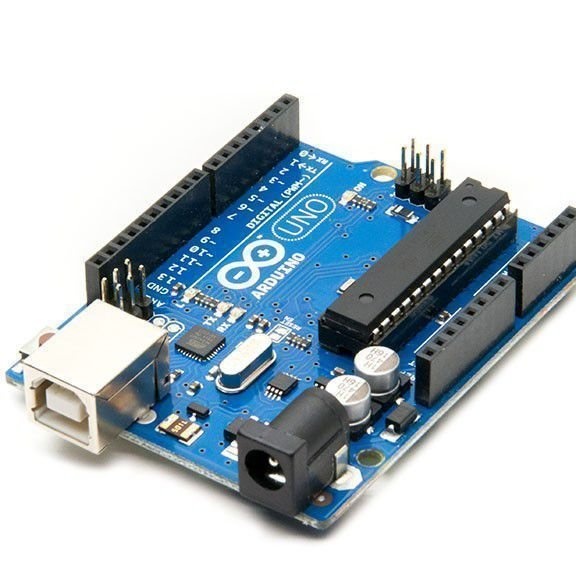
-Arduino UNO;
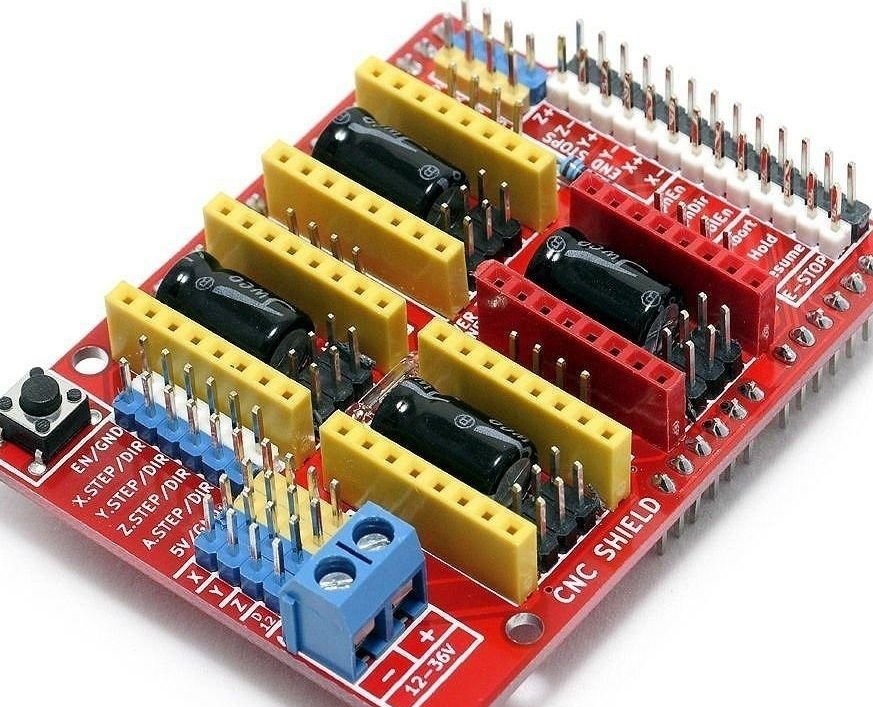
-Pembukaan papan;
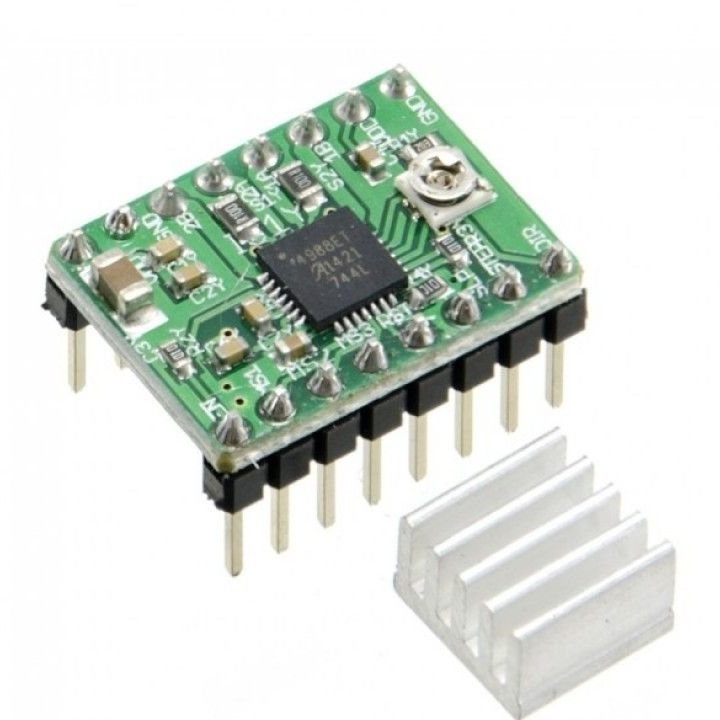
- Pemandu motor stepper A4988 - 2 pcs;
Modul laser -1000 mW;
- Arduino Nano;
- XL6009 Boost Converter;
- LM8UU galas bebola linear - 6 pcs;
Pulley - 4 pcs;
- Rod diameter 8 mm, panjang 300 mm -4 pcs;
-module IRF520 Mosfet;
- Relay;
- suis had - 2 buah;
-Menyata enjin 2 pcs;
- Magnet Neodymium 18 x 5 mm x 3 mm;
-30 * 30 mm kipas penyejukan 5 volt;
-Belt;
Modul Bluetooth -HC-05;
-SG90 servomotor;
Terminal skru
-Pelembung tiub;
- Superglue;
-Cable ikatan;
-Fasteners
M3 30mm
M3 12mm bolt
M4 40mm
Kacang M3
Kacang M4;
- Papan lapis 8mm 48 x 42 cm;
-5mm lembaran akrilik telus 22 x 22 cm;
- Kabel MicroUSB;
-Lap kertas;
-Nadfil;
- pemutar skru;
- Aksesori pematerian;
- Tang;
- gunting;
-Nippers;
-Komputer dengan perisian;











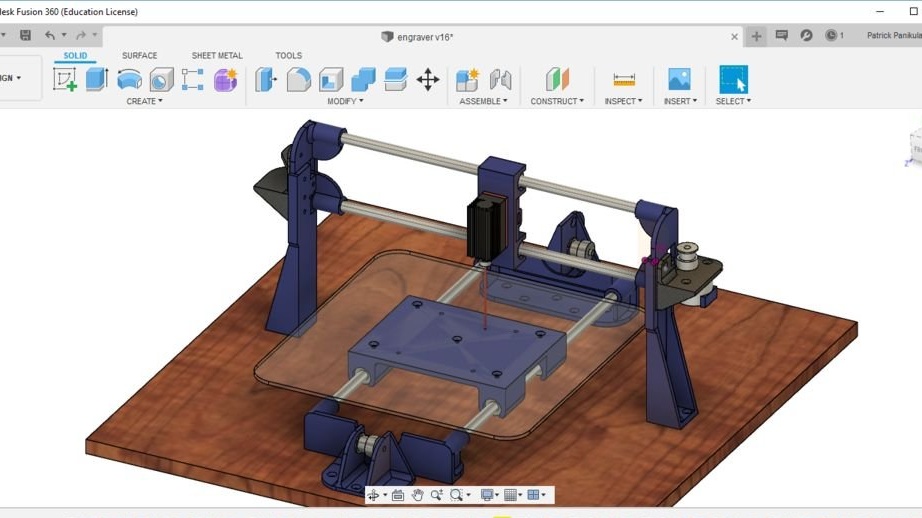
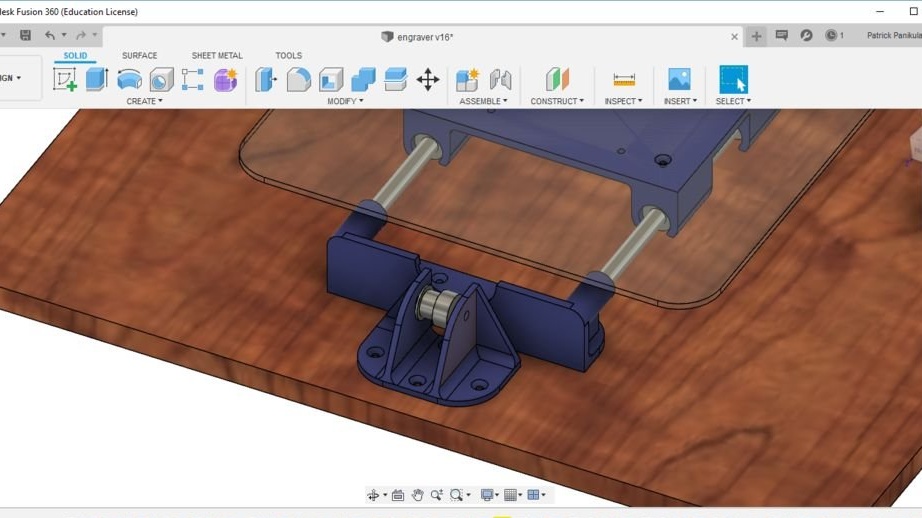
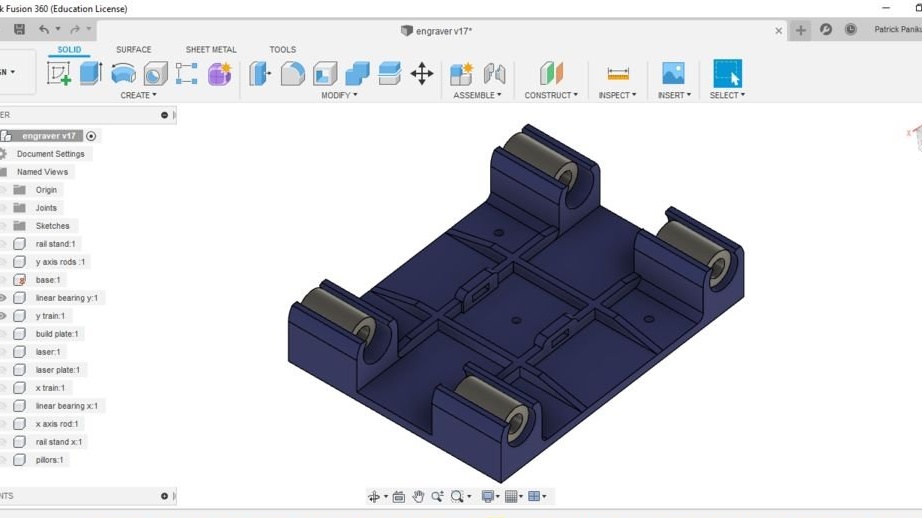
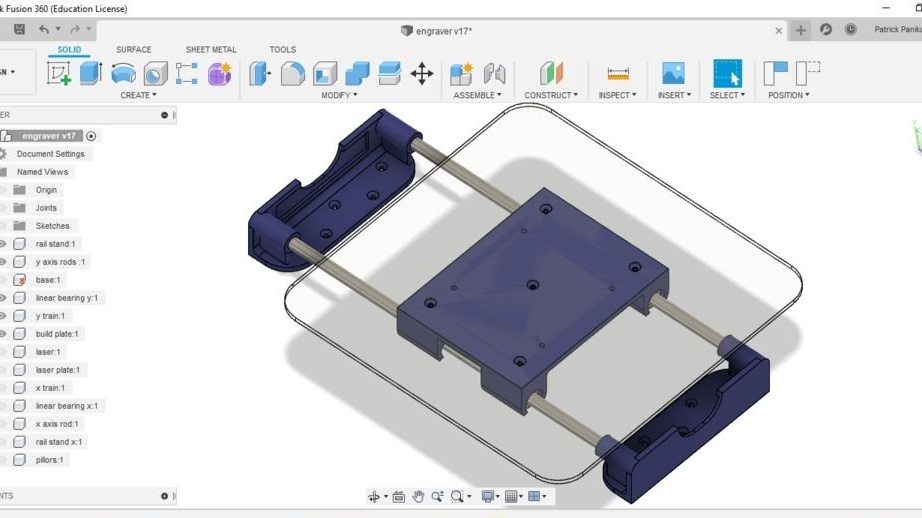
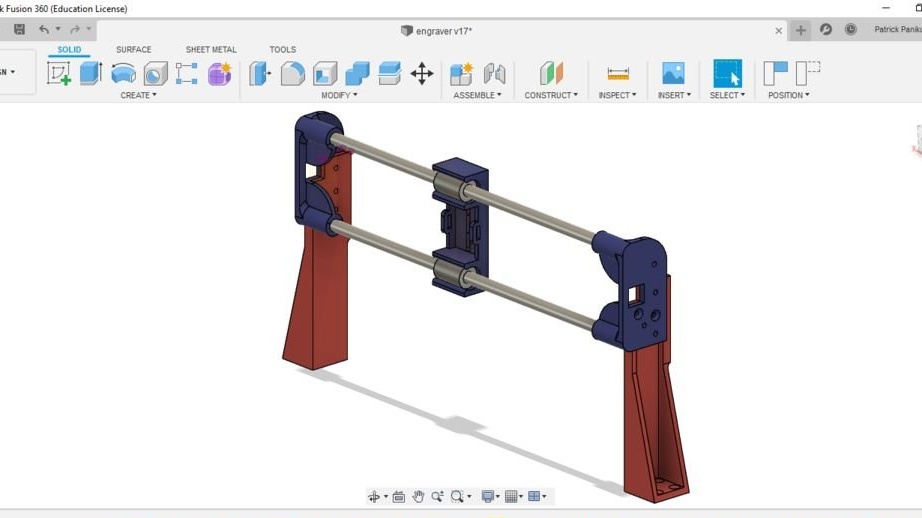
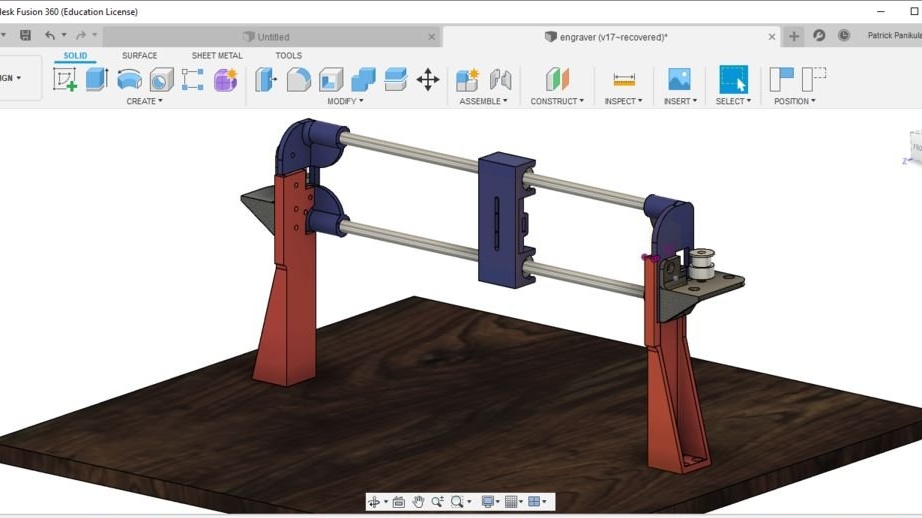
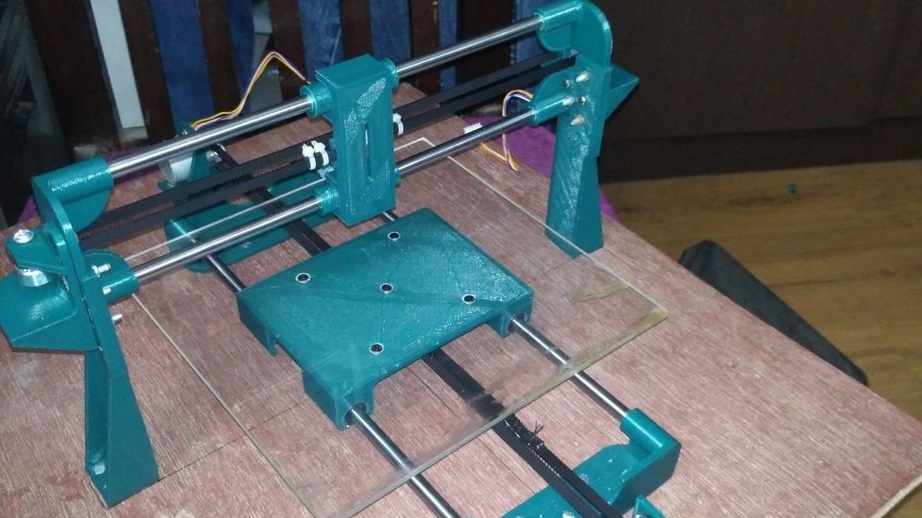
Langkah Pertama: Reka bentuk
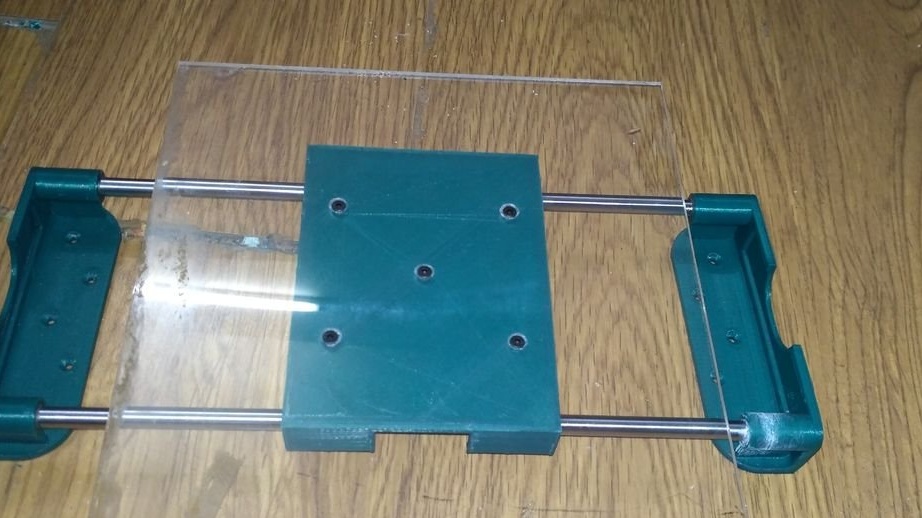
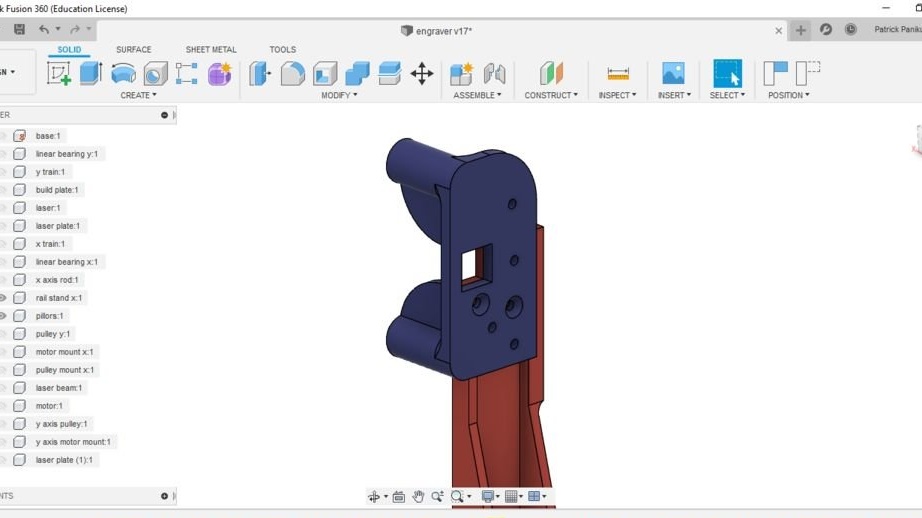
Penyihir bermula dengan merancang asas dan pemegang aci paksi-Y. Kerana pemegang terdiri daripada dua komponen yang sama, fungsi cermin dalam Fusion 360 menjadikan kerja lebih mudah. Fungsi cermin telah digunakan beberapa kali dalam perkembangan pemahat laser ini.Tidak seperti perisian CAD yang lain, salah satu ciri hebat Fusion 360 ialah ia membolehkan anda membuat pelbagai komponen pada satu skrin dengan pautan ke komponen lain, iaitu. model itu boleh direkabentuk.
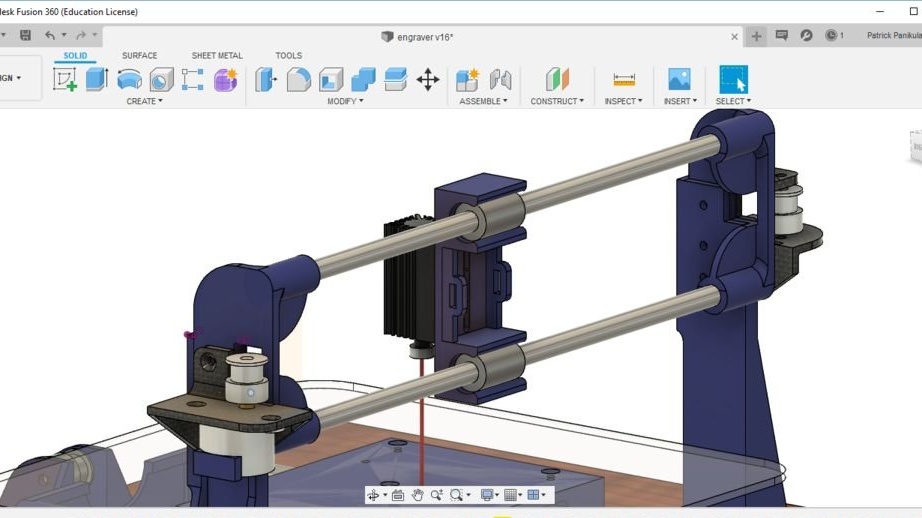
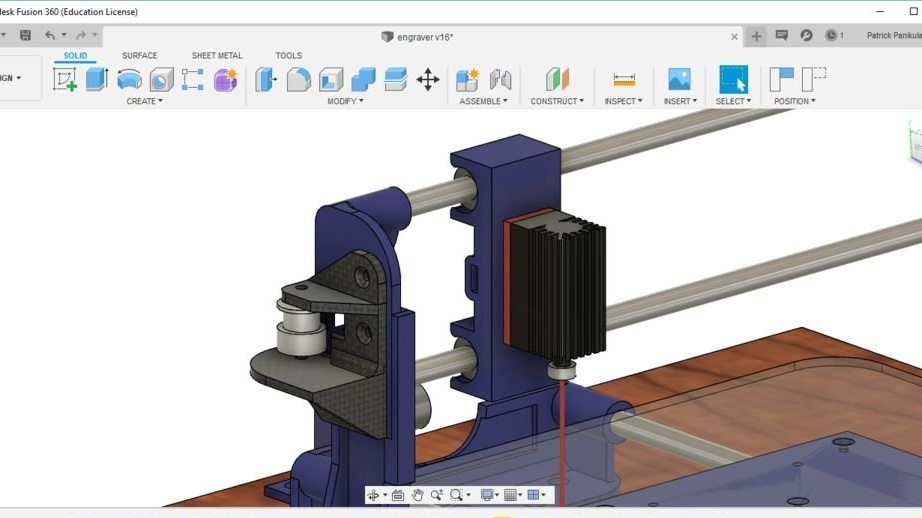
Ketinggian panduan paksi X bergantung kepada panjang fokus laser yang digunakan. Anda hanya perlu memastikan bahawa ketinggian laser berada dalam lingkungan ini. Pemfokusan akhir pancaran laser boleh dilakukan dengan menyesuaikan lensa pada laser.
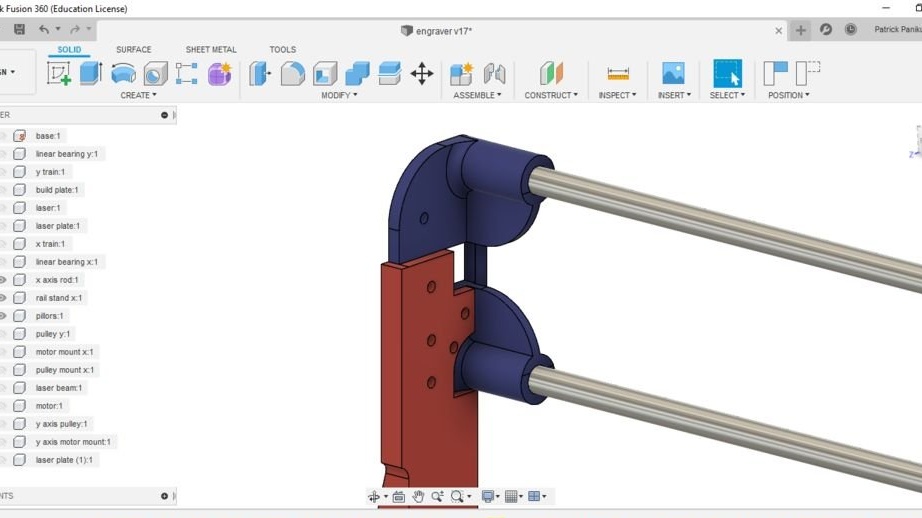
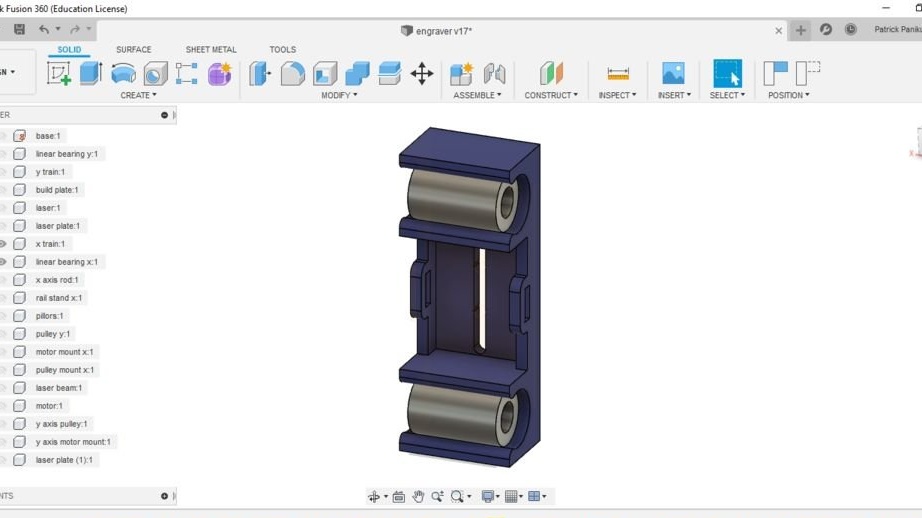
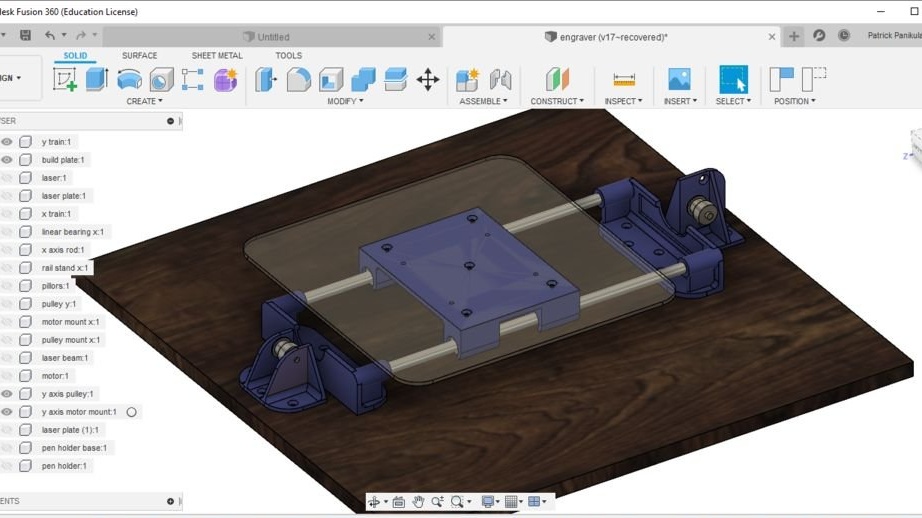
Fusion 360 juga membolehkan anda memilih rupa dan bahan komponen untuk membuat reka bentuk akhir kelihatan nyata. Program ini membolehkan anda menukar dan menyimpan komponen yang dibangunkan secara langsung dalam format STL untuk pencetakan 3D.
Di bawah ini anda boleh memuat turun fail Fusion 360 dengan projek pengukir.
pengukir laser v16.f3d
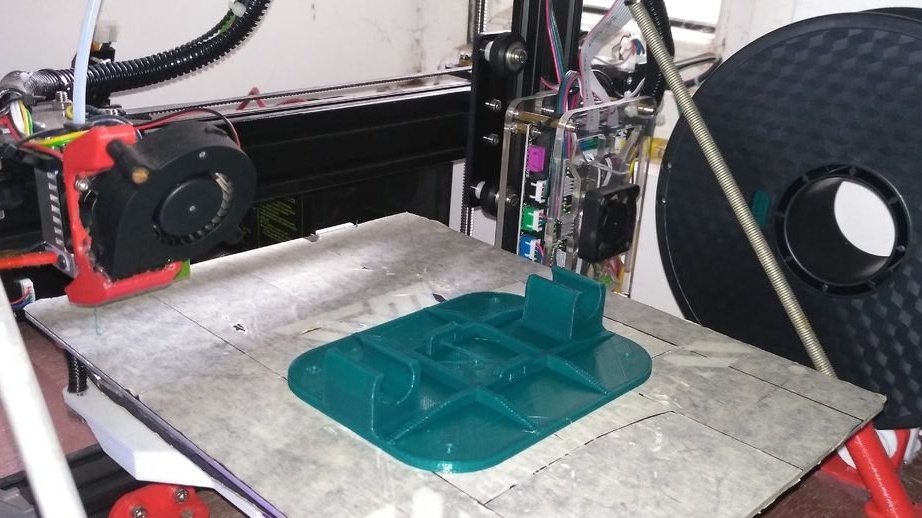
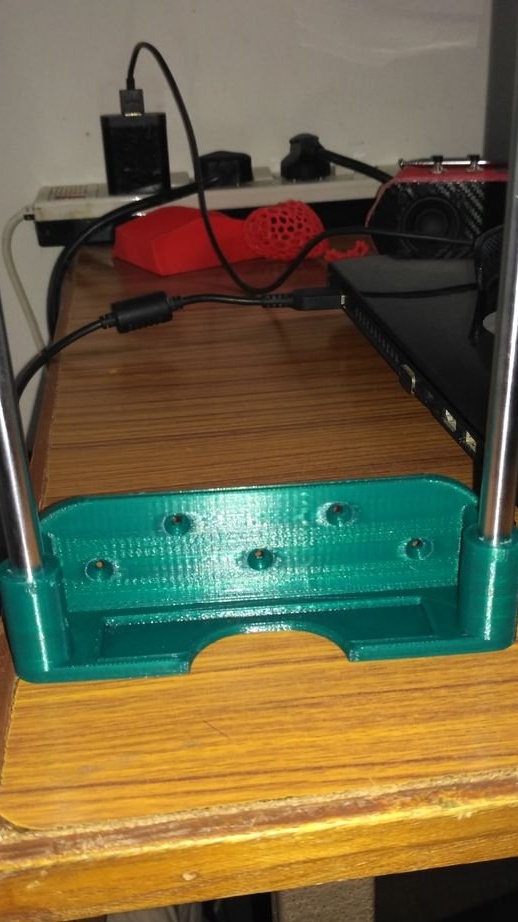
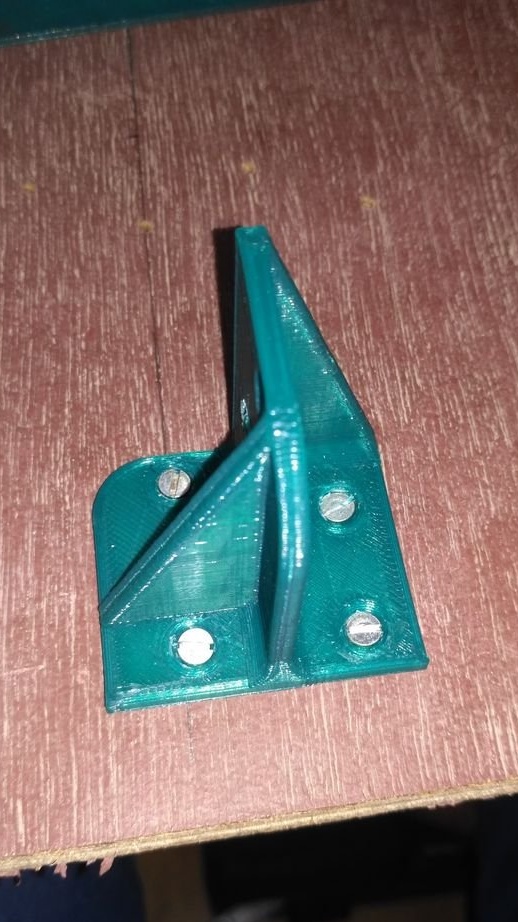
Langkah Dua: Percetakan 3D
Kemudian penyihir mula mencetak butiran. Semua bahagian direka sedemikian rupa sehingga mereka boleh dengan mudah dicetak dalam pencetak 3D tanpa sokongan.
Penyihir mencetak butiran pada pencetak 3D TEVO.
Bahan: PLA (Dark Green)
Ketinggian lapisan: 0.3mm
Pengisian: 30%
Ketebalan dinding: 0.8mm
Ketebalan Atas / Bawah: 0.9mm
Fail untuk mencetak boleh dimuat turun dengan mengklik pada ini pautan itu.

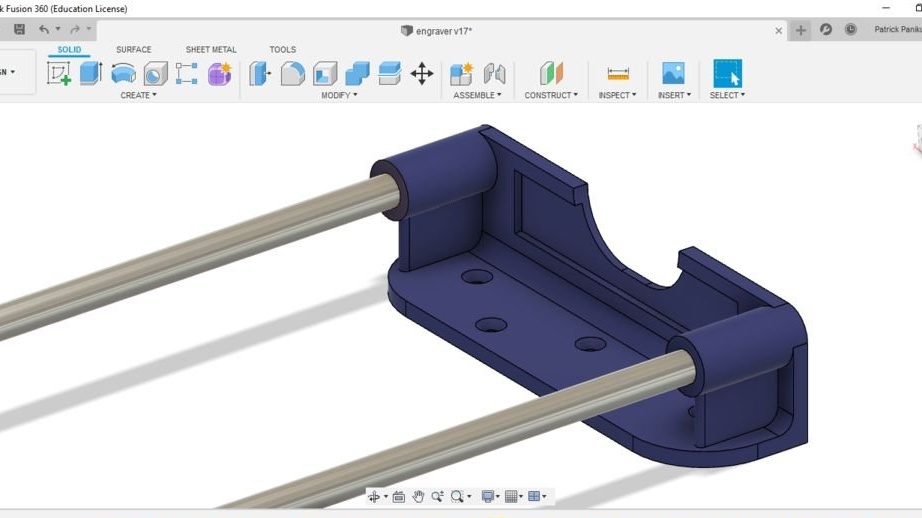
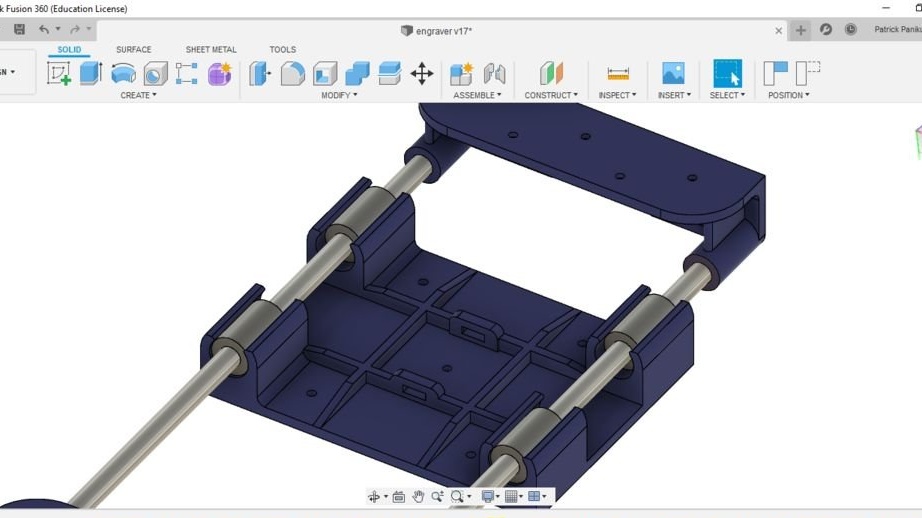
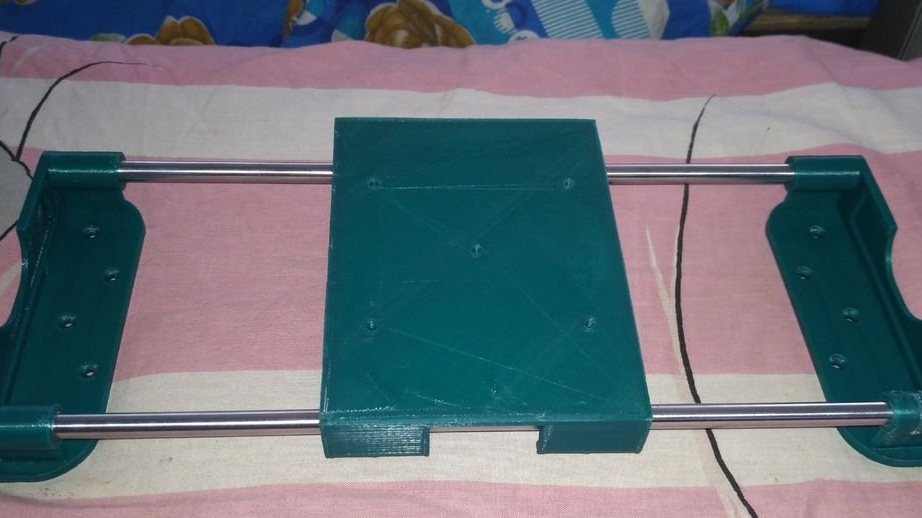
Langkah Tiga: Memasang Y Axis
Penyihir menasihatkan anda untuk membuka fail pembentukan Fusion 360 PC sebelum memasangnya. Ini membantu menjadikan proses membina lebih mudah difahami.
Penyihir memasang rod dan galas linier. Tuan yang direka untuk mengelakkan bahagian gluing, iaitu patut adalah ketat. Batang perlu diisi dengan kerusi dengan tukul.
Selepas pemasangan, pastikan pengangkutan bergerak dengan bebas.



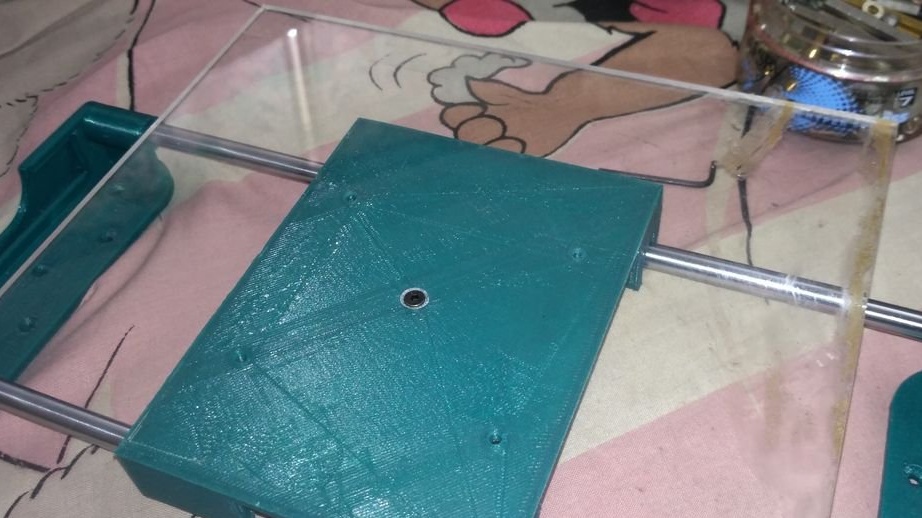
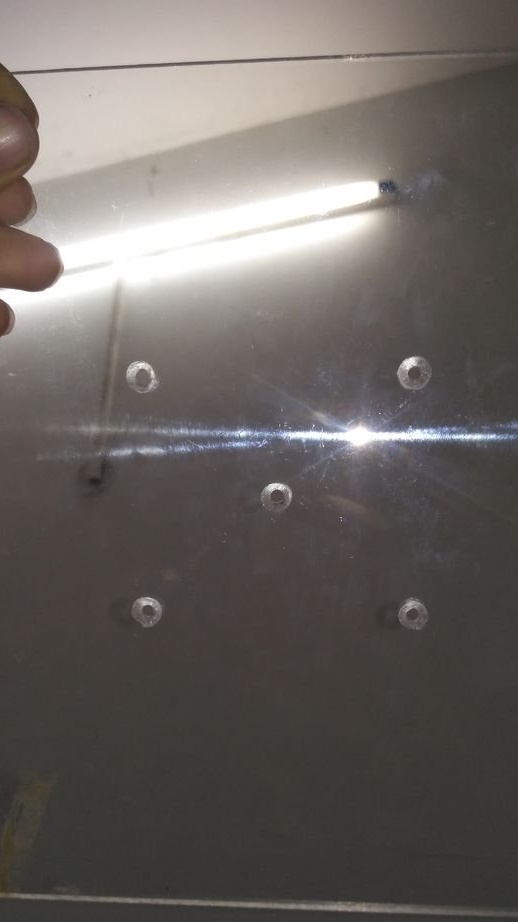
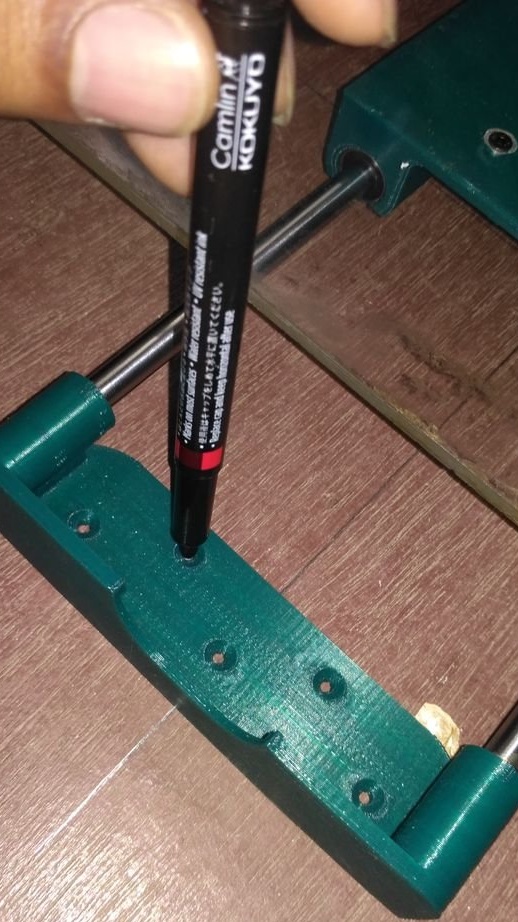
Langkah Empat: Desktop
Lubang dibor pada helaian akrilik. Skru lembaran ke kereta dan tetapkan tepi lembaran yang sama selari dengan tepi pengangkutan. Tandai dan gerakkan empat lubang pelekap. Skru akrilik ke pengangkutan.





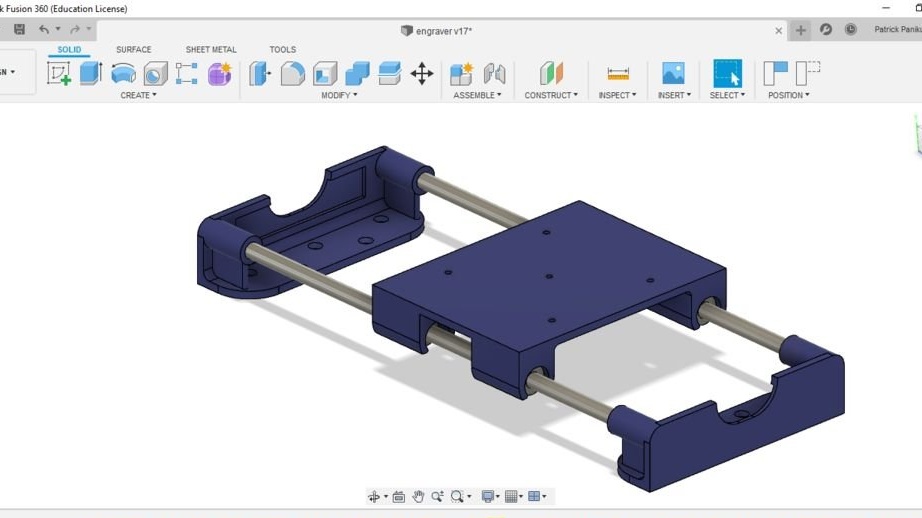
Langkah Lima: paksi X
Kemudian master mengumpul paksi X. Panduan untuk paksi dicetak oleh tuan, kerana yang dia beli ternyata cacat. Menurut beliau, selepas pengisaran dan pelinciran, panduan ini tidak lebih buruk daripada yang dibeli.





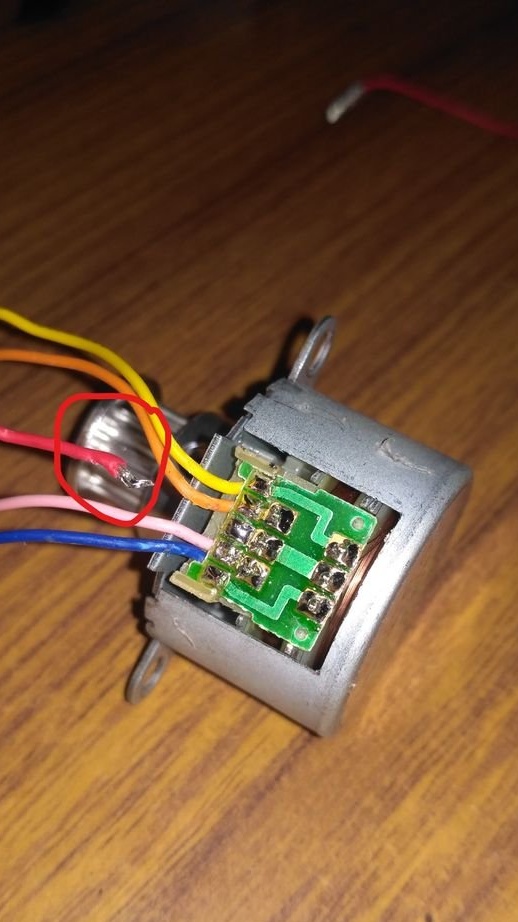
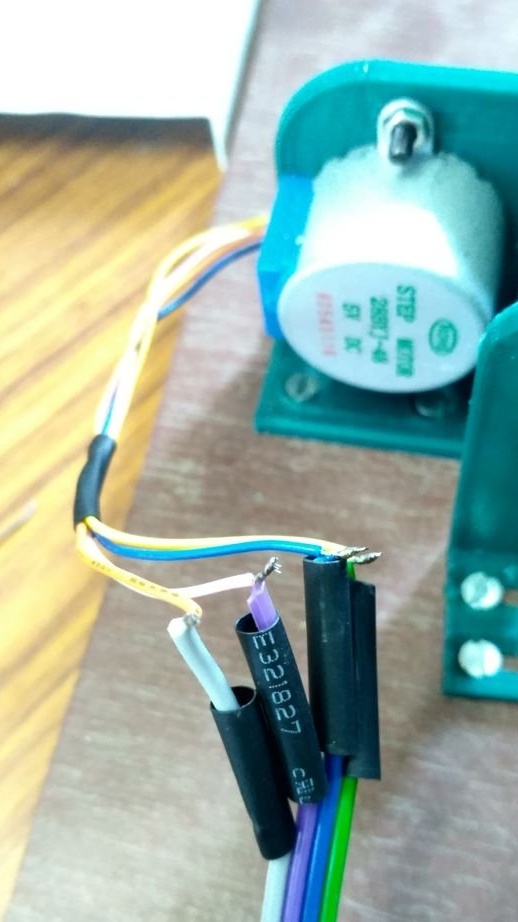
Langkah enam: mengerjakan semula enjin unipolar 28BYJ-48 menjadi bipolar
Terdapat dua sebab utama mengapa anda perlu menukar motor unipolar menjadi motor bipolar.
Algoritma kawalan motor bipolar menggunakan pemandu motor stepper A4988 lebih mudah daripada mengawal motor unipolar
Lembaga pengembangan hanya menyokong motor stepper bipolar.
Anda boleh membuat semula enjin dalam tiga langkah.
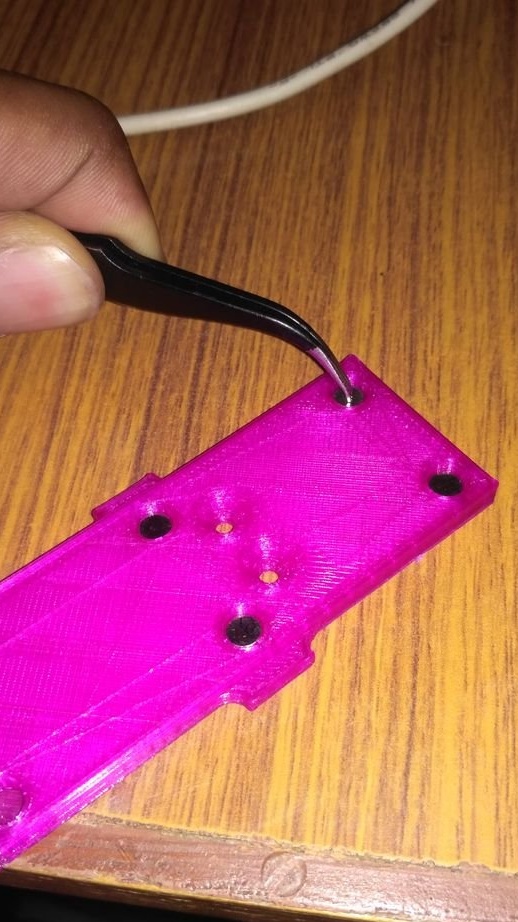
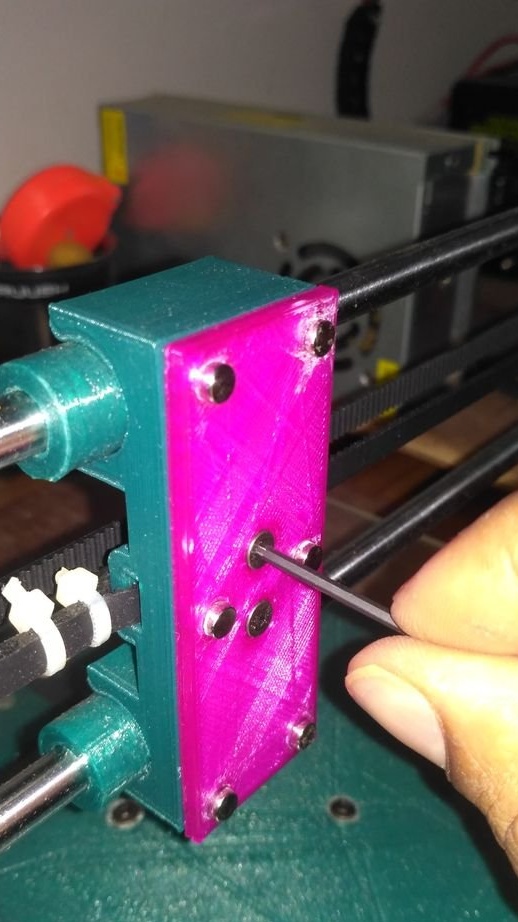
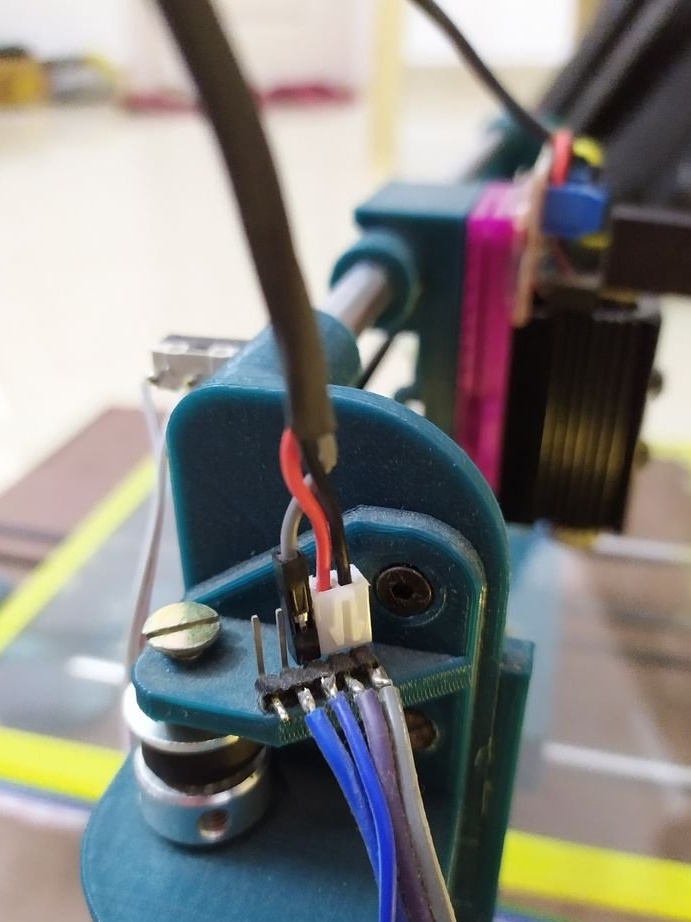
Buka kes plastik biru, cabut wayar merah dari papan, seperti yang ditunjukkan dalam foto pertama.
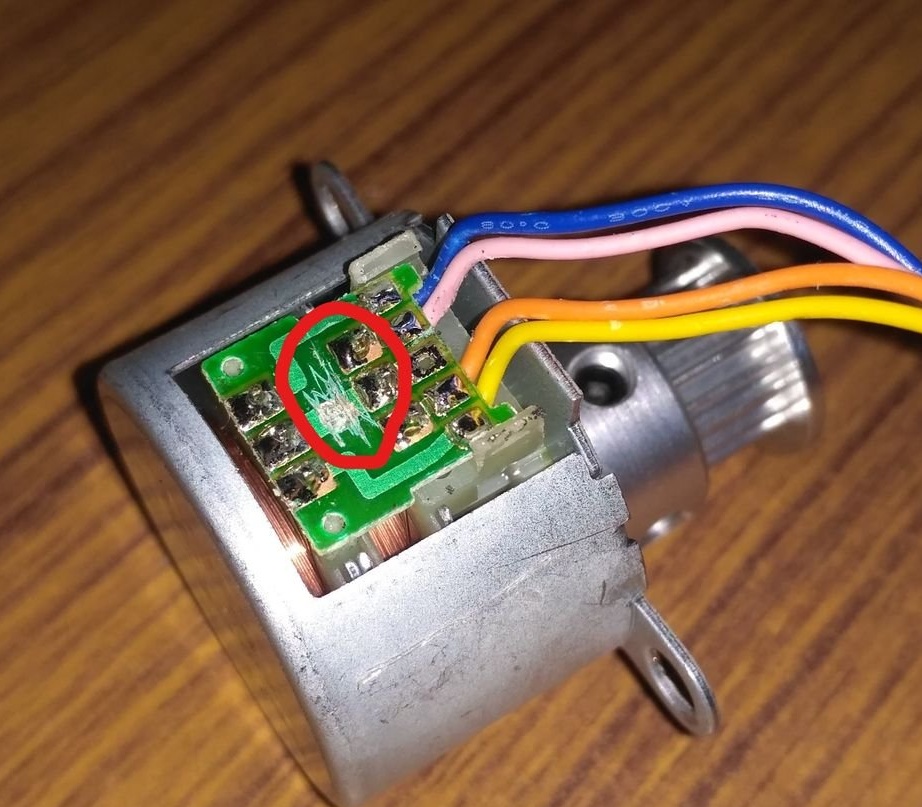
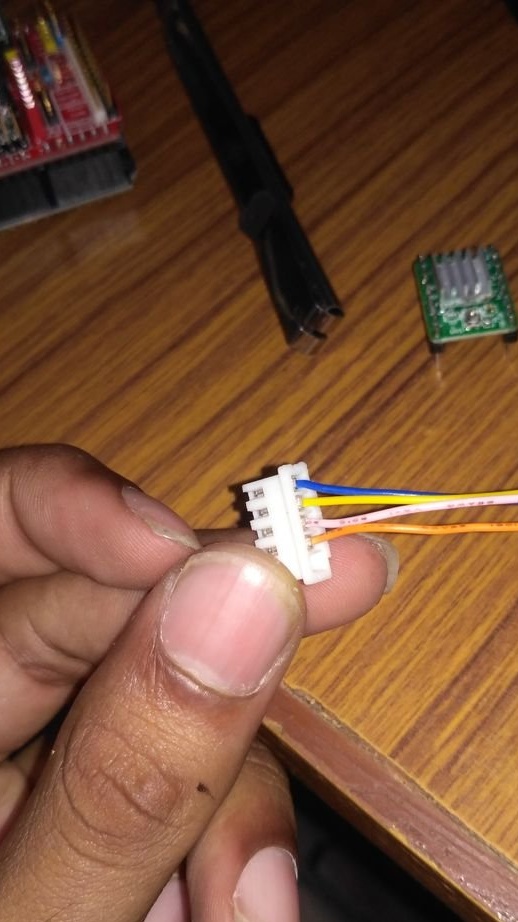
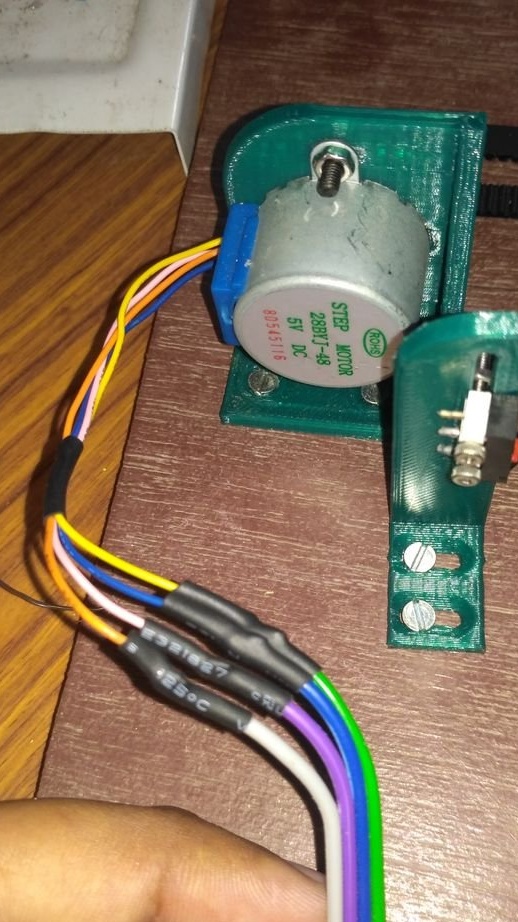
Kini anda perlu merosakkan trek, seperti dalam foto kedua dan menukar wayar di blok, seperti dalam foto ketiga.
Langkah ketujuh: memasang motor, koper, tali pinggang
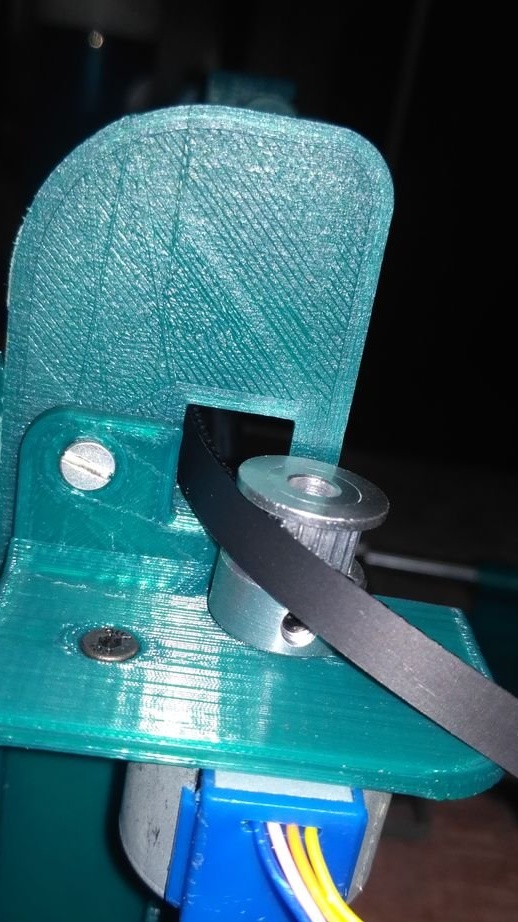
Memasang enjin. Di bahagian aci, enjin menjejaki pulley. Pulley kedua ditetapkan pada bahagian bertentangan enjin. Mempadatkan tali pinggang dengan ikatan. Melewati hujung kedua tali pinggang melalui kendi dan juga kencang.



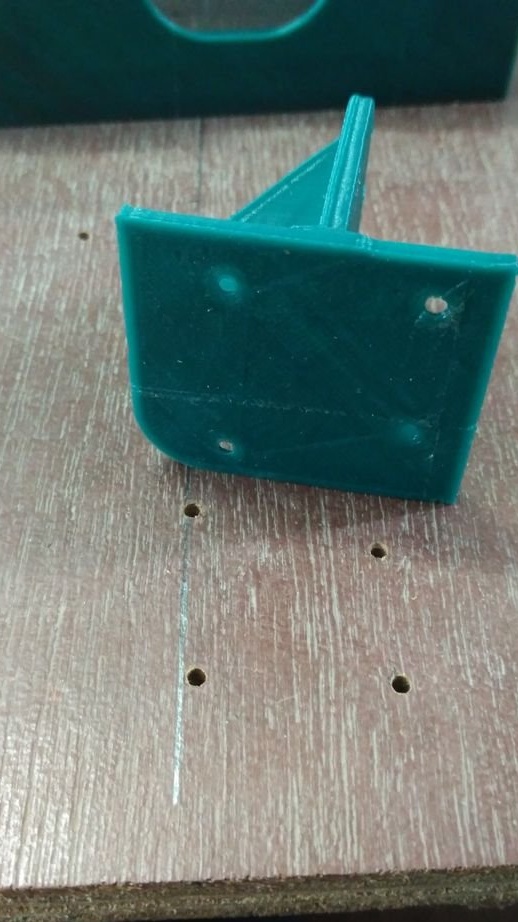
Langkah Lapan: Yayasan
Asas dibuat daripada papan lapis. Baginya, tuan melengkapkan paksi X.







Langkah Sembilan: Y axis
Kumpulkan paksi Y. Ini adalah langkah yang sukar.
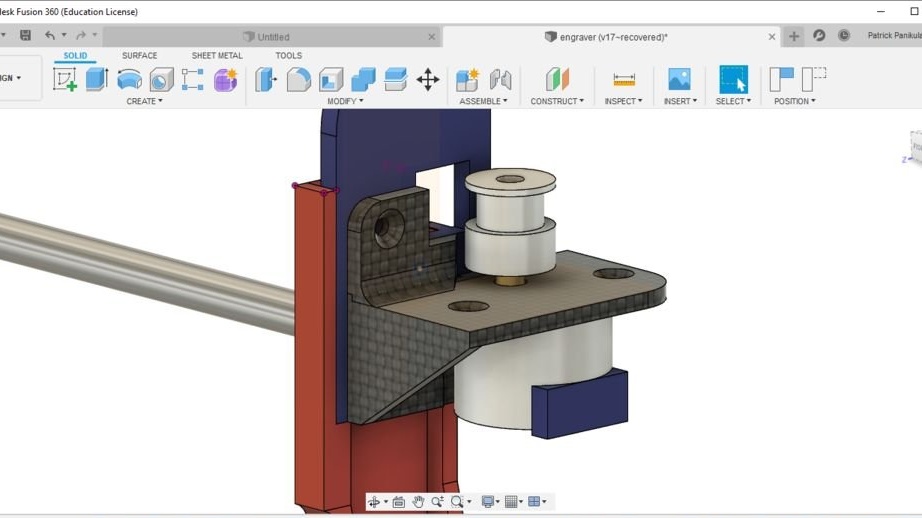
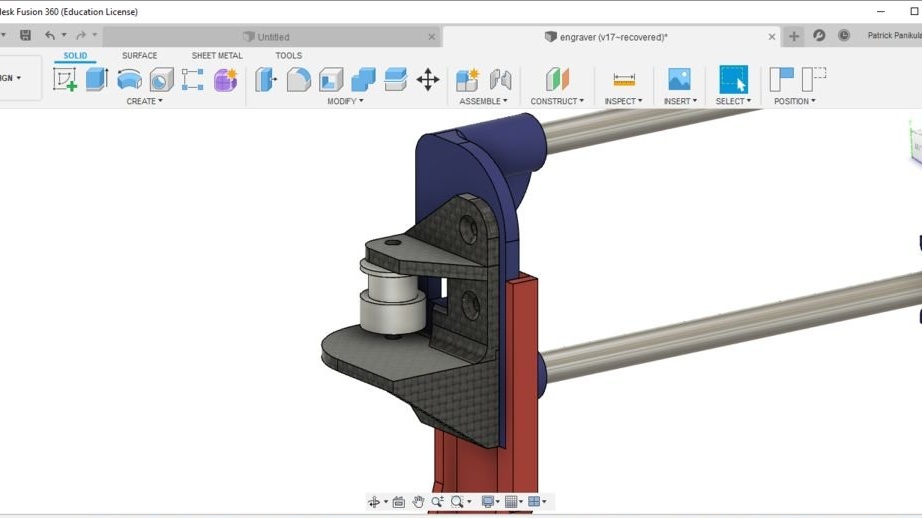
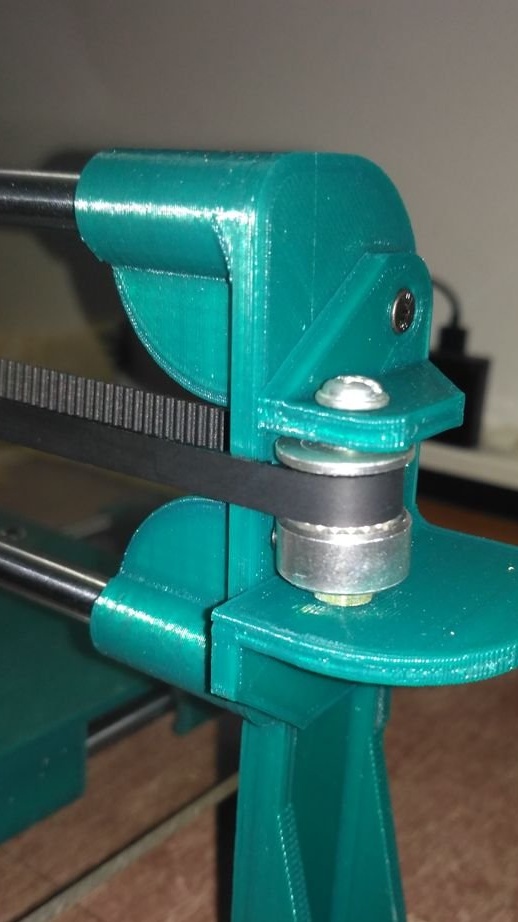
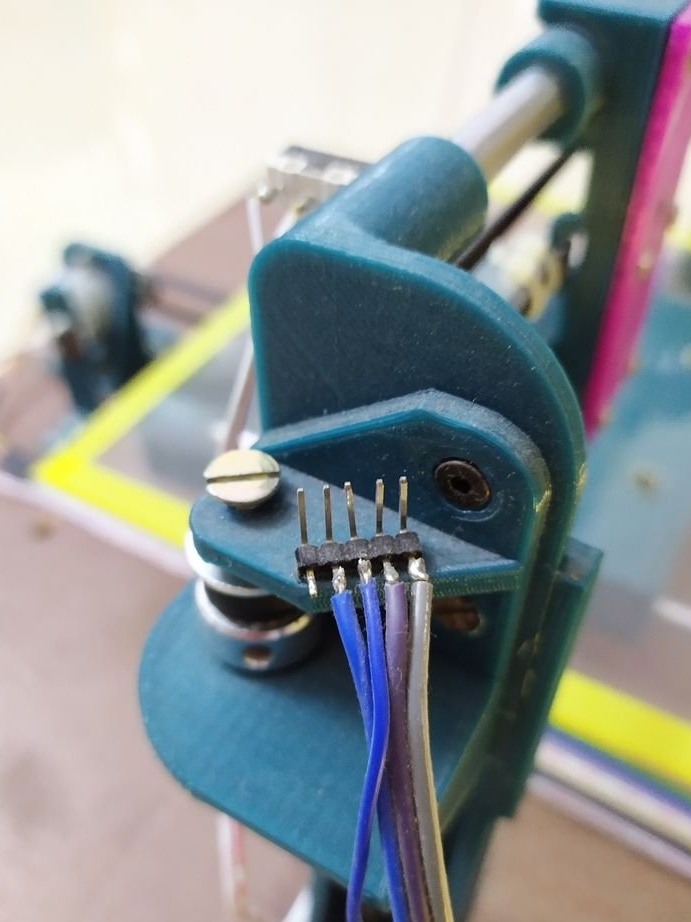
Pasang pemegang pulley menggunakan pemegang pulley Y pulley, pulley, 40 mm M4 bolt / kacang dan pencuci logam seperti yang ditunjukkan dalam dua gambar pertama.


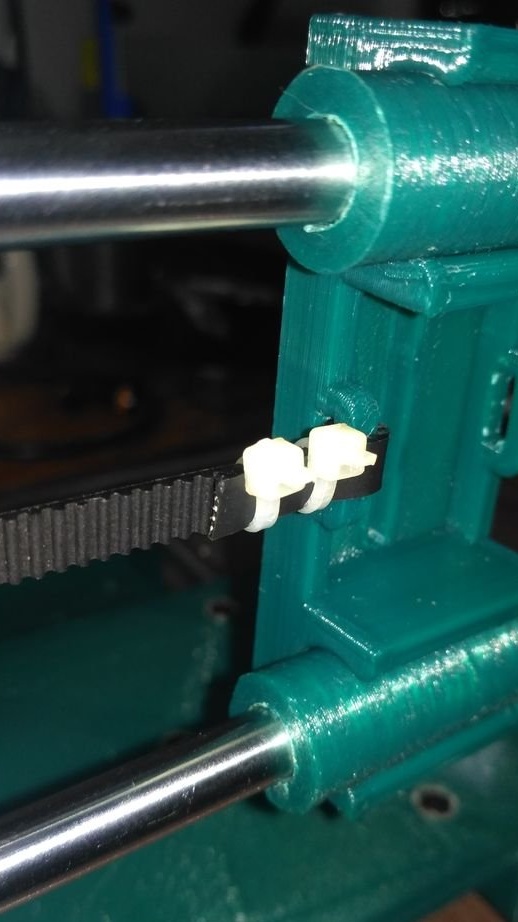
Kini mengikat satu hujung tali pinggang masa ke salah satu slot di bawah pengangkutan paksi Y.
Pas hujung bebas tali pinggang melalui pemasangan pulley yang anda buat sebelum ini, dan kemudian snap ke alur kedua yang terletak di bawah pengangkutan Y axis.
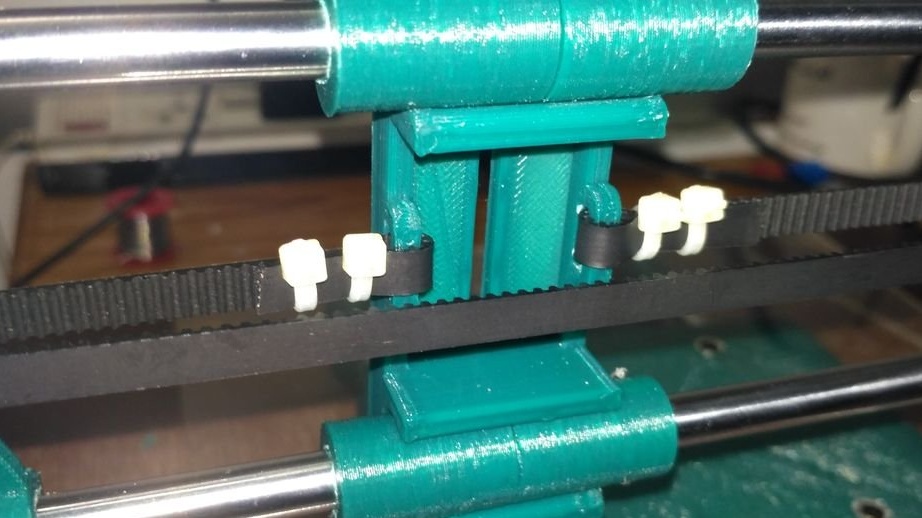
Selepas 3 langkah ini selesai, anda perlu mengetatkan perhimpunan paksi Y ke papan lapis.



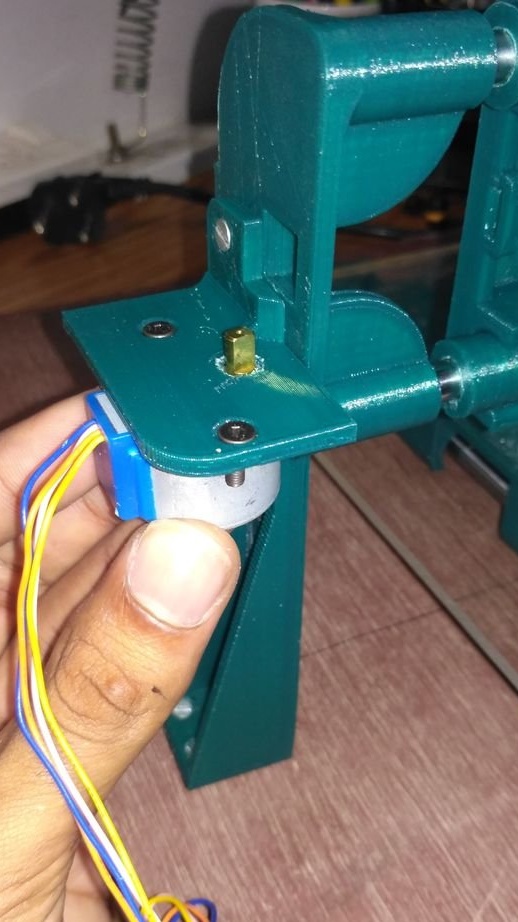
Pasang motor stepper ke paksi motor paksi Y menggunakan dua bolt 12 mm M3 dan kacang.
Sekarang skru pemegang pulley Y-axis dan mount enjin ke pangkalan papan lapis.Lakukan ini selepas menyesuaikan kedua-dua belah pihak untuk mendapatkan ketegangan tali pinggang yang betul. Tensioner belt akan ditambah kemudian.

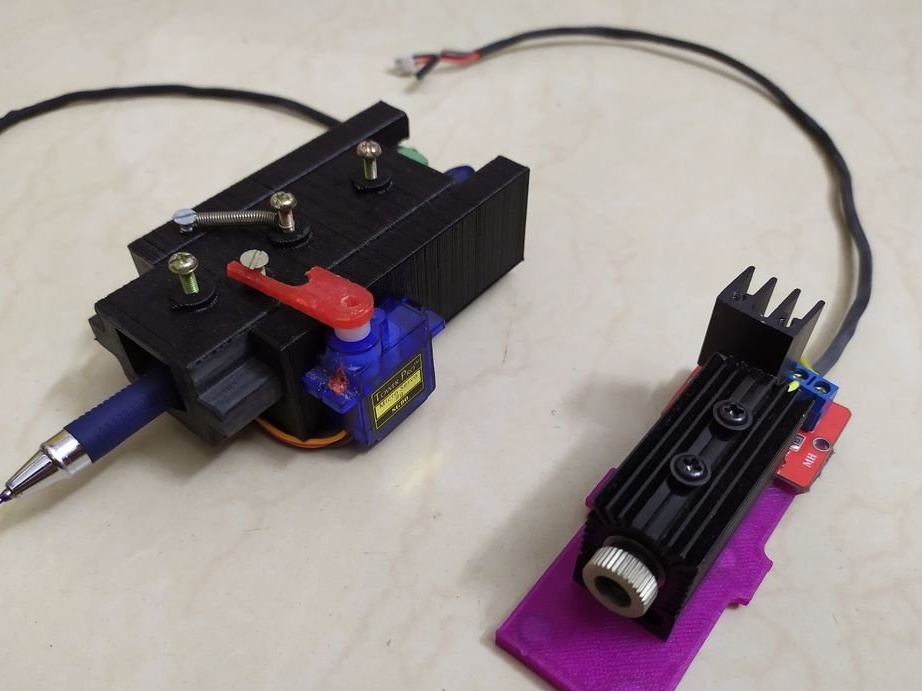
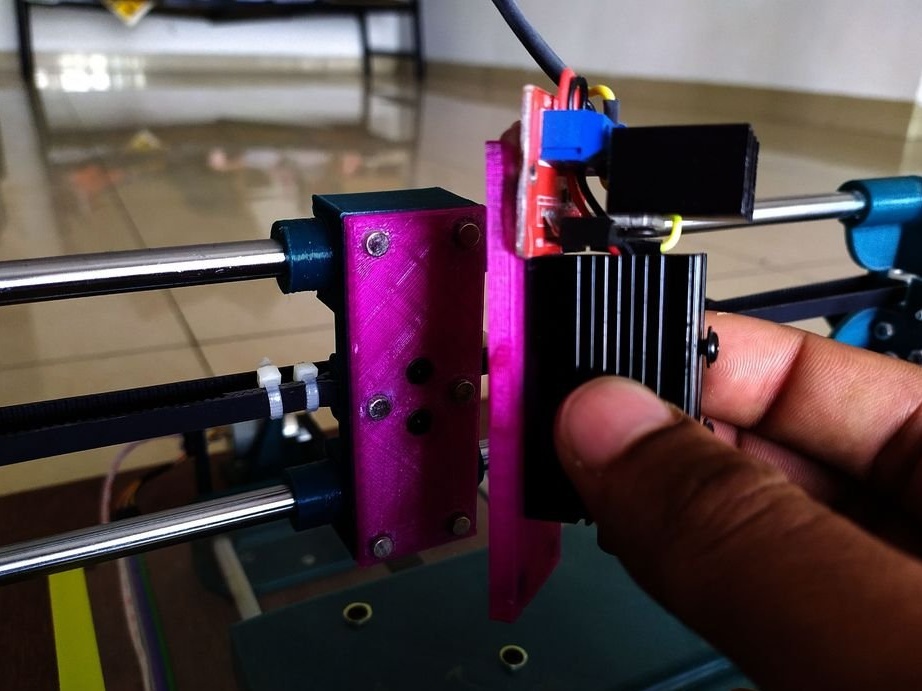
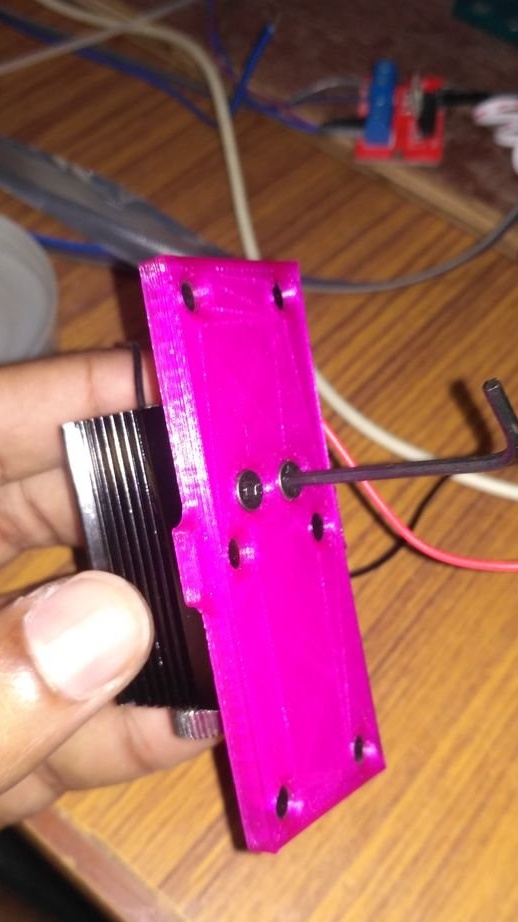
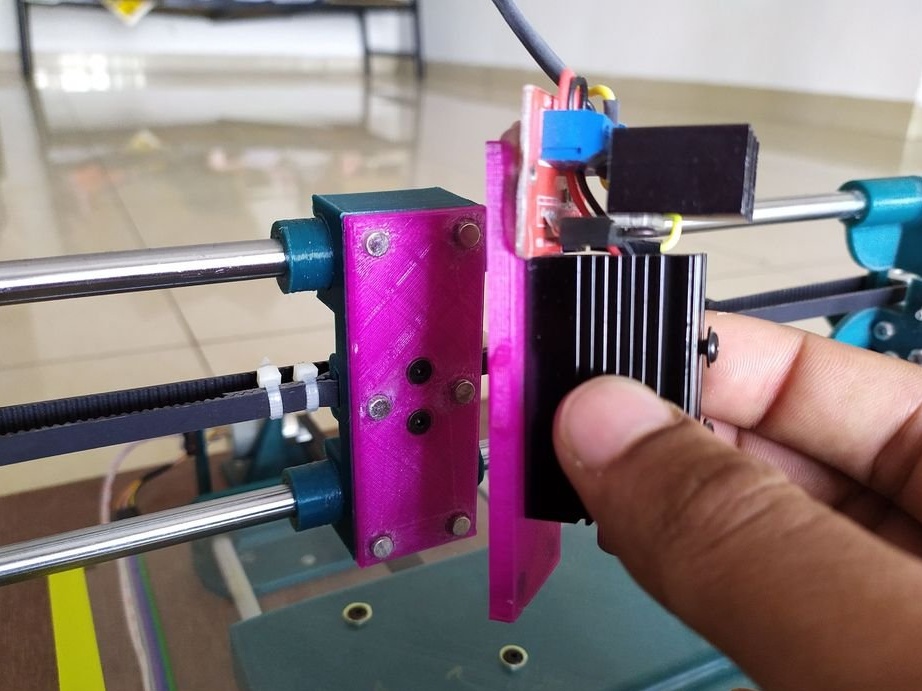
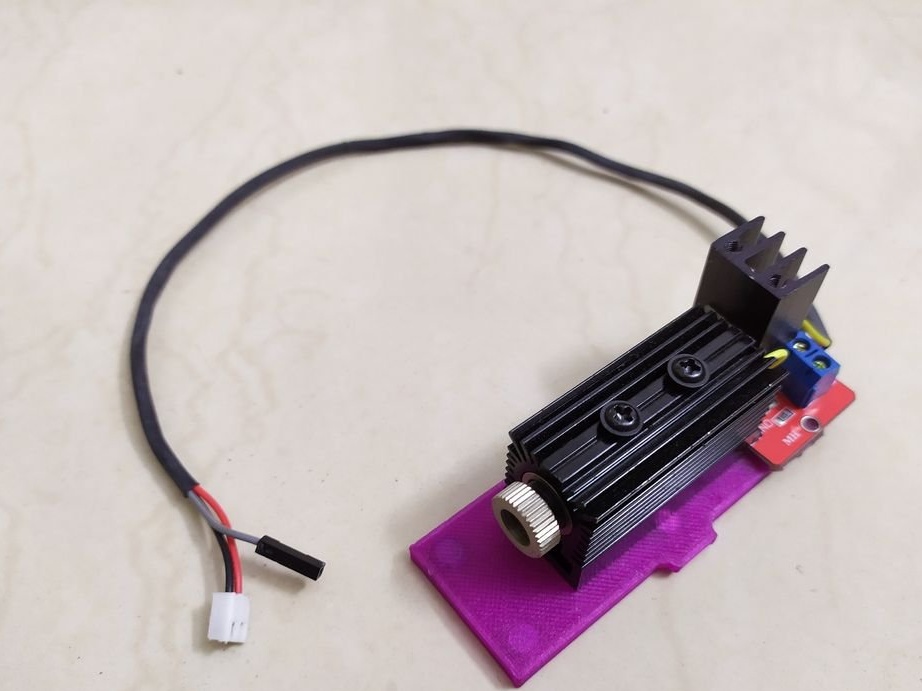
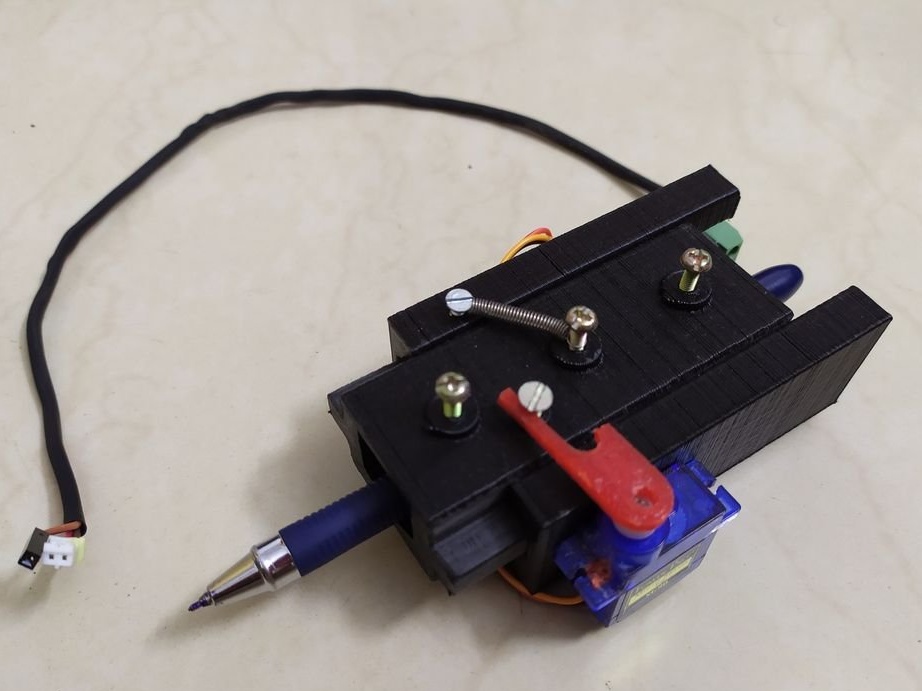
Langkah Sepuluh: Modul Laser
Seperti yang ditunjukkan, dalam spesifikasi, mesin itu melaksanakan penggantian cepat modul laser dengan modul eksekutif lain. Untuk ini, tuan membuat dua bahagian segi empat tepat (penutup). Enam magnet neodymium dipasang di setiap. Satu penutup dipasang pada paksi X, modul laser dilampirkan kepada yang lain.
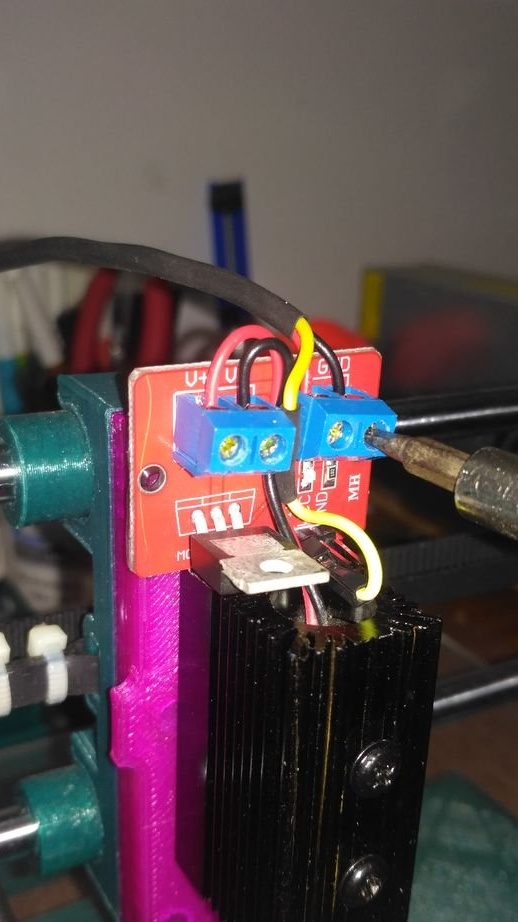
Wayar dipasang seperti berikut.
+ dan - laser disambungkan kepada V + dan V, masing-masing, daripada modul MOSFET. Kuasa disambungkan kepada VCC dan GND masing-masing. Wayar isyarat disambungkan kepada pin isyarat modul MOSFET.




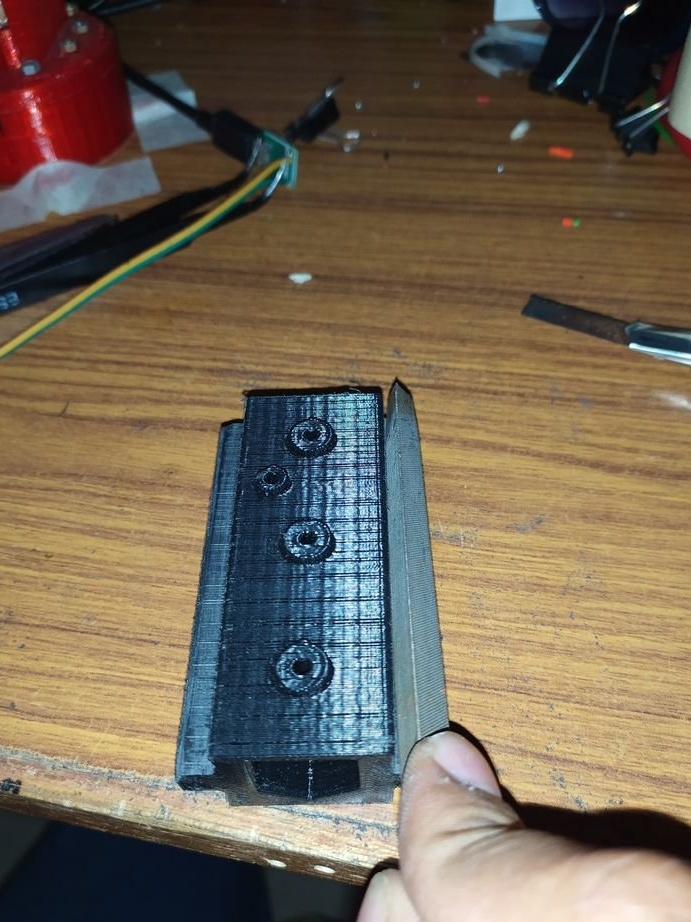
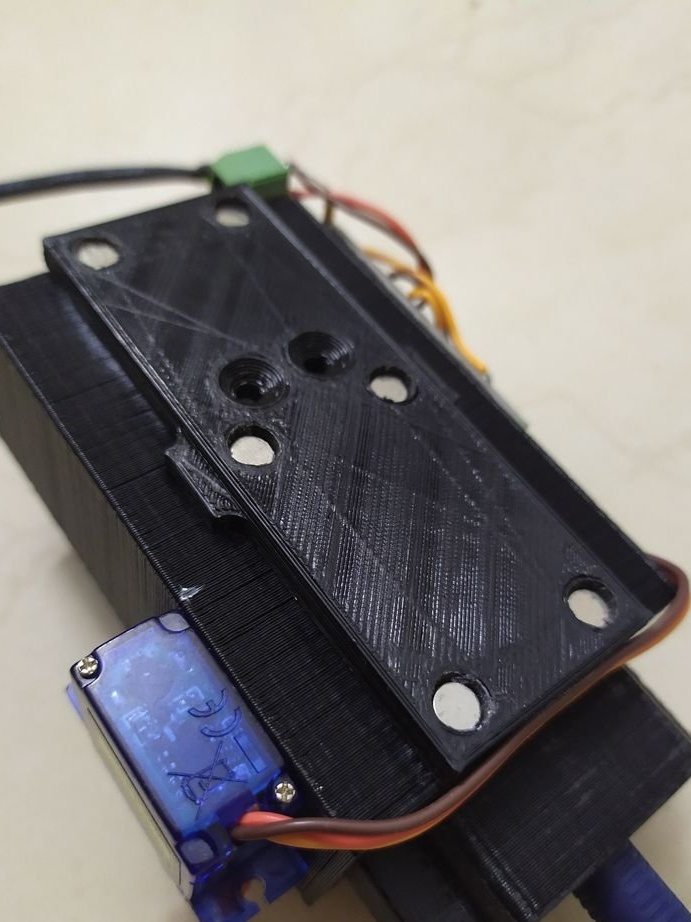
Langkah sebelas: plotter
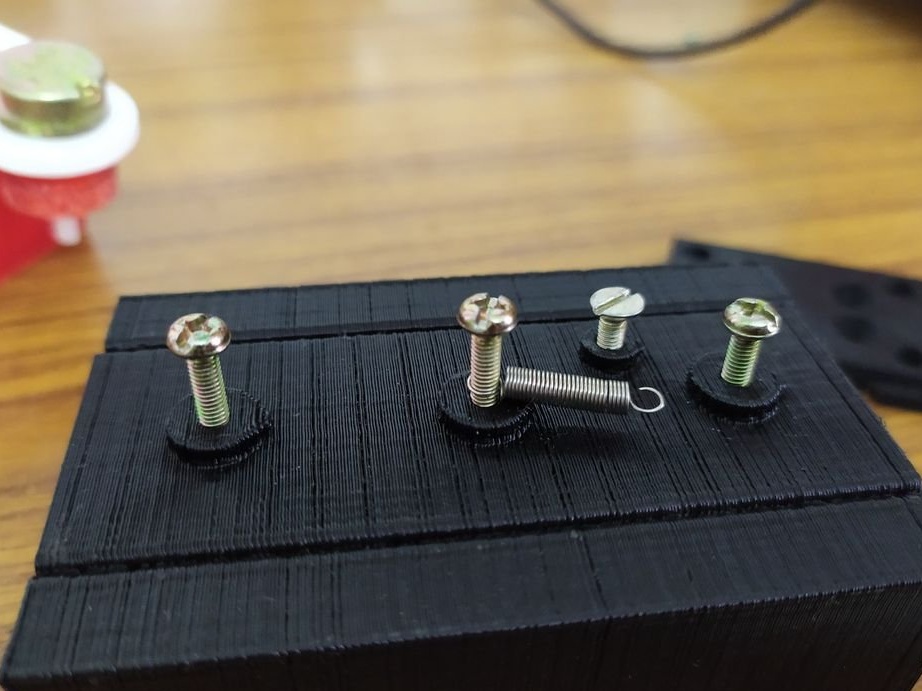
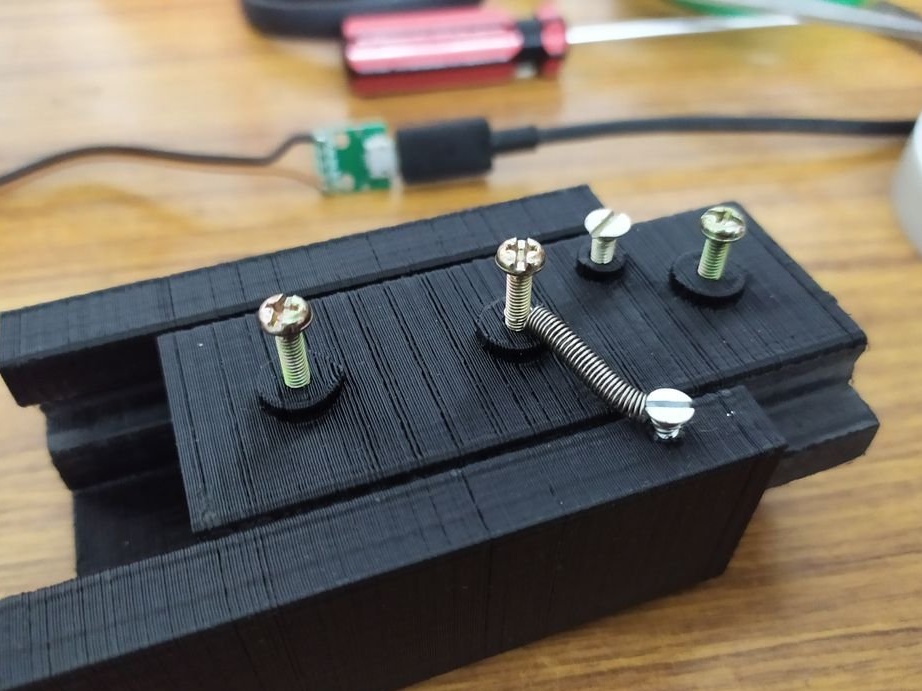
Kumpulkan plotter. Sebaik sahaja kedua-dua bahagian dicetak, tuan mengasah pesawat yang bersentuhan satu sama lain, melicinkan mereka dengan fail dan kertas pasir sehingga kedua-dua bahagian tergelincir dengan geseran yang sangat sedikit.



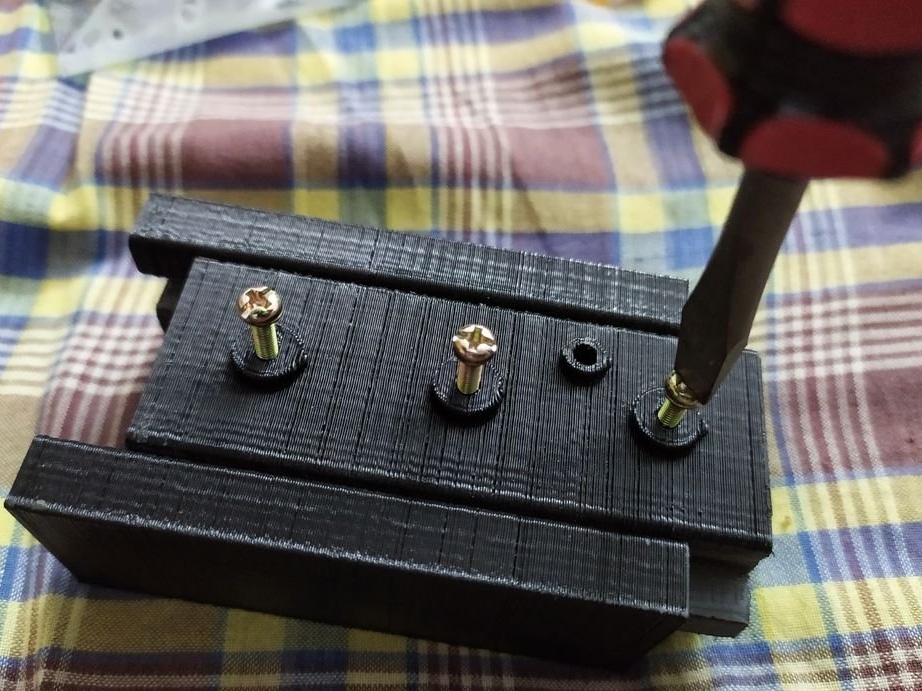
Kini mengetatkan skru M3 40 mm dan menetapkan musim bunga.
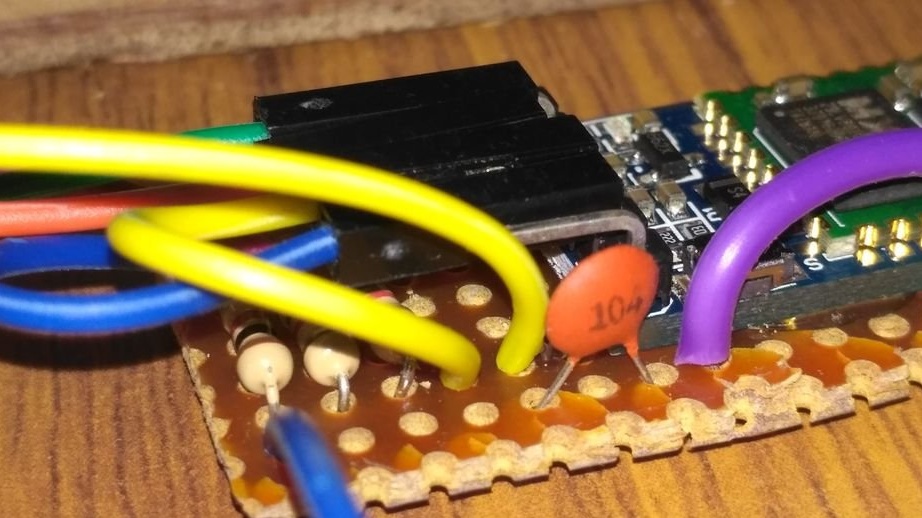
Motor servo, terminal dan batang Arduino seperti ditunjukkan dalam foto.
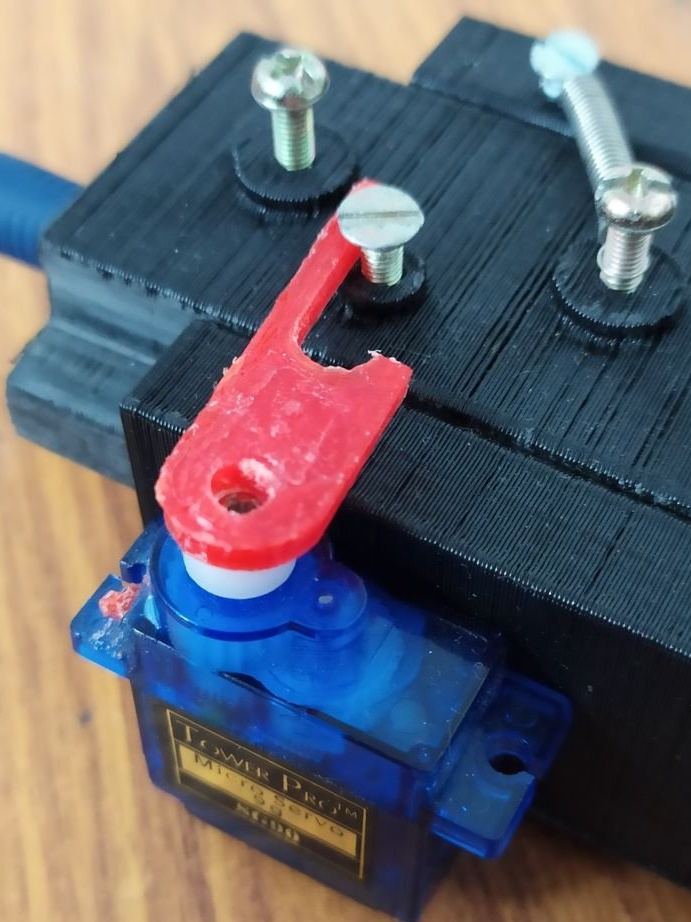
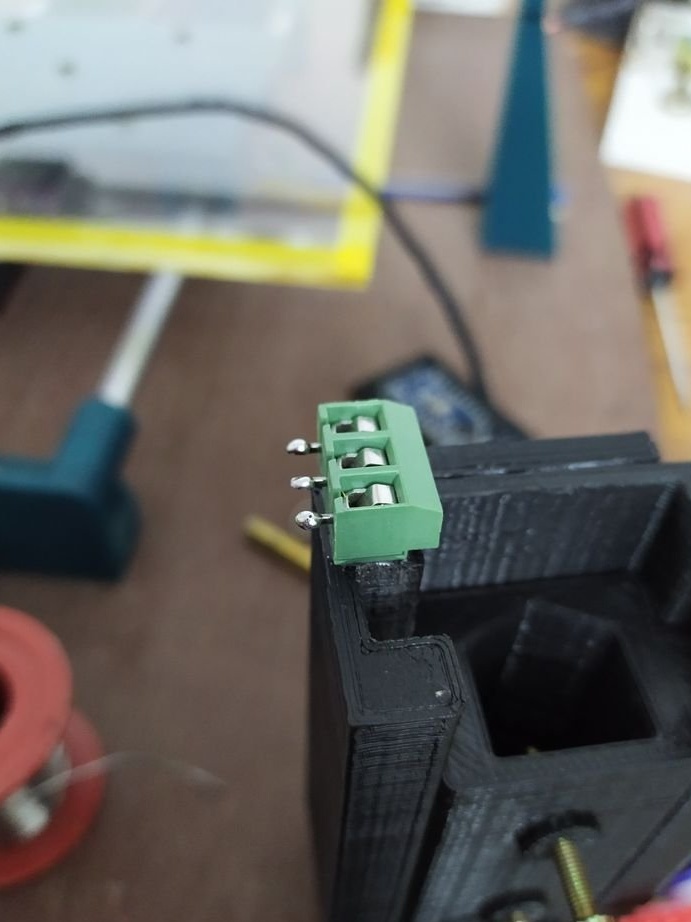
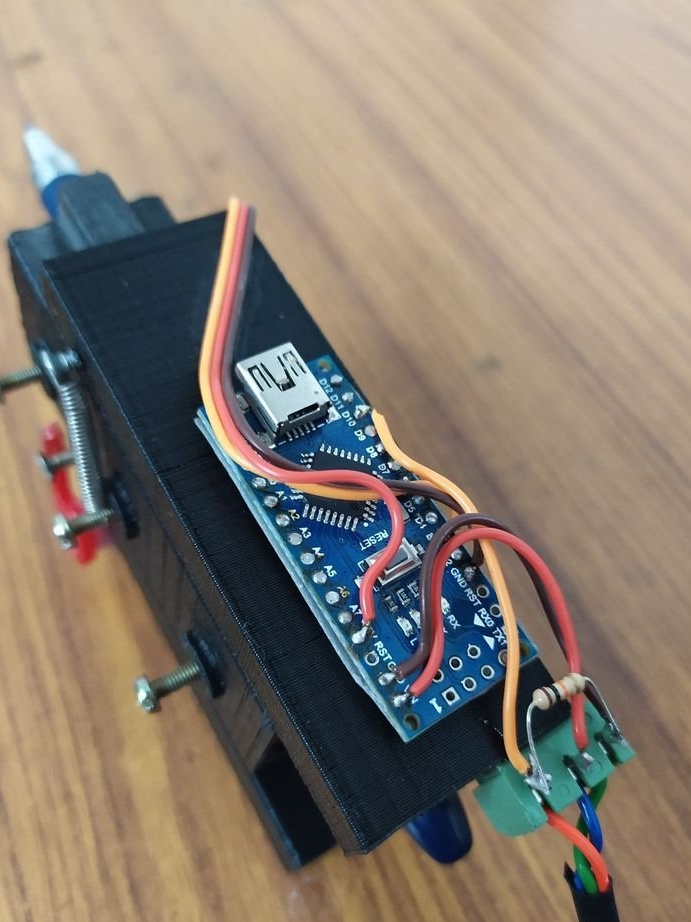
Di sini Arduino nano digunakan untuk menukar isyarat kawalan laser kepada isyarat PWM yang boleh memandu mikromotor.
Ia disambungkan seperti berikut:
+5 Volt - Vin
-5 Volt - GND
Isyarat - D10
Power Servo + ve - 5V
Servo power -ve - GND
Isyarat servo - D3
Kemudian kod tersebut dimuatkan.
#include Servo myservo;
batal persediaan ()
{
myservo.attach (3);
pinMode [10, INPUT];
}
kekosongan gelung ()
{
jika (digitalRead (10) == TINGGI)
{
myservo.write (20);
}
lain
{
myservo.write (60);
}
}
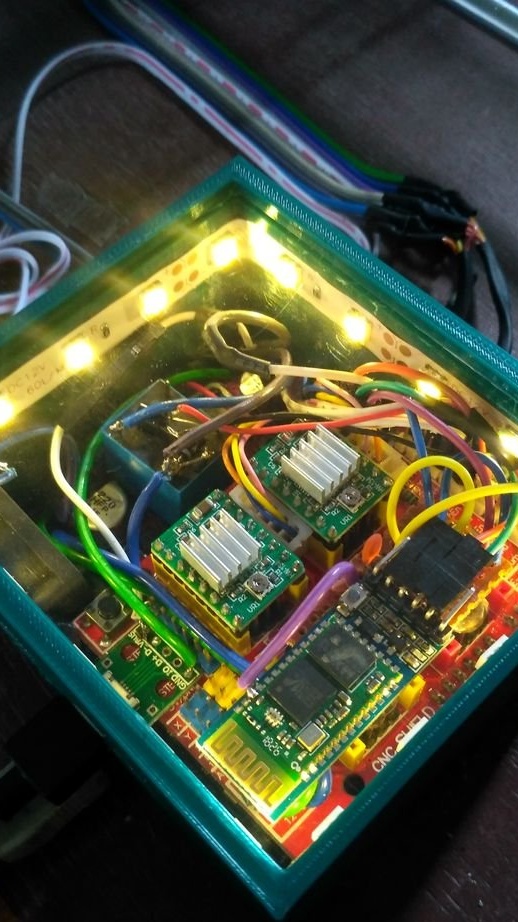
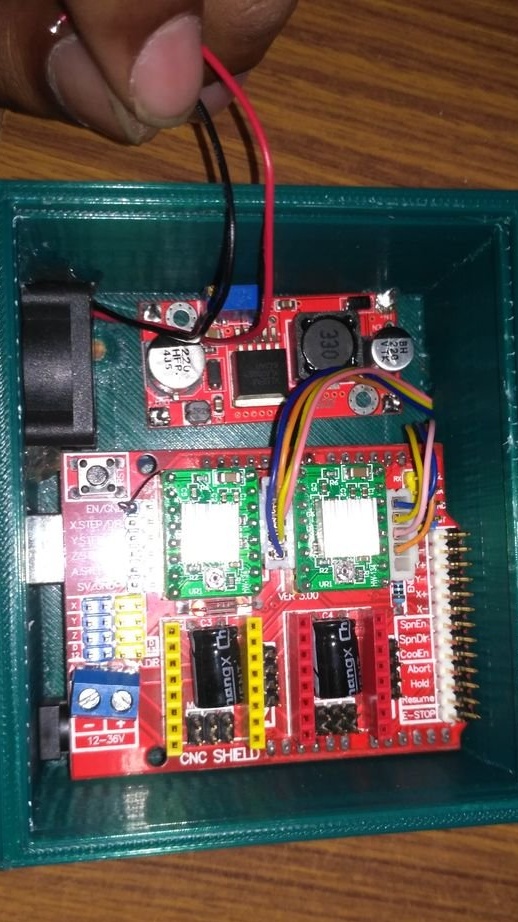
Langkah Dua Belas: Pemasangan
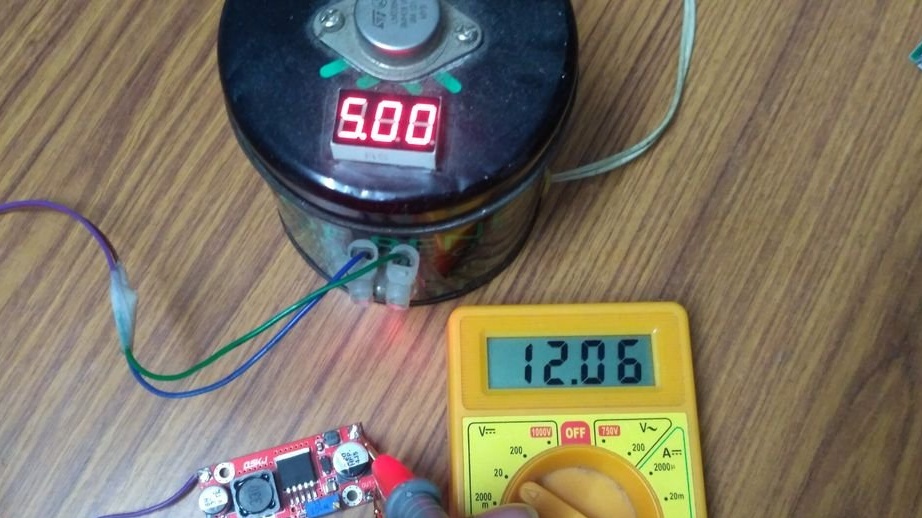
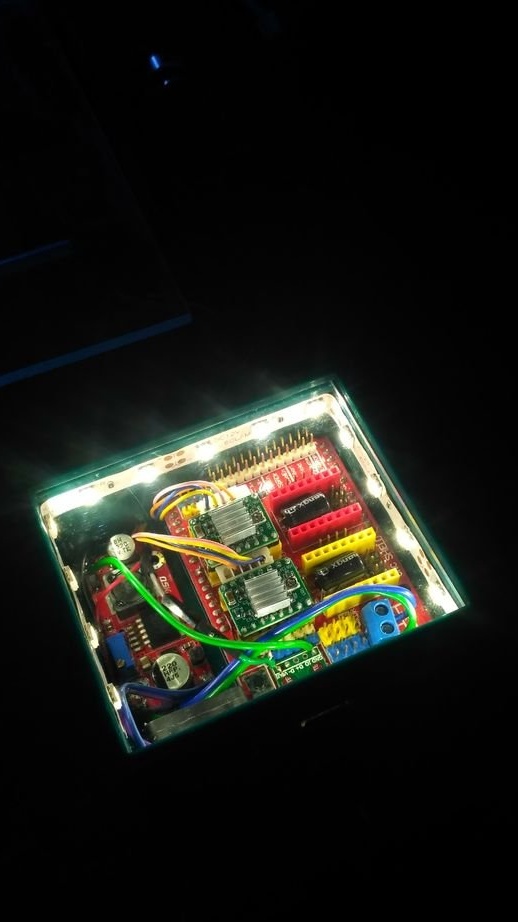
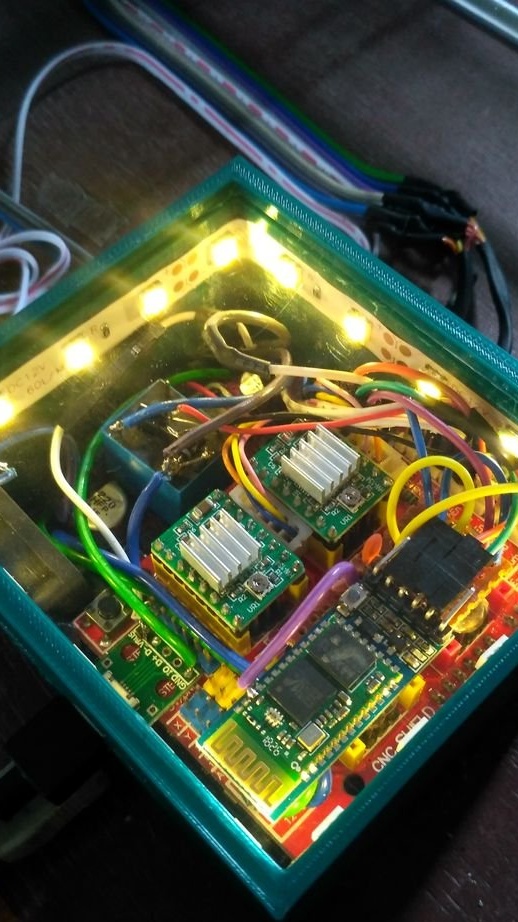
Pemasangan mengikut skim.
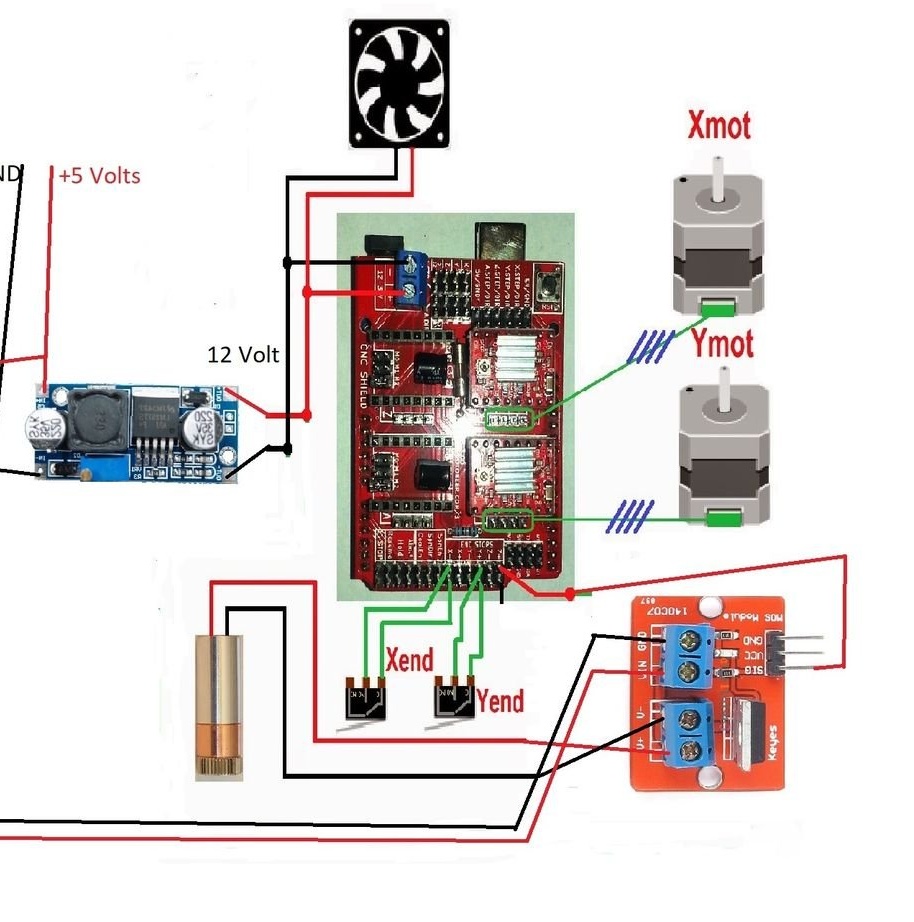
Penukar rana ditetapkan kepada 12V.
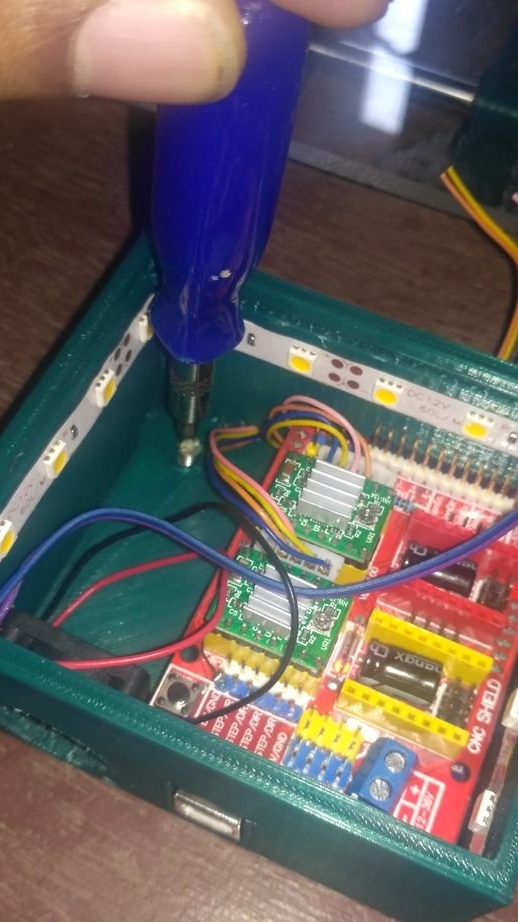
Arduino dipasang dalam modul pengembangan CNC.
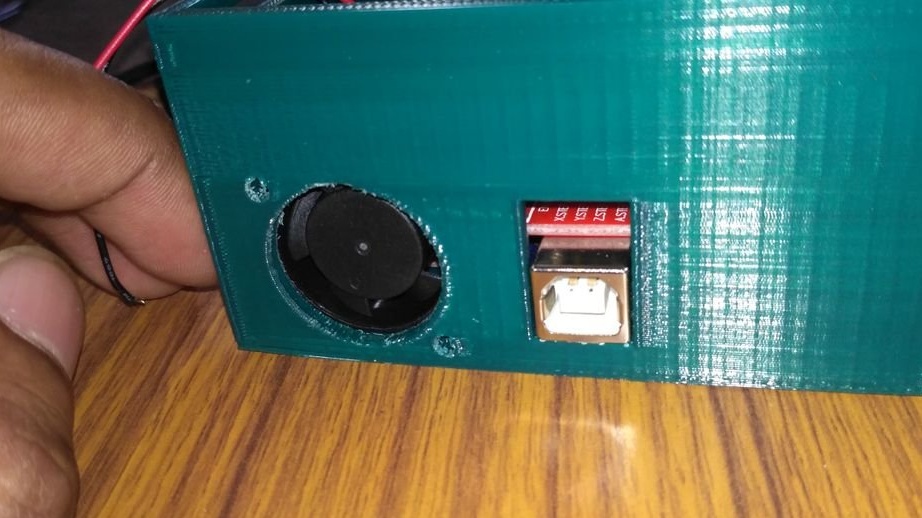
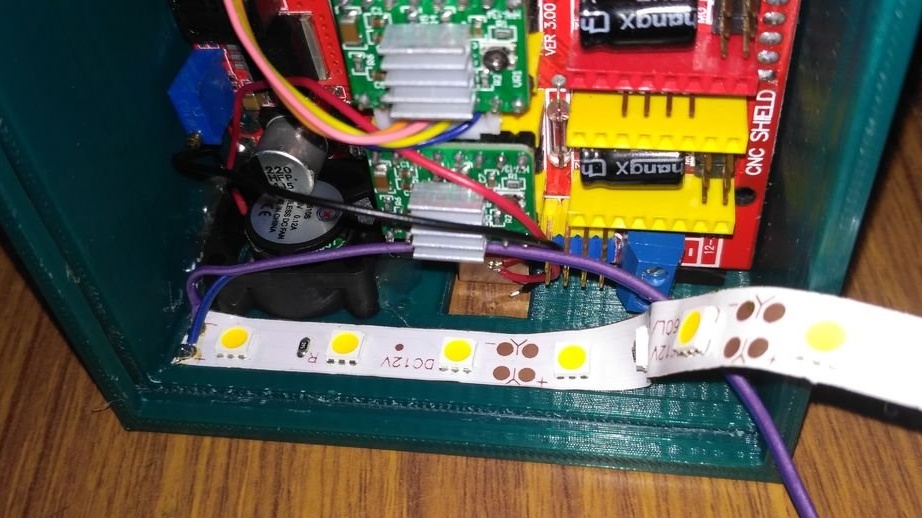
Kipas terpaku pada lubang yang disediakan untuk ini dengan pelekat mencairkan panas.
Strip LED telah ditambah untuk penampilan dan penunjuk kuasa.
Kasut dicetak diskru ke papan lapis.
Lembaran akrilik telus 87 x 75 mm 2 mm tebal digunakan sebagai penutup badan. Ia boleh dimasukkan melalui alur yang disediakan untuknya di satu sisi perumahan.
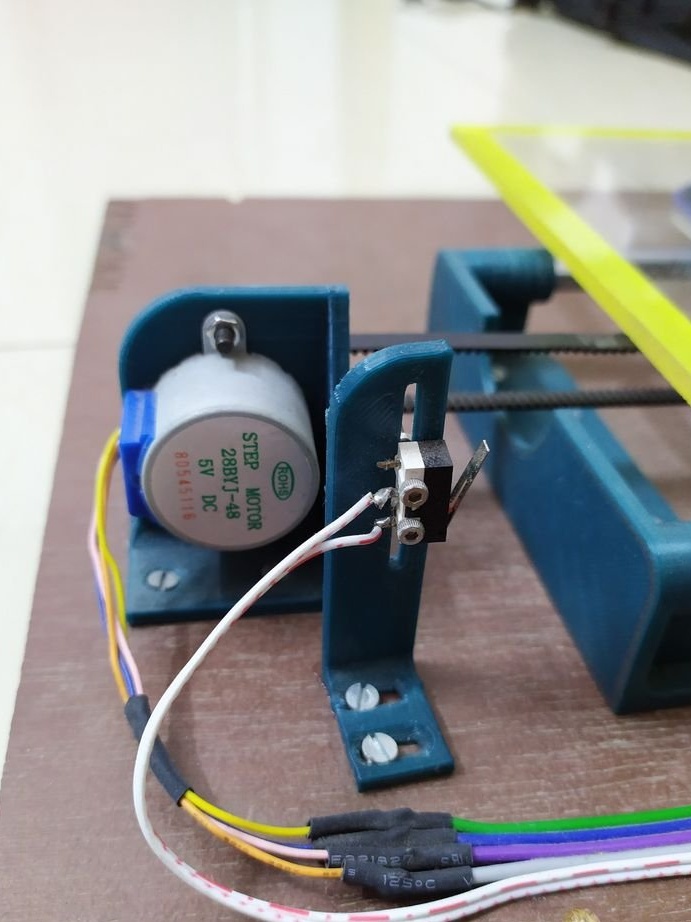
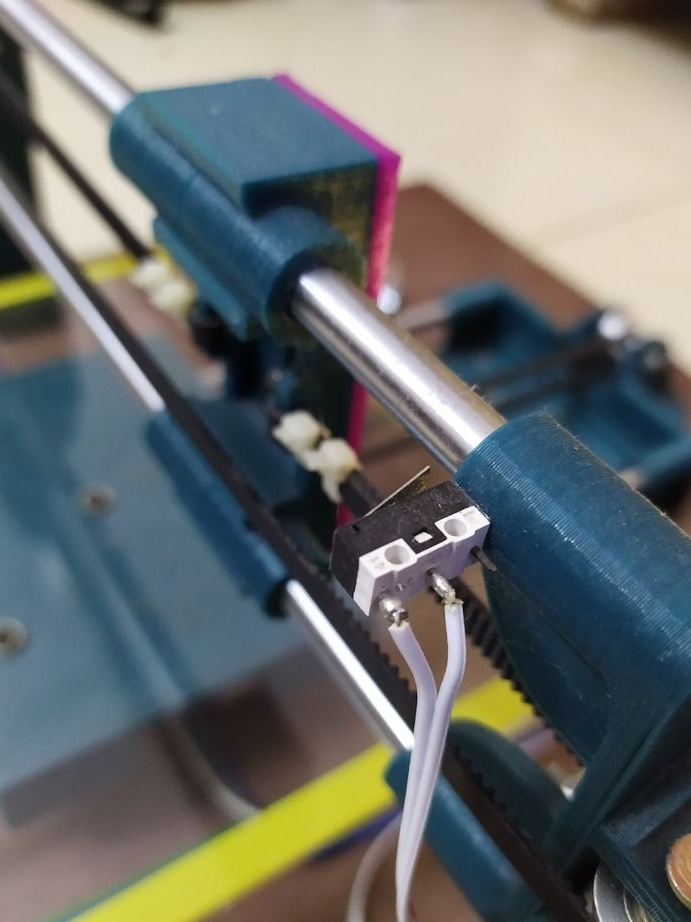
Suis batas dilampirkan supaya butang ditekan 3 mm sebelum galas setiap kenderaan berlanggar dengan pemegang daya tarikan.
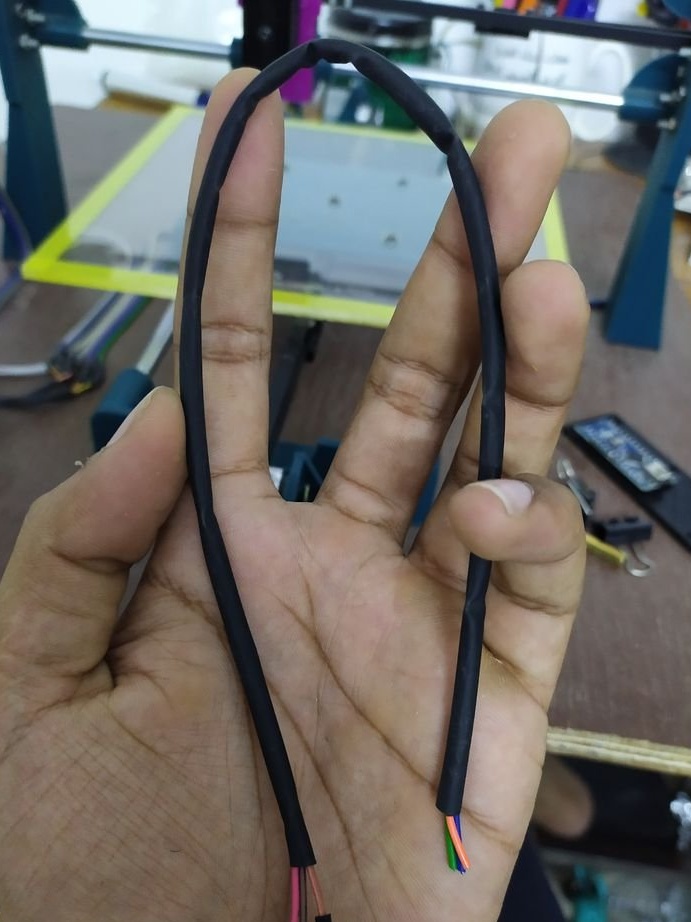
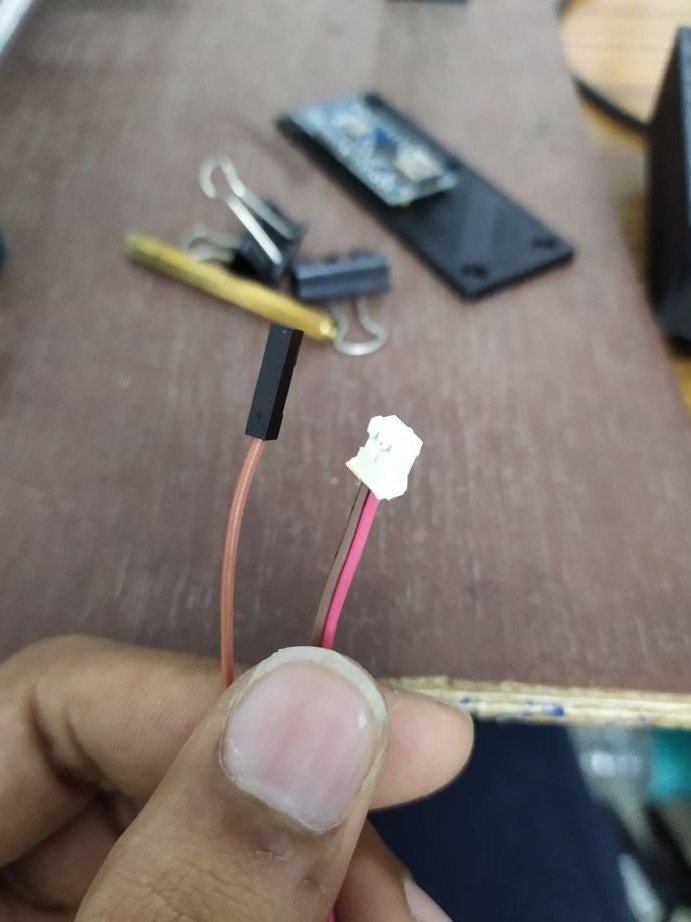
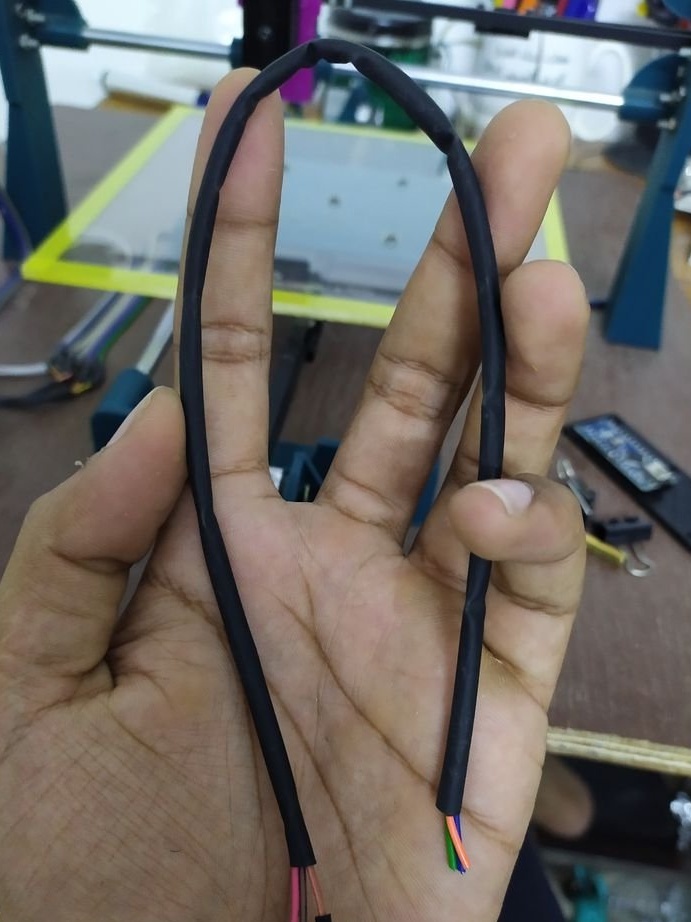
Kabel untuk motor dan suis had dipanjangkan dan sambungannya terlindung.

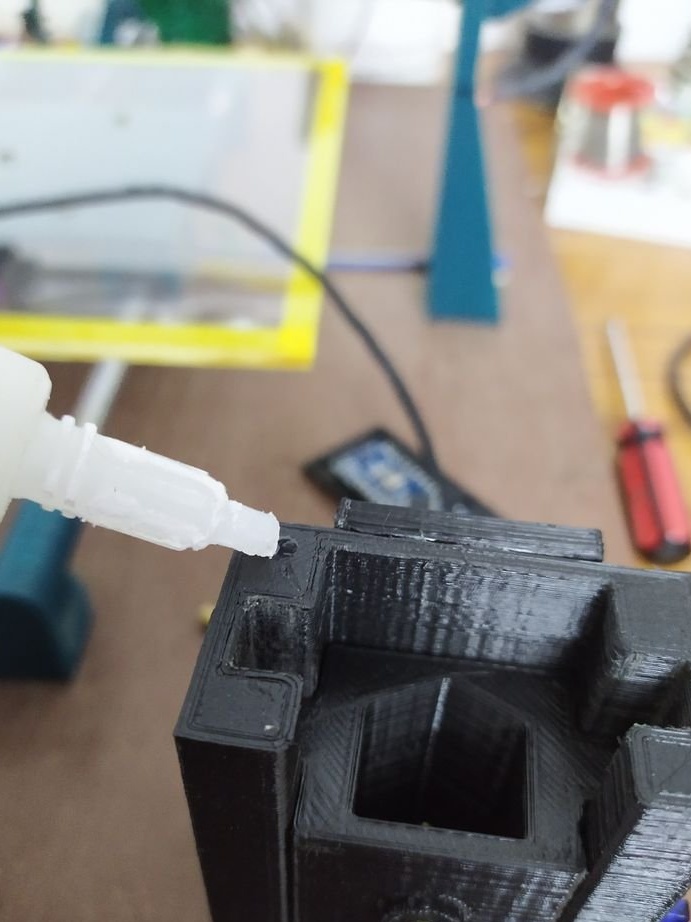
Wayar terpaku pada papan lapis dengan superglue.
Di sini, penukar rangsangan hanya digunakan untuk menggerakkan cip pemandu motor A4988. Setiap motor menggunakan hanya 150 mA semasa.
Langkah Tiga belas: Modul Bluetooth
Melancarkan modul bluetooth.
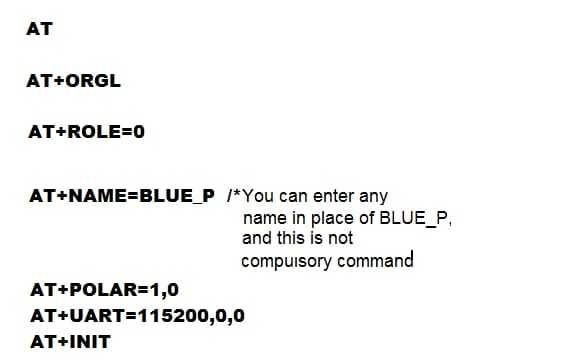
Untuk menghantar dan menerima data atau, dalam kes ini, G-kod melalui modul Bluetooth HC05, anda mesti terlebih dahulu mengkonfigurasi modul.
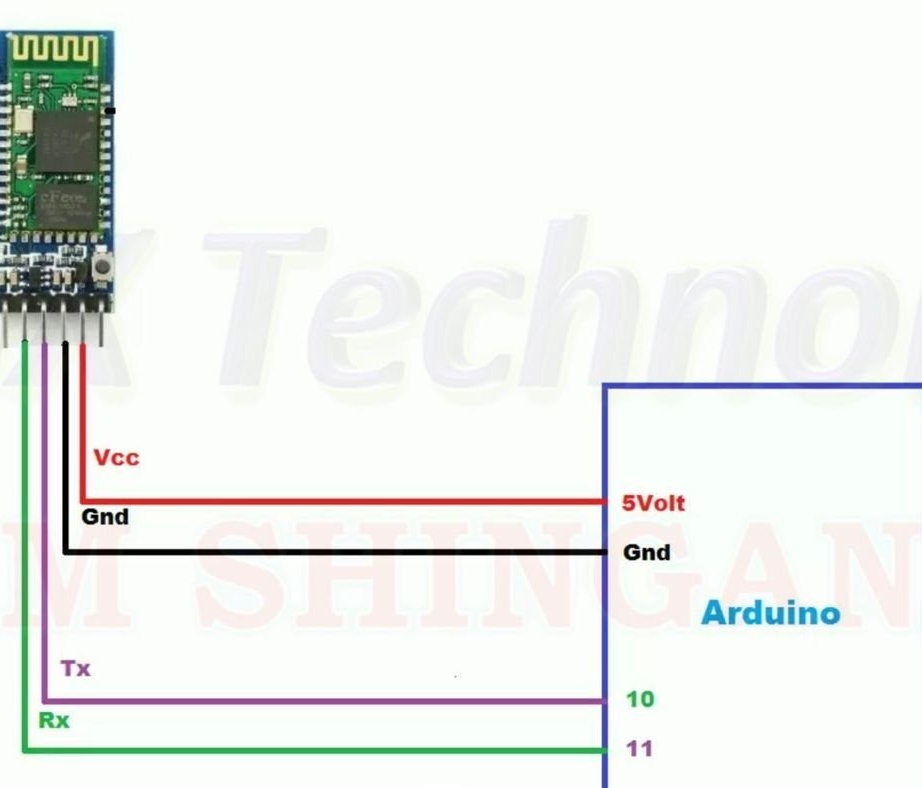
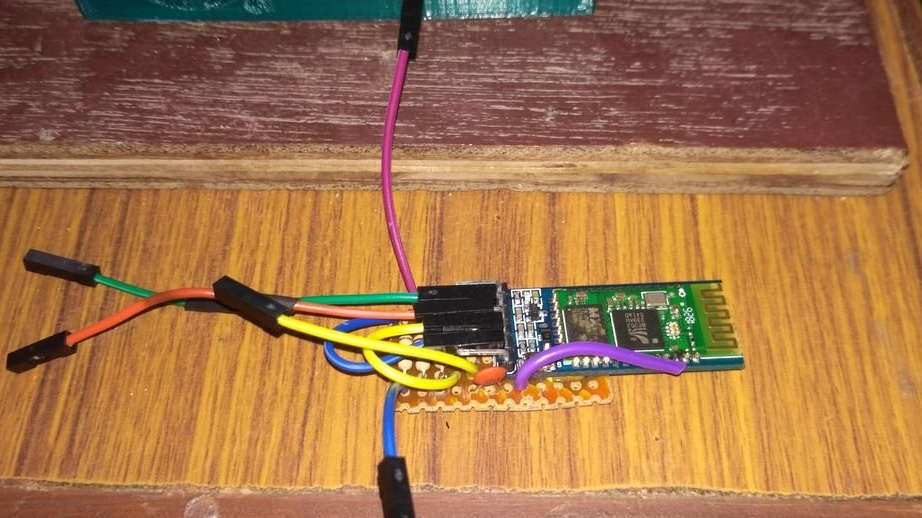
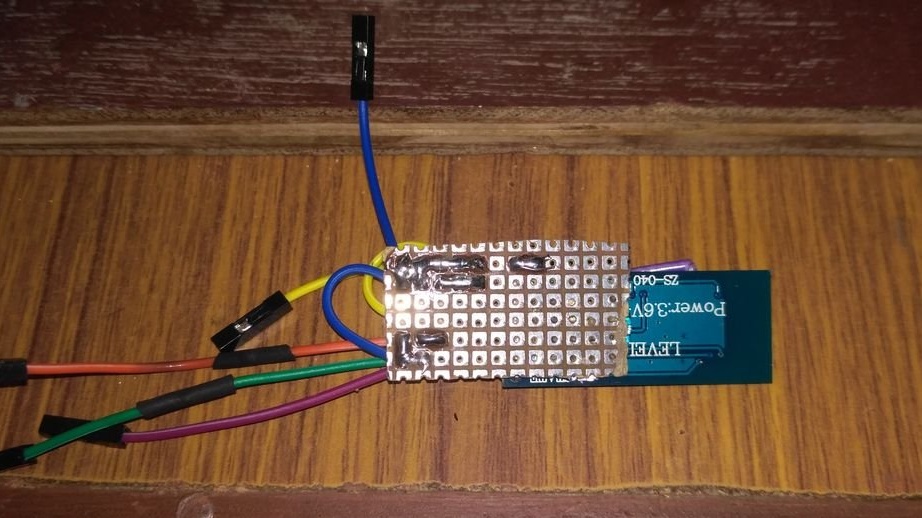
Sambungkan modul HC05 ke Arduino Uno, seperti yang ditunjukkan dalam angka pertama.
Muat turun kod yang dilampirkan pada langkah ini ke Arduino.
BLUE_P.ino
Sekarang masukkan kod yang ditunjukkan dalam foto kedua.
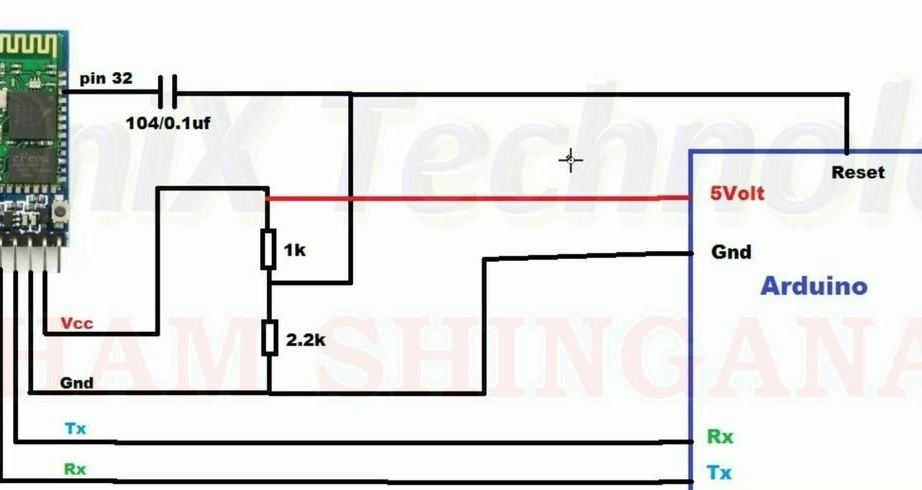
Selepas menyelesaikan tetapan, cabut modul HC05 dari Arduino yang anda gunakan untuk pengaturcaraan, dan sambungkan ke Arduino CNC Shield sesuai dengan rajah litar dalam gambar ke-3.


Langkah empat belas: kod dan persediaan
Untuk pemahat laser, tuan memuat turun kod itu.
GRBL.zip
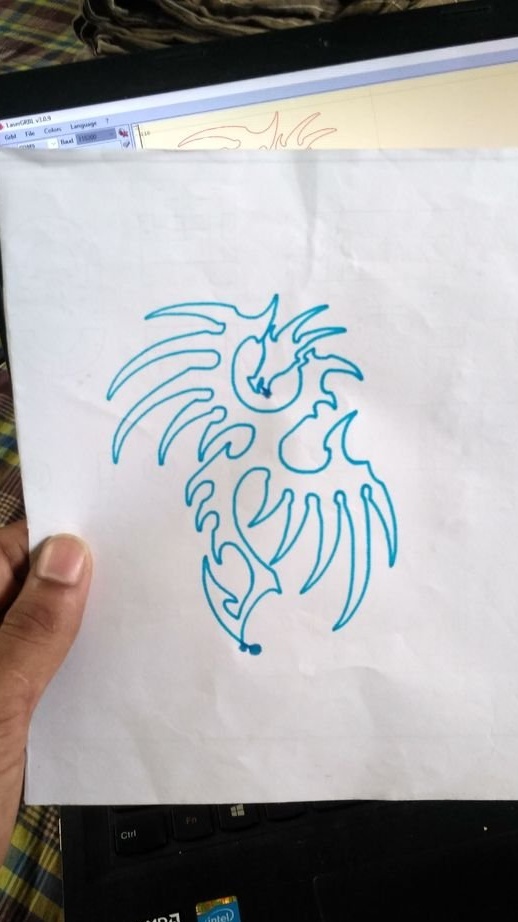
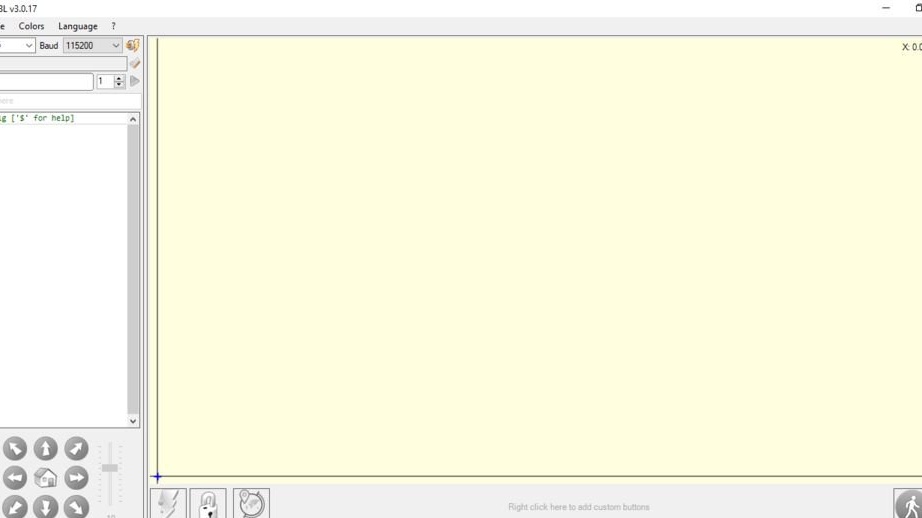
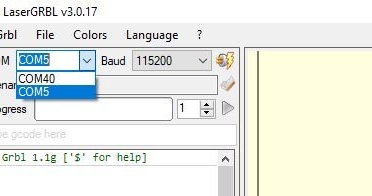
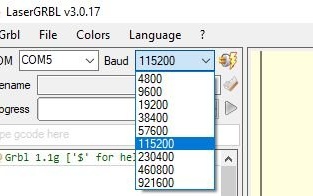
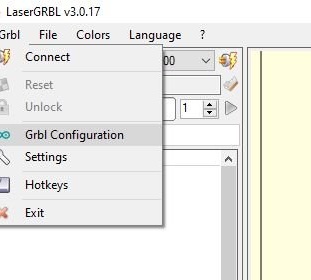
Laser GRBL adalah salah satu daripada streamers G-code percuma terbaik untuk pengukir laser. Ia boleh terus memindahkan G-codes ke Arduino melalui port som. Ia mempunyai alat terbina dalam untuk menukarkan imej ke G-codes.
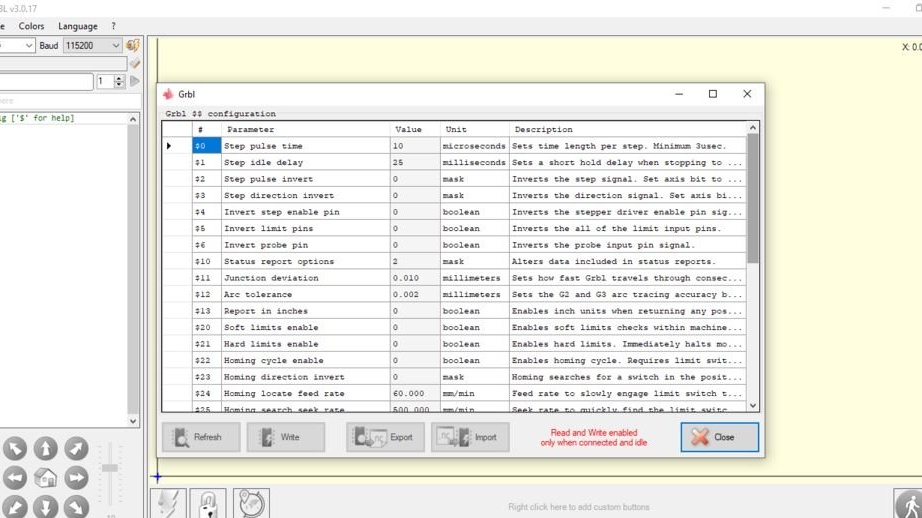
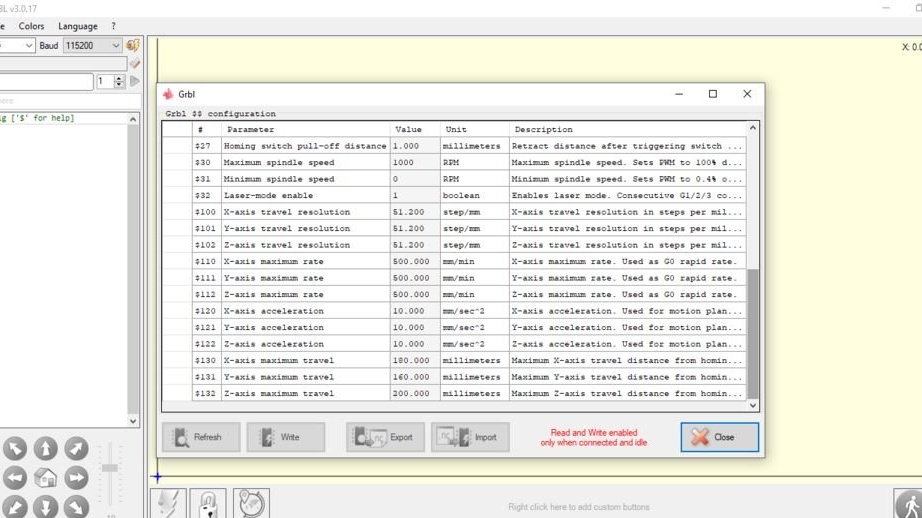
Semua tetapan mesti dilakukan seperti dalam foto, dengan mengambil kira perkara berikut:
Pasang pelabuhan ikan keli anda dengan penyambung laser.
Nilai konfigurasi boleh ditukar untuk disesuaikan dengan pencocokan anda.
Langkah Lima belas: Ujian
Selepas laser disambungkan, sudah tiba masanya untuk memeriksa ketepatannya.
Ada beberapa perkara yang perlu diperiksa:
Adakah paksi X dan Y bergerak ke arah yang betul?
Adakah homing berfungsi dengan betul?
Adakah langkah skip enjin disebabkan oleh geseran yang tinggi atau tali pinggang terlalu ketat.
Adakah saiz imej bercetak konsisten dengan saiz yang ditunjukkan dalam perisian. Adakah bilangan langkah per mm sepadan dengan motor stepper yang digunakan.
Ketegangan tali pinggang boleh diselaraskan dengan menggunakan ketegangan. Hidupkan bolt sehingga ketegangan yang betul dicapai.
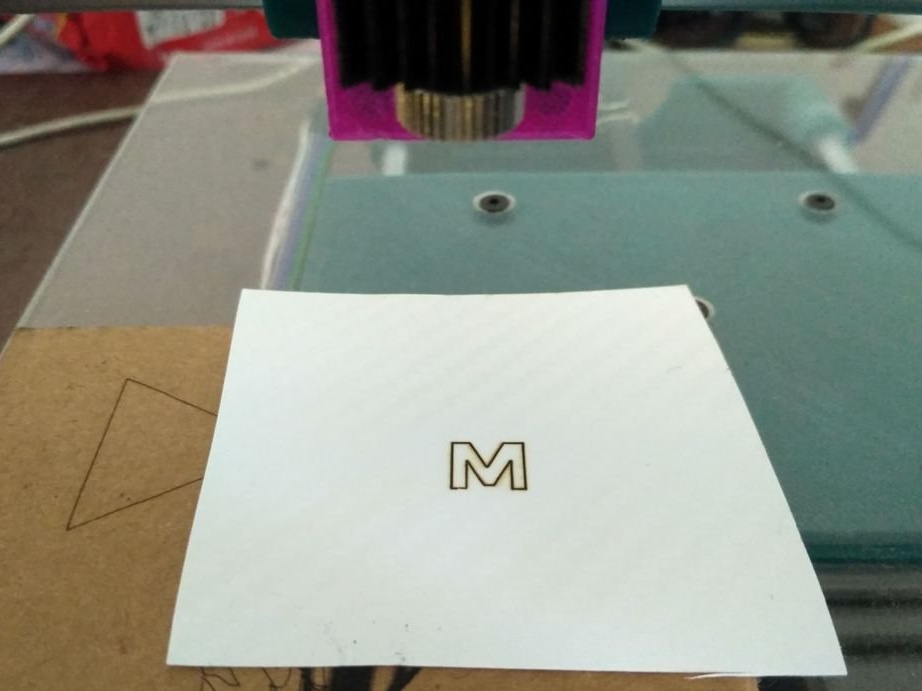
Untuk memeriksa sama ada enjin mempunyai langkah dan dimensi yang betul, keluarkan angka geometri yang berterusan ringkas, contohnya segiempat, segi tiga atau bulatan. Jika laser bermula dari satu titik dan berhenti ideal pada titik yang sama, ini bermakna bahawa laser anda tidak terlepas satu langkah dan berfungsi dengan sempurna. Selepas segitiga atau persegi dicetak, secara manual mengukur saiznya dengan pemerintah dan lihat jika ia sepadan dengan dimensi yang anda nyatakan.

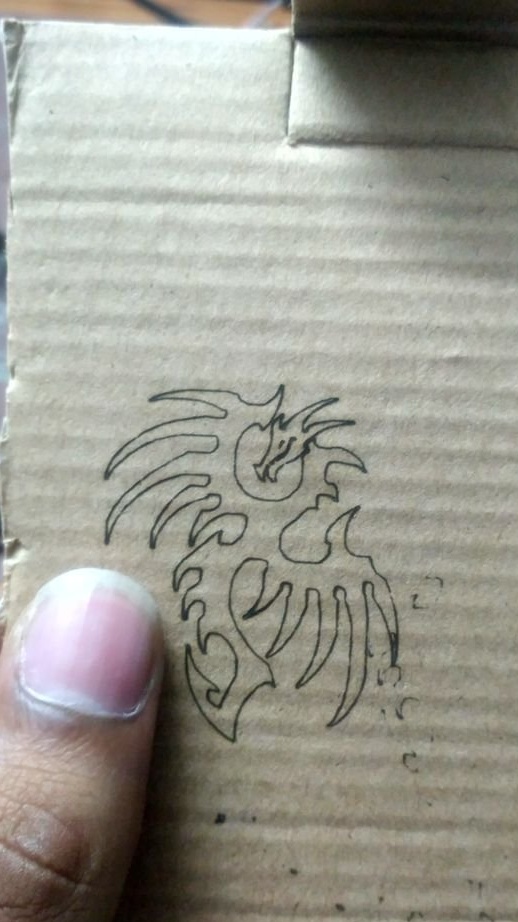
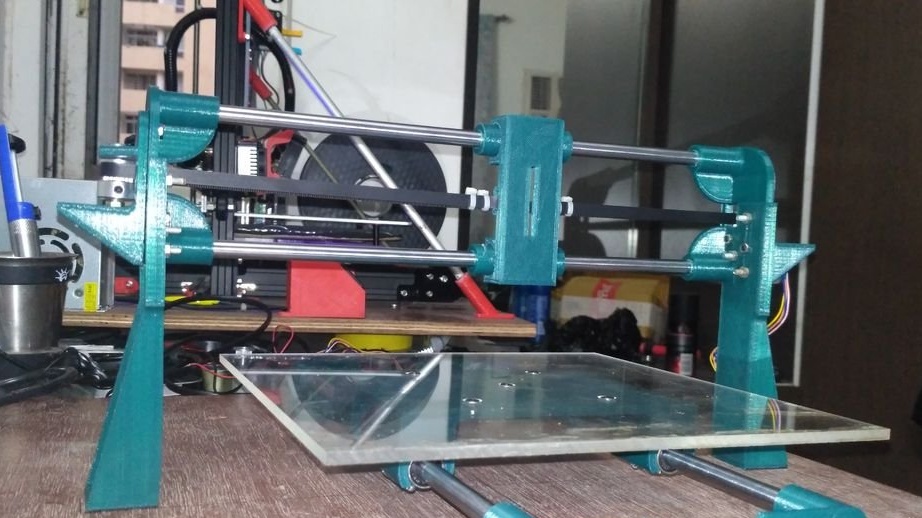
Menurut tuan, dia benar-benar berpuas hati dengan mesin itu.
Boleh diukir pada pelbagai bahan, seperti kayu, kadbod, kulit, plastik, dll.
Oleh kerana enjin mempunyai kira-kira 102 langkah per mm, ukiran kecil dengan butir-butir halus boleh dibuat.
Pengukir bekerja tanpa masalah pada bekalan kuasa USB.